看到最近好玩的开源项目比较多,就想要学习一下esp32的开发,目前使用比较多的ide基本上是arduino、esp-idf和platformio,前者编译比较慢,后两者看到开源大佬的项目做的比较多,所以主要学习后两者。
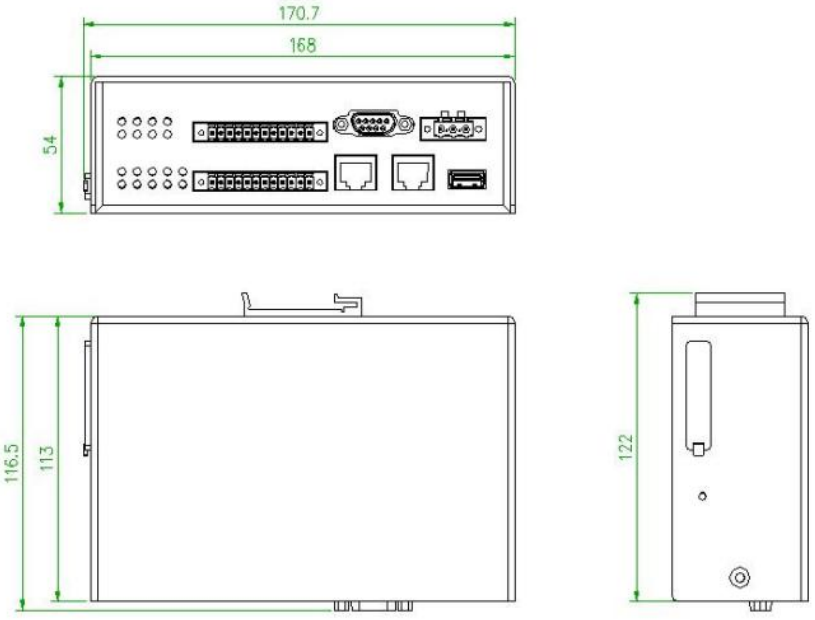
本次使用的硬件是GOOUUU ESP32-S3-CAM,开发环境是espidf的5.4.1版本。
一:首先是环境配置
esp-idf和pio的环境都需要配置编译链,才能够更好的编译,我是在vscode里下载插件后,再去搭建好环境的,而由于espressif官方的库和依赖都在github上,所以在配环境上多少会遇到一些问题,大家可以自行去搜索环境配置,如果实在是解决不了的话,这里也给自己打一个小广告,咸鱼搜索flushddd,可以粉丝价帮助大家配置环境哈。
二:进入正题,本文从点灯开始,一步步深入到本文的最终目标
1.首先是放出最终的实验现象
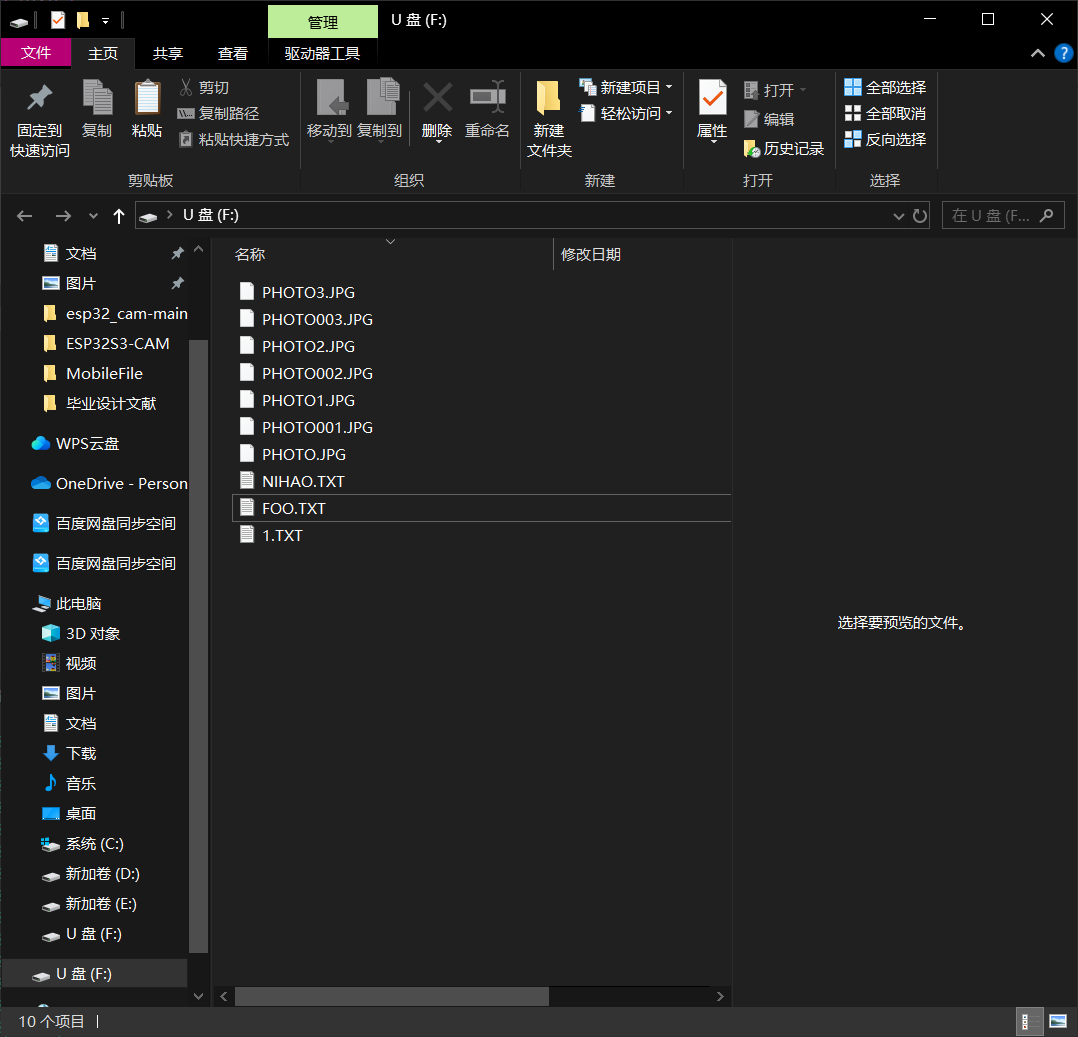
最后的实验现象会在sd中找到我们拍到的照片,通过espidf的终端监视也可以看到拍摄到的图片被保存的信息。
三:首先开始点灯
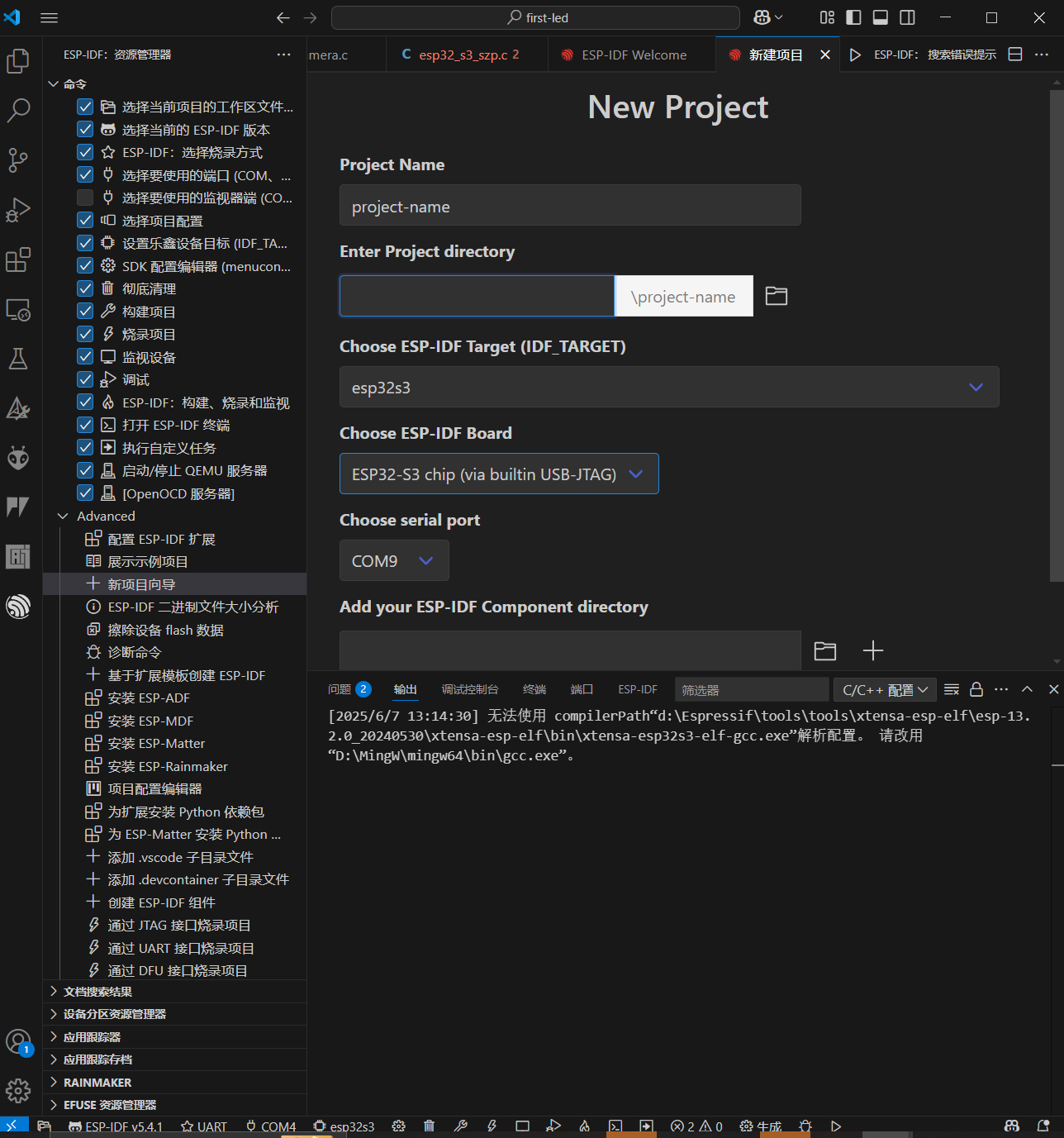
首先是创建工程,通过idf的向导创建工程,我选择的框架是5.3.2的,虽然框架是5.3.2但是5.4.1的编译器也可以编译前者框架的代码,填写工程名称,地址,选择芯片目标,最后是选择基础框架,这里我们选择idf的sample-project
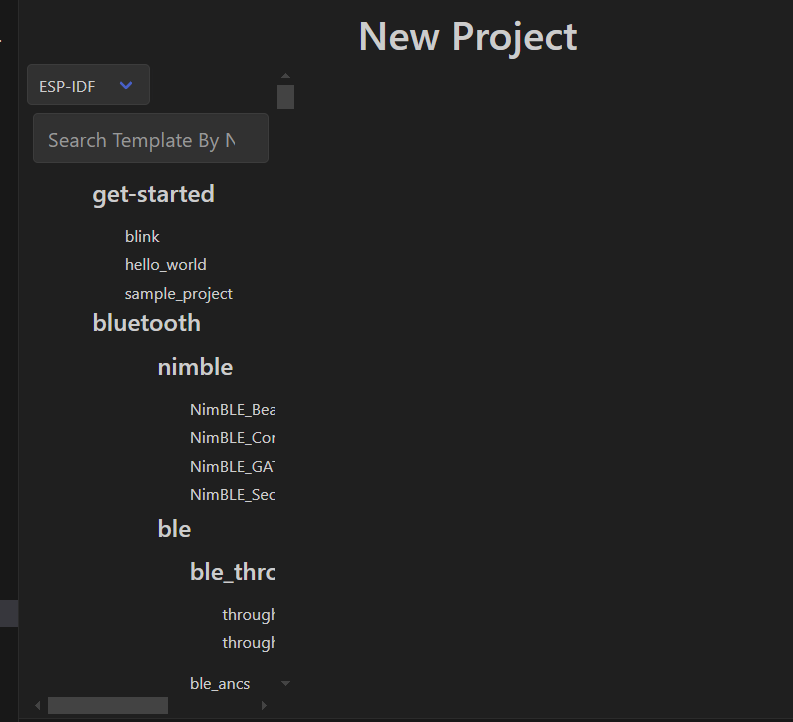
就是一个全新的工程,没有任何一个component的状态,只有main.c一个文件
开始点灯!
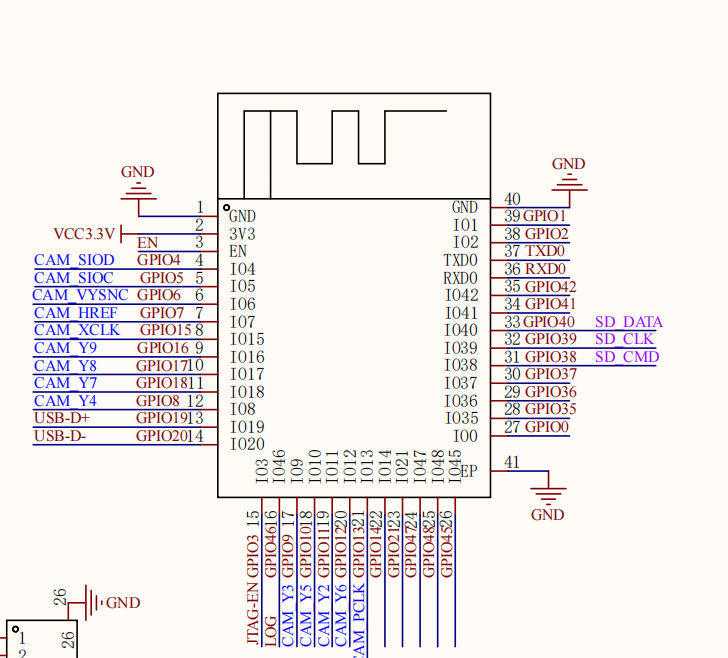
这里我们先看一下原理图,这里的led引脚是gpio43,记住这个数字,后面会用到。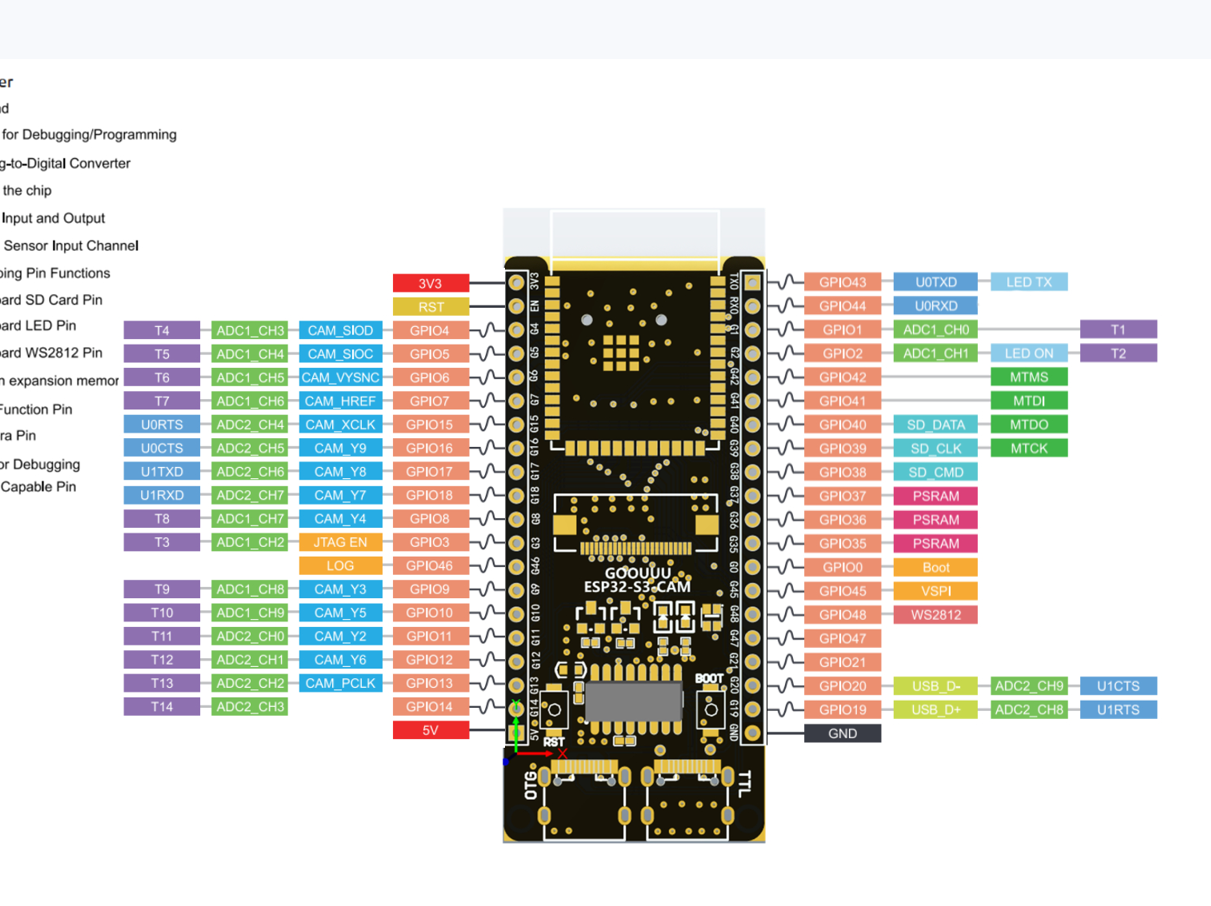
如同stm32开发,想要编辑gpio口,也是要初始化一个结构体,创建代码led.c和led.h具体代码如下:
void led_init(void)
{
gpio_config_t led_pin_config;//定义结构体
led_pin_config.pin_bit_mask = 1<<LED_PIN;
led_pin_config.mode = GPIO_MODE_OUTPUT;
led_pin_config.pull_up_en = GPIO_PULLUP_DISABLE;
led_pin_config.pull_down_en = GPIO_PULLDOWN_DISABLE;
led_pin_config.intr_type=GPIO_INTR_DISABLE;
gpio_config(&led_pin_config);
}
上述为初始化代码,添加到led.c中,并且需要宏定义LED_PIN,并且添加到.h文件中。
#define LED_PIN 43
然后是控制LED的亮灭,以下就是控制LED亮灭的代码。
void led_on(void)
{
gpio_set_level(LED_PIN, 0);
}
void led_off(void)
{
gpio_set_level(LED_PIN, 1);
}和led.h的代码
#ifndef __LED_H
#define __LED_H
#include "driver/gpio.h"
#define LED_PIN 43
void led_init(void);
void led_on(void);
void led_off(void);
#endif
做完这些后,就需要创建frertos的任务,由于espidf是使用frertos进行开发的,所以在这里我们也使用任务来点灯,当然了,在main里while循环也是可以的。
void led_blink_task(void * param)
{
while(1)
{
led_on();
vTaskDelay(pdMS_TO_TICKS(500));
led_off();
vTaskDelay(pdMS_TO_TICKS(500));
}
}
void app_main(void)
{
led_init();
xTaskCreatePinnedToCore(led_blink_task,"led",4096,NULL,3,NULL,1);
}以上代码就是在main.c中的 全部代码,然后点击编译和烧录,没有意外的话就会看到板子上的蓝色小灯以0.5s为间隔在一闪一闪。
2.点灯实现了之后,接下来需要实现的是SD的读取和文件系统的挂载。
通过原理图我们可知,我们的sd卡是一个单线的,数据线只通过一个data信号线即可读取,然后是SD_CMD和SD_CLK两根线,即可完成sd卡的控制。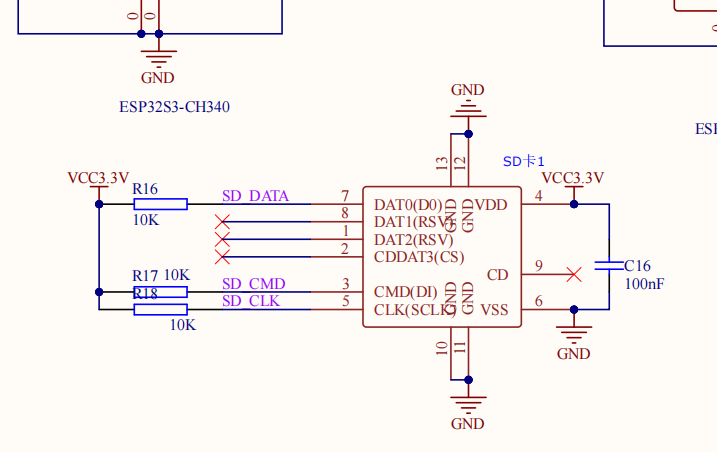
具体初始化代码如下:
sdmmc_slot_config_t slot_config = SDMMC_SLOT_CONFIG_DEFAULT();
slot_config.width=1;
slot_config.clk=SD_PIN_CLK;
slot_config.cmd=SD_PIN_CMD;
slot_config.d0=SD_PIN_D0;
slot_config.flags |= SDMMC_SLOT_FLAG_INTERNAL_PULLUP;
在这里面我们需要做的就是定义好引脚,通过引脚分配图我们可知,cmd是gpio38,clk是39以及Data是40,这里记得去完成一个宏定义即可。
除此之外,还需要做的是挂载文件系统,初始化代码如下:
esp_vfs_fat_sdmmc_mount_config_t mount_config ={
.format_if_mount_failed = false,
.max_files=5,
.allocation_unit_size=16*1024,
};具体含义为,操作的最大文件数是5,分配的文件大小为16*1024字节,也就是16kb,
综上所述,完成初始化sd卡和挂载文件系统代码如下
esp_vfs_fat_sdmmc_mount_config_t mount_config ={
.format_if_mount_failed = false,
.max_files=5,
.allocation_unit_size=16*1024,
};
sdmmc_card_t *card;
const char mount_point[] = MOUNT_POINT;
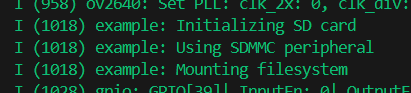
ESP_LOGI(TAG, "Initializing SD card");
ESP_LOGI(TAG, "Using SDMMC peripheral");
sdmmc_host_t host = SDMMC_HOST_DEFAULT();
sdmmc_slot_config_t slot_config = SDMMC_SLOT_CONFIG_DEFAULT();
slot_config.width=1;
slot_config.clk=SD_PIN_CLK;
slot_config.cmd=SD_PIN_CMD;
slot_config.d0=SD_PIN_D0;
slot_config.flags |= SDMMC_SLOT_FLAG_INTERNAL_PULLUP;
ESP_LOGI(TAG, "Mounting filesystem");
ret = esp_vfs_fat_sdmmc_mount(mount_point, &host, &slot_config, &mount_config, &card);
if (ret != ESP_OK) {
if (ret == ESP_FAIL) {
ESP_LOGE(TAG, "Failed to mount filesystem. "
"If you want the card to be formatted, set the EXAMPLE_FORMAT_IF_MOUNT_FAILED menuconfig option.");
} else {
ESP_LOGE(TAG, "Failed to initialize the card (%s). "
"Make sure SD card lines have pull-up resistors in place.", esp_err_to_name(ret));
}
return;
}
ESP_LOGI(TAG, "Filesystem mounted");
sdmmc_card_print_info(stdout, card);最后初始化完成了之后,会提示Filesystem mounted,如图所示。
在这里面我们也可以写一个测试代码,写入一个helloword.txt
esp_err_t s_example_write_file(const char *path, char *data)
{
ESP_LOGI(TAG, "Opening file %s", path);
FILE *f = fopen(path, "w");
if (f == NULL) {
ESP_LOGE(TAG, "Failed to open file for writing");
return ESP_FAIL;
}
fprintf(f, data);
fclose(f);
ESP_LOGI(TAG, "File written");
return ESP_OK;
}
const char *file_hello = MOUNT_POINT"/hello1.txt";
char data[EXAMPLE_MAX_CHAR_SIZE];
snprintf(data, EXAMPLE_MAX_CHAR_SIZE, "%s %s!\n", "HelloWorld", card->cid.name);
ret = s_example_write_file(file_hello, data);
if (ret != ESP_OK) {
return;
}加入到app_main()函数里,编译烧录后,可以看到sd卡中出现了helloword.txt,具体内容为 helloword +你自己sd卡的名字。
3.最后,也就是camera
这里面我们需要把三者融合在一起,首先还是相机的初始化,这里先看原理图,我们这次使用的是OV2640型号的摄像头,camera的初始化一共需要14个引脚,其中有8根数据线,其余6根是信号线,然后在初始化之前,我们要打开esp32s3的psram,相机需要psram分配内存,将拍摄到的一帧图片存到psram中去。
这里我们先点开设置图样,或者通过espidf的cmd,定位到你创建工程的文件夹目录,通过命令
idf.py menuconfig也是可行的。
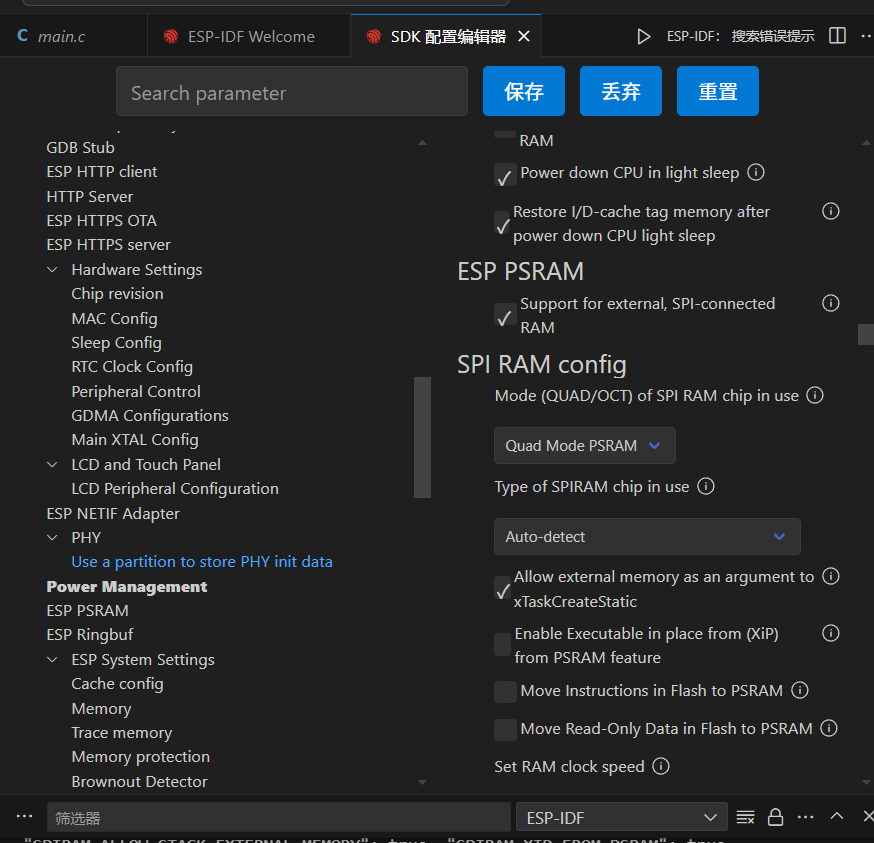 在menuconfig里面找到ESP PSRAM并打开,勾选support for external ,SPI -connected RAM,spiram的模式就选择 quad,如果自己的板子后面在调试监视的时候报错,就更换成另外一种模式,自动检测使用SPIRAM类型,设置RAM的时钟速度为80MHZ,并且勾选Initialize SPI RAM during startup,这样就可以在初始化的过程中自己识别PSRAM的芯片类型并且在监视中显示出来了,这一步是初始化camera的关键,然后记得保存。
在menuconfig里面找到ESP PSRAM并打开,勾选support for external ,SPI -connected RAM,spiram的模式就选择 quad,如果自己的板子后面在调试监视的时候报错,就更换成另外一种模式,自动检测使用SPIRAM类型,设置RAM的时钟速度为80MHZ,并且勾选Initialize SPI RAM during startup,这样就可以在初始化的过程中自己识别PSRAM的芯片类型并且在监视中显示出来了,这一步是初始化camera的关键,然后记得保存。
然后还有关键的一步,需要给现有的工程添加esp_camera的依赖库
通过idf的终端,输入指令:
idf.py add-dependency "espressif/esp32-camera"即可在现有工程中添加相机库的依赖,引用esp_camera.h
这里面为了确保psram确实已经得到了初始化,我们添加如下代码,显示如下:
// 检测 PSRAM 存在性和大小
if(esp_psram_get_size() == 0) {
ESP_LOGE("BOOT", "PSRAM NOT DETECTED! Check hardware connection.");
vTaskDelay(pdMS_TO_TICKS(1000));
esp_restart(); // 自动重启
}
ESP_LOGI("BOOT", "PSRAM Size: %d KB", esp_psram_get_size() / 1024);
// 初始化 PSRAM 缓存
esp_psram_init();
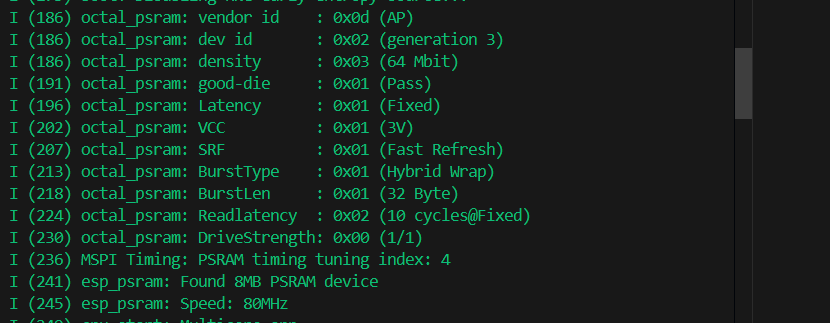
![]()
和芯片型号esp32s3n16r8一致,r8即代表PSRAM为8MB,
接下来就是camera的初始化,通过原理图中的引脚进行配置,一定不要把引脚输错了,代码如下:
void bsp_camera_init(void)
{
camera_config_t cam_config = {
.pin_pwdn = CAM_PIN_PWDN,
.pin_reset = CAM_PIN_RESET,
.pin_xclk = CAM_PIN_XCLK,
.pin_sccb_scl = CAM_PIN_SIOC,
.pin_sccb_sda = CAM_PIN_SIOD,
.pin_d7=CAM_PIN_D7,
.pin_d6=CAM_PIN_D6,
.pin_d5=CAM_PIN_D5,
.pin_d4=CAM_PIN_D4,
.pin_d3=CAM_PIN_D3,
.pin_d2=CAM_PIN_D2,
.pin_d1=CAM_PIN_D1,
.pin_d0=CAM_PIN_D0,
.pin_vsync=CAM_PIN_VYSNC,
.pin_href=CAM_PIN_HREF,
.pin_pclk=CAM_PIN_PCLK,
.ledc_timer = LEDC_TIMER_1,
.ledc_channel = LEDC_CHANNEL_1,
.xclk_freq_hz=10000000,
.pixel_format = PIXFORMAT_JPEG,
.frame_size = FRAMESIZE_QVGA,
.jpeg_quality = 10,
.fb_count = 2,
.fb_location = CAMERA_FB_IN_PSRAM,
.grab_mode = CAMERA_GRAB_WHEN_EMPTY,
.sccb_i2c_port = 1,
};
esp_err_t err = esp_camera_init(&cam_config);
if (err != ESP_OK)
{
ESP_LOGI(TAG,"Camera init failed with error 0x%x", err);
}
// 详细错误处理
}这里的初始化还需要注意一些参数分别是:.ledc_timer = LEDC_TIMER_1,
.ledc_channel = LEDC_CHANNEL_1,
.xclk_freq_hz=10000000,
.pixel_format = PIXFORMAT_JPEG,
.frame_size = FRAMESIZE_QVGA,
.jpeg_quality = 10,
.fb_count = 2,
分别指的是使用时钟的通道,camera的时钟频率,拍摄照片的分辨率是frame_size,照片的质量以及rgb格式等等,具体可以自己设置,最后完成初始化
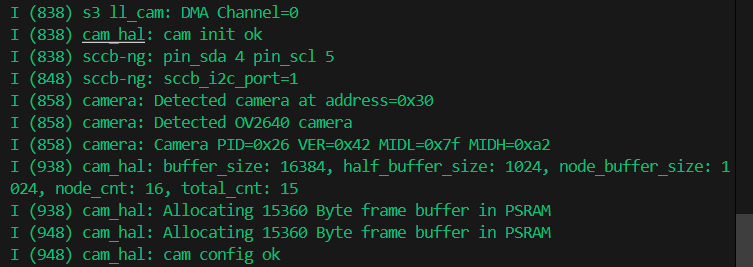
在app_main进行初始化,初始化完成后,如果正确配置了这些参数, 通过监视器可以看到camera的一些信息,如图所示
做完这些后,我们就可以将前面的三者加起来,首先是初始化led作为测试用,然后是初始胡sd卡和相机,最后是拍照的代码,代码如下:
static uint32_t get_max_file_number(void)
{
DIR *dir = opendir("/sdcard");
if (!dir)
{
ESP_LOGE(TAG, "Failed to open directory");
return 0;
}
uint32_t max_number = 0;
struct dirent *entry;
while ((entry = readdir(dir)) != NULL)
{
ESP_LOGI(TAG, "Processing file: %s", entry->d_name);
// 检查文件名长度
size_t name_len = strlen(entry->d_name);
if (name_len != 12)
{ // 改为12,因为PHOTO000.JPG是12个字符
ESP_LOGD(TAG, "Skipping file with wrong length: %s (%d)", entry->d_name, name_len);
continue;
}
// 检查前缀
if (memcmp(entry->d_name, "PHOTO", 5) != 0)
{
ESP_LOGD(TAG, "Skipping file without PHOTO prefix: %s", entry->d_name);
continue;
}
// 检查扩展名
if (memcmp(entry->d_name + 8, ".JPG", 4) != 0)
{
ESP_LOGD(TAG, "Skipping non-JPG file: %s", entry->d_name);
continue;
}
// 提取数字部分
char num_str[4] = {0};
memcpy(num_str, entry->d_name + 5, 3);
uint32_t current_number;
if (sscanf(num_str, "%lu", ¤t_number) == 1)
{
ESP_LOGI(TAG, "Found valid photo number: %lu from file %s", current_number, entry->d_name);
if (current_number > max_number)
{
max_number = current_number;
ESP_LOGI(TAG, "New maximum number: %lu", max_number);
}
}
else
{
ESP_LOGW(TAG, "Failed to parse number from: %s", num_str);
}
}
closedir(dir);
ESP_LOGI(TAG, "Final maximum file number found: %lu", max_number);
return max_number;
}
void camera_capture()
{
char filename[32]; // 文件名缓冲区
camera_fb_t *fb = esp_camera_fb_get();
static uint32_t file_number = 0; // 文件编号
// 获取SD卡中最大的文件编号
file_number = get_max_file_number() + 1;
ESP_LOGI(TAG, "Starting file number: %lu", file_number);
if (!fb) {
ESP_LOGE("CAM", "Failed to capture image");
} else {
ESP_LOGI("CAM", "Image captured: %d bytes", fb->len);
if(fb)
{
snprintf(filename, sizeof(filename), "/sdcard/PHOTO%03lu.JPG",file_number++);
{
// 分配JPEG缓冲区
uint8_t *jpeg_buf = NULL;
size_t jpeg_len = 0;
// 将frame转换为JPEG
bool converted = frame2jpg(fb, // 输入frame
92, // JPEG质量(0-100)
&jpeg_buf, // 输出JPEG缓冲区
&jpeg_len); // 输出JPEG长度
if (!converted)
{
ESP_LOGE(TAG, "JPEG conversion failed");
esp_camera_fb_return(fb);
}
else
{
FILE *file = fopen(filename, "wb");
if (file)
{
size_t written = fwrite(jpeg_buf, 1, jpeg_len, file);
fclose(file);
if (written == jpeg_len)
{
ESP_LOGI(TAG, "Saved %s (%d bytes)", filename, jpeg_len);
}
else
{
ESP_LOGE(TAG, "File write failed: %d/%d bytes", written, jpeg_len);
}
// 清理资源
free(jpeg_buf); // 释放JPEG缓冲区
esp_camera_fb_return(fb); // 返回帧缓冲区
}
}
}
}
esp_camera_fb_return(fb);
}
}
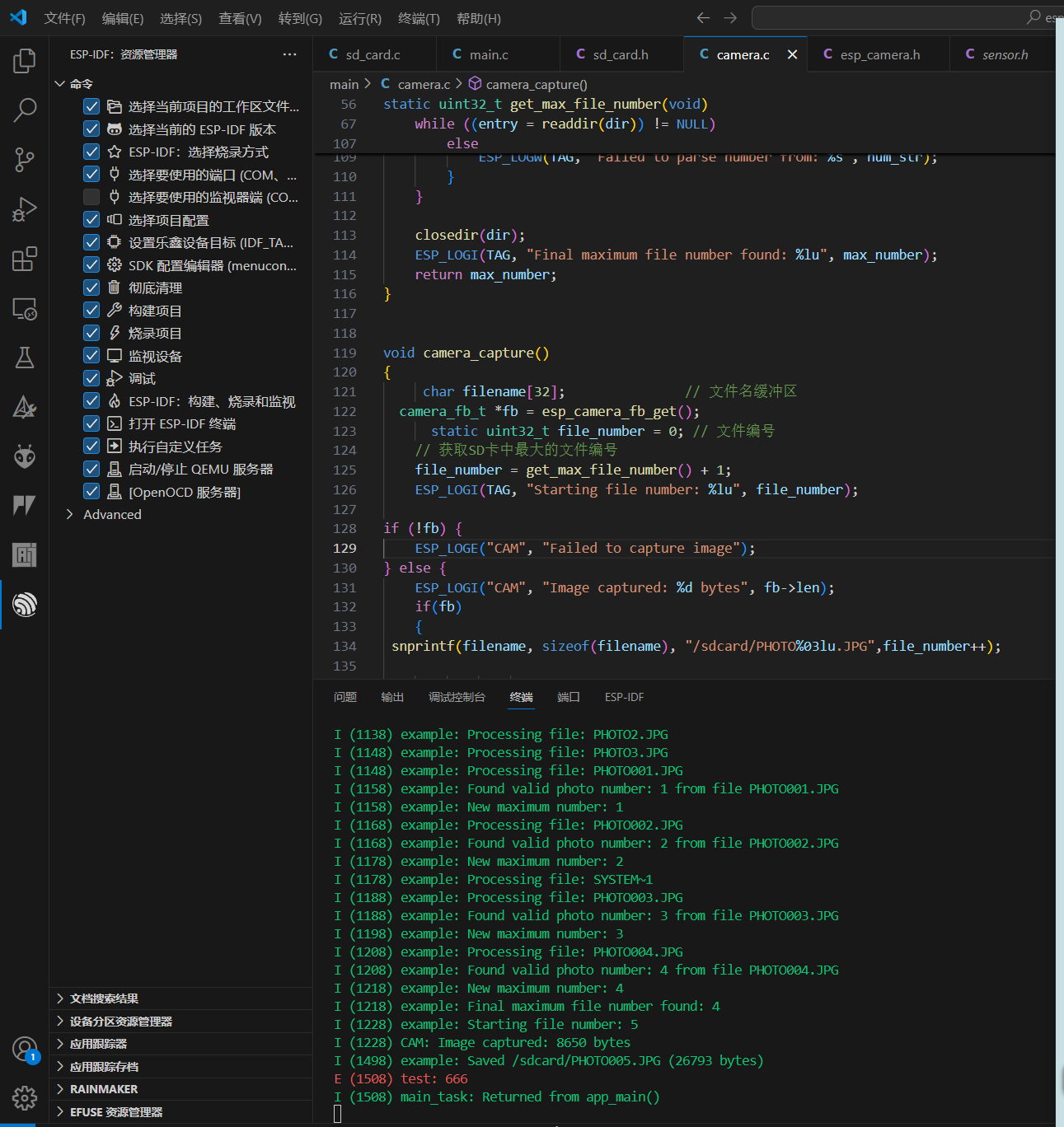
上述代码实现了首先查找sd卡中的文件数量,然后添加照片的命名,拍摄到图片后将其转成jpeg的格式,当将照片添加到sd卡中后,最后释放内存。其中拍照是通过函数esp_camera_fb_get();实现的,可惜的是板子没有可以使用的按键,否则检测按键,我们可以通过按按键来实现拍照。
最后将每个函数依次实现,编译烧录就大功告成了!
你可以看到自己拍摄到的图片出现在sd卡中了!
全部的工程如下:
通过网盘分享的文件:esp32-s3-cam
链接: https://pan.baidu.com/s/1MWgmBimOhGoUzEfFXVIDTQ?pwd=came 提取码: came
--来自百度网盘超级会员v4的分享