论文信息
标题: DarkIR: Robust Low-Light Image Restoration
作者: Daniel Feijoo, Juan C. Benito, Alvaro Garcia, Marcos Conde
论文链接:https://arxiv.org/pdf/2412.13443
GitHub链接:https://github.com/cidautai/DarkIR
创新点
DarkIR提出了一种新的卷积神经网络(CNN)框架,旨在同时处理低光图像增强和去模糊任务。与现有方法通常分开处理这两项任务不同,DarkIR通过多任务学习的方式,利用图像退化之间的相关性来提高恢复效果。该模型在参数和计算量上均优于之前的方法,且在多个标准数据集(如LOLBlur、LOLv2和Real-LOLBlur)上取得了新的最先进结果。
方法
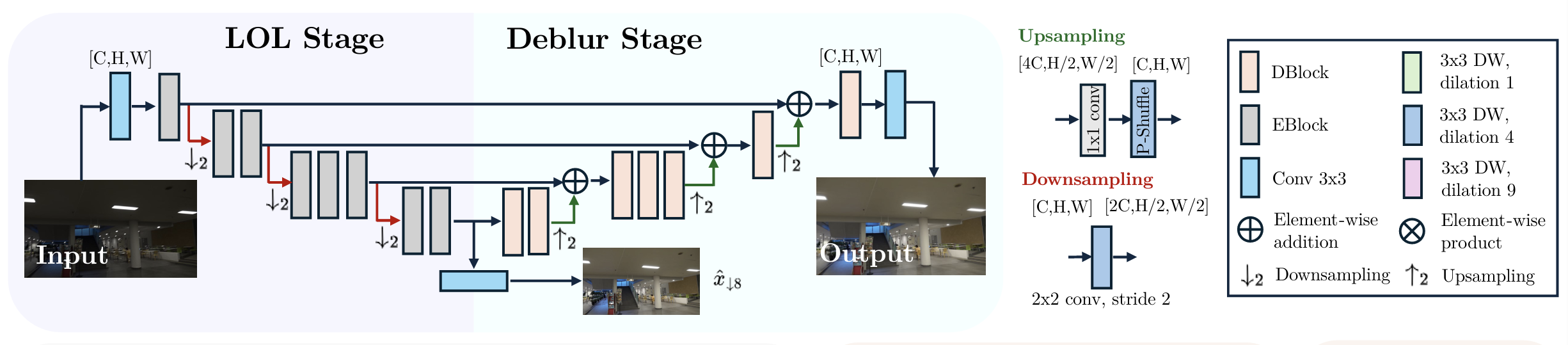
DarkIR的架构采用了编码器-解码器设计,主要包括以下几个部分:
- 编码器块(EBlock): 主要在频域中改善低光条件,使用快速傅里叶变换(FFT)增强输入图像的幅度。 通过空间注意模块(SpAM)增强特征提取,确保网络能够关注重要的空间信息。
- 解码器块(DBlock): 负责上采样编码器的低分辨率输出并减少模糊。 实现了膨胀空间注意模块(Di-SpAM),通过不同膨胀率的深度卷积捕捉多种感受野的特征。该方法结合了频域技术和创新的注意力机制,优化了低光图像的恢复过程。
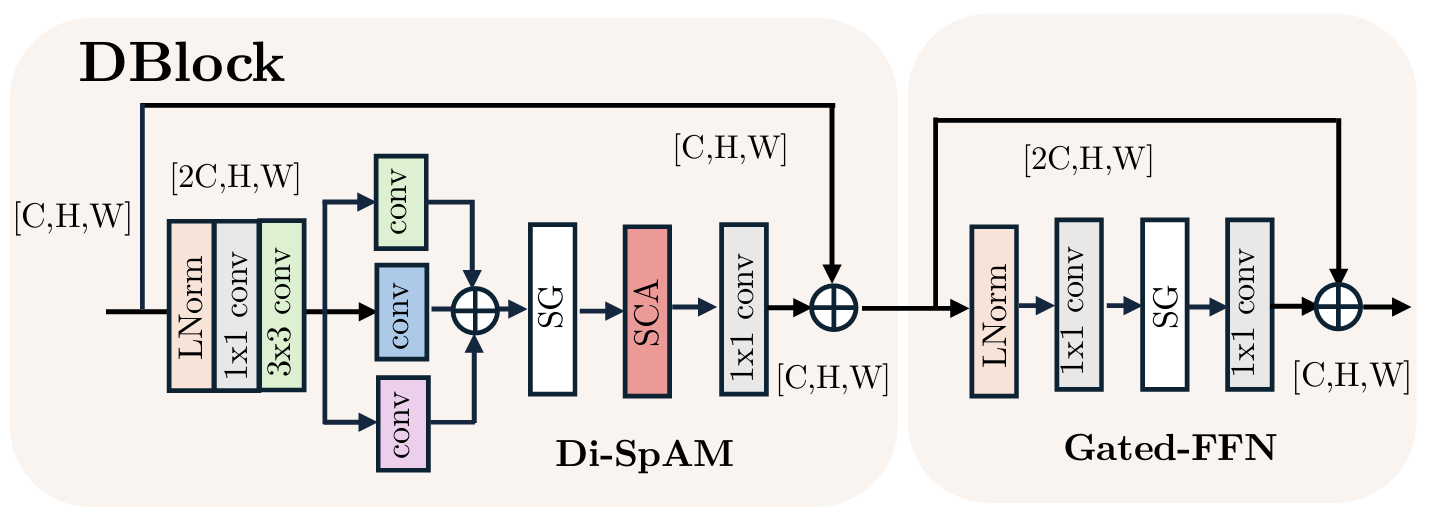
DBlock模块详解
**DBlock(解码器块)**是DarkIR模型中的重要组成部分,主要负责从编码器传递的特征中恢复高分辨率的清晰图像。其设计旨在有效地处理低光照条件下的图像模糊问题,具体实现如下:
1. 结构组成
DBlock的主要组成部分包括:
- 深度卷积(Dilated Convolution): DBlock利用多种膨胀因子的深度卷积来增大感受野,从而更好地捕捉图像中的细节和上下文信息。
- 空间注意力模块(SCA): 该模块用于增强特征的空间表示,确保网络能够关注到图像中的重要区域。
- 门控机制(SimpleGate): 通过门控机制对特征进行加权,进一步提升解码效果。
2. 工作原理
DBlock的工作流程如下:
- 输入处理: DBlock接收来自编码器的特征图,并进行Layer Normalization以提高训练的稳定性。
- 特征融合: 通过多个分支的深度卷积,DBlock能够在不同的膨胀率下捕捉多尺度的空间信息。各分支的输出通过门控机制进行融合,以增强特征的表达能力。
- 上采样:DBlock执行上采样操作,将低分辨率特征图转换为高分辨率图像。通过1x1卷积层恢复到原始通道数,并与输入进行残差连接,以保持信息的完整性。
DBlock通过结合多种膨胀卷积和空间注意力机制,显著提高了低光照条件下图像的清晰度和细节恢复能力。其设计不仅提升了图像的质量,还有效减少了模糊,使得DarkIR在多个标准数据集上表现出色,达到了新的最先进结果。
效果
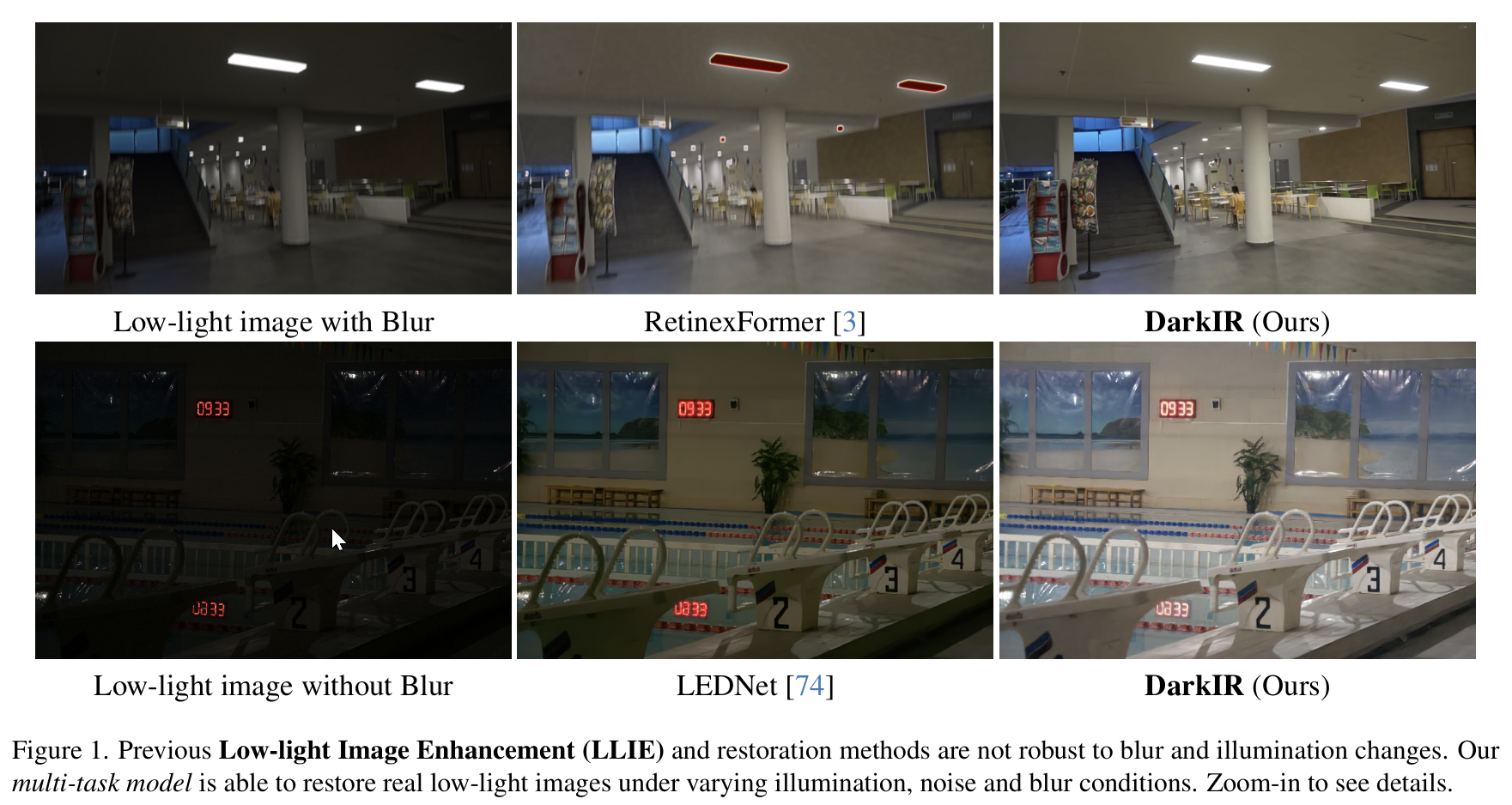
DarkIR在真实世界的夜间和暗光图像中表现出色,能够有效地减少噪声和模糊,同时保持高保真度。其在多个数据集上的表现超越了现有的最先进技术,展示了其在计算摄影、智能手机等资源受限设备上的应用潜力。
完整代码
import torch
import torch.nn as nn
class LayerNormFunction(torch.autograd.Function):
@staticmethod
def forward(ctx, x, weight, bias, eps):
ctx.eps = eps
N, C, H, W = x.size()
mu = x.mean(1, keepdim=True)
var = (x - mu).pow(2).mean(1, keepdim=True)
y = (x - mu) / (var + eps).sqrt()
ctx.save_for_backward(y, var, weight)
y = weight.view(1, C, 1, 1) * y + bias.view(1, C, 1, 1)
return y
@staticmethod
def backward(ctx, grad_output):
eps = ctx.eps
N, C, H, W = grad_output.size()
y, var, weight = ctx.saved_variables
g = grad_output * weight.view(1, C, 1, 1)
mean_g = g.mean(dim=1, keepdim=True)
mean_gy = (g * y).mean(dim=1, keepdim=True)
gx = 1. / torch.sqrt(var + eps) * (g - y * mean_gy - mean_g)
return gx, (grad_output * y).sum(dim=3).sum(dim=2).sum(dim=0), grad_output.sum(dim=3).sum(dim=2).sum(
dim=0), None
class LayerNorm2d(nn.Module):
def __init__(self, channels, eps=1e-6):
super(LayerNorm2d, self).__init__()
self.register_parameter('weight', nn.Parameter(torch.ones(channels)))
self.register_parameter('bias', nn.Parameter(torch.zeros(channels)))
self.eps = eps
def forward(self, x):
return LayerNormFunction.apply(x, self.weight, self.bias, self.eps)
class SimpleGate(nn.Module):
def forward(self, x):
x1, x2 = x.chunk(2, dim=1)
return x1 * x2
class Adapter(nn.Module):
def __init__(self, c, ffn_channel=None):
super().__init__()
if ffn_channel:
ffn_channel = 2
else:
ffn_channel = c
self.conv1 = nn.Conv2d(in_channels=c, out_channels=ffn_channel, kernel_size=1, padding=0, stride=1, groups=1,
bias=True)
self.conv2 = nn.Conv2d(in_channels=ffn_channel, out_channels=c, kernel_size=1, padding=0, stride=1, groups=1,
bias=True)
self.depthwise = nn.Conv2d(in_channels=c, out_channels=ffn_channel, kernel_size=3, padding=1, stride=1,
groups=c, bias=True, dilation=1)
def forward(self, input):
x = self.conv1(input) + self.depthwise(input)
x = self.conv2(x)
return x
class FreMLP(nn.Module):
def __init__(self, nc, expand=2):
super(FreMLP, self).__init__()
self.process1 = nn.Sequential(
nn.Conv2d(nc, expand * nc, 1, 1, 0),
nn.LeakyReLU(0.1, inplace=True),
nn.Conv2d(expand * nc, nc, 1, 1, 0))
def forward(self, x):
_, _, H, W = x.shape
x_freq = torch.fft.rfft2(x, norm='backward')
mag = torch.abs(x_freq)
pha = torch.angle(x_freq)
mag = self.process1(mag)
real = mag * torch.cos(pha)
imag = mag * torch.sin(pha)
x_out = torch.complex(real, imag)
x_out = torch.fft.irfft2(x_out, s=(H, W), norm='backward')
return x_out
class Branch(nn.Module):
'''
Branch that lasts lonly the dilated convolutions
'''
def __init__(self, c, DW_Expand, dilation=1):
super().__init__()
self.dw_channel = DW_Expand * c
self.branch = nn.Sequential(
nn.Conv2d(in_channels=self.dw_channel, out_channels=self.dw_channel, kernel_size=3, padding=dilation,
stride=1, groups=self.dw_channel,
bias=True, dilation=dilation) # the dconv
)
def forward(self, input):
return self.branch(input)
class DBlock(nn.Module):
'''
Change this block using Branch
'''
def __init__(self, c, DW_Expand=2, FFN_Expand=2, dilations=[1], extra_depth_wise=False):
super().__init__()
# we define the 2 branches
self.dw_channel = DW_Expand * c
self.conv1 = nn.Conv2d(in_channels=c, out_channels=self.dw_channel, kernel_size=1, padding=0, stride=1,
groups=1, bias=True, dilation=1)
self.extra_conv = nn.Conv2d(self.dw_channel, self.dw_channel, kernel_size=3, padding=1, stride=1, groups=c,
bias=True, dilation=1) if extra_depth_wise else nn.Identity() # optional extra dw
self.branches = nn.ModuleList()
for dilation in dilations:
self.branches.append(Branch(self.dw_channel, DW_Expand=1, dilation=dilation))
assert len(dilations) == len(self.branches)
self.dw_channel = DW_Expand * c
self.sca = nn.Sequential(
nn.AdaptiveAvgPool2d(1),
nn.Conv2d(in_channels=self.dw_channel // 2, out_channels=self.dw_channel // 2, kernel_size=1, padding=0,
stride=1,
groups=1, bias=True, dilation=1),
)
self.sg1 = SimpleGate()
self.sg2 = SimpleGate()
self.conv3 = nn.Conv2d(in_channels=self.dw_channel // 2, out_channels=c, kernel_size=1, padding=0, stride=1,
groups=1, bias=True, dilation=1)
ffn_channel = FFN_Expand * c
self.conv4 = nn.Conv2d(in_channels=c, out_channels=ffn_channel, kernel_size=1, padding=0, stride=1, groups=1,
bias=True)
self.conv5 = nn.Conv2d(in_channels=ffn_channel // 2, out_channels=c, kernel_size=1, padding=0, stride=1,
groups=1, bias=True)
self.norm1 = LayerNorm2d(c)
self.norm2 = LayerNorm2d(c)
self.gamma = nn.Parameter(torch.zeros((1, c, 1, 1)), requires_grad=True)
self.beta = nn.Parameter(torch.zeros((1, c, 1, 1)), requires_grad=True)
def forward(self, inp):
y = inp
x = self.norm1(inp)
# x = self.conv1(self.extra_conv(x))
x = self.extra_conv(self.conv1(x))
z = 0
for branch in self.branches:
z += branch(x)
z = self.sg1(z)
x = self.sca(z) * z
x = self.conv3(x)
y = inp + self.beta * x
# second step
x = self.conv4(self.norm2(y)) # size [B, 2*C, H, W]
x = self.sg2(x) # size [B, C, H, W]
x = self.conv5(x) # size [B, C, H, W]
x = y + x * self.gamma
return x
class EBlock(nn.Module):
'''
Change this block using Branch
'''
def __init__(self, c, DW_Expand=2, dilations = [1], extra_depth_wise=False):
super().__init__()
# we define the 2 branches
self.dw_channel = DW_Expand * c
self.extra_conv = nn.Conv2d(c, c, kernel_size=3, padding=1, stride=1, groups=c, bias=True,
dilation=1) if extra_depth_wise else nn.Identity() # optional extra dw
self.conv1 = nn.Conv2d(in_channels=c, out_channels=self.dw_channel, kernel_size=1, padding=0, stride=1,
groups=1, bias=True, dilation=1)
self.branches = nn.ModuleList()
for dilation in dilations:
self.branches.append(Branch(c, DW_Expand, dilation=dilation))
assert len(dilations) == len(self.branches)
self.dw_channel = DW_Expand * c
self.sca = nn.Sequential(
nn.AdaptiveAvgPool2d(1),
nn.Conv2d(in_channels=self.dw_channel // 2, out_channels=self.dw_channel // 2, kernel_size=1, padding=0,
stride=1,
groups=1, bias=True, dilation=1),
)
self.sg1 = SimpleGate()
self.conv3 = nn.Conv2d(in_channels=self.dw_channel // 2, out_channels=c, kernel_size=1, padding=0, stride=1,
groups=1, bias=True, dilation=1)
# second step
self.norm1 = LayerNorm2d(c)
self.norm2 = LayerNorm2d(c)
self.freq = FreMLP(nc=c, expand=2)
self.gamma = nn.Parameter(torch.zeros((1, c, 1, 1)), requires_grad=True)
self.beta = nn.Parameter(torch.zeros((1, c, 1, 1)), requires_grad=True)
def forward(self, inp):
y = inp
x = self.norm1(inp)
x = self.conv1(self.extra_conv(x))
z = 0
for branch in self.branches:
z += branch(x)
z = self.sg1(z)
x = self.sca(z) * z
x = self.conv3(x)
y = inp + self.beta * x
# second step
x_step2 = self.norm2(y) # size [B, 2*C, H, W]
x_freq = self.freq(x_step2) # size [B, C, H, W]
x = y * x_freq
x = y + x * self.gamma
return x
if __name__ == "__main__":
# 定义输入张量大小(Batch、Channel、Height、Wight)
B, C, H, W = 16, 64, 8, 8
input_tensor = torch.randn(B,C,H,W) # 随机生成输入张量
dim=C
# 创建 DynamicTanh 实例
block = DBlock(dim,dilations=[1, 4, 9])
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
block = block.to(device)
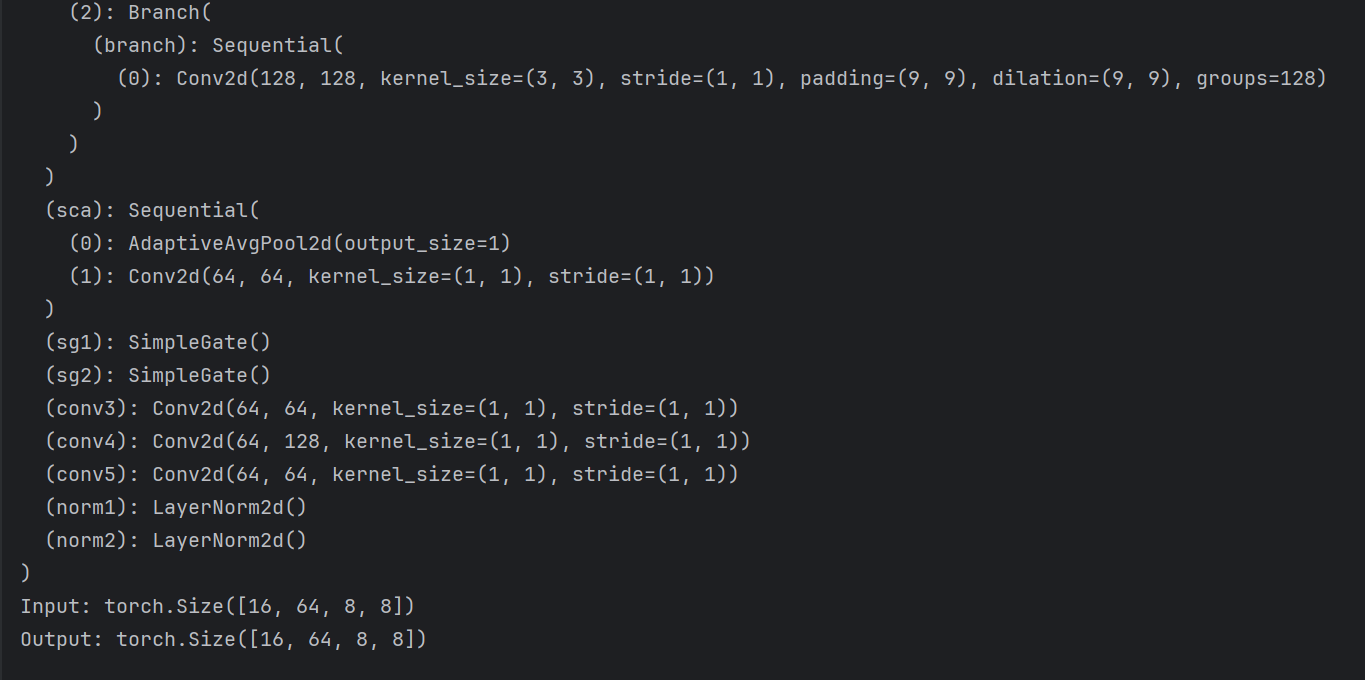
print(block)
input_tensor = input_tensor.to(device)
# 执行前向传播
output = block(input_tensor)
# 打印输入和输出的形状
print(f"Input: {input_tensor.shape}")
print(f"Output: {output.shape}")