引言
在嵌入式系统开发中,电机驱动是一个常见且重要的功能。L298N是一款高电压、大电流电机驱动芯片,广泛应用于各种电机控制场景,如直流电机的正反转、调速,以及步进电机的驱动等。本文将详细介绍如何使用51单片机来控制L298N电机驱动模块,帮助大家快速上手相关项目开发。
L298N电机驱动模块简介
L298N内部包含4通道逻辑驱动电路,可以方便地驱动两个直流电机或者一个两相步进电机。它具有以下主要特点:
- 高电压、大电流:能够提供高达46V的电压和2A的电流,满足大多数电机的驱动需求。
- 逻辑兼容性好:可以直接与5V逻辑电平的微控制器(如51单片机)连接。
- 控制灵活:通过控制输入引脚的电平状态,可以方便地实现电机的正反转、制动和使能等功能。
从外观上看,L298N模块通常由红色的电路板、黑色的散热片以及多个引脚和接线端子组成,如图所示:
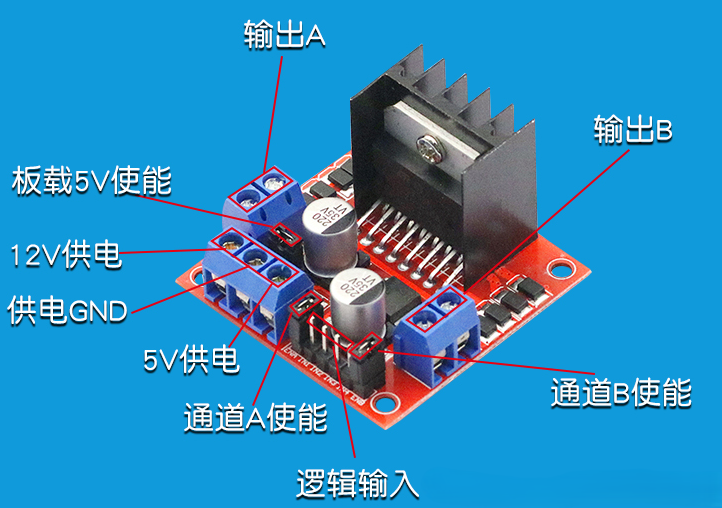
(此处可替换为实际图片链接)
模块上的引脚功能如下:
- 12V供电:为L298N内部电路提供工作电源,一般接12V直流电源。
- 供电GND:电源地,与12V供电的地相连。
- 5V供电:为L298N的逻辑电路提供5V电源,也可为5V单片机供电(注意电流限制)。
- 板载5V使能:当该引脚接高电平时,5V供电输出有效;接低电平时,5V输出被切断。
- 通道A使能(ENA):控制通道A(输出A)电机的使能状态,高电平有效。
- 逻辑输入(IN1、IN2):控制通道A电机的正反转,通过不同的电平组合实现。
- 通道B使能(ENB):控制通道B(输出B)电机的使能状态,高电平有效。
- 逻辑输入(IN3、IN4):控制通道B电机的正反转,通过不同的电平组合实现。
- 输出A:连接直流电机的一端或步进电机的一相。
- 输出B:连接直流电机的另一端或步进电机的另一相。
硬件连接
电源连接
- 将12V直流电源的正极连接到L298N模块的12V供电引脚。
- 将12V直流电源的负极连接到L298N模块的供电GND引脚。
- 如果51单片机的工作电压为5V,可以将L298N模块的5V供电引脚连接到51单片机的5V电源引脚,同时将L298N模块的供电GND引脚也连接到51单片机的GND引脚。注意,L298N的5V供电能力有限,若同时驱动多个大电流设备,可能需要额外为51单片机提供独立的5V电源。
| 注意 |
| “板载5V” 的短接口连上时,12v和GND为电源接入,5V为电源输出 |
| 通道A和通道B的使能引脚短接:可以控制两个电机的正反转 |
| 逻辑输入IN1和IN2控制OUT1和OUT2;逻辑输入IN3和IN4控制OUT3和OUT4; |
电机连接
假设我们要驱动一个直流电机,将电机的两端分别连接到L298N模块的Output 1(输出A)和Output 2(输出B)引脚。
51单片机连接
- 使能引脚连接:
- 将51单片机的一个GPIO引脚(例如P1.0)连接到L298N模块的通道A使能引脚(ENA)。
- 将51单片机的另一个GPIO引脚(例如P1.1)连接到L298N模块的通道B使能引脚(ENB)。
- 逻辑输入引脚连接:
- 将51单片机的一个GPIO引脚(例如P1.2)连接到L298N模块的逻辑输入引脚IN1。
- 将51单片机的一个GPIO引脚(例如P1.3)连接到L298N模块的逻辑输入引脚IN2。
- 将51单片机的一个GPIO引脚(例如P1.4)连接到L298N模块的逻辑输入引脚IN3。
- 将51单片机的一个GPIO引脚(例如P1.5)连接到L298N模块的逻辑输入引脚IN4。
板载5V使能连接(可选)
如果需要使用L298N模块的板载5V供电功能,可以将51单片机的一个GPIO引脚连接到板载5V使能引脚,并在程序中进行控制。
软件编程
电机正反转
下面以51单片机C语言为例,给出控制直流电机正反转的代码示例:
#include <reg51.h>
#include < intrins.h>
// 定义引脚
sbit ENA = P1^0; // 通道A使能引脚
sbit ENB = P1^1; // 通道B使能引脚
sbit IN1 = P1^2; // 通道A逻辑输入引脚1
sbit IN2 = P1^3; // 通道A逻辑输入引脚2
sbit IN3 = P1^4; // 通道B逻辑输入引脚1
sbit IN4 = P1^5; // 通道B逻辑输入引脚2
// 延时函数
void delay(unsigned int time)
{
unsigned int i, j;
for(i = 0; i < time; i++)
for(j = 0; j < 1275; j++);
}
void main()
{
while(1)
{
// 电机正转
ENA = 1; // 使能通道A
IN1 = 1;
IN2 = 0;
delay(5000); // 延时一段时间
// 电机反转
ENA = 1; // 保持通道A使能
IN1 = 0;
IN2 = 1;
delay(5000); // 延时一段时间
// 电机停止
ENA = 0; // 失能通道A
delay(5000); // 延时一段时间
}
}
在上述代码中:
- 首先定义了与L298N模块连接的51单片机引脚。
delay函数用于实现简单的延时功能,通过嵌套循环来消耗一定的时间。- 在
main函数中,通过改变ENA、IN1和IN2的电平状态来控制电机的正转、反转和停止。
电机调速
如果要实现电机的调速功能,可以使用PWM(脉冲宽度调制)技术。以定时器T0产生PWM信号控制ENA引脚为例,代码如下:
#include <reg51.h>
#include < intrins.h>
// 定义引脚
sbit ENA = P1^0; // 通道A使能引脚
sbit ENB = P1^1; // 通道B使能引脚
sbit IN1 = P1^2; // 通道A逻辑输入引脚1
sbit IN2 = P1^3; // 通道A逻辑输入引脚2
sbit IN3 = P1^4; // 通道B逻辑输入引脚1
sbit IN4 = P1^5; // 通道B逻辑输入引脚2
// 定义PWM相关变量
unsigned char PWM_Count;
unsigned char PWM_Duty;
// 初始化定时器T0为PWM模式
void Timer0_Init()
{
TMOD = 0x01; // 设置定时器T0为工作方式1
TH0 = 0xFE; // 设置定时器初值,产生1ms的定时周期(假设晶振为12MHz)
TL0 = 0x33;
ET0 = 1; // 使能定时器T0中断
EA = 1; // 使能总中断
TR0 = 1; // 启动定时器T0
}
// 定时器T0中断服务程序
void Timer0_ISR(void) interrupt 1
{
TH0 = 0xFE; // 重新赋初值
TL0 = 0x33;
PWM_Count++;
if (PWM_Count >= PWM_Duty)
{
ENA = 0; // 低电平,电机减速
}
else
{
ENA = 1; // 高电平,电机加速
}
if (PWM_Count >= 100) // PWM周期为100ms
{
PWM_Count = 0;
}
}
// 设置PWM占空比
void Set_PWM_Duty(unsigned char duty)
{
PWM_Duty = duty;
}
void main()
{
Timer0_Init();
while(1)
{
// 电机正转并设置PWM占空比为50%