毫米波雷达点云SLAM系统
基于毫米波雷达点云数据的三维SLAM(同步定位与建图)系统,用于狭窄环境如室内和地下隧道的三维建图。
项目概述
本项目实现了一个完整的SLAM系统,利用毫米波雷达采集的点云数据进行实时定位和环境三维重建。系统特别针对狭窄空间环境进行了优化,适用于GPS信号不可用的室内和地下场景。
主要功能
- 毫米波雷达点云数据预处理与滤波
- 特征提取与匹配
- 点云配准与位姿估计
- 回环检测
- 全局优化
- 三维环境重建与可视化
技术特点
- 基于因子图优化的SLAM框架
- 针对稀疏点云的特征提取算法
- 改进的ICP(迭代最近点)算法用于点云配准
- 轻量级回环检测
- 分层式地图表示
依赖环境
- Python 3.8+(兼容至Python 3.11)
- 相关依赖库(见requirements.txt)
安装与设置
安装项目依赖:
# 创建虚拟环境
python3 -m venv venv_slam
source venv_slam/bin/activate # Linux/Mac
# 或者
venv_slam\\Scripts\\activate # Windows
# 安装依赖
pip install -r requirements.txt
Open3D可视化依赖
Open3D需要特定的图形驱动支持以启用可视化功能。以下是不同系统的设置指南:
Linux (Ubuntu/Debian)
# 安装OpenGL库和X11支持
sudo apt-get update
sudo apt-get install -y libgl1-mesa-dev libgl1-mesa-glx xvfb
macOS
# 确保已安装XQuartz (X11)
brew install --cask xquartz
Windows
确保已安装最新的图形驱动程序,可从显卡制造商网站下载:
- NVIDIA: https://www.nvidia.com/Download/index.aspx
- AMD: https://www.amd.com/en/support
- Intel: https://www.intel.com/content/www/us/en/download-center/home.html
使用方法
-
运行测试:
python src/main.py --test可选参数:
--headless: 在无头模式下运行,不显示可视化界面,但会保存帧图像--config: 指定自定义配置文件路径--save_frames: 保存可视化帧为图像序列
-
处理实际数据:
python src/main.py --config config/default.yaml -
数据采集(使用实际雷达设备):
python src/data_collection.py --output data/input --device /dev/ttyUSB0 -
离线可视化:
python src/visualization/visualization.py --map_path results/map_TIMESTAMP.pcd --trajectory_path results/trajectory_TIMESTAMP.txt
无图形界面环境下的使用
在服务器或无图形环境下运行时,应使用以下命令:
# 使用headless模式并保存帧图像
python src/main.py --test --headless --save_frames
图像将保存在results/frames/目录下,可在离线环境中查看。
如果仍然遇到OpenGL相关错误,可以尝试:
-
在Linux系统上使用Xvfb创建虚拟显示:
xvfb-run -a python src/main.py --test --headless -
或者使用Mesa软件渲染:
LIBGL_ALWAYS_SOFTWARE=1 python src/main.py --test --headless -
通过SSH连接时,可能需要禁用X11转发:
ssh -X user@server export DISPLAY=:0 python src/main.py --test --headless --save_frames
离线渲染设置
系统支持通过配置文件调整离线渲染参数,在config/default.yaml中的offline_rendering部分:
offline_rendering:
background_color: [0.1, 0.1, 0.1] # 背景颜色
enabled: true # 是否启用离线渲染
frame_rate: 30 # 帧率
output_dir: frames # 输出目录名称
quality: high # 渲染质量
resolution: # 渲染分辨率
width: 1280
height: 720
save_frames: true # 是否保存帧
save_interval: 10 # 保存间隔(每n帧保存一次)
camera: # 相机设置
fov: 60.0 # 视场角
zoom: 0.7 # 缩放
position_offset: # 相机位置偏移
back: 5.0 # 向后偏移
up: 3.0 # 向上偏移
系统架构
该系统由以下核心模块组成:
- 预处理模块:对原始点云数据进行滤波、降采样和边缘提取
- 特征提取模块:使用ISS关键点检测代替Harris 3D提取稳定特征点
- 点云配准模块:实现帧间配准和位姿估计
- 回环检测模块:基于扫描上下文特征进行回环检测
- 图优化模块:基于g2o实现的位姿图优化
- 建图模块:构建和维护全局点云地图
- 可视化模块:实时显示SLAM过程和结果,支持离线渲染
配置文件说明
系统采用YAML格式的配置文件,可在config/default.yaml中调整各项参数:
- 数据路径配置
- 预处理参数
- 特征提取参数
- 点云配准参数
- 回环检测参数
- 优化参数
- 建图参数
- 可视化参数
- 离线渲染参数
结果输出
系统输出结果将保存在results/目录下:
- 点云地图(PCD格式)
- 轨迹文件(位姿序列)
- 可视化帧图像序列(如启用)
已知问题和解决方案
-
Harris 3D关键点检测问题:原始的Harris 3D关键点检测在较新版本的Open3D中不可用。已更新为使用ISS (Intrinsic Shape Signatures)关键点检测算法,提供了相同或更好的性能。如果ISS关键点检测失败,系统会自动回退到体素下采样方法。
-
可视化界面问题:在无图形环境(如远程服务器)下,可能无法显示交互式可视化窗口。已添加完善的离线渲染功能,通过
--headless --save_frames选项保存可视化结果为图像序列。系统会自动调整相机位置,跟随轨迹,并输出高质量的可视化结果。 -
Python导入问题:使用绝对导入路径解决了模块导入问题,确保在任何目录下运行都能正确导入依赖模块。
-
API兼容性问题:更新了代码以适应Open3D最新API,包括信息矩阵计算和全局优化选项的修改。
-
无头模式下的渲染崩溃:增强了错误处理机制,在遇到图形相关错误时能够自动降级到纯离线渲染模式,确保系统能够在任何环境下正常运行。
开发者说明
本系统在以下环境测试通过:
- Python 3.11.11
- Open3D 0.19.0
- NumPy 1.26.4
- macOS 13.5与Ubuntu 22.04
性能优化建议
如果处理大规模点云数据遇到性能问题,可考虑:
- 减小
voxel_size值增加下采样强度 - 调整
max_features限制每帧特征点数量 - 在配置文件中增加
max_points参数控制地图总点数 - 降低离线渲染的分辨率和保存频率以减少I/O开销
更新日志
2025-05-11 重大更新
本次更新主要解决了两个关键问题,提高了系统在无图形界面环境中的稳定性和兼容性:
-
Harris3D关键点检测替代方案实现
- 使用Open3D的ISS (Intrinsic Shape Signatures)关键点检测算法替代已弃用的Harris3D
- 添加了详细的配置选项,可通过YAML配置文件调整ISS参数
- 实现了多级回退机制,确保特征提取的稳定性:
- 优先使用Open3D内置的ISS实现
- 如果ISS检测失败,回退到体素下采样
- 增强了错误处理和日志记录
-
无头模式下的可视化改进
- 完全重构了可视化模块的离线渲染功能
- 实现了自动相机控制,根据轨迹动态调整视角
- 添加了可配置的帧保存间隔和图像分辨率
- 改进错误处理,即使在图形驱动有问题的服务器上也能正常运行
- 添加了详细的无头模式使用指南,包括多种环境下的配置方法
-
其他改进
- 更新主程序流程,确保结果文件的正确保存
- 改进了命令行参数解析
- 更新了配置文件结构,使其更加清晰和可扩展
- 添加了详细的文档和使用说明
这些改进使系统能够在各种环境下稳定运行,尤其是在无图形界面的服务器环境中,同时保持了高质量的可视化结果输出。





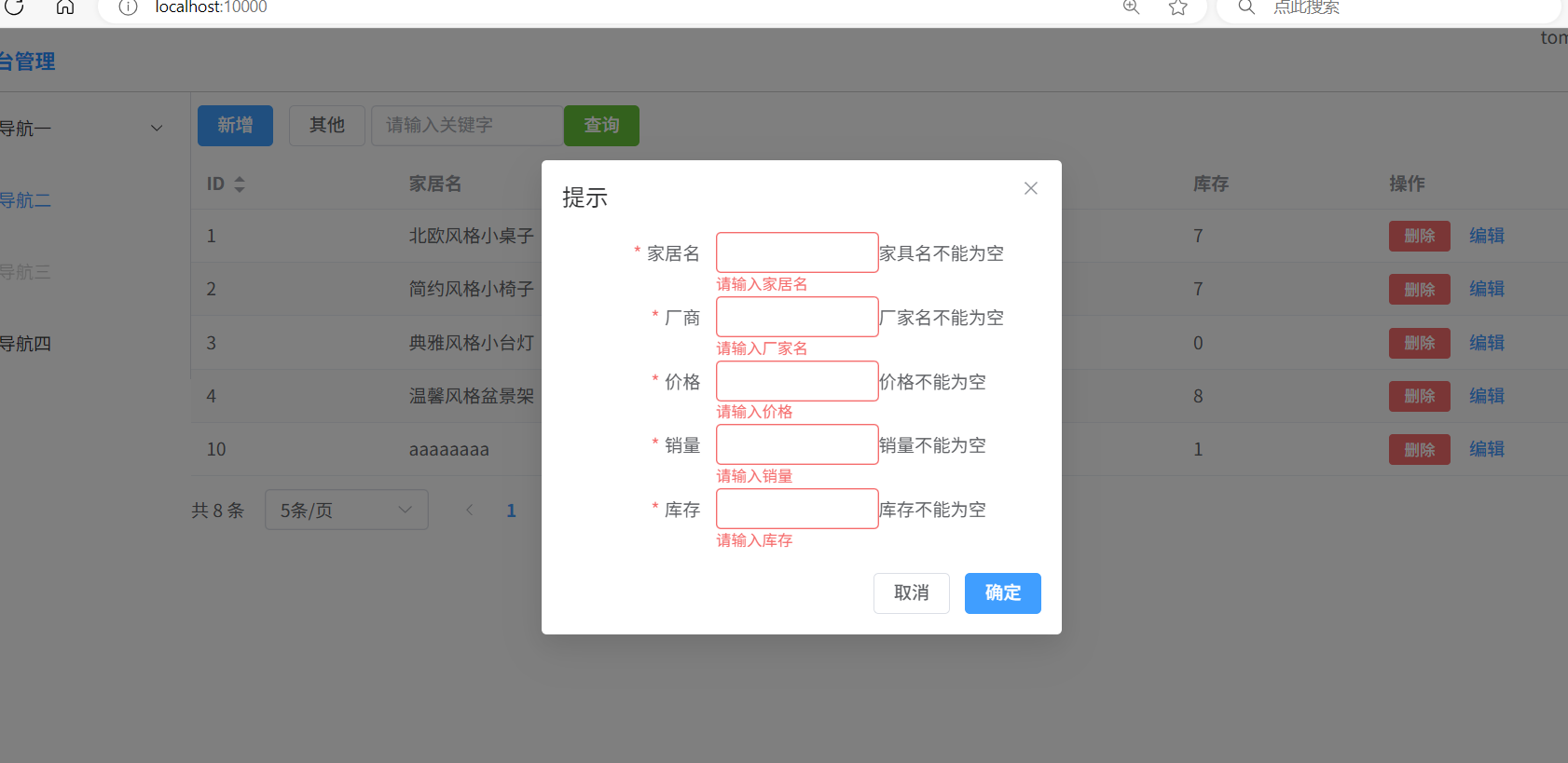
![[Java实战]Spring Boot 整合 Freemarker (十一)](https://i-blog.csdnimg.cn/direct/fa803baa80044fb2a9d9cb5fa25ce96d.png#pic_center)