文章目录
- 前言
- P8868 [NOIP2022] 比赛
- CF1824D
- P9990/2020 ICPC EcFinal G
前言
一般解决普通的区间历史和,只需要定义辅助 c = h s − t ⋅ a c=hs-t\cdot a c=hs−t⋅a, h s hs hs是历史和, a a a是区间和, t t t是时间戳,维护 a , c a,c a,c数组的区间加即可
但是如果题目更复杂一点,就要设置不同的tag,考虑下放顺序和影响,非常费脑子
一种无脑的方法就是构造矩阵,如果单纯使用普通的矩阵乘法,那么总复杂度会多 C 3 C^3 C3,其中 C C C为向量长度
本文的目的就是优化矩阵乘法的过程,实际上就是对矩阵乘法循环展开,只不过个人认为能更优雅一点罢了
P8868 [NOIP2022] 比赛
题意给出 a , b a,b a,b两个数组,多次询问, [ L , R ] [L,R] [L,R]的所有子区间的 max a i ⋅ max b j \max a_i \cdot \max b_j maxai⋅maxbj,也就是求 ∑ L ≤ l ≤ r ≤ R max l ≤ i ≤ r a i ⋅ max l ≤ i ≤ r b i \sum_{L \leq l \leq r \leq R }\max_{l \leq i \leq r}a_i \cdot \max_{l \leq i \leq r} b_i L≤l≤r≤R∑l≤i≤rmaxai⋅l≤i≤rmaxbi
考虑对所有询问离线,从左到右扫一遍,维护以 i i i为右端点的答案,询问就是查询区间 max a ⋅ max b \max a \cdot \max b maxa⋅maxb的历史和
对 a , b a,b a,b分别维护两个单调栈即可用线段树更新
线段树每个节点维护 [ a , b , a b , c , l e n ] [a,b,ab,c,len] [a,b,ab,c,len]表示区间 a i a_i ai的和, b i b_i bi的和, a i b i a_ib_i aibi的和, a i b i a_ib_i aibi的历史和,区间长度
那么对于区间
a
a
a加
k
k
k,有
(
a
b
a
b
c
l
e
n
)
T
⋅
(
1
0
0
0
0
0
1
k
0
0
0
0
1
0
0
0
0
0
1
0
k
0
0
0
1
)
=
(
a
+
k
⋅
l
e
n
b
a
b
+
k
b
c
l
e
n
)
T
\begin{pmatrix} a\\b\\ab\\c\\len \end{pmatrix}^T\cdot \begin{pmatrix} 1&0&0&0&0\\ 0&1&k&0&0\\ 0&0&1&0&0\\ 0&0&0&1&0\\ k&0&0&0&1 \end{pmatrix}= \begin{pmatrix} a+k \cdot len\\b\\ab+kb\\c\\len \end{pmatrix}^T
ababclen
T⋅
1000k010000k1000001000001
=
a+k⋅lenbab+kbclen
T
同理,区间
b
b
b加
k
k
k,有
(
1
0
k
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
1
0
k
0
0
1
)
\begin{pmatrix} 1&0&k&0&0\\ 0&1&0&0&0\\ 0&0&1&0&0\\ 0&0&0&0&1\\ 0&k&0&0&1 \end{pmatrix}
100000100kk01000000000011
更新区间历史和
(
1
0
0
0
0
0
1
0
0
0
0
0
1
1
0
0
0
0
1
0
0
0
0
0
1
)
\begin{pmatrix} 1&0&0&0&0\\ 0&1&0&0&0\\ 0&0&1&1&0\\ 0&0&0&1&0\\ 0&0&0&0&1 \end{pmatrix}
1000001000001000011000001
虽然矩阵乘法是
5
3
5^3
53,但是可以发现很多状态是一直为
0
0
0,也就是没有用的,要想找到这些状态,我们只需要将所有矩阵初始不为0的状态设为1,跑一遍传递闭包,就可以知道所有状态,这里25个状态一共只有14个状态合法(实际上可以9个,主对角线恒为1)
然后我们可以打表来代替手写,打表代码如下
void solve(){
vector<vector<int>> f={
{1,0,1,0,0},
{0,1,1,0,0},
{0,0,1,1,0},
{0,0,0,1,0},
{1,1,0,0,1}
};
const int n=f.size();
for(int k=0;k<n;k++){
for(int i=0;i<n;i++){
for(int j=0;j<n;j++)f[i][j]|=f[i][k]&f[k][j];
}
}
string s="int ";
for(int i=0;i<n;i++){
for(int j=0;j<n;j++){
if(f[i][j])s+="x"+to_string(i)+to_string(j)+",";
}
}
s.pop_back();
s+=";\n";
s+="\n\nMatrix * Matrix:\n";
for(int i=0;i<n;i++){
for(int j=0;j<n;j++){
if(!f[i][j])continue;
s+="res.x"+to_string(i)+to_string(j)+"=";
for(int k=0;k<n;k++){
if(f[i][k]&f[k][j])s+="a.x"+to_string(i)+to_string(k)+"*b.x"+to_string(k)+to_string(j)+"+";
}
s.pop_back();
s+=";\n";
}
}
s+="\n\nVec * Matrix:\n";
for(int i=0;i<n;i++){
s+="res.x0"+to_string(i)+"=";
for(int j=0;j<n;j++){
if(f[j][i]){
s+="a.x0"+to_string(j)+"*b.x"+to_string(j)+to_string(i)+"+";
}
}
s.pop_back();
s+=";\n";
}
s.pop_back();
cout<<s;
}
/*
打印结果:
int x00,x02,x03,x11,x12,x13,x22,x23,x33,x40,x41,x42,x43,x44;
Matrix * Matrix:
res.x00=a.x00*b.x00;
res.x02=a.x00*b.x02+a.x02*b.x22;
res.x03=a.x00*b.x03+a.x02*b.x23+a.x03*b.x33;
res.x11=a.x11*b.x11;
res.x12=a.x11*b.x12+a.x12*b.x22;
res.x13=a.x11*b.x13+a.x12*b.x23+a.x13*b.x33;
res.x22=a.x22*b.x22;
res.x23=a.x22*b.x23+a.x23*b.x33;
res.x33=a.x33*b.x33;
res.x40=a.x40*b.x00+a.x44*b.x40;
res.x41=a.x41*b.x11+a.x44*b.x41;
res.x42=a.x40*b.x02+a.x41*b.x12+a.x42*b.x22+a.x44*b.x42;
res.x43=a.x40*b.x03+a.x41*b.x13+a.x42*b.x23+a.x43*b.x33+a.x44*b.x43;
res.x44=a.x44*b.x44;
Vec * Matrix:
res.x00=a.x00*b.x00+a.x04*b.x40;
res.x01=a.x01*b.x11+a.x04*b.x41;
res.x02=a.x00*b.x02+a.x01*b.x12+a.x02*b.x22+a.x04*b.x42;
res.x03=a.x00*b.x03+a.x01*b.x13+a.x02*b.x23+a.x03*b.x33+a.x04*b.x43;
res.x04=a.x04*b.x44;
*/
然后我们就可以利用打印结果,快速套上线段树板子
struct Matrix{
int x00,x02,x03,x11,x12,x13,x22,x23,x33,x40,x41,x42,x43,x44;
};
struct Vec{
int x00,x01,x02,x03,x04;
};
Matrix operator*(const Matrix &a,const Matrix &b){
Matrix res;
res.x00=a.x00*b.x00;
res.x02=a.x00*b.x02+a.x02*b.x22;
res.x03=a.x00*b.x03+a.x02*b.x23+a.x03*b.x33;
res.x11=a.x11*b.x11;
res.x12=a.x11*b.x12+a.x12*b.x22;
res.x13=a.x11*b.x13+a.x12*b.x23+a.x13*b.x33;
res.x22=a.x22*b.x22;
res.x23=a.x22*b.x23+a.x23*b.x33;
res.x33=a.x33*b.x33;
res.x40=a.x40*b.x00+a.x44*b.x40;
res.x41=a.x41*b.x11+a.x44*b.x41;
res.x42=a.x40*b.x02+a.x41*b.x12+a.x42*b.x22+a.x44*b.x42;
res.x43=a.x40*b.x03+a.x41*b.x13+a.x42*b.x23+a.x43*b.x33+a.x44*b.x43;
res.x44=a.x44*b.x44;
return res;
}
Vec operator * (const Vec &a,const Matrix &b){
Vec res;
res.x00=a.x00*b.x00+a.x04*b.x40;
res.x01=a.x01*b.x11+a.x04*b.x41;
res.x02=a.x00*b.x02+a.x01*b.x12+a.x02*b.x22+a.x04*b.x42;
res.x03=a.x00*b.x03+a.x01*b.x13+a.x02*b.x23+a.x03*b.x33+a.x04*b.x43;
res.x04=a.x04*b.x44;
return res;
}
Vec operator +(const Vec &a,const Vec &b){
return {
a.x00+b.x00,
a.x01+b.x01,
a.x02+b.x02,
a.x03+b.x03,
a.x04+b.x04
};
}
Matrix I={1,0,0,1,0,0,1,0,1,0,0,0,0,1};
Matrix C={1,0,0,1,0,0,1,1,1,0,0,0,0,1};
Matrix getA(int k){
return Matrix{1,0,0,1,k,0,1,0,1,k,0,0,0,1};
}
Matrix getB(int k){
return Matrix{1,k,0,1,0,0,1,0,1,0,k,0,0,1};
}
vector<int> a,b;
struct SegmentTree{
struct Node{
Vec v;
Matrix tag=I;
bool lazy=0;
};
vector<Node> t;
void init(int n){
t=vector<Node>(n<<2);
build(1,1,n);
}
void pushup(int p){
t[p].v=t[p<<1].v+t[p<<1|1].v;
}
void pushtag(int p,const Matrix &m){
t[p].v=t[p].v*m;
t[p].tag=t[p].tag*m;
t[p].lazy=1;
}
void pushdown(int p){
if(t[p].lazy){
pushtag(p<<1,t[p].tag);
pushtag(p<<1|1,t[p].tag);
t[p].lazy=0;
t[p].tag=I;
}
}
void build(int p,int l,int r){
if(l==r){
t[p].v={a[l],b[l],a[l]*b[l],0,1};
return;
}
int mid=l+r>>1;
build(p<<1,l,mid);
build(p<<1|1,mid+1,r);
pushup(p);
}
void modify(int p,int l,int r,int ql,int qr,const Matrix &x){
if(ql<=l&&r<=qr){
pushtag(p,x);
return;
}
pushdown(p);
int mid=l+r>>1;
if(ql<=mid)modify(p<<1,l,mid,ql,qr,x);
if(qr>mid)modify(p<<1|1,mid+1,r,ql,qr,x);
pushup(p);
}
int query(int p,int l,int r,int ql,int qr){
if(ql<=l&&r<=qr)return t[p].v.x03;
pushdown(p);
int res=0,mid=l+r>>1;
if(ql<=mid)res+=query(p<<1,l,mid,ql,qr);
if(qr>mid)res+=query(p<<1|1,mid+1,r,ql,qr);
return res;
}
} t;
void solve(){
int n,m;
cin>>m>>n;
vector<int> sta(n+1),stb(n+1);
a.assign(n+1,0);
b.assign(n+1,0);
for(int i=1;i<=n;i++)cin>>a[i];
for(int i=1;i<=n;i++)cin>>b[i];
t.init(n);
cin>>m;
vector<PII> Que[n+1];
for(int i=0;i<m;i++){
int l,r;
cin>>l>>r;
Que[r].emplace_back(l,i);
}
vector<int> ans(m);
int at=0,bt=0;
for(int i=1;i<=n;i++){
while(at&&a[sta[at]]<a[i]){
t.modify(1,1,n,sta[at-1]+1,sta[at],getA(a[i]-a[sta[at]]));
--at;
}sta[++at]=i;
while(bt&&b[stb[bt]]<b[i]){
t.modify(1,1,n,stb[bt-1]+1,stb[bt],getB(b[i]-b[stb[bt]]));
--bt;
}stb[++bt]=i;
t.modify(1,1,n,1,i,C);
for(auto [l,id]:Que[i]){
ans[id]=t.query(1,1,n,l,i);
}
}
for(int i=0;i<m;i++)cout<<ans[i]<<"\n";
}
这样就可以通过此题了,复杂度大概能快个10倍
CF1824D
首先一样的套路,离线从左到右扫,差分一下,即求
∑
i
=
l
r
∑
j
=
1
y
g
(
i
,
j
)
−
∑
i
=
l
x
−
1
g
(
i
,
j
)
\sum_{i=l}^r\sum_{j=1}^yg(i,j)-\sum_{i=l}^{x-1}g(i,j)
∑i=lr∑j=1yg(i,j)−∑i=lx−1g(i,j)
用一个set维护最后一个数出现的位置,那么 g ( i , j ) 就是 s e t 里面第一个大于等于 g(i,j)就是set里面第一个大于等于 g(i,j)就是set里面第一个大于等于i 的位置; 的位置; 的位置;对于一个 g ( i , j ) g(i,j) g(i,j),考虑哪些 i i i的贡献发生改变,手玩一下发现是一段区间覆盖,可以用区间加代替
那么区间加,区间历史和,就是套版子了
维护向量
[
s
u
m
,
h
i
s
,
l
e
n
]
[sum,his,len]
[sum,his,len]表示和,历史和,长度
区间加矩阵:
(
1
0
0
0
1
0
k
0
1
)
\begin{pmatrix} 1&0&0\\ 0&1&0\\ k&0&1 \end{pmatrix}
10k010001
更新矩阵
(
1
1
0
0
1
0
1
0
1
)
\begin{pmatrix} 1&1&0\\ 0&1&0\\ 1&0&1 \end{pmatrix}
101110001
打表简化常数,最终发现只需要维护6个变量
按照之前的步骤写,不需要手动卡常也能过
struct Matrix{
int x00,x01,x11,x20,x21,x22;
};
struct Vec{
int x00,x01,x02;
};
Matrix operator*(const Matrix &a,const Matrix &b){
Matrix res;
res.x00=a.x00*b.x00;
res.x01=a.x00*b.x01+a.x01*b.x11;
res.x11=a.x11*b.x11;
res.x20=a.x20*b.x00+a.x22*b.x20;
res.x21=a.x20*b.x01+a.x21*b.x11+a.x22*b.x21;
res.x22=a.x22*b.x22;
return res;
}
Vec operator * (const Vec &a,const Matrix &b){
Vec res;
res.x00=a.x00*b.x00+a.x02*b.x20;
res.x01=a.x00*b.x01+a.x01*b.x11+a.x02*b.x21;
res.x02=a.x02*b.x22;
return res;
}
Vec operator +(const Vec &a,const Vec &b){
return {
a.x00+b.x00,
a.x01+b.x01,
a.x02+b.x02,
};
}
Matrix I={1,0,1,0,0,1};
Matrix C={1,1,1,0,0,1};
Matrix getA(int k){
return Matrix{1,0,1,k,0,1};
}
vector<int> a,b;
struct SegmentTree{
struct Node{
Vec v;
Matrix tag=I;
bool lazy=0;
};
vector<Node> t;
void init(int n){
t=vector<Node>(n<<2);
build(1,1,n);
}
void pushup(int p){
t[p].v=t[p<<1].v+t[p<<1|1].v;
}
void pushtag(int p,const Matrix &m){
t[p].v=t[p].v*m;
t[p].tag=t[p].tag*m;
t[p].lazy=1;
}
void pushdown(int p){
if(t[p].lazy){
pushtag(p<<1,t[p].tag);
pushtag(p<<1|1,t[p].tag);
t[p].lazy=0;
t[p].tag=I;
}
}
void build(int p,int l,int r){
if(l==r){
t[p].v={0,0,1};
return;
}
int mid=l+r>>1;
build(p<<1,l,mid);
build(p<<1|1,mid+1,r);
pushup(p);
}
void modify(int p,int l,int r,int ql,int qr,const Matrix &x){
if(ql<=l&&r<=qr){
pushtag(p,x);
return;
}
pushdown(p);
int mid=l+r>>1;
if(ql<=mid)modify(p<<1,l,mid,ql,qr,x);
if(qr>mid)modify(p<<1|1,mid+1,r,ql,qr,x);
pushup(p);
}
int query(int p,int l,int r,int ql,int qr){
if(ql<=l&&r<=qr)return t[p].v.x01;
pushdown(p);
int res=0,mid=l+r>>1;
if(ql<=mid)res+=query(p<<1,l,mid,ql,qr);
if(qr>mid)res+=query(p<<1|1,mid+1,r,ql,qr);
return res;
}
} t;
void solve(){
int n,q;
cin>>n>>q;
vector<int> a(n+1);
for(int i=1;i<=n;i++)cin>>a[i];
vector<int> ans(q);
vector<array<int,4>> Que[n+1];
for(int i=0;i<q;i++){
int l,r,L,R;
cin>>l>>r>>L>>R;
Que[R].push_back({l,r,i,1});
Que[L-1].push_back({l,r,i,-1});
}
t.init(n);
set<int> s={0};
vector<int> pre(n+1);
for(int i=1;i<=n;i++){
if(pre[a[i]]){
auto j=s.lower_bound(pre[a[i]]);
int l=*prev(j)+1,r=*j;
int v=(next(j)==s.end())?i-*j:*next(j)-*j;
// cout<<l<<" "<<r<<" "<<v<<"\n";
t.modify(1,1,n,l,r,getA(v));
s.erase(j);
}
t.modify(1,1,n,i,i,getA(i));
pre[a[i]]=i;
s.insert(i);
t.modify(1,1,n,1,i,C);
for(auto [l,r,id,op]:Que[i]){
r=min(r,i);
ans[id]+=op*t.query(1,1,n,l,r);
}
}
for(int i=0;i<q;i++)cout<<ans[i]<<"\n";
}
P9990/2020 ICPC EcFinal G
#include<bits/stdc++.h>
#define N 1000005
#define rd read()
#define int long long
using namespace std;
int n,m,p[N],a[N],ans[N],t,l,r,op,las[N];
vector<pair<int,int> >q[N];
stack<int>s;
inline int read()
{
int x=0,f=1;
char ch=getchar();
while(ch<'0'||ch>'9')
{
if(ch=='-')
f=-1;
ch=getchar();
}
while(ch>='0' && ch<='9')
x=x*10+ch-'0',ch=getchar();
return x*f;
}
struct ver{
int x11,x21,x31;
ver operator + (const ver &o){return {x11+o.x11,x21+o.x21,x31+o.x31};}
}tr[N<<2];
struct mat{
int x11,x12;
int x21,x22;
int x31,x32;
mat operator * (const mat &o){
mat res;
res.x11=x11*o.x11+x12*o.x21;
res.x12=x11*o.x12+x12*o.x22;
res.x21=x21*o.x11+x22*o.x21;
res.x22=x21*o.x12+x22*o.x22;
res.x31=x31*o.x11+x32*o.x21+o.x31;
res.x32=x31*o.x12+x32*o.x22+o.x32;
return res;
}
ver operator * (const ver &o){return {x11*o.x11+x12*o.x21,x21*o.x11+x22*o.x21,x31*o.x11+x32*o.x21+o.x31};}
}tag[N<<2];
inline void pushup(int k){tr[k]=tr[k<<1]+tr[k<<1|1];}
inline void build(int k,int l,int r){
tag[k]={1,0,0,1,0,0};
if(l==r){return tr[k].x21=1,void();}
int mid=l+r>>1;
build(k<<1,l,mid);build(k<<1|1,mid+1,r);
pushup(k);
}
inline void add(int k,mat v){
tag[k]=v*tag[k];
tr[k]=v*tr[k];
}
inline void pushdown(int k){
add(k<<1,tag[k]);
add(k<<1|1,tag[k]);
tag[k]={1,0,0,1,0,0};
}
inline void modify(int k,int l,int r,int x,int y,mat v){
if(x<=l&&r<=y){return add(k,v),void();}
int mid=l+r>>1;
pushdown(k);
if(x<=mid) modify(k<<1,l,mid,x,y,v);
if(y>mid) modify(k<<1|1,mid+1,r,x,y,v);
pushup(k);
}
inline ver query(int k,int l,int r,int x,int y){
if(x<=l&&r<=y){return tr[k];}
int mid=l+r>>1;
ver res={0,0,0};
pushdown(k);
if(x<=mid) res=res+query(k<<1,l,mid,x,y);
if(y>mid) res=res+query(k<<1|1,mid+1,r,x,y);
return res;
}
signed main(){
n=rd;
build(1,1,n);
for(int i=1;i<=n;i++) a[i]=rd;
m=rd;
for(int i=1;i<=m;i++) l=rd,r=rd,q[r].push_back({i,l});
for(int i=1;i<=n;i++){
modify(1,1,n,las[a[i]]+1,i,{0,1,1,0,0,0});modify(1,1,n,1,n,{1,0,0,1,1,0});
las[a[i]]=i;
for(auto [id,l]:q[i]) ans[id]=query(1,1,n,l,i).x31;
}
for(int i=1;i<=m;i++) cout<<ans[i]<<'\n';
return 0;
}
拿CF ECFinal的数据测试
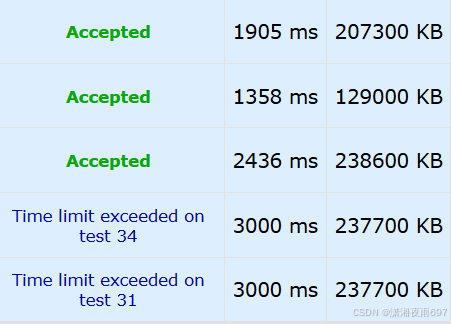
从上到下分别是改良后的矩阵乘法(即本文章使用的),多重标记,矩阵乘法未减少状态,以及两个普通矩阵乘法
可以看到优化还是很明显的,比赛的时候时间充足找不到打多重标记的做法可以使用,优点就是非常套路,缺点就是代码量会大一点,并且非常难调(几个初始矩阵一定要用对)