1、本文实验基于冯康院士的《哈密尔顿系统的辛几何算法》开展,链接:https://pan.baidu.com/s/1GM0Px7SLWBWzh4sXmAdcwg
提取码:fmkt
2、虽然题目写的是基于FPGA的求解,但实际上采用的是VHLS来实现的,最近根本不想写verilog算法代码。本实验做的是简单谐振子运动方程组的运算,会给出matlab代码以及相应的FPGA仿真截图。
3、Hamiton方程
3.1.谐振子Hamiton方程的一般形式
初始条件为:
其精确解为:
3.2 采用《哈密尔顿系统的辛几何算法》第225页的一阶差分形式展开:
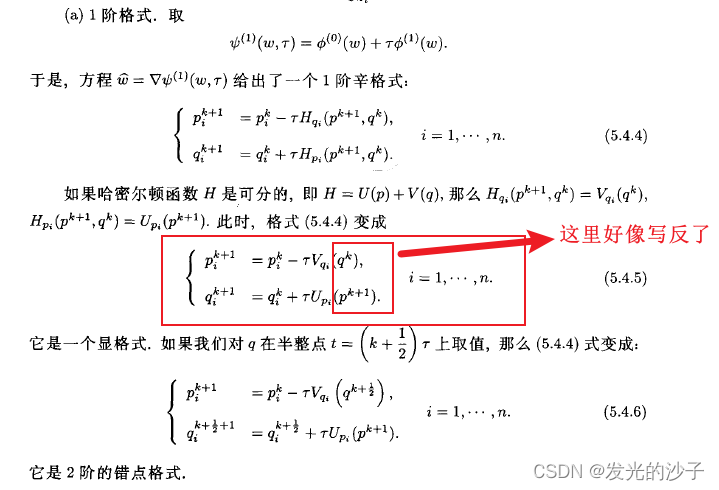
由论文《Hamilton系统下基于相位误差的精细辛算法》
因此,可得:
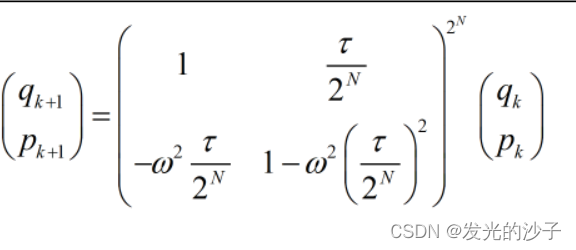
采用精细化算法可得:
4、RK算法、一阶辛精细化算法、辛RK算法、梯形法、解析法的matlab代码
%作者:Yang Zheng
%机构:东北电力大学
%内容:对Hamilton系统的求解。 设K=4,C=R=0,M=1,则为哈密尔顿方程。于是有:dq/dt=-p;dp/dt=-4q
% RK算法
tau=0.5;
time=1000;
q0=1;
q2=0.9801;
p0=0;
p2=-0.3973;
q=zeros(ceil(time/tau),1);
p=q;
n=1;
q(n)=q0;
p(n)=p0;
A=[1 -tau/6;2*tau/3 1];
while(n<ceil(time/tau))
B1=[q0+tau/6*(p0+2*p2);p0-2*tau/3*(q0+2*q2)];
qp1=A\B1;
q1=qp1(1);p1=qp1(2);
B2=[q2+tau/6*(p2+2*p1);p2-2*tau/3*(q2+2*q1)];
qp2=A\B2;
q2=qp2(1);p2=qp2(2);
%更新
q0=q1;
p0=p1;
%赋值
n=n+1;
q(n)=q0;
p(n)=p0;
end
plot(p,q,'r');
hold on;
% 辛1阶算法
N=10;%精细度
E=eye(2);
w=2;
B=[0 tau/2^N;-w^2*tau/2^N -w^2*(tau/2^N)^2];
%B=[w^2*(tau/2^N)^2 -w^2*tau/2^N;-tau/2^N 0];
for i = 1:N
B=B*B+2*B;
end
M=E+B;
n=1;
q0=1;
p0=0;
q(n)=q0;
p(n)=p0;
while(n<ceil(time/tau))
xqp=M*[q0 p0]';
q0=xqp(1);
p0=xqp(2);
q(n)=q0;
p(n)=p0;
n=n+1;
end
plot(p,q,'y');
hold on;
% 辛RK算法
g=w*tau;
J=1/(g^4+12*g^2+144)*[g^4-60*g^2+144 12*tau*(12-g^2);-12*g*w*(12-g^2) g^4-60*g^2+144];
n=1;
q0=1;
p0=0;
q(n)=q0;
p(n)=p0;
while(n<ceil(time/tau))
xqp=J*[q0 p0]';
q0=xqp(1);
p0=xqp(2);
q(n)=q0;
p(n)=p0;
n=n+1;
end
plot(p,q,'k');
hold on;
%梯形法
q0=1;
p0=0;
q=zeros(ceil(time/tau),1);
p=q;
n=1;
q(n)=q0;
p(n)=p0;
A=[1 -tau/2;2*tau 1];
while(n<ceil(time/tau))
B1=[q0+tau/2*p0;p0-2*tau*q0];
qp1=A\B1;
q1=qp1(1);p1=qp1(2);
%更新
q0=q1;
p0=p1;
%赋值
n=n+1;
q(n)=q0;
p(n)=p0;
end
plot(p,q,'g');
hold on;
% 原方程
T=1:tau:time;
plot(-2*sin(2*T),cos(2*T),'b');仿真结果:
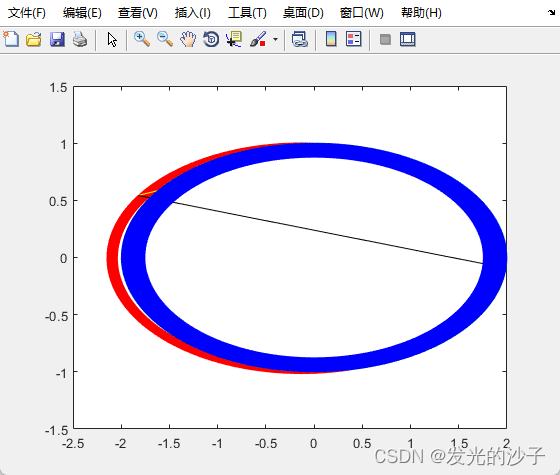
可以看到,RK法已经完全失真。
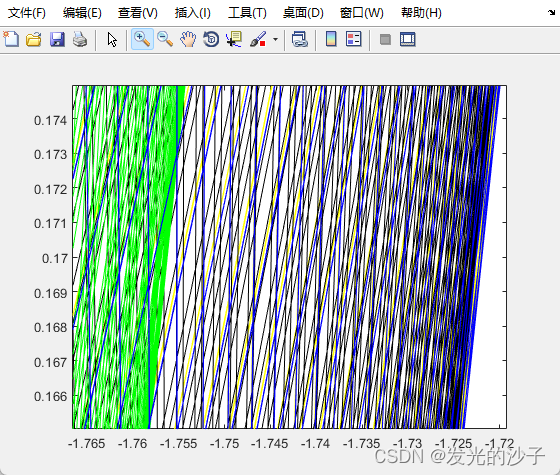
可以看到,梯形法没有长时追踪能力。一阶辛精度很高,可以追踪;辛RK没有精细化算法,但仍然可以追踪,较精细化算法误差较大。
5、基于辛RK算法的谐振子方程组求解代码
%作者:Yang Zheng
%机构:东北电力大学
%内容:对Hamilton系统的求解。 设K=[k1,k2,...,kn],C=R=0,M=1,则为哈密尔顿方程组。K=w^2
function [q,p,q_ref,p_ref]=mul_diff_SRK(K)
%% 辛RK
N=length(K);
w=sqrt(K);
tau=0.5;
time=1000;
g=w*tau;
J=zeros(2,2*N);
for i = 1 :N
J(:,2*i-1:2*i)=1/(g(i)^4+12*g(i)^2+144)*[g(i)^4-60*g(i)^2+144 12*tau*(12-g(i)^2);-12*g(i)*w(i)*(12-g(i)^2) g(i)^4-60*g(i)^2+144];
end
n=1;
q0=ones(1,N);
p0=zeros(1,N);
q=zeros(ceil(time/tau),N);
p=q;
q(n,:)=q0;
p(n,:)=p0;
while(n<ceil(time/tau))
for i = 1 :N
xqp=J(:,2*i-1:2*i)*[q0(i) p0(i)]';
q0(i)=xqp(1);
p0(i)=xqp(2);
end
q(n,:)=q0;
p(n,:)=p0;
n=n+1;
end
%% 画出原图
T=tau:tau:time;
q_ref=zeros(ceil(time/tau),N);
p_ref=zeros(ceil(time/tau),N);
for i = 1 :N
q_ref(:,i)=cos(w(i)*T);
p_ref(:,i)=-w(i)*sin(w(i)*T);
end
end6、辛RK的vivado仿真结果,需要代码请联系作者邮箱!