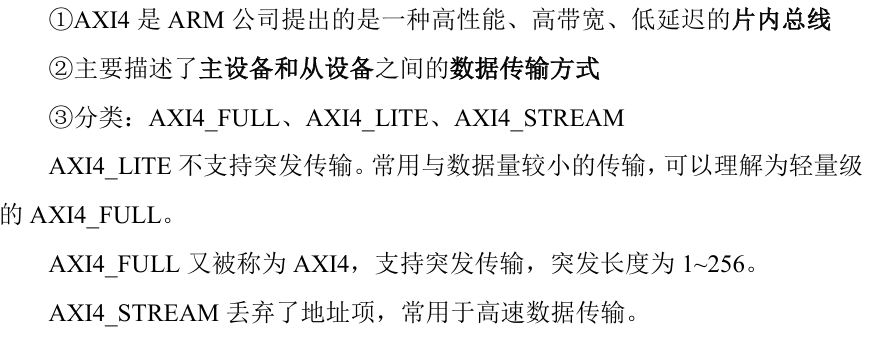
一、AXI 相关知识介绍
https://download.csdn.net/download/mvpkuku/90841873 AXI_LITE
选出部分重点,详细文档见上面链接。
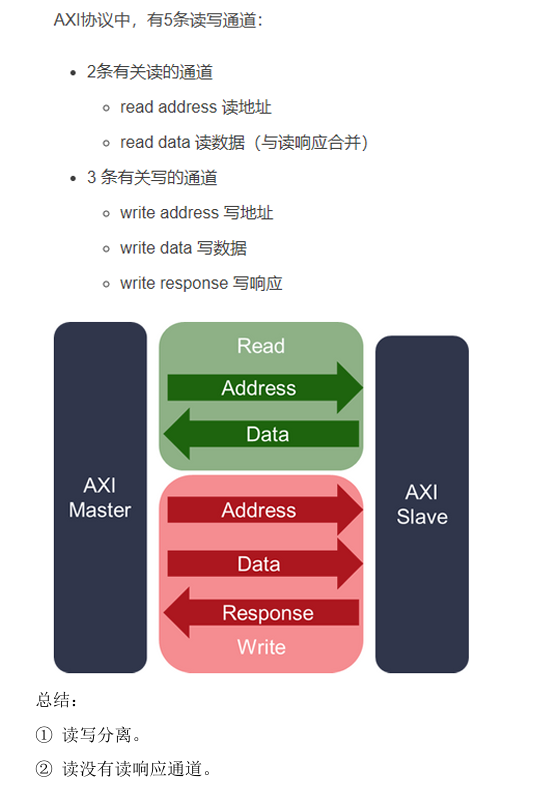
1.AXI4 协议类型

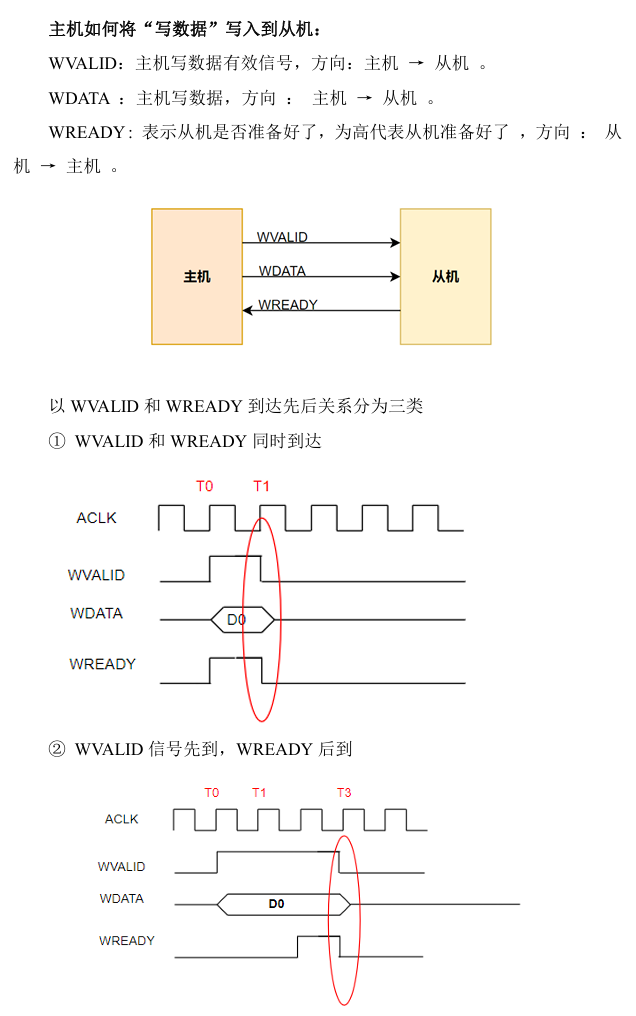
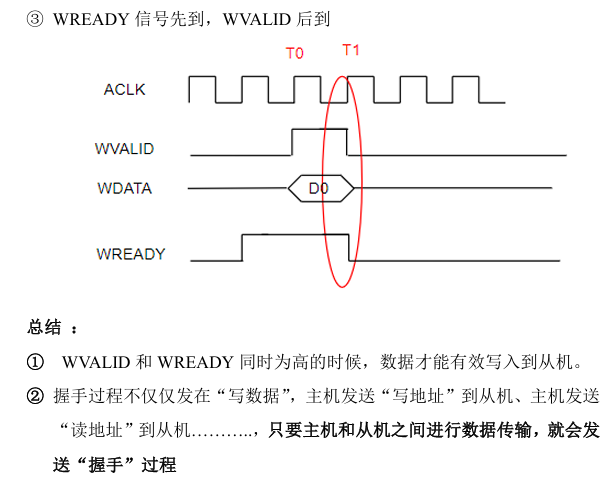
2.握手机制
二、AXI_LITE 协议的实现
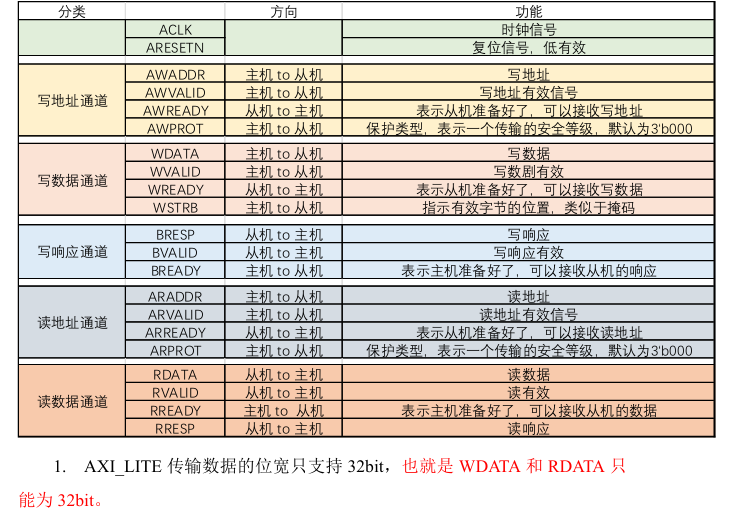
1. AXI_LITE 通道及各通道端口功能介绍
2.实现思路及框架
2.1 总体框架
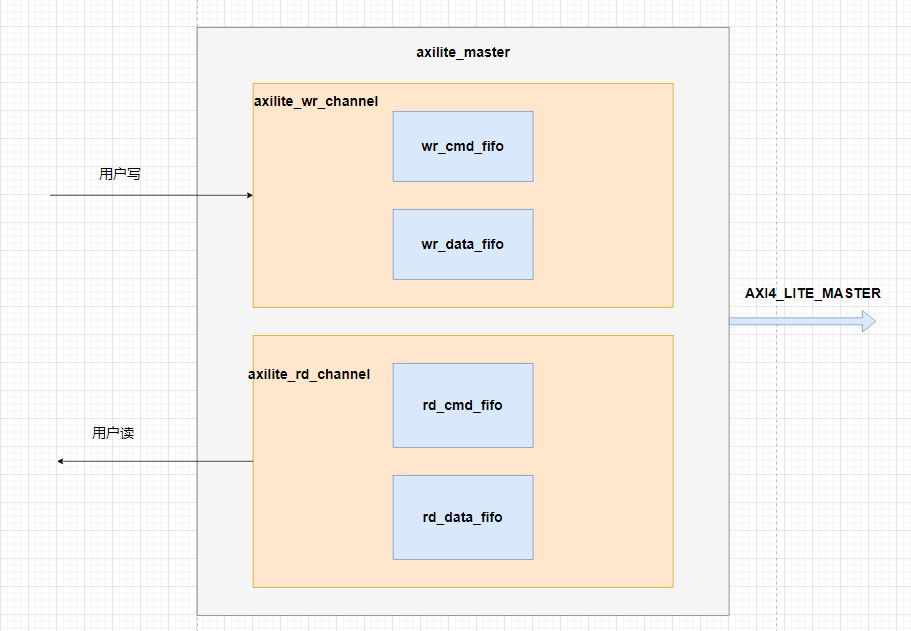
2.2 写通道
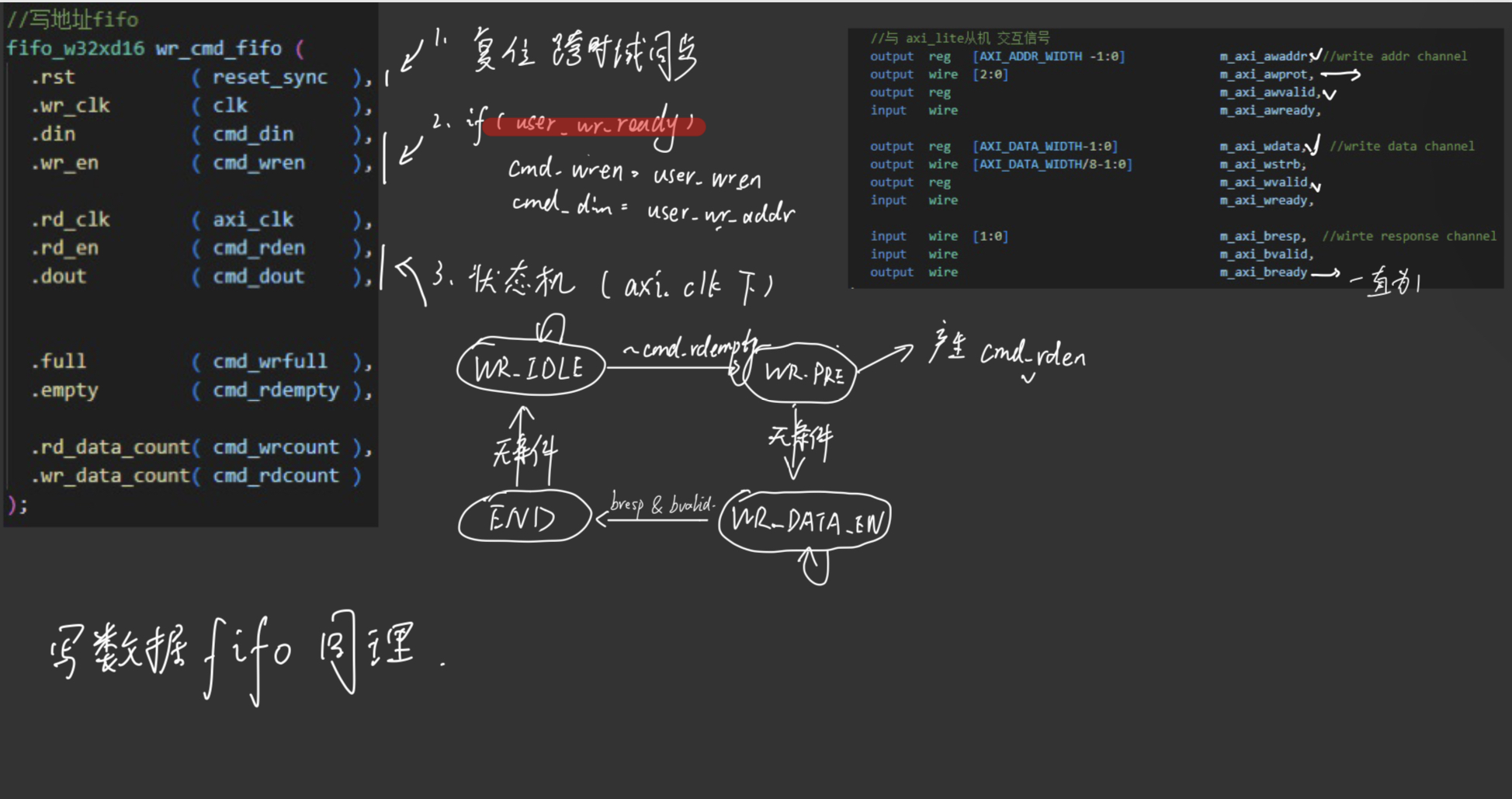
1.复位信号进行跨时钟域同步(用户时钟/AXI4时钟)
2.仅当user_wr_ready为高时,用户的写通道是有效的
3.例化两个fifo分别存储用户端传来的地址以及数据用户时钟写入,并通过AXI时钟读出
4.控制AXI_LITE(状态机)接口信号是在AXI时钟下进行 (控制cmd_rden/data_rden并输出对应的相关接口数据)
`timescale 1ns / 1ps
//
// Description: AXI_lite写通道
//
module axlite_wr_channel#(
parameter USER_WR_DATA_WIDTH = 32 ,//用户写数据位宽和AXI4—Lite数据位宽保持一致
parameter AXI_DATA_WIDTH = 32, //AXI4_LITE总线规定,数据位宽只支持32Bit或者64bit
parameter AXI_ADDR_WIDTH = 32
)(
input wire clk, //用户写时钟
input wire axi_clk, //从机读时钟
input wire reset,
//与 用户端 交互信号
input wire user_wr_en,
input wire [USER_WR_DATA_WIDTH-1:0] user_wr_data,
input wire [AXI_ADDR_WIDTH-1 :0] user_wr_addr,
output wire user_wr_ready,
//与 axi_lite从机 交互信号
output reg [AXI_ADDR_WIDTH -1:0] m_axi_awaddr, //write addr channel
output wire [2:0] m_axi_awprot,
output reg m_axi_awvalid,
input wire m_axi_awready,
output reg [AXI_DATA_WIDTH-1:0] m_axi_wdata, //write data channel
output wire [AXI_DATA_WIDTH/8-1:0] m_axi_wstrb,
output reg m_axi_wvalid,
input wire m_axi_wready,
input wire [1:0] m_axi_bresp, //wirte response channel
input wire m_axi_bvalid,
output wire m_axi_bready
);
(* dont_touch = "true"*) reg reset_sync_d0; //user clk
(* dont_touch = "true"*) reg reset_sync_d1;
(* dont_touch = "true"*) reg reset_sync;
(* dont_touch = "true"*) reg a_reset_sync_d0; //axi clk
(* dont_touch = "true"*) reg a_reset_sync_d1;
(* dont_touch = "true"*) reg a_reset_sync;
reg [31:0] cmd_din;
reg cmd_wren;
wire [31:0] cmd_dout;
reg cmd_rden;
wire cmd_wrfull ;
wire cmd_rdempty;
wire [4:0] cmd_wrcount;
wire [4:0] cmd_rdcount;
reg [31:0] data_din;
reg data_wren;
wire [31:0] data_dout;
reg data_rden;
wire data_wrfull;
wire data_rdempty;
wire [4:0] data_wrcount;
wire [4:0] data_rdcount;
reg [2 : 0] cur_status;
reg [2 : 0] nxt_status;
localparam WR_IDLE = 3'b000;
localparam WR_PRE = 3'b001;
localparam WR_DATA_EN = 3'b010;
localparam WR_END = 3'b100;
/*--------------------------------------------------*\
assign
\*--------------------------------------------------*/
assign m_axi_bready = 1'b1;
assign m_axi_awprot = 0;
assign m_axi_wstrb = {AXI_DATA_WIDTH/8{1'b1}};
assign user_wr_ready = reset_sync ? 1'b0 : cmd_wrcount <= 'd12 ; //留一点余量
//当user_wr_ready为低的时候,用户发送写是无效的
/*--------------------------------------------------*\
CDC process
\*--------------------------------------------------*/
always @(posedge clk) begin
reset_sync_d0 <= reset;
reset_sync_d1 <= reset_sync_d0;
reset_sync <= reset_sync_d1;
end
always @(posedge axi_clk) begin
a_reset_sync_d0 <= reset;
a_reset_sync_d1 <= a_reset_sync_d0;
a_reset_sync <= a_reset_sync_d1;
end
/*--------------------------------------------------*\
wirte addr to cmd fifo、write data to data fifo
\*--------------------------------------------------*/
always @(posedge clk) begin
if (user_wr_ready) begin
cmd_wren <= user_wr_en;
cmd_din <= user_wr_addr;
data_wren <= user_wr_en;
data_din <= user_wr_data;
end
else begin
cmd_wren <= 0;
cmd_din <= 0;
data_wren <= 0;
data_din <= 0;
end
end
/*--------------------------------------------------*\
WR state machine (三段式)
\*--------------------------------------------------*/
always@(posedge axi_clk)begin
if(a_reset_sync)
cur_status <= WR_IDLE;
else
cur_status <= nxt_status;
end
always@(*)begin
if(a_reset_sync)begin
nxt_status <= WR_IDLE;
end
else begin
case(cur_status)
WR_IDLE : begin
if(!cmd_rdempty)
nxt_status <= WR_PRE;
else
nxt_status <= cur_status;
end
WR_PRE : begin
nxt_status <= WR_DATA_EN;
end
WR_DATA_EN : begin
if (m_axi_bvalid && m_axi_bready)
nxt_status <= WR_END;
else
nxt_status <= cur_status;
end
WR_END : begin
nxt_status <= WR_IDLE;
end
default : nxt_status <= WR_IDLE;
endcase
end
end
/*-----------------------------------------------------------*\
read addr from cmd_fifo 、 read data from data_fifo
\*-----------------------------------------------------------*/
always @(*) begin
if (a_reset_sync) begin
cmd_rden <= 0;
data_rden <= 0;
end
else begin
cmd_rden <= cur_status == WR_PRE;
data_rden <= cur_status == WR_PRE;
end
end
always @(posedge axi_clk) begin
if (cmd_rden)
m_axi_awaddr <= cmd_dout;
else
m_axi_awaddr <= m_axi_awaddr;
end
always @(posedge axi_clk) begin
if (a_reset_sync)
m_axi_awvalid <= 0;
else if (cur_status == WR_PRE)
m_axi_awvalid <= 1'b1;
else if (m_axi_awvalid && m_axi_awready)
m_axi_awvalid <= 0;
end
always @(posedge axi_clk) begin
if (data_rden)
m_axi_wdata <= data_dout;
else
m_axi_wdata <= m_axi_wdata;
end
always @(posedge axi_clk) begin
if (a_reset_sync)
m_axi_wvalid <= 0;
else if (cur_status == WR_PRE)
m_axi_wvalid <= 1'b1;
else if (m_axi_wvalid && m_axi_wready)
m_axi_wvalid <= 0;
end
//写地址fifo
fifo_w32xd16 wr_cmd_fifo (
.rst ( reset_sync ), // input wire rst
.wr_clk ( clk ), // input wire wr_clk 用户写时钟
.din ( cmd_din ), // input wire [31 : 0] din
.wr_en ( cmd_wren ), // input wire wr_en
.rd_clk ( axi_clk ), // input wire rd_clk 从机读时钟
.rd_en ( cmd_rden ), // input wire rd_en
.dout ( cmd_dout ), // output wire [31 : 0] dout
.full ( cmd_wrfull ), // output wire full
.empty ( cmd_rdempty ), // output wire empty
.rd_data_count( cmd_wrcount ), // output wire [4 : 0] rd_data_count
.wr_data_count( cmd_rdcount ) // output wire [4 : 0] wr_data_count
);
//写数据fifo
fifo_w32xd16 wr_data_fifo (
.rst ( reset_sync ), // input wire rst
.wr_clk ( clk ), // input wire wr_clk 用户写时钟
.din ( data_din ), // input wire [31 : 0] din
.wr_en ( data_wren ), // input wire wr_en
.rd_clk ( axi_clk ), // input wire rd_clk 从机读时钟
.rd_en ( data_rden ), // input wire rd_en
.dout ( data_dout ), // output wire [31 : 0] dout
.full ( data_wrfull ), // output wire full
.empty ( data_rdempty ), // output wire empty
.rd_data_count( data_rdcount ), // output wire [4 : 0] rd_data_count
.wr_data_count( data_wrcount ) // output wire [4 : 0] wr_data_count
);
endmodule
2.3 读通道
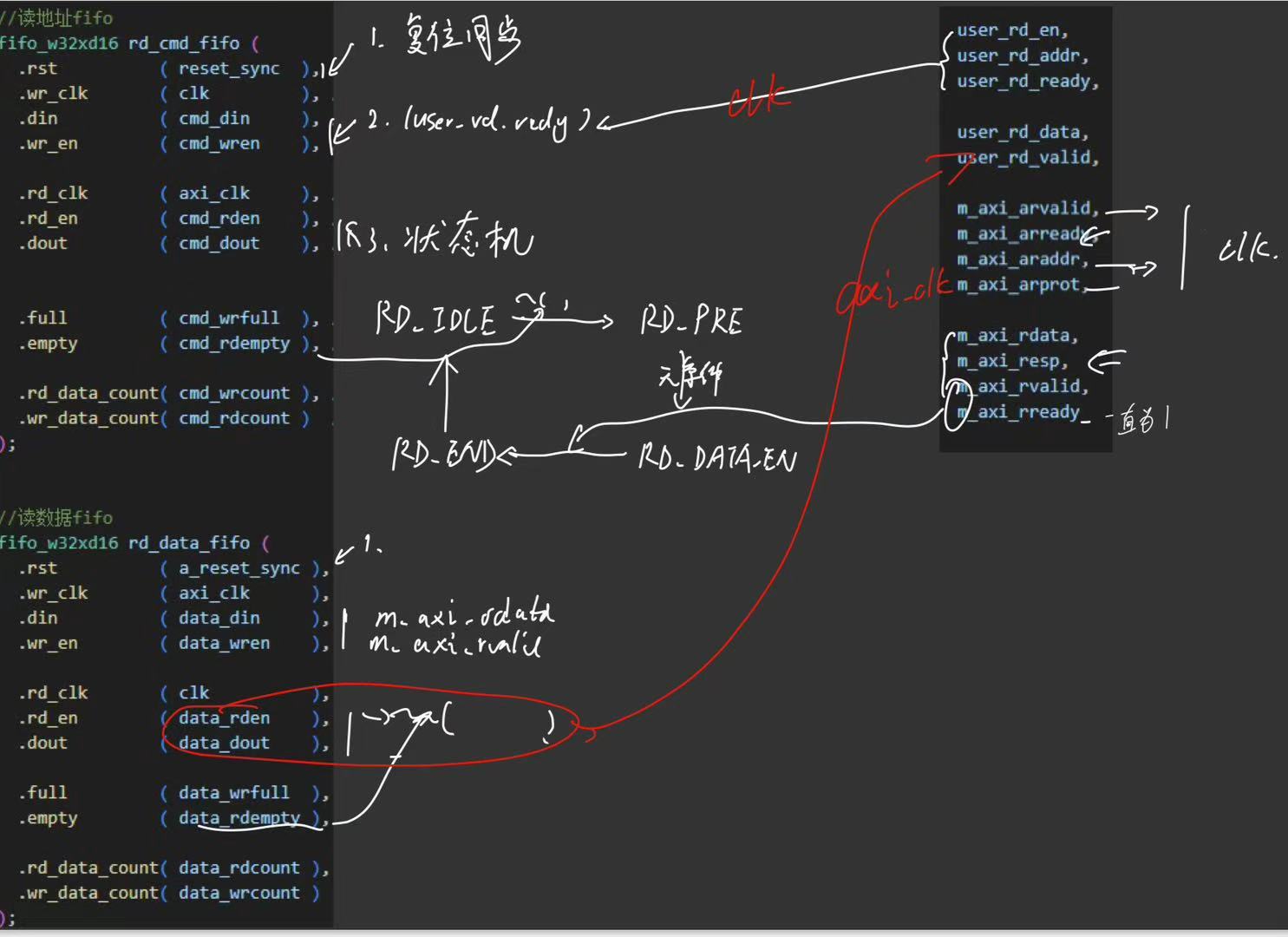
读通道的实现分两步,用户端发出读请求并给读的地址,然后从机根据地址发出数据,用户读出。
因此读地址fifo的逻辑部分与写通道一致,只有状态机跳转的RD_DATA_EN的条件根据模块端口有所改变,但是读数据fifo,是在AXI_CLK的时钟域下,端口输入有效及端口输入数据,根据非空开始用户读,然后赋给模块用户端口
`timescale 1ns / 1ps
//
// Description: AXI_LITE读通道
//
module axilite_rd_channel#(
parameter USER_RD_DATA_WIDTH = 32 , //用户读数据位宽和AXI4—Lite数据位宽保持一致
parameter AXI_DATA_WIDTH = 32,
parameter AXI_ADDR_WIDTH = 32
)(
input wire clk,
input wire axi_clk,
input wire reset,
//用户端读请求,读地址信号
input wire user_rd_en,
input wire [AXI_ADDR_WIDTH-1 :0] user_rd_addr,
output wire user_rd_ready,
output reg [USER_RD_DATA_WIDTH-1:0] user_rd_data,
output reg user_rd_valid,
//与AXI_LITE从机 交互信号
output reg m_axi_arvalid, // axi read address channel
input wire m_axi_arready,
output reg [AXI_ADDR_WIDTH-1:0] m_axi_araddr,
output wire [2:0] m_axi_arprot,
input wire [AXI_DATA_WIDTH-1:0] m_axi_rdata, // axi read data channel
input wire [1:0] m_axi_resp,
input wire m_axi_rvalid,
output wire m_axi_rready
);
(* dont_touch = "true"*) reg reset_sync_d0; //user clk
(* dont_touch = "true"*) reg reset_sync_d1;
(* dont_touch = "true"*) reg reset_sync;
(* dont_touch = "true"*) reg a_reset_sync_d0; //axi clk
(* dont_touch = "true"*) reg a_reset_sync_d1;
(* dont_touch = "true"*) reg a_reset_sync;
reg [31:0] cmd_din;
reg cmd_wren;
wire [31:0] cmd_dout;
reg cmd_rden;
wire cmd_wrfull;
wire cmd_rdempty;
wire [4:0] cmd_wrcount;
wire [4:0] cmd_rdcount;
reg [31:0] data_din;
reg data_wren;
wire [31:0] data_dout;
wire data_rden;
wire data_wrfull;
wire data_rdempty;
wire [4:0] data_wrcount;
wire [4:0] data_rdcount;
reg [2 : 0] cur_status;
reg [2 : 0] nxt_status;
localparam RD_IDLE = 3'b000;
localparam RD_PRE = 3'b001;
localparam RD_DATA_EN = 3'b010;
localparam RD_END = 3'b100;
/*--------------------------------------------------*\
assign
\*--------------------------------------------------*/
assign user_rd_ready = reset_sync ? 1'b0 : cmd_wrcount <= 'd12 ;
assign m_axi_rready = 1'b1;
assign m_axi_arprot = 0;
/*--------------------------------------------------*\
CDC process
\*--------------------------------------------------*/
always @(posedge clk) begin
reset_sync_d0 <= reset;
reset_sync_d1 <= reset_sync_d0;
reset_sync <= reset_sync_d1;
end
always @(posedge axi_clk) begin
a_reset_sync_d0 <= reset;
a_reset_sync_d1 <= a_reset_sync_d0;
a_reset_sync <= a_reset_sync_d1;
end
/*--------------------------------------------------*\
wirte addr to cmd fifo
\*--------------------------------------------------*/
always @(posedge clk) begin
if (user_rd_ready) begin
cmd_wren <= user_rd_en;
cmd_din <= user_rd_addr;
end
else begin
cmd_wren <= 0;
cmd_din <= 0;
end
end
/*--------------------------------------------------*\
RD state machine
\*--------------------------------------------------*/
always @(posedge axi_clk) begin
if (a_reset_sync) begin
cur_status <= RD_IDLE;
end
else begin
cur_status <= nxt_status;
end
end
always @(*) begin
if (a_reset_sync) begin
nxt_status <= RD_IDLE;
end
else begin
case(cur_status)
RD_IDLE : begin
if (~cmd_rdempty)
nxt_status <= RD_PRE;
else
nxt_status <= cur_status;
end
RD_PRE : begin
nxt_status <= RD_DATA_EN;
end
RD_DATA_EN : begin
if (m_axi_rvalid && m_axi_rready)
nxt_status <= RD_END;
else
nxt_status <= cur_status;
end
RD_END : begin
nxt_status <= RD_IDLE;
end
default : nxt_status <= RD_IDLE;
endcase
end
end
/*-----------------------------------------------------------*\
read addr from cmd_fifo
\*-----------------------------------------------------------*/
always @(*) begin
if (a_reset_sync)
cmd_rden <= 0;
else
cmd_rden <= cur_status == RD_PRE;
end
always @(posedge axi_clk) begin
if (cmd_rden)
m_axi_araddr <= cmd_dout;
else
m_axi_araddr <= m_axi_araddr;
end
always @(posedge axi_clk) begin
if (a_reset_sync)
m_axi_arvalid <= 0;
else if (cur_status == RD_PRE)
m_axi_arvalid <= 1'b1;
else if (m_axi_arvalid && m_axi_arready)
m_axi_arvalid <= 0;
end
/*-----------------------------------------------------------*\
read user data from data fifo
\*-----------------------------------------------------------*/
always @(posedge axi_clk) begin
data_din <= m_axi_rdata;
data_wren <= m_axi_rvalid;
end
assign data_rden = reset_sync ? 1'b0 : ~data_rdempty;
always @(posedge clk) begin
user_rd_valid <= data_rden;
user_rd_data <= data_dout;
end
//读地址fifo
fifo_w32xd16 rd_cmd_fifo (
.rst ( reset_sync ), // input wire rst
.wr_clk ( clk ), // input wire wr_clk 用户写时钟
.din ( cmd_din ), // input wire [31 : 0] din
.wr_en ( cmd_wren ), // input wire wr_en
.rd_clk ( axi_clk ), // input wire rd_clk 从机读时钟
.rd_en ( cmd_rden ), // input wire rd_en
.dout ( cmd_dout ), // output wire [31 : 0] dout
.full ( cmd_wrfull ), // output wire full
.empty ( cmd_rdempty ), // output wire empty
.rd_data_count( cmd_wrcount ), // output wire [4 : 0] rd_data_count
.wr_data_count( cmd_rdcount ) // output wire [4 : 0] wr_data_count
);
//读数据fifo
fifo_w32xd16 rd_data_fifo (
.rst ( a_reset_sync ), // input wire rst
.wr_clk ( axi_clk ), // input wire wr_clk 从机写时钟
.din ( data_din ), // input wire [31 : 0] din
.wr_en ( data_wren ), // input wire wr_en
.rd_clk ( clk ), // input wire rd_clk 用户读时钟
.rd_en ( data_rden ), // input wire rd_en
.dout ( data_dout ), // output wire [31 : 0] dout
.full ( data_wrfull ), // output wire full
.empty ( data_rdempty ), // output wire empty
.rd_data_count( data_rdcount ), // output wire [4 : 0] rd_data_count
.wr_data_count( data_wrcount ) // output wire [4 : 0] wr_data_count
);
endmodule
3.仿真
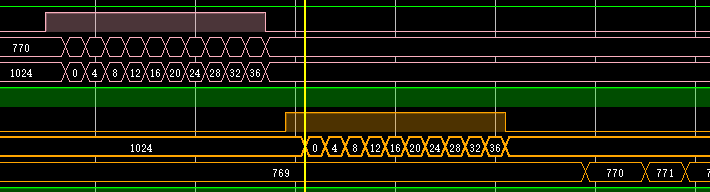
通过调用AXI_LITE接口的BRAM IP核,实/复位结束等一会儿进入写数据状态,读写数据(写10个数据,读10个数据),数据一致累加,地址也不断累加,地址最大为1024。
仿真结果如下,可以看出读写地址和数据完全一样,说明AXI_LITE接口代码实现无误。

![]()

需要工程请私信