一、需求描述
设计一个简单的视频上色应用,用户可以通过网页界面上传黑白视频,系统会自动将其转换为彩色视频。整个过程对用户来说非常简单直观,不需要了解技术细节。
效果图

二、实现思路
总体思路:
- 用户通过Gradio界面上传黑白视频
- 视频被传递给
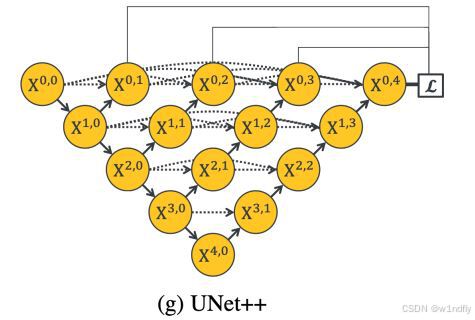
video_colorize函数 - 函数使用ModelScope平台提供的UNet模型进行视频上色
- 处理后的视频路径被返回给Gradio界面
- Gradio界面显示上色后的视频
2.1 导入依赖库
import gradio as gr
import os
import torch
import tempfile
from modelscope.outputs import OutputKeys
from modelscope.pipelines import pipeline
from modelscope.utils.constant import Tasks
gradio: 用于创建Web界面的库,可以快速构建机器学习模型的演示界面os: Python标准库,用于处理文件和目录操作torch: PyTorch深度学习框架tempfile: Python标准库,用于处理临时文件和目录modelscope: 阿里云开源的模型即服务框架,提供了大量预训练模型OutputKeys: 定义了模型输出的标准键名pipeline: 用于创建模型推理管道Tasks: 定义了支持的任务类型
2.2 安全设置和临时目录配置
# 添加安全全局变量设置
torch.serialization.add_safe_globals([slice])
# 设置临时目录
temp_dir = "D:/condaLearning/temp"
os.makedirs(temp_dir, exist_ok=True)
tempfile.tempdir = temp_dir
torch.serialization.add_safe_globals: 添加安全的全局变量,用于模型加载os.makedirs: 创建临时目录exist_ok=True表示如果目录已存在则不报错
tempfile.tempdir: 设置临时文件的默认目录
2.3 视频上色video_colorize函数
def video_colorize(input_video):
# 在临时目录中创建输出文件路径
output_video_path = os.path.join(temp_dir, 'colored_video.mp4')
# 创建视频上色管道
colorizer = pipeline(Tasks.video_colorization,
model='damo/cv_unet_video-colorization',
device='cuda')
# 进行视频上色
result = colorizer(input_video)
# 返回处理后的视频路径
return result[OutputKeys.OUTPUT_VIDEO]
os.path.join:该函数用于将多个路径组合成为输出文件的路径output_video_path,该路径为D:/condaLearning/temp/colored_video.mp4pipeline: 创建模型推理管道Tasks.video_colorization: 指定任务类型为视频上色model='damo/cv_unet_video-colorization': 使用ModelScope中的视频上色模型damo/cv_unet_video-colorizationdevice='cuda': 使用GPU进行推理
colorizer(input_video): 执行视频上色result[OutputKeys.OUTPUT_VIDEO]: 获取处理后的视频路径
2.4 Gradio界面创建
# 创建Gradio界面
demo = gr.Interface(
fn=video_colorize,
inputs=gr.Video(label="上传黑白视频"),
outputs=gr.Video(label="上色后的视频"),
)
gr.Interface: 调用Gradio的Interface类,来创建Gradio界面fn=video_colorize: 指定处理函数为video_colorizeinputs=gr.Video: 使用视频上传组件,标签为"上传黑白视频"outputs=gr.Video: 使用视频显示组件,标签为"上色后的视频"
2.5 启动应用
if __name__ == "__main__":
demo.launch(share=False)
demo.launch: 启动Gradio服务器share=False: 不创建公共链接,只在本地运行
三、完整代码
import gradio as gr
import os
import torch
import tempfile
from modelscope.outputs import OutputKeys
from modelscope.pipelines import pipeline
from modelscope.utils.constant import Tasks
# 添加安全全局变量设置
torch.serialization.add_safe_globals([slice])
# 设置临时目录
temp_dir = "D:/condaLearning/temp"
os.makedirs(temp_dir, exist_ok=True)
tempfile.tempdir = temp_dir
# 定义视频上色函数
def video_colorize(input_video):
# 在临时目录中创建输出文件路径
output_video_path = os.path.join(temp_dir, 'colored_video.mp4')
# 创建视频上色管道
colorizer = pipeline(Tasks.video_colorization, model='damo/cv_unet_video-colorization', device='cuda')
# 进行视频上色
result = colorizer(input_video)
# 保存上色后的视频到临时目录
# 直接返回结果中的视频路径,而不是尝试写入文件
return result[OutputKeys.OUTPUT_VIDEO]
# 创建Gradio界面
demo = gr.Interface(
fn=video_colorize,
inputs=gr.Video(label="上传黑白视频"),
outputs=gr.Video(label="上色后的视频"),
)
if __name__ == "__main__":
demo.launch(share=False)
四、效果展示
运行成功后,生成URL:http://127.0.0.1:7860

浏览器打开生成的URL:http://127.0.0.1:7860

打开准备好的黑白视频 
处理后的视频

五、问题与解决
问题一:ModuleNotFoundError: No module named ‘xxx’(下图为示例)

解决一:pip install xxx
#过程中遇到需要安装的依赖包
pip install gradio
pip install modelscope
pip install addict
pip install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu124
pip install datasets==3.3.0
pip install simplejson
pip install sortedcontainers
pip install opencv-python
pip install ffmpeg
问题二:ImportError: cannot import name ‘get_metadata_patterns’ from ‘datasets.data_files’ 
解决二:pip install datasets==3.3.0
问题三:PermissionError: [Errno 13] Permission denied: ‘D:\XXX\temp\gradio\09d4c3363b495e6c51b91b4c04a11b213ff48ceb3f09a20b7b46a238dfaf17ca\luomajiari.mp4’

解决三:按照报错信息,将路径下的mp4缓存的文件删除