USART

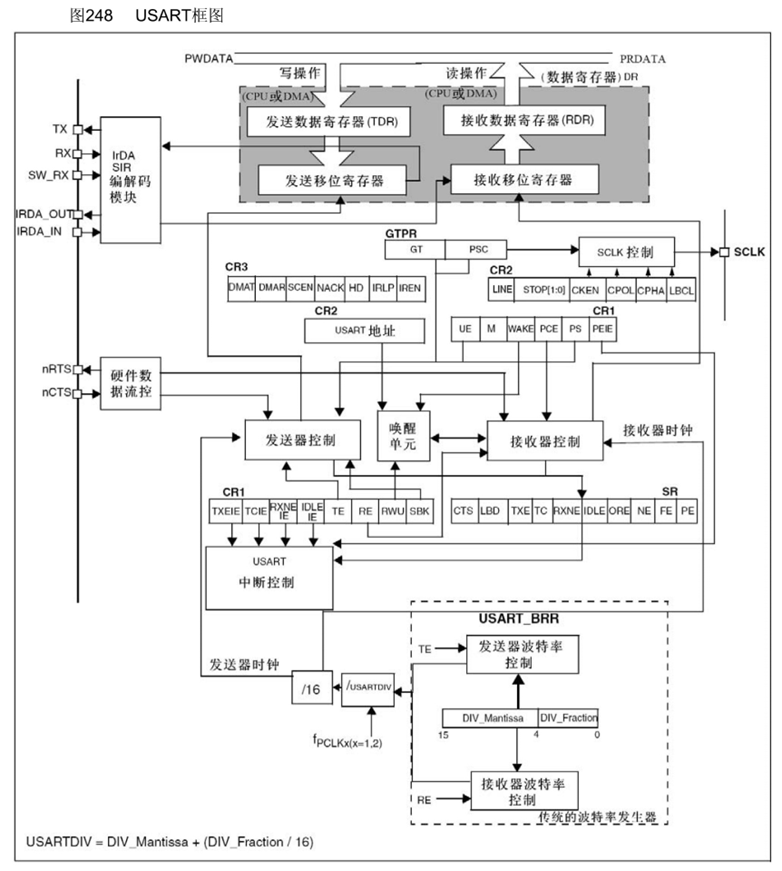
1. 引脚与接口层
- 异步引脚:
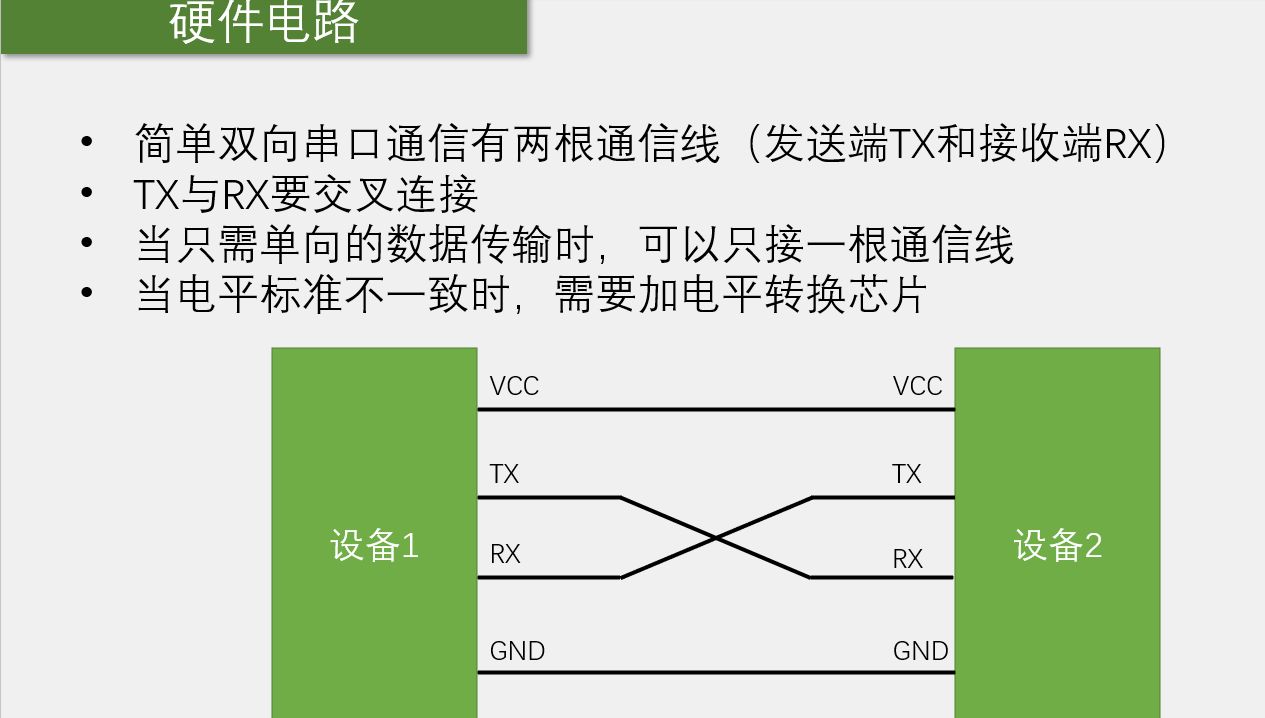
TX:发送数据输出;RX:接收数据输入;SW_RX:单线半双工模式的接收引脚(替代 RX)。
- 同步引脚:
SCLK:同步模式下的时钟输出(主模式)或输入(从模式)。 - IrDA 接口:
IrDA_OUT/IrDA_IN,配合编解码模块实现红外通信(需外接 IrDA 收发器)。 - 硬件流控引脚:
nRTS(请求发送,输出)、nCTS(清除发送,输入),协调收发双方速率。
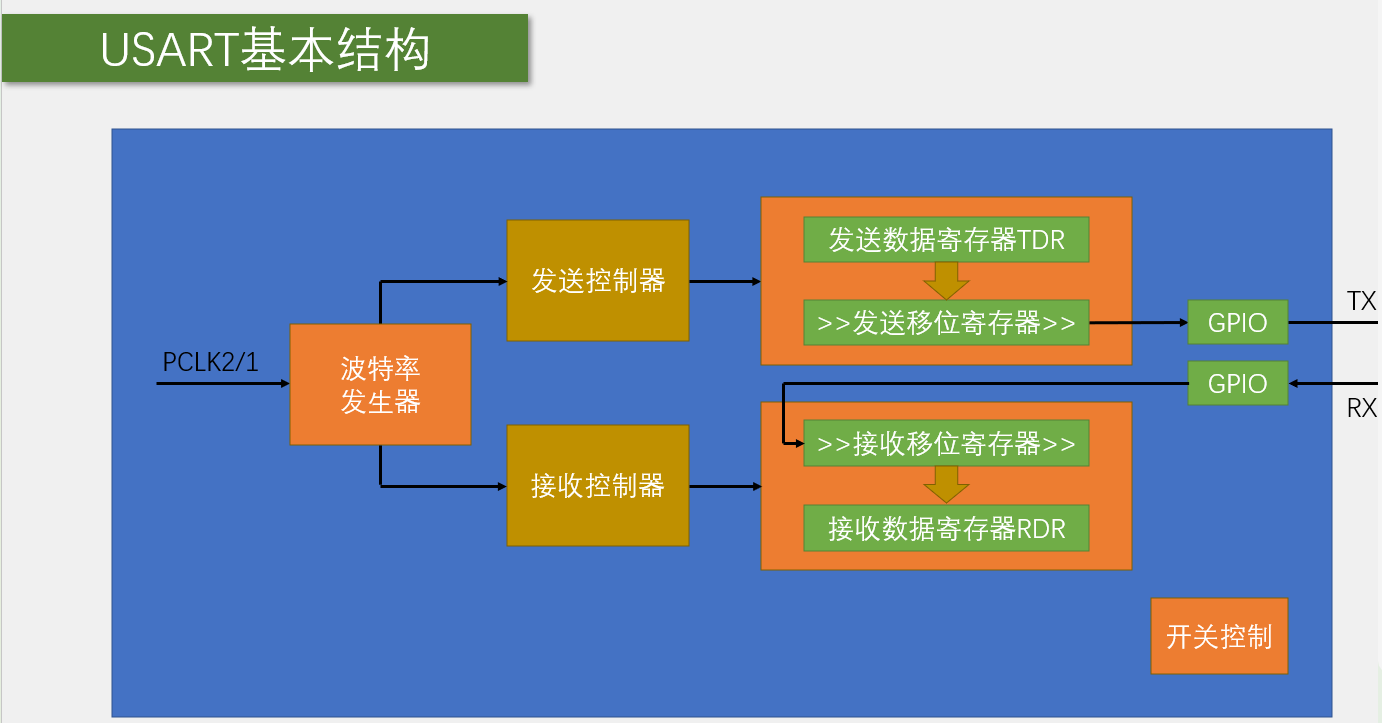
2. 数据收发核心:寄存器 + 移位寄存器
- 发送路径:
CPU/DMA → 写入 发送数据寄存器(TDR) → 送入 发送移位寄存器(并行→串行,逐位输出到 TX/IrDA/SW_RX)。 - 接收路径:
RX/IrDA/SW_RX 接收串行数据 → 送入 接收移位寄存器(串行→并行)→ 存入 接收数据寄存器(RDR) → 供 CPU/DMA 读取。 - 关键逻辑:移位寄存器负责 “串并转换”,TDR/RDR 作为数据缓冲(避免 CPU 频繁干预)。
3. 控制与配置:CR1/CR2/CR3 寄存器
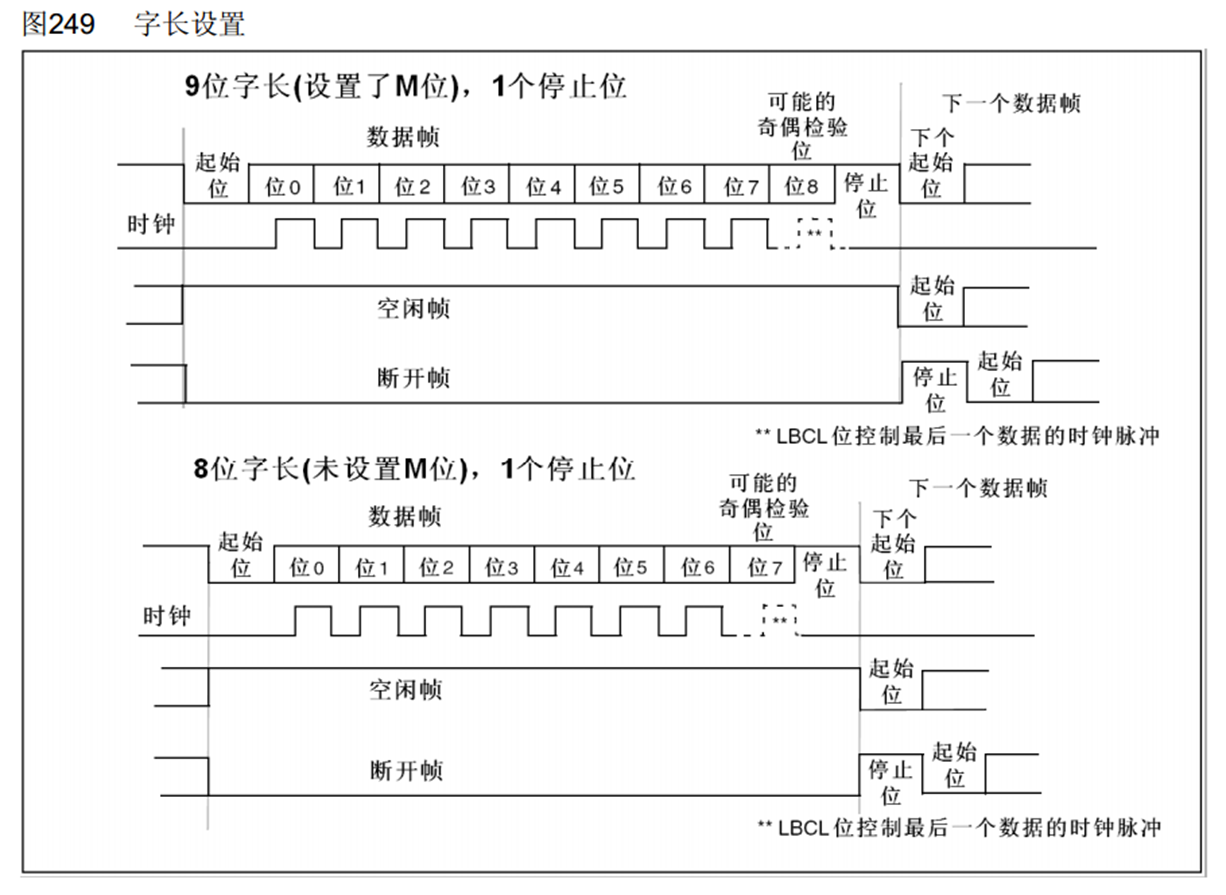
CR1:基础配置,如:
UE:USART 使能;M:字长(8/9 位);WAKE:唤醒模式(空闲线 / 地址标记);- 中断使能(
TXEIE 发送空、RXNEIE 接收非空、IDLEIE 总线空闲等)。
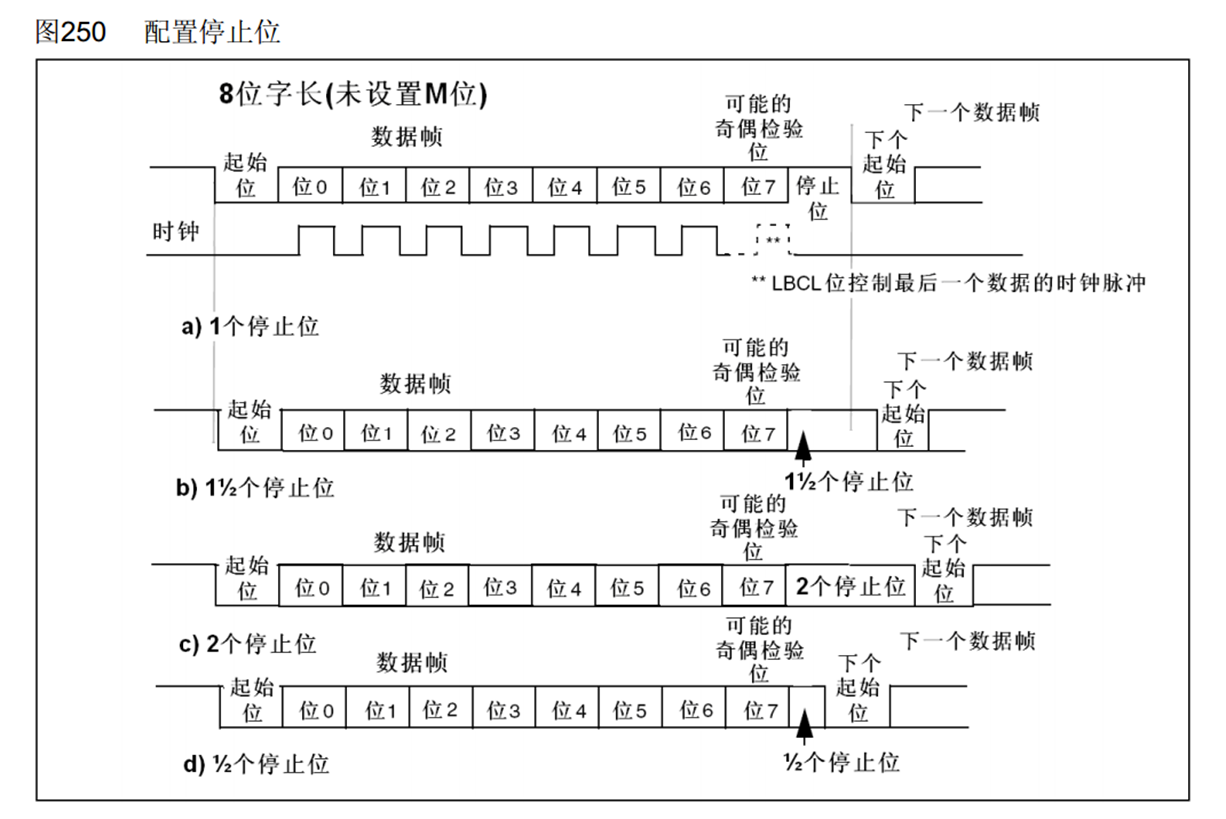
CR2:帧格式与同步控制,如:
STOP[1:0]:停止位数量(0.5/1/1.5/2 位);LINEN:LIN 总线模式;- 同步模式时钟配置(
CPOL 极性、CPHA 相位、CLKEN 时钟使能)。
CR3:高级功能,如:
DMA 使能(DMAT 发送 DMA、DMA 接收 DMA);- 硬件流控(
RTSE 使能 nRTS、CTSE 使能 nCTS); - 红外模式(
IREN)、半双工(HDSEL)等。
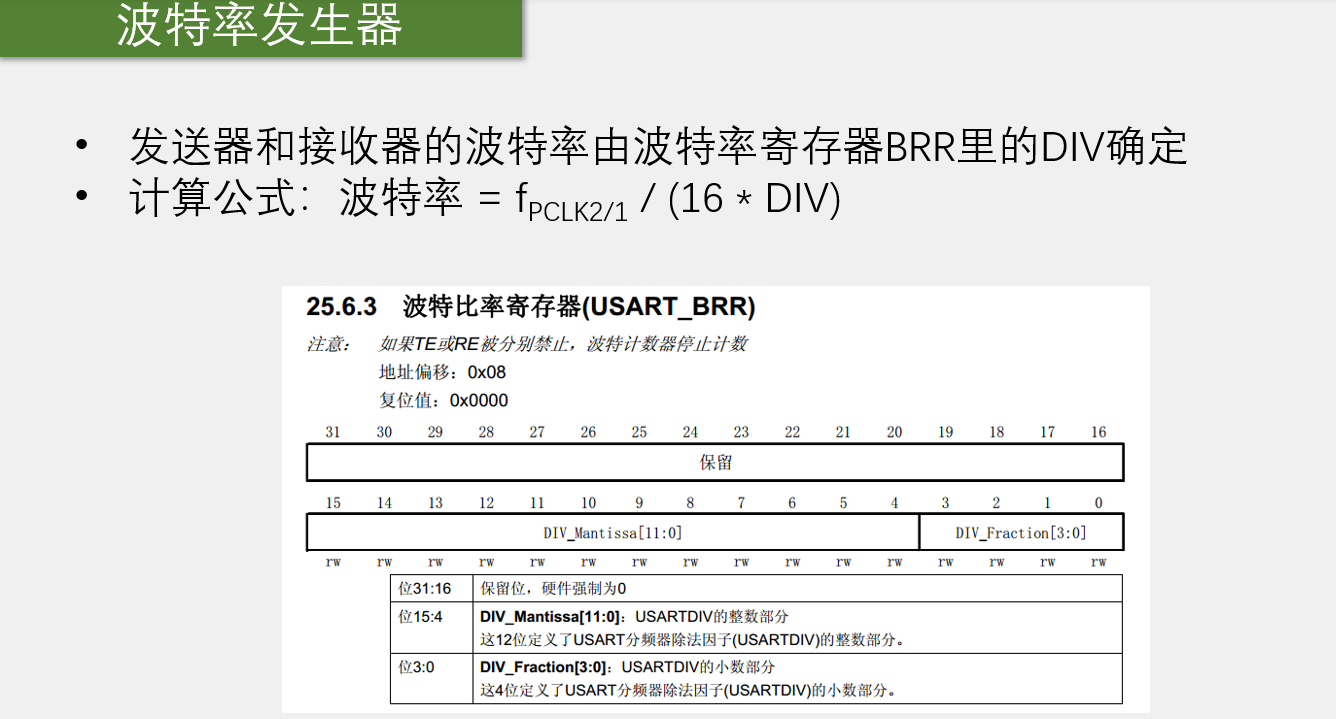
4. 波特率生成:USART_BRR 寄存器
- 核心公式:
USARTDIV=16×波特率fPCLK=DIV_Mantissa+16DIV_Fraction
fPCLK:USART 外设时钟(来自 RCC 配置);DIV_Mantissa:整数部分(15 位),DIV_Fraction:小数部分(4 位),共同决定波特率精度(如 9600、115200 等)。
- 时钟分配:生成的 USARTDIV 同时供给 发送器时钟 和 接收器时钟,保证收发同步。
5. 状态与中断:SR 寄存器 + 中断控制
- 状态标志(
SR):
TXE:发送数据寄存器空(可写入新数据);RXNE:接收数据寄存器非空(可读取数据);IDLE:总线空闲(异步模式下,用于检测一帧结束);- 错误标志:
OE(溢出)、PE(奇偶校验错)、FE(帧错)、NE(噪声错)。
- 中断控制:通过
CR1 使能对应中断(如 TXEIE 使能 TXE 中断),触发后进入 USART 中断控制模块,通知 CPU 处理。
串口发送
#include "stm32f10x.h" // Device header
#include "stdio.h"
#include "stdarg.h"
void Serial_Init()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
USART_InitTypeDef USART_InitStructrue;
USART_InitStructrue.USART_BaudRate=9600;
USART_InitStructrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructrue.USART_Mode=USART_Mode_Tx;
USART_InitStructrue.USART_Parity=USART_Parity_No;
USART_InitStructrue.USART_StopBits=USART_StopBits_1;
USART_InitStructrue.USART_WordLength=USART_WordLength_8b;
USART_Init(USART1,&USART_InitStructrue);
USART_Cmd(USART1,ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1,Byte);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
void Serial_SendArray(uint8_t *Array,uint16_t Length)
{
uint16_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for(i=0;String[i]!='\0';i++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X,uint32_t Y)
{
uint32_t Result;
while(Y--)
{
Result*=X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number,uint8_t Length)
{
uint8_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Number/Serial_Pow(10,Length-i-1)%10+'0');
}
}
int fputc(int ch,FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_printf(char *format,...)
{
char String[100];
va_list arg;
va_start(arg,format);
vsprintf(String,format,arg);
va_end(arg);
Serial_SendString(String);
}
串口发送+接收
#include "stm32f10x.h" // Device header
#include "stdio.h"
#include "stdarg.h"
uint8_t Serial_RxFlag;
uint8_t Serial_RxData;
void Serial_Init()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
USART_InitTypeDef USART_InitStructrue;
USART_InitStructrue.USART_BaudRate=9600;
USART_InitStructrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructrue.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;
USART_InitStructrue.USART_Parity=USART_Parity_No;
USART_InitStructrue.USART_StopBits=USART_StopBits_1;
USART_InitStructrue.USART_WordLength=USART_WordLength_8b;
USART_Init(USART1,&USART_InitStructrue);
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructrue;
NVIC_InitStructrue.NVIC_IRQChannel=USART1_IRQn;
NVIC_InitStructrue.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructrue.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStructrue.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStructrue);
USART_Cmd(USART1,ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1,Byte);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
void Serial_SendArray(uint8_t *Array,uint16_t Length)
{
uint16_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for(i=0;String[i]!='\0';i++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X,uint32_t Y)
{
uint32_t Result;
while(Y--)
{
Result*=X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number,uint8_t Length)
{
uint8_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Number/Serial_Pow(10,Length-i-1)%10+'0');
}
}
int fputc(int ch,FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_printf(char *format,...)
{
char String[100];
va_list arg;
va_start(arg,format);
vsprintf(String,format,arg);
va_end(arg);
Serial_SendString(String);
}
uint8_t Serial_GetRxFlag()
{
if(Serial_RxFlag==1)
{
Serial_RxFlag=0;
return 1;
}
return 0;
}
uint8_t Serial_GetRxData()
{
return Serial_RxData;
}
void USART1_IRQHandler()
{
if(USART_GetFlagStatus(USART1,USART_IT_RXNE)==SET)
{
Serial_RxData=USART_ReceiveData(USART1);
Serial_RxFlag=1;
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}
}
串口发送HEX数据包

#include "stm32f10x.h" // Device header
#include "stdio.h"
#include "stdarg.h"
uint8_t Serial_RxFlag;
uint8_t Serial_RxData;
uint8_t Serial_TxPacket[4];
uint8_t Serial_RxPacket[4];
void Serial_Init()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
USART_InitTypeDef USART_InitStructrue;
USART_InitStructrue.USART_BaudRate=9600;
USART_InitStructrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructrue.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;
USART_InitStructrue.USART_Parity=USART_Parity_No;
USART_InitStructrue.USART_StopBits=USART_StopBits_1;
USART_InitStructrue.USART_WordLength=USART_WordLength_8b;
USART_Init(USART1,&USART_InitStructrue);
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructrue;
NVIC_InitStructrue.NVIC_IRQChannel=USART1_IRQn;
NVIC_InitStructrue.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructrue.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStructrue.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStructrue);
USART_Cmd(USART1,ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1,Byte);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
void Serial_SendArray(uint8_t *Array,uint16_t Length)
{
uint16_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for(i=0;String[i]!='\0';i++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X,uint32_t Y)
{
uint32_t Result;
while(Y--)
{
Result*=X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number,uint8_t Length)
{
uint8_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Number/Serial_Pow(10,Length-i-1)%10+'0');
}
}
int fputc(int ch,FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_printf(char *format,...)
{
char String[100];
va_list arg;
va_start(arg,format);
vsprintf(String,format,arg);
va_end(arg);
Serial_SendString(String);
}
void Serial_SendPacket()
{
Serial_SendByte(0xFF);
Serial_SendArray(Serial_TxPacket,4);
Serial_SendByte(0xFE);
}
uint8_t Serial_GetRxFlag()
{
if(Serial_RxFlag==1)
{
Serial_RxFlag=0;
return 1;
}
return 0;
}
void USART1_IRQHandler()
{
static uint8_t RxState=0;
static uint8_t pRxPacket=0;
if(USART_GetFlagStatus(USART1,USART_IT_RXNE)==SET)
{
uint8_t RxData=USART_ReceiveData(USART1);
if(RxState==0)
{
if(RxData==0xFF)
{
RxState=1;
pRxPacket=0;
}
}
else if(RxState==1)
{
Serial_RxPacket[pRxPacket]=RxData;
pRxPacket++;
if(pRxPacket>=4)
{
RxState=2;
}
}
else if(RxState==2)
{
if(RxData==0xFE)
{
RxState=0;
Serial_RxFlag=1;
}
}
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}
}
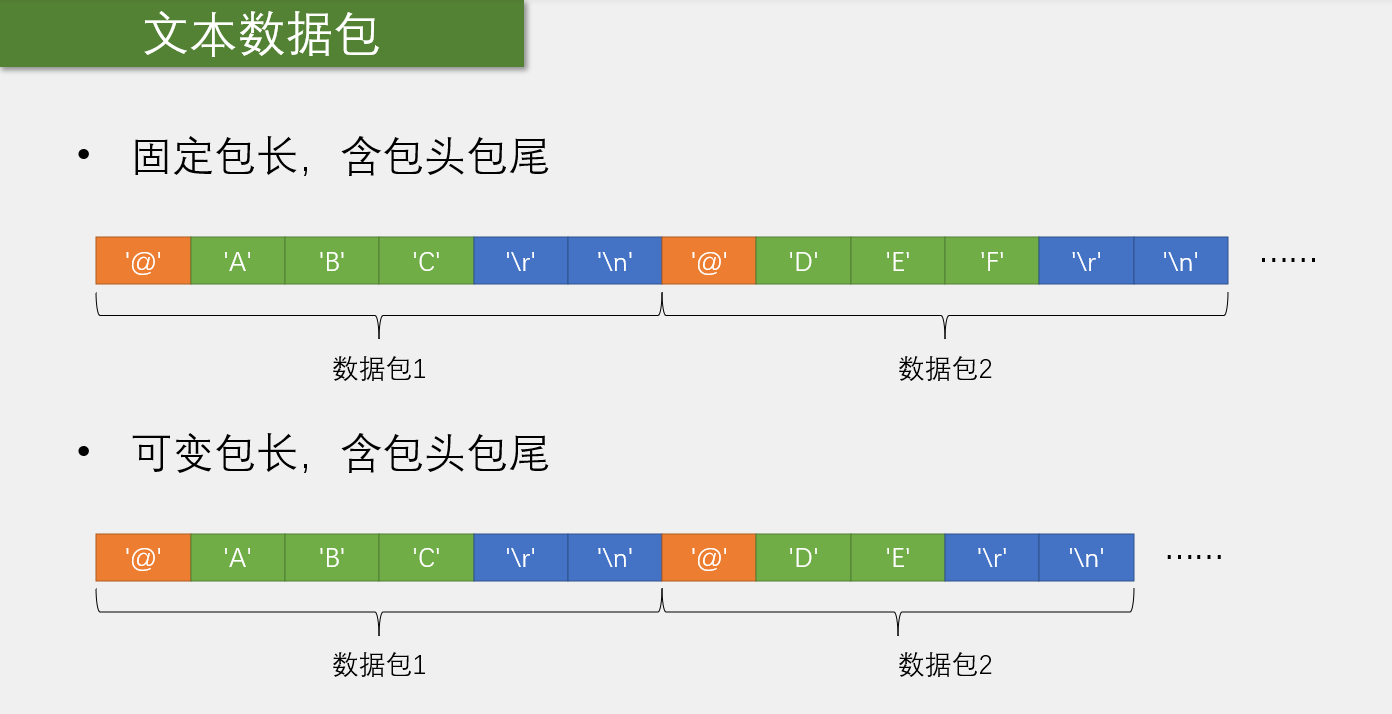
串口发送文本数据包
#include "stm32f10x.h" // Device header
#include "stdio.h"
#include "stdarg.h"
uint8_t Serial_RxFlag;
uint8_t Serial_RxData;
char Serial_RxPacket[100];
void Serial_Init()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
USART_InitTypeDef USART_InitStructrue;
USART_InitStructrue.USART_BaudRate=9600;
USART_InitStructrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructrue.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;
USART_InitStructrue.USART_Parity=USART_Parity_No;
USART_InitStructrue.USART_StopBits=USART_StopBits_1;
USART_InitStructrue.USART_WordLength=USART_WordLength_8b;
USART_Init(USART1,&USART_InitStructrue);
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructrue;
NVIC_InitStructrue.NVIC_IRQChannel=USART1_IRQn;
NVIC_InitStructrue.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructrue.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStructrue.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStructrue);
USART_Cmd(USART1,ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1,Byte);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
void Serial_SendArray(uint8_t *Array,uint16_t Length)
{
uint16_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for(i=0;String[i]!='\0';i++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X,uint32_t Y)
{
uint32_t Result;
while(Y--)
{
Result*=X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number,uint8_t Length)
{
uint8_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Number/Serial_Pow(10,Length-i-1)%10+'0');
}
}
int fputc(int ch,FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_printf(char *format,...)
{
char String[100];
va_list arg;
va_start(arg,format);
vsprintf(String,format,arg);
va_end(arg);
Serial_SendString(String);
}
void USART1_IRQHandler()
{
static uint8_t RxState=0;
static uint8_t pRxPacket=0;
if(USART_GetFlagStatus(USART1,USART_IT_RXNE)==SET)
{
uint8_t RxData=USART_ReceiveData(USART1);
if(RxState==0)
{
if(RxData=='@'&&Serial_RxFlag==0)
{
RxState=1;
pRxPacket=0;
}
}
else if(RxState==1)
{
if(RxData=='\r')
{
RxState=2;
}
else
{
Serial_RxPacket[pRxPacket]=RxData;
pRxPacket++;
}
}
else if(RxState==2)
{
if(RxData=='\n')
{
RxState=0;
Serial_RxFlag=1;
Serial_RxPacket[pRxPacket]='\0';
}
}
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}
}