文章目录
- openpnp - 贴片前, 放入一块新板子后, 对板子的坐标矫正
- 概述
- 笔记
- 实验前置条件
- 实验开始
- 建立自己板子上的Mark点封装, 用于自己人工圈定判断Mark点位置是否正确
- 建立mark点封装
- 根据多个mark点, 来精确定位板子左下角原点坐标
- END
openpnp - 贴片前, 放入一块新板子后, 对板子的坐标矫正
概述
openpnp提供了放入新板子后, 根据设置的mark点封装和元件, 对板子做贴片前坐标自动矫正的功能.
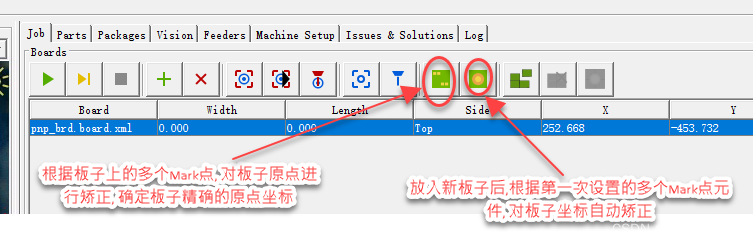
经过多次实验, 发现openpnp提供的对放入新板子后, 根据第一次矫正时设置的多个Mark点, 进行自动矫正的功能是不好使的(偶尔会成功), 伤心了(实验了10几次, 最后发现openpnp提供的自动矫正坐标是个不好使的烂功能…).
只能每次放入新板子, 都重新确定一下板子原点, 才是靠谱的做法.
我的设备是有夹具的, 放入同类的新板子后, 坐标基本不差, 只是走一遍流程, 最多用10秒钟就能将坐标确认完.
发现, 如果不用openpnp提供的mark点自动矫正坐标功能, 给自己人工比对的mark点, 搞成1mmx1mm的正方形比对框还好用些.
板子坐标矫正, 是为了使贴片时吸嘴落到板子上的元件时, 位置更准确.
笔记
重新记录一次, 以后贴片之前, 就这么来矫正板子坐标.
实验前置条件
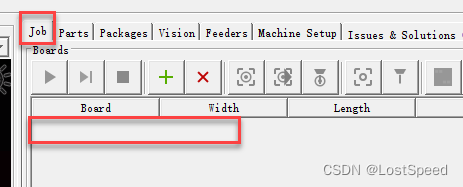
将job删掉
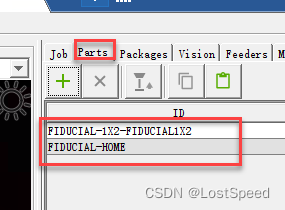
将多余的part删掉
需要保留的2有2个
FIDUCIAL-HOME, 这个是主基准点用的, 不能删除.
FIDUCIAL-1x2, 这个是次基准点用的, 不能删除
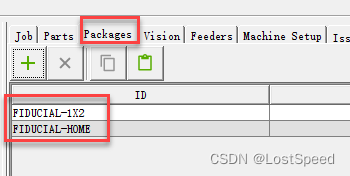
封装页中, 除了主/次基准点的封装, 也都删掉
飞达页, 除了自己建立的飞达, 其余都删掉.
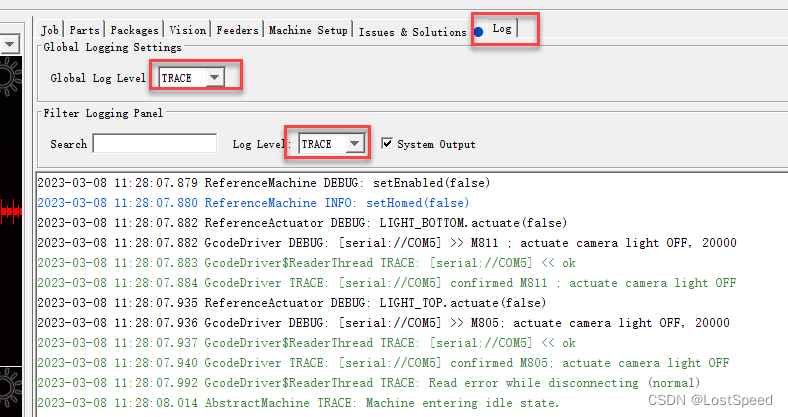
日志页, 可以设置成TRACE + TRACE
save job, save 配置.
openpnp关机, 退出
openpnp启动, 开机, 归零.
实验开始
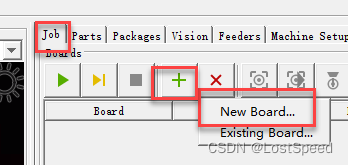
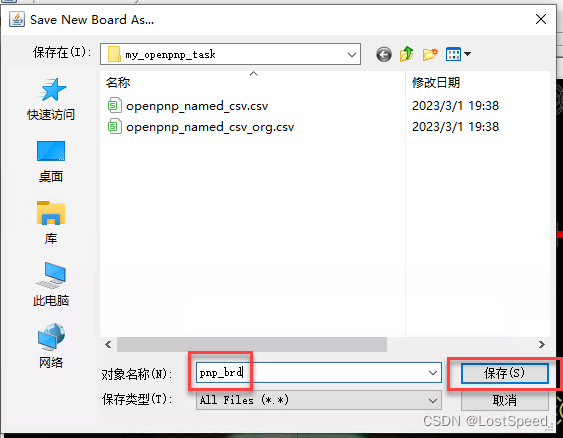
增加openpnp板子配置
填写Z坐标.
板子的Z坐标, 就填写Z轴的低限位(当时设置Z低限位时, 将N1降低到夹具上的PCB表面获取的Z坐标) -17.6mm
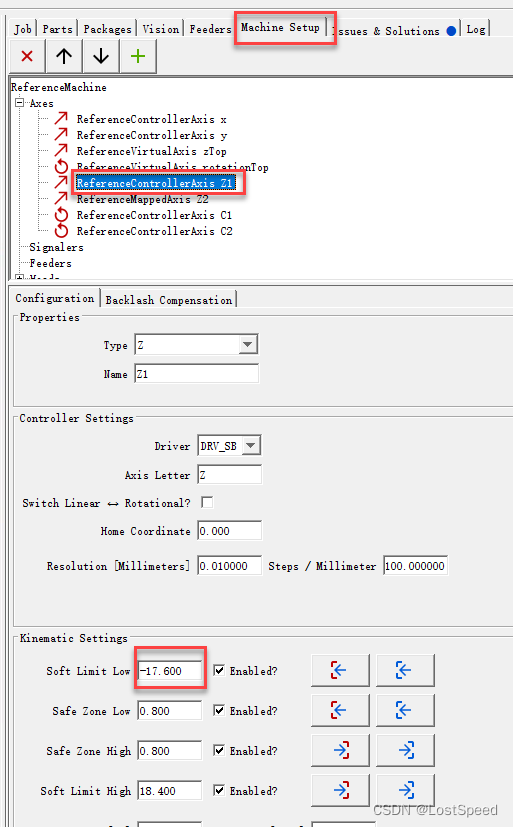

因为openpnp自动矫正新板子坐标功能不好使, 所以"Check Fids?"不要打勾
在夹具中放入新板子
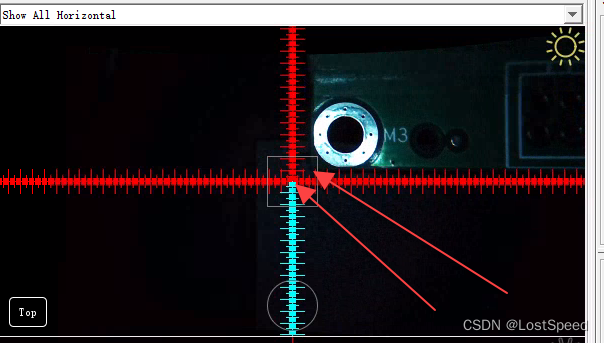
打开顶部相机, 用JLOG移动顶部相机到离板子左下角1~2mm的地方. 不要太远, 肉眼辨认板边容易, 矫正板子原点坐标时, 需要微调的距离短, , 方便一些.
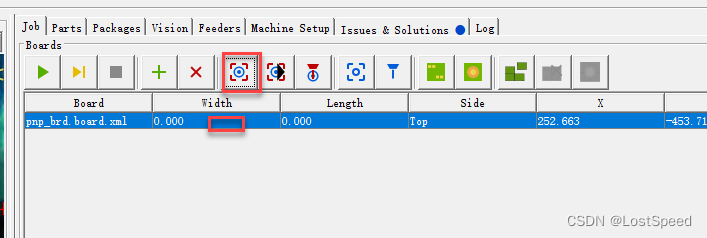
捕获当前板子原点坐标的粗略位置

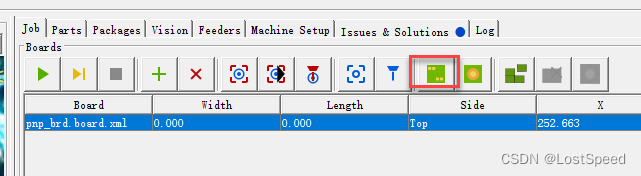
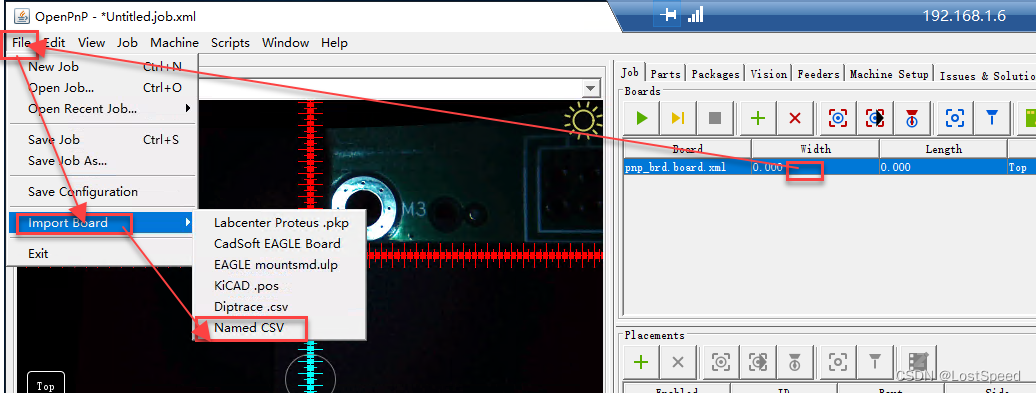
选中当前板子条目, 导入named csv坐标文件
建立自己板子上的Mark点封装, 用于自己人工圈定判断Mark点位置是否正确
首先, 从自己的PCB和原理图中, 确定自己用的Mark点实际封装.
我这板子统一用的1mm直径的表贴焊盘, 那么我们就做一个1mm的正方形作为封装来人工确认mark点是否定位准确.
建立mark点封装
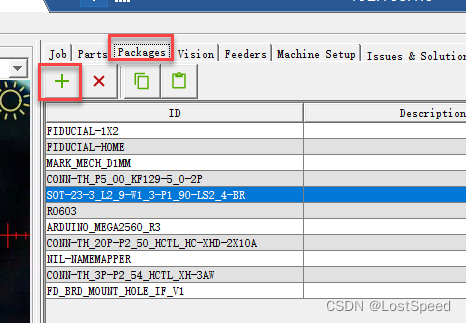
封装名称为 MK
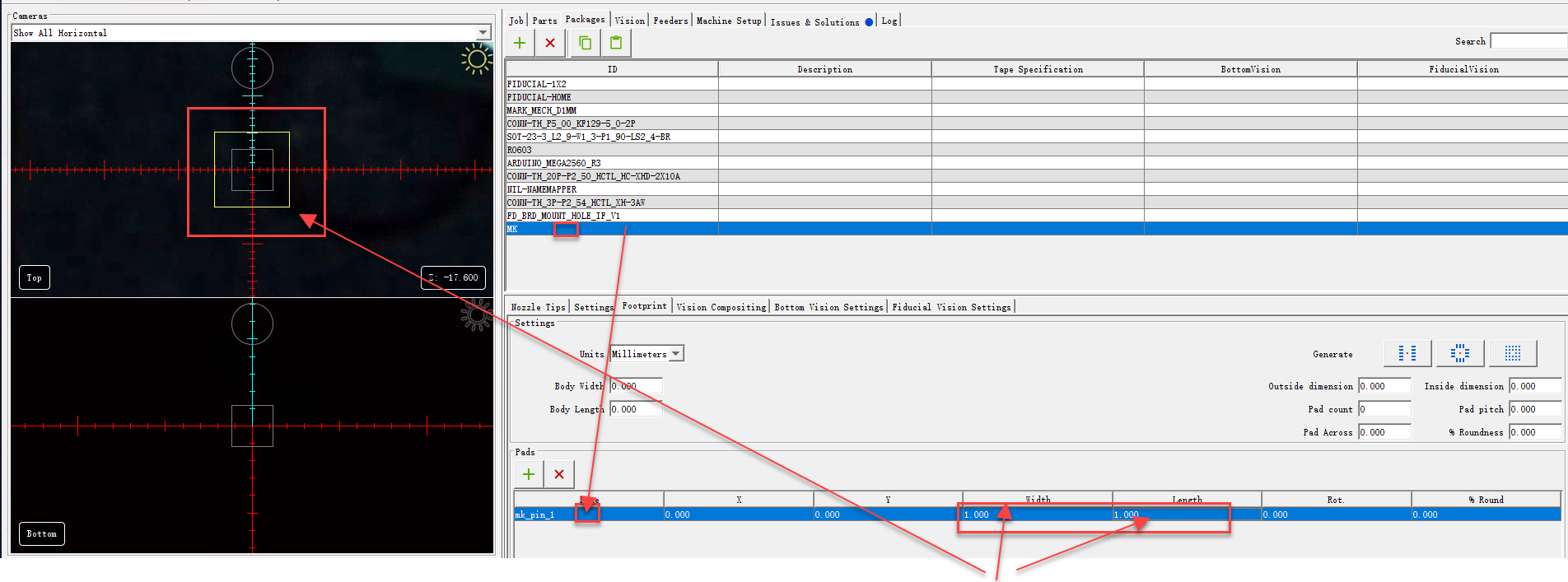
为封装增加管教 mk_pin_1
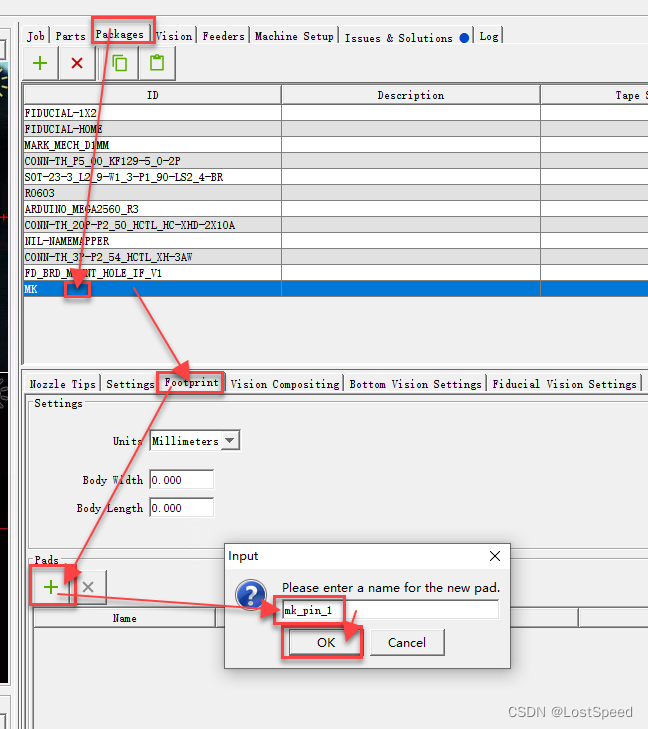
为管脚定义一个1mm的正方形, 此时, 顶部相机在哪里都无所谓.
保存JOB, 保存配置.
新建元件MK, 使用MK封装
将MK元件的封装指定为MK封装
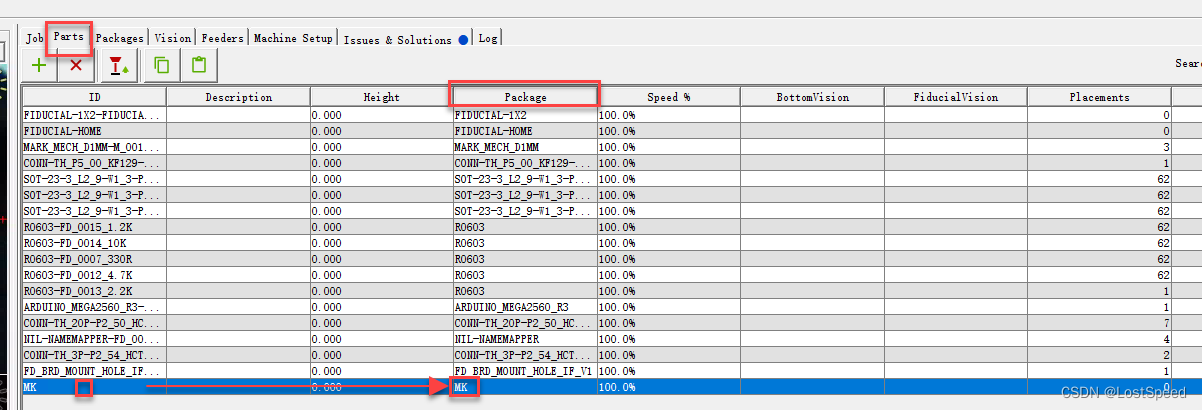
保存JOB
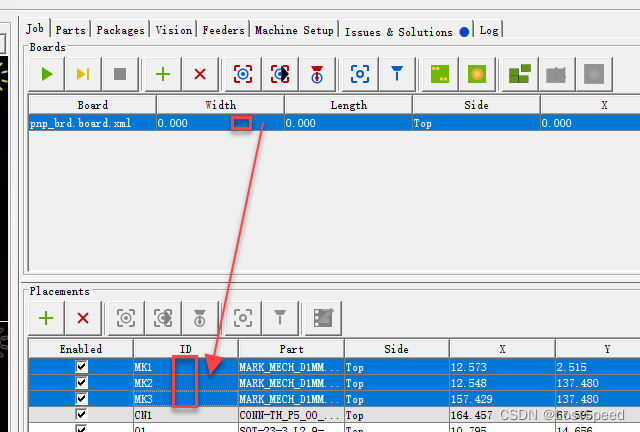
去JOB页的placements页, 将3个mark点的封装都改为MK
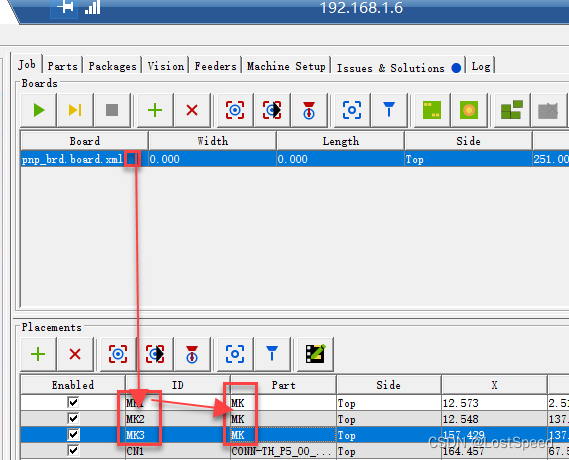
根据多个mark点, 来精确定位板子左下角原点坐标
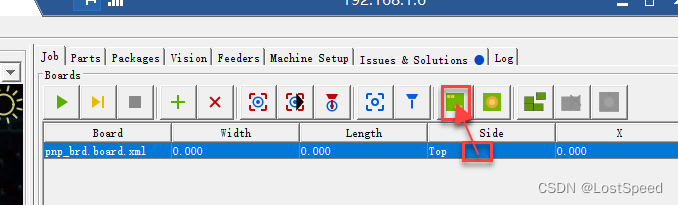
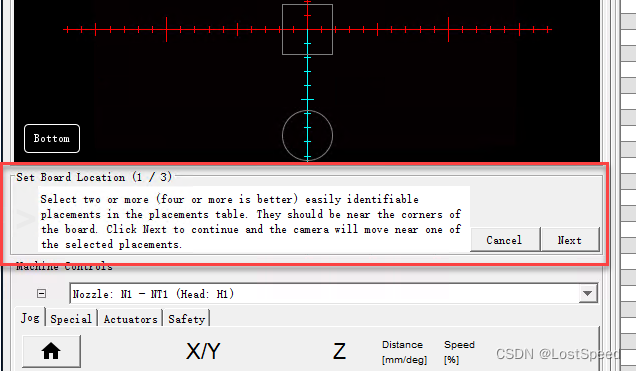
JOG窗口上面, 出现了任务提示框.
根据提示, 将3个Mark点在placements页中选中.
点击提示框的Next按钮

此时, 如果有报错, 说明没有捕获板子原点坐标的大致位置, 取消, 回到前面去大致捕获板子原点的位置才行.
openpnp将自动移动到选中的3个Mark点中的一个. 我这里是MK2
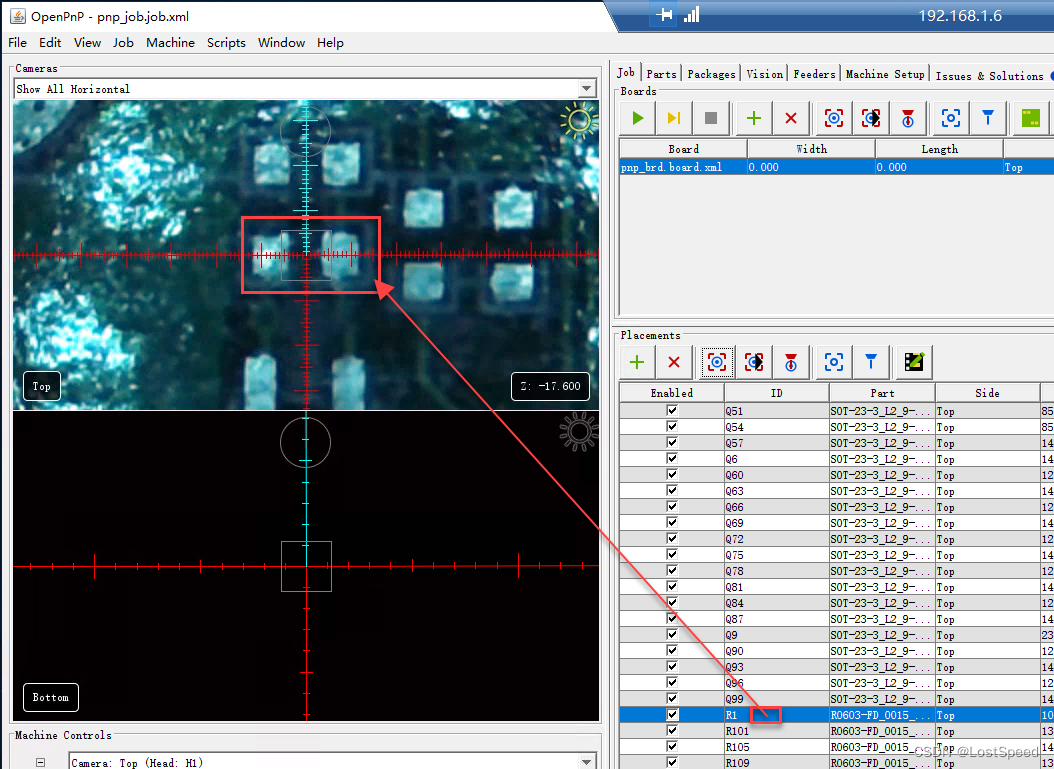
看提示, 说, 此时, 要精确的移动JLOG, 将MK2精确定位, 因为我们选的封装是1mm的正方形, 框住mark点的操作, 此时很方便.
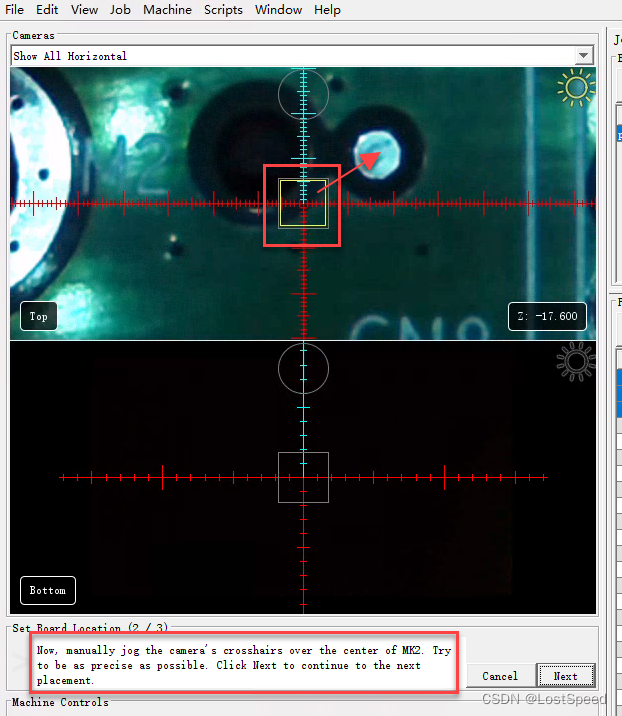
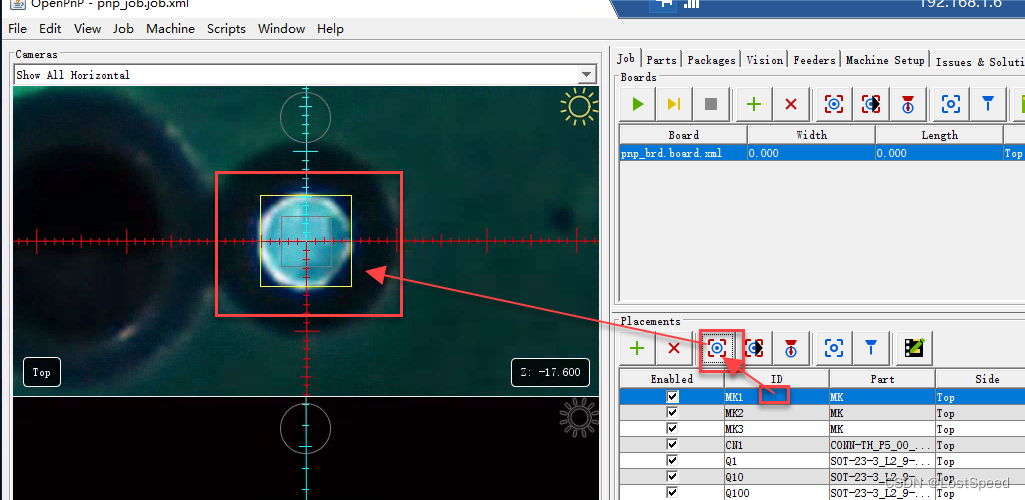
组合不同步长(1mm, 0.1mm, 0.01mm)和相机方法倍数, 将顶部相机MK封装的黄框, 精确的套住板子上的实际的MK2, 然后点击Next

现在顶部相机移动到了MK3, 根据提示, 用MK封装的黄框精确套住MK3, 点击Next.
现在顶部相机移动到了MK1, 根据提示, 用MK封装的黄框精确套住MK1, 点击Next.

现在已经精确定位了所有我们选择的Mark点, 现在openpnp提示, 点击Finish可以结束调整 .
那就点击Finish.
此时, 顶部相机已经回到新的精确远点位置.
保存job

可以看到, 现在板子远点位置已经不是我们粗略捕获的位置了, 而是一个精确的位置.
用元件导航功能, 看看3个Mark点和其他元件位置是否都精确?
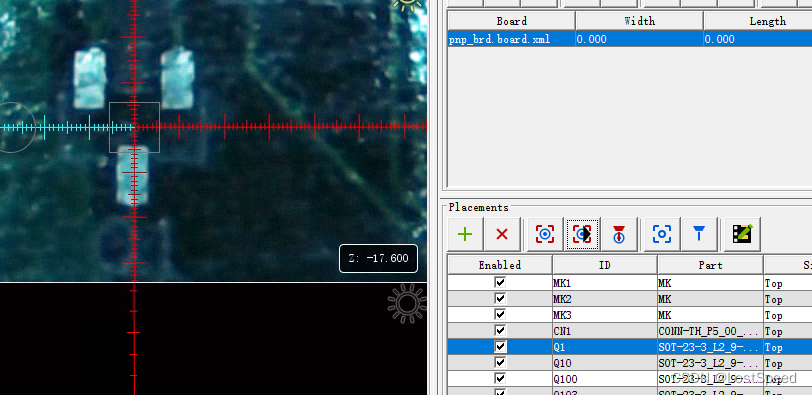
保存JOB!
千万不要再使用根据Mark点元件, 自动定位坐标的功能

此时, 就可以贴片了(元件高度配置好了, 如果飞达飞达配置好了).
如果我们将板子从夹具上拿下来了, 或者重新安装了一块PCB到了夹具上, 此时要校验一下坐标是否精确.
就重新使用一次矫正板子坐标原点的功能, 因为夹具是和精确的, 将板子推到位, 矫正过程基本是走一遍流程, 3个mark点的位置基本不用动, 很快. 如果发现位置有调整, 导致JOB变了, 保存JOB.