城市路内停车管理常因行道树遮挡、高位设备盲区等问题,导致车牌识别率低、逃费率高,传统模式在复杂路段束手无策。免布线低位视频桩凭借超低视角部署与智能算法,正成为破局关键。该设备安装于车位侧方0.5-0.7米高度,直接规避树枝遮挡,结合广角镜头与AI补偿技术,实现全天候精准识别。免布线低位视频桩无需开挖道路铺设线缆,大幅降低施工对交通的影响,为高密度城区提供轻量化改造方案。
复杂路段停车监管方案
行道树茂密、路侧障碍物多的区域是传统视频监管的"黑洞"。免布线低位视频桩通过近地视角采集,彻底规避高位设备被枝叶遮挡的缺陷。其内置动态聚焦算法,可自动调节识别区域,即使车辆被部分遮挡(如三轮车、异型车),仍能通过局部特征精准抓拍车牌。实际应用显示,在梧桐树覆盖路段,识别率从高位设备的68%提升至99.2%,彻底扫除监管盲区。

路内停车盲区监测技术
路内车辆紧贴人行道停放时,高位设备易因角度问题丢失车牌信息。免布线低位视频桩采用侧向45度角安装,直接覆盖车头至车尾全范围。当车辆完全驶入车位后,设备在5秒内完成车牌抓拍与车位状态判定,并通过4G/5G实时回传数据。同时,其配备的地磁协同模块可二次校验车辆状态,杜绝"误拍空位"或"漏拍满位",实现监管零盲区覆盖。

低功耗视频桩安装运维
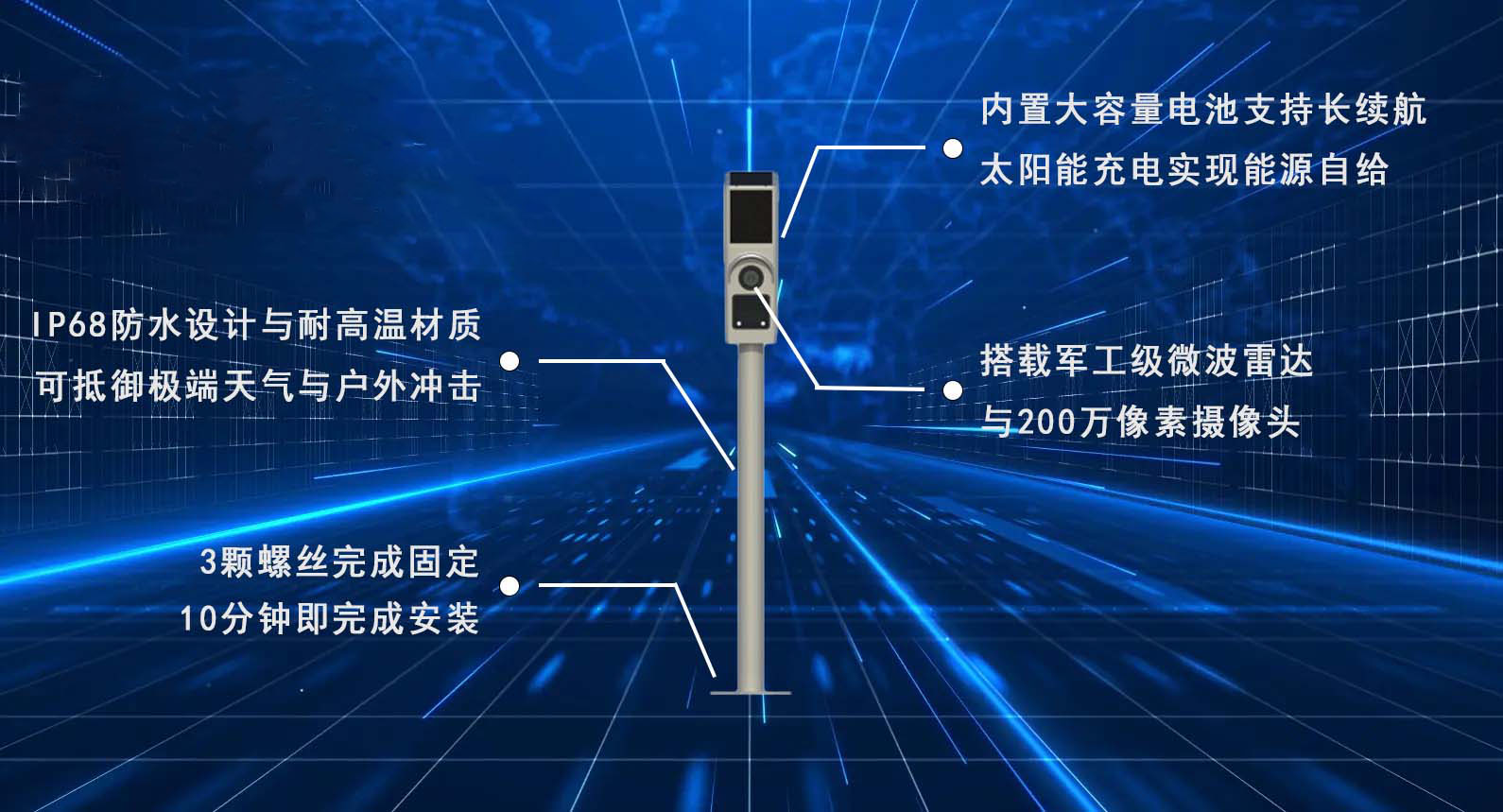
传统设备依赖市电,施工需封闭道路、切割路面,单点位部署成本超万元。免布线低位视频桩采用太阳能+锂电池供电方案,晴天环境下2小时光照即可支持7天运行。整机功耗低于5W/IPC,配合IP68防护等级与防撞设计,可耐受极端天气与意外碰撞。运维人员通过远程管理平台实时监测设备电量、信号状态,仅需每季度现场巡检维护,人力成本降低70%。
免布线低位视频桩通过空间维度的创新部署,系统性攻克了复杂路段的识别难题。其价值不仅在于99%以上的精准识别率,更在于以"零破路、快部署、低运维"的轻量化模式,为城市存量停车空间升级提供了经济高效的路径,让每一寸路侧资源释放最大管理效能。