0 引言
在使用飞马D2000无人机搭载LiDAR500进行作业完成后,需要对数据进行预处理,方便给内业人员开展点云分类等工作。在开始操作前,先了解一下使用的软硬件及整体流程。
0.1 外业测量设备
- 无人机:飞马D2000S
- 激光模块:LiDAR500
0.2 点云预处理软件

0.3 原始数据
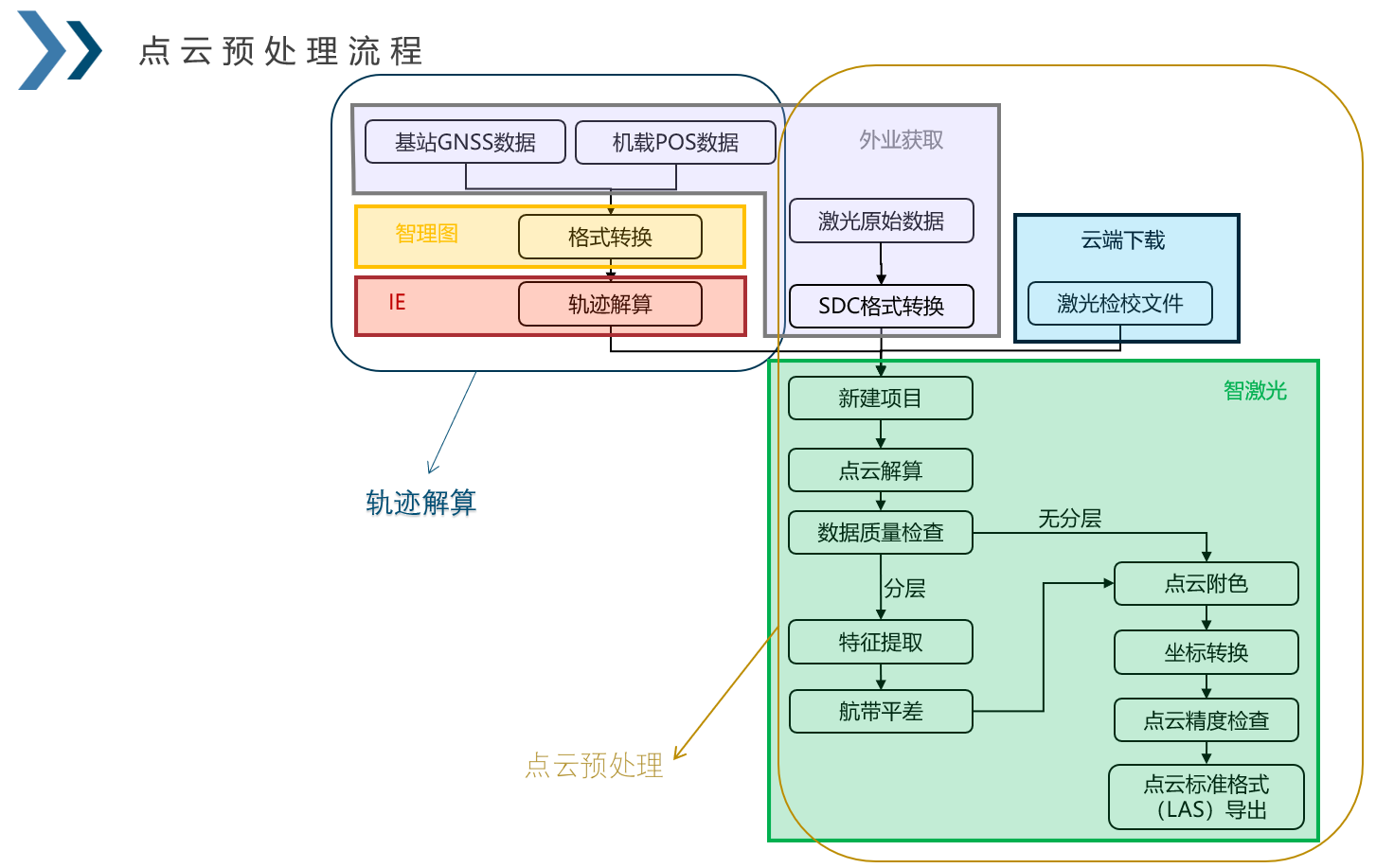
0.4 点云预处理流程
1 外业数据准备
将飞马D2000S和LiDAR500进行组装,利用无人机管家进行规划和飞行获取原始数据。

2 POS解算(飞马无人机管家)
对下载的POS数据(在智飞行里面连接飞机下载)进行POS解算。
2.1 打开智理图

2.1.1 GNSS格式转换
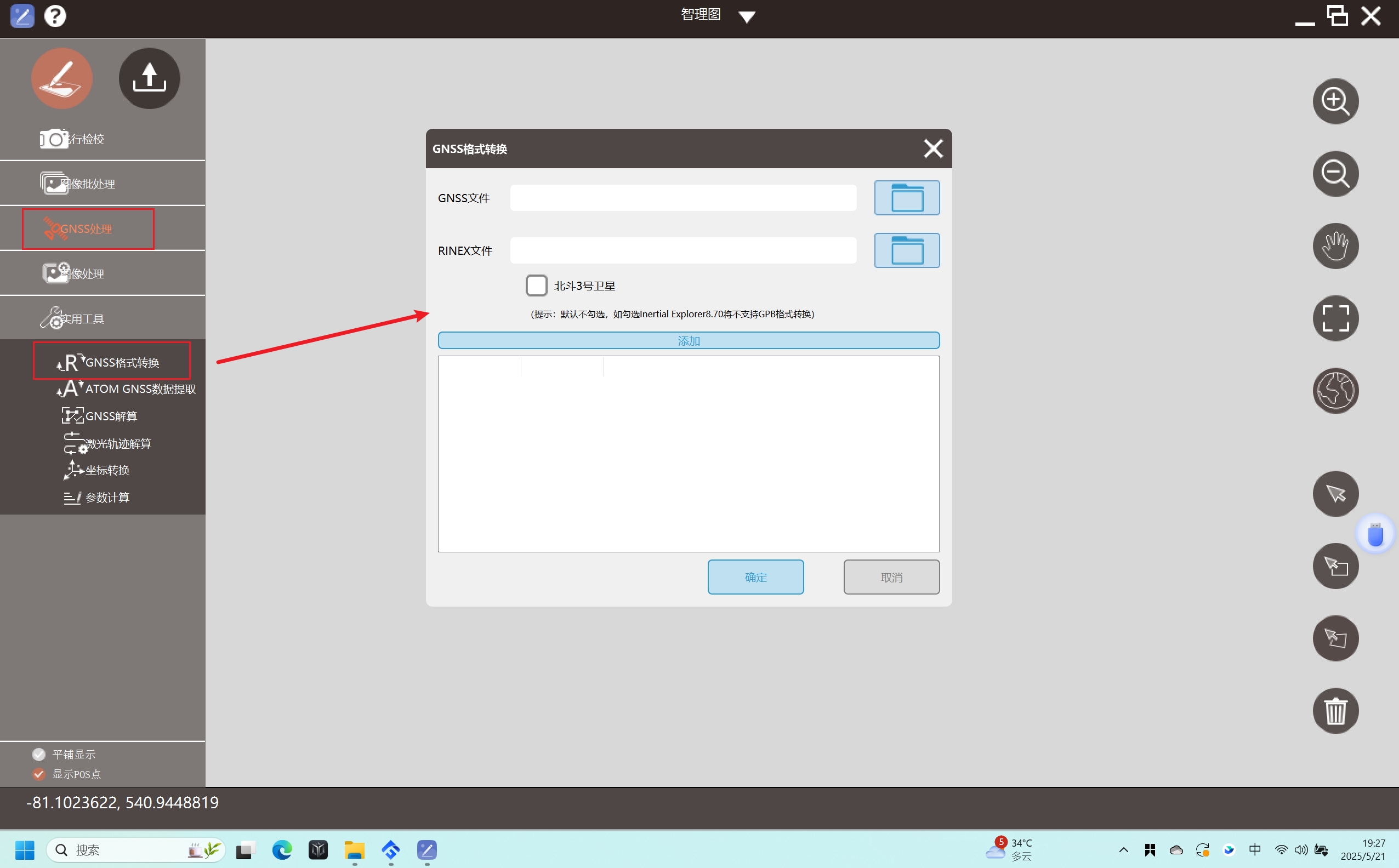
添加GNSS数据(可以一次性添加多架次)
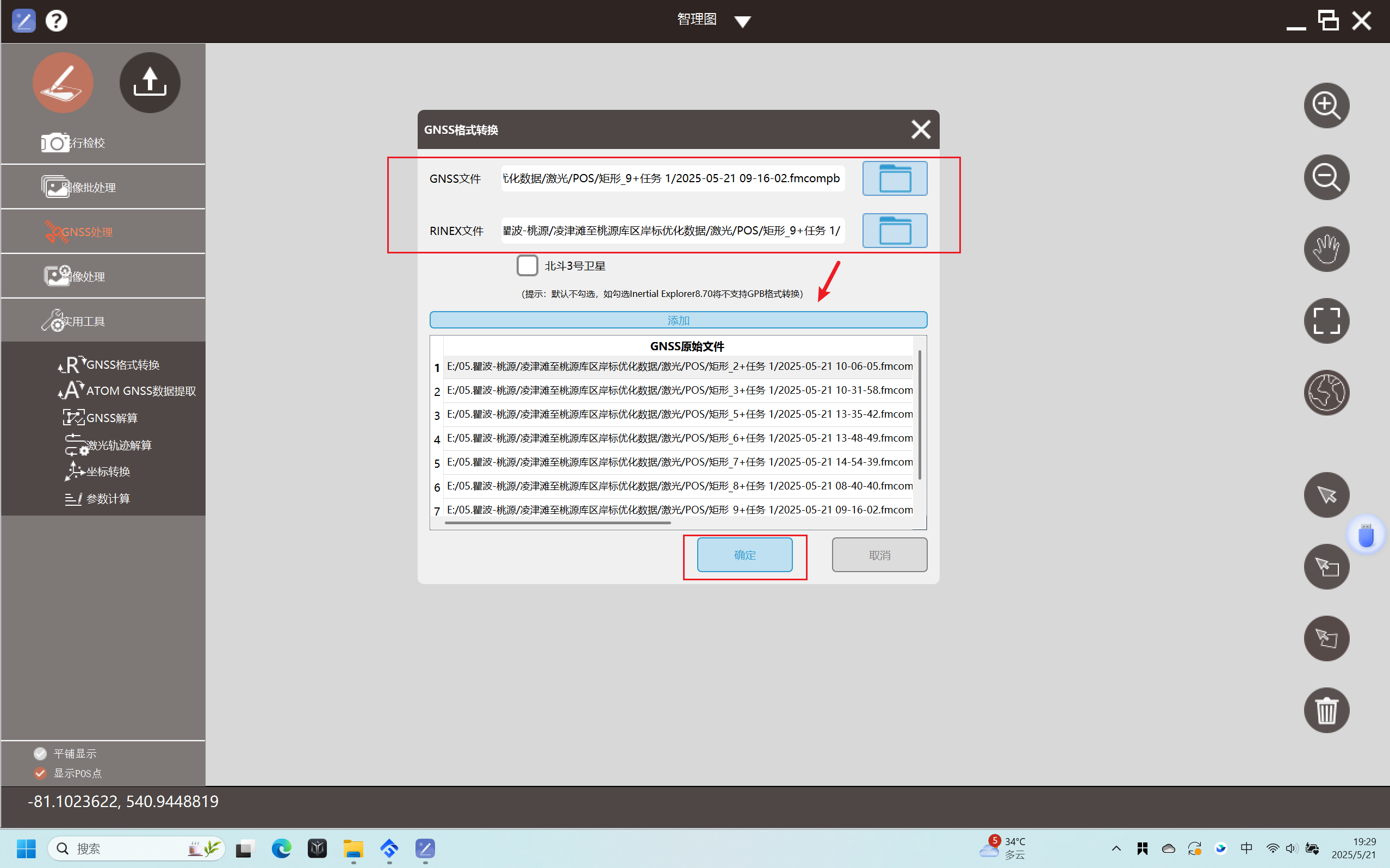
点击确定
2.2 GNSS解算
选择观测文件(转换后的***.O文件)
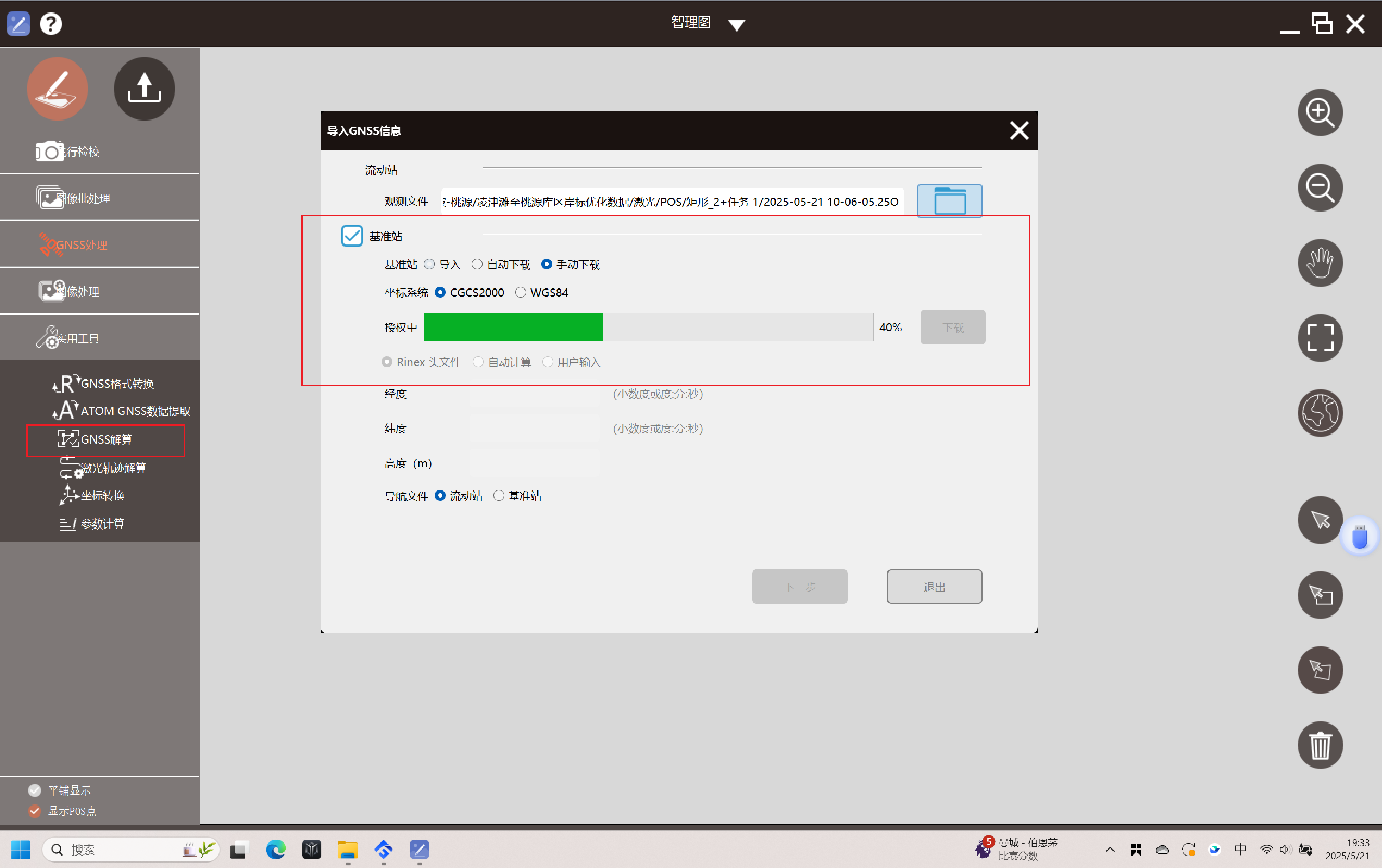
勾选基准站,选择手动下载,点击下载。

- 解算方式:融合
- RTK轨迹:选择RTK轨迹文件
- 保持路径:选择保存路径文件夹
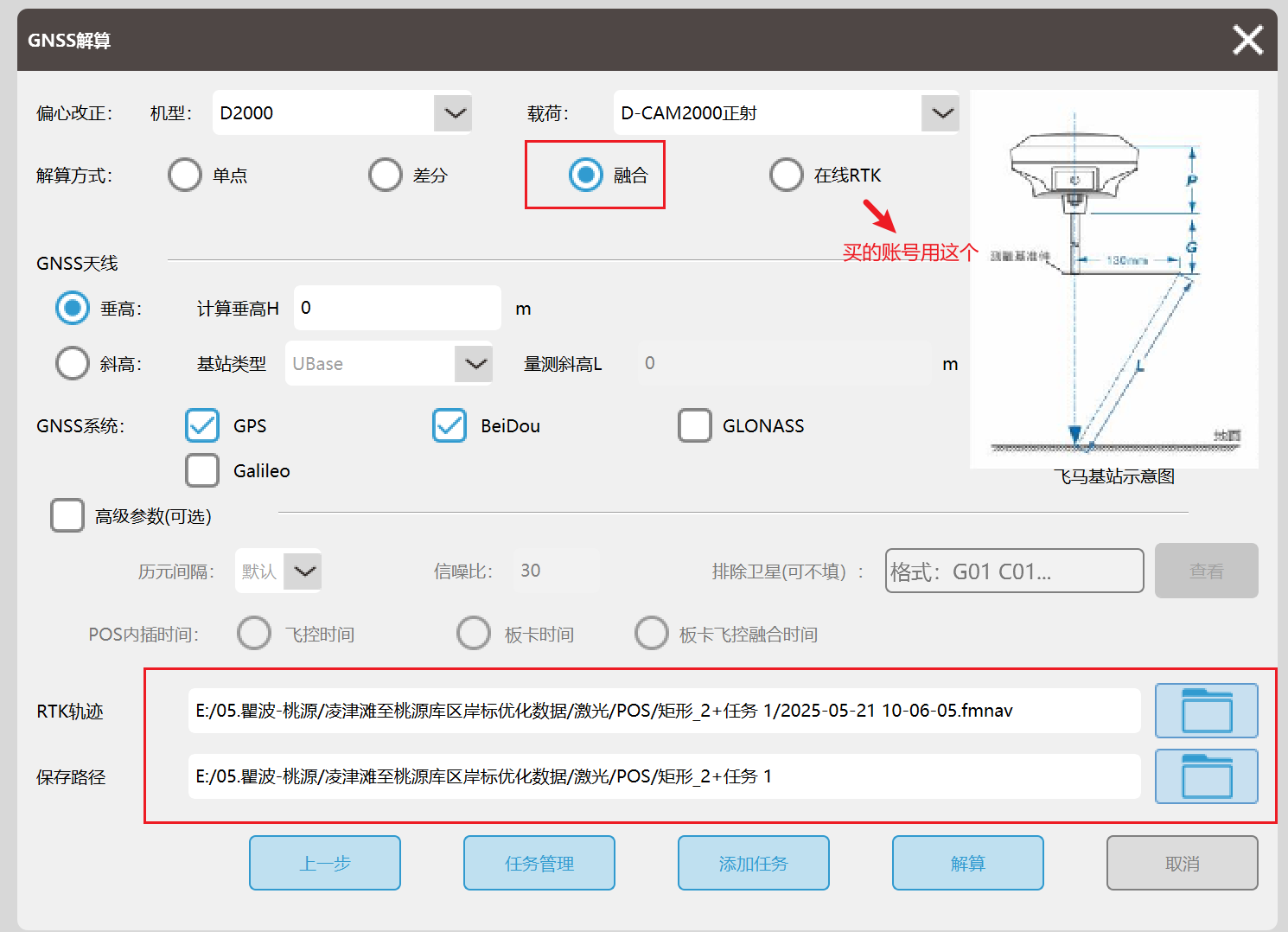
点击解算

3 点云轨迹解算(Inertial Explorer)
路径尽量都用英文
3.1 新建项目
File --> Empty Project
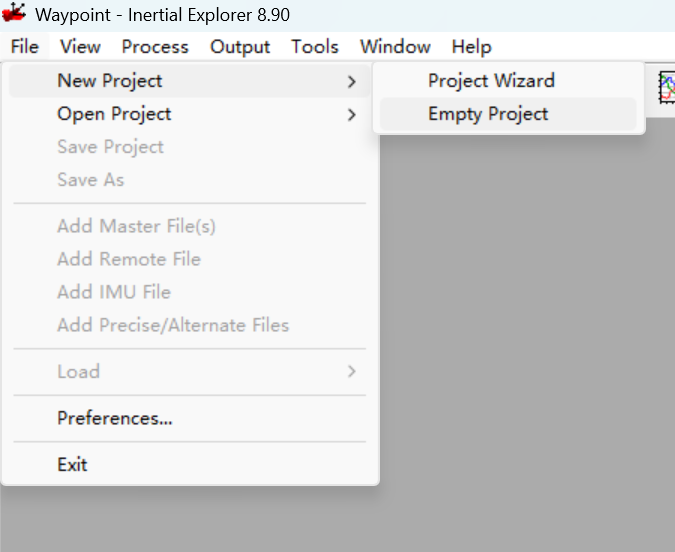
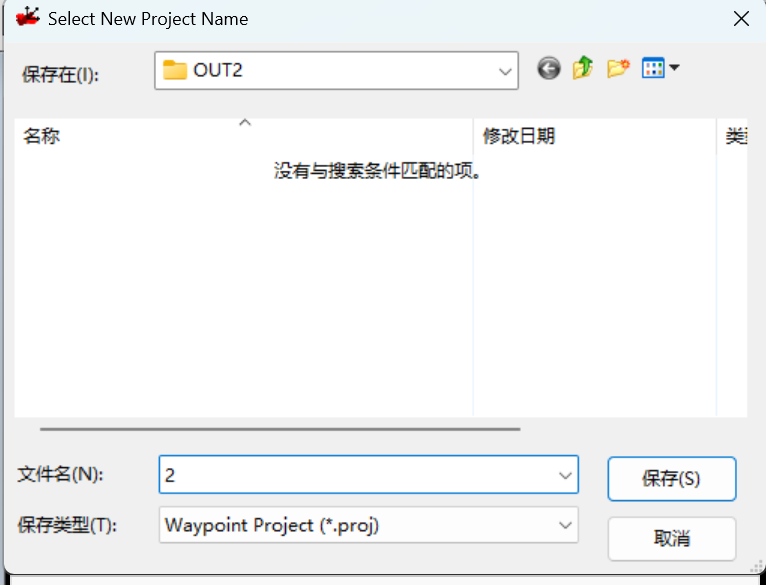
选择路径,设置文件名
3.2 数据转换
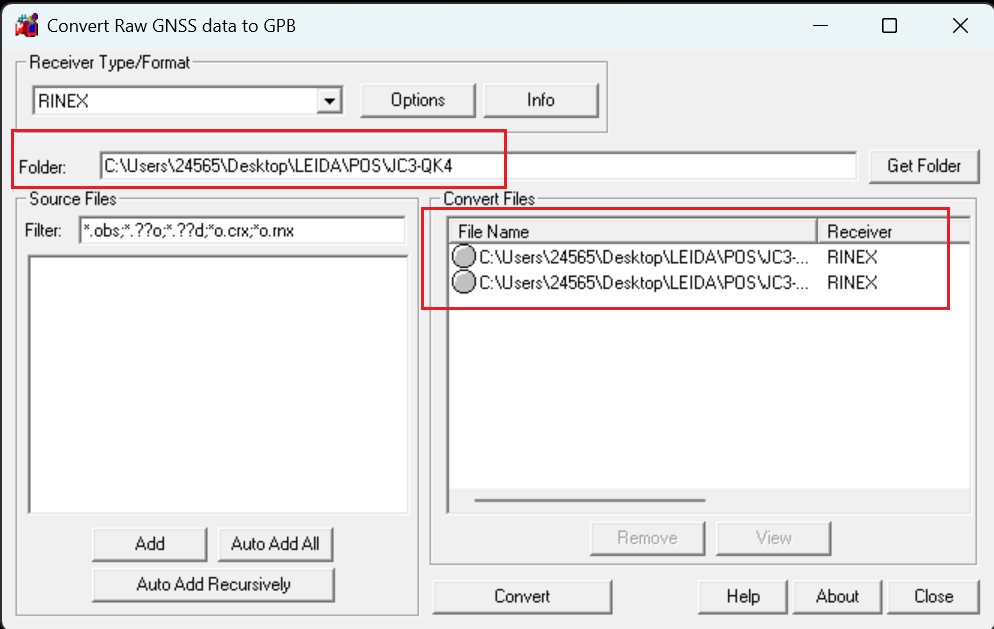
Tool --> Convert Raw GNSS to GPB
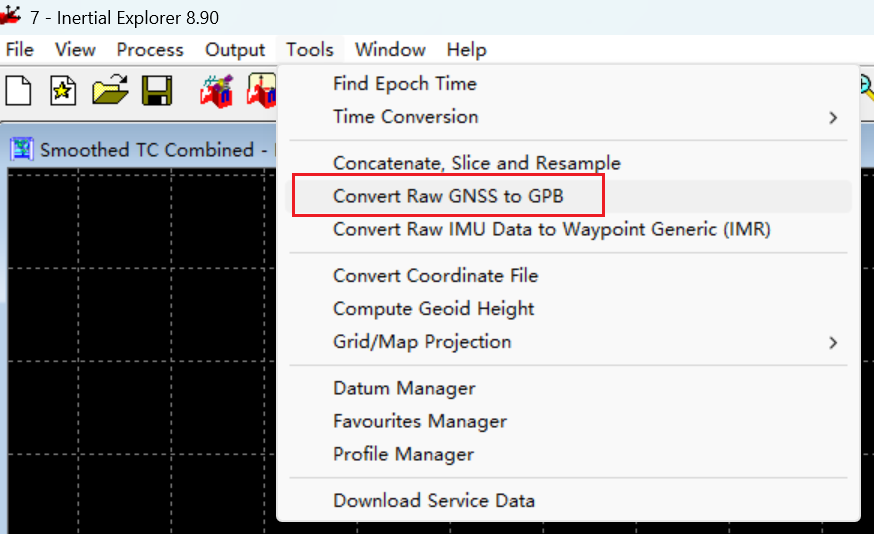
添加基准站数据
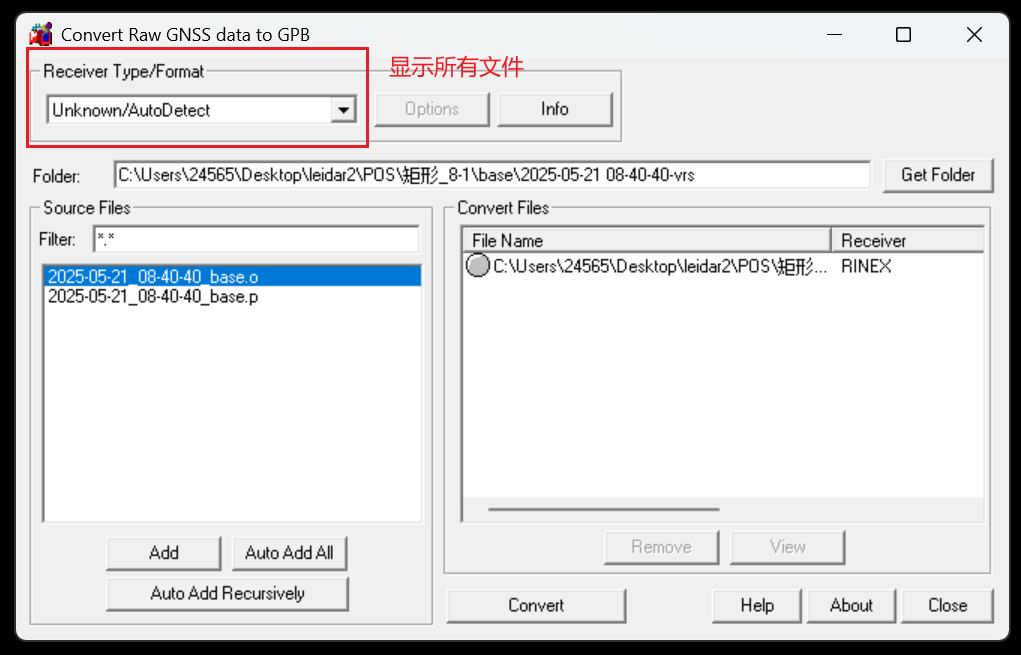
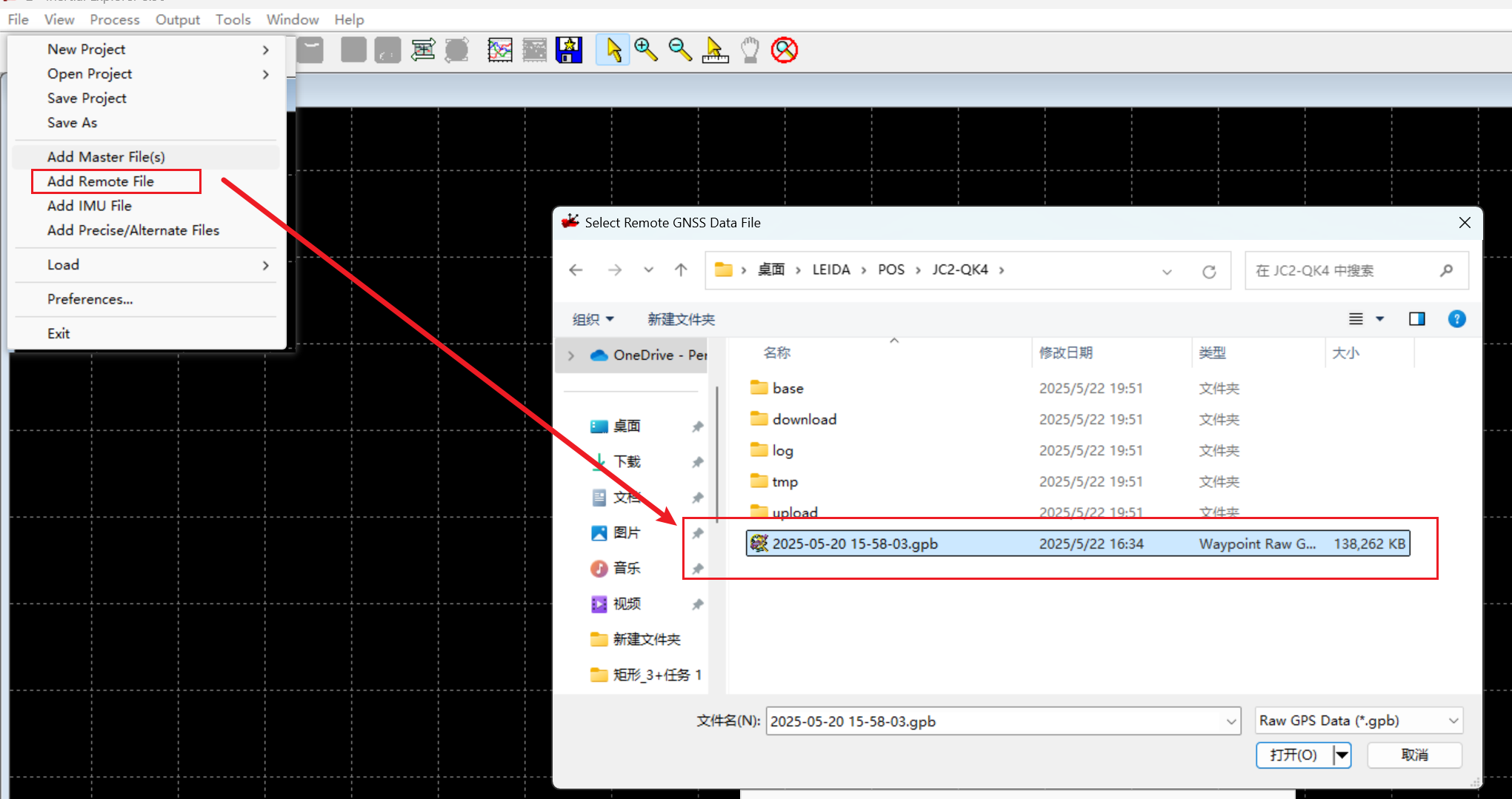
添加流动站数据,点击Convert
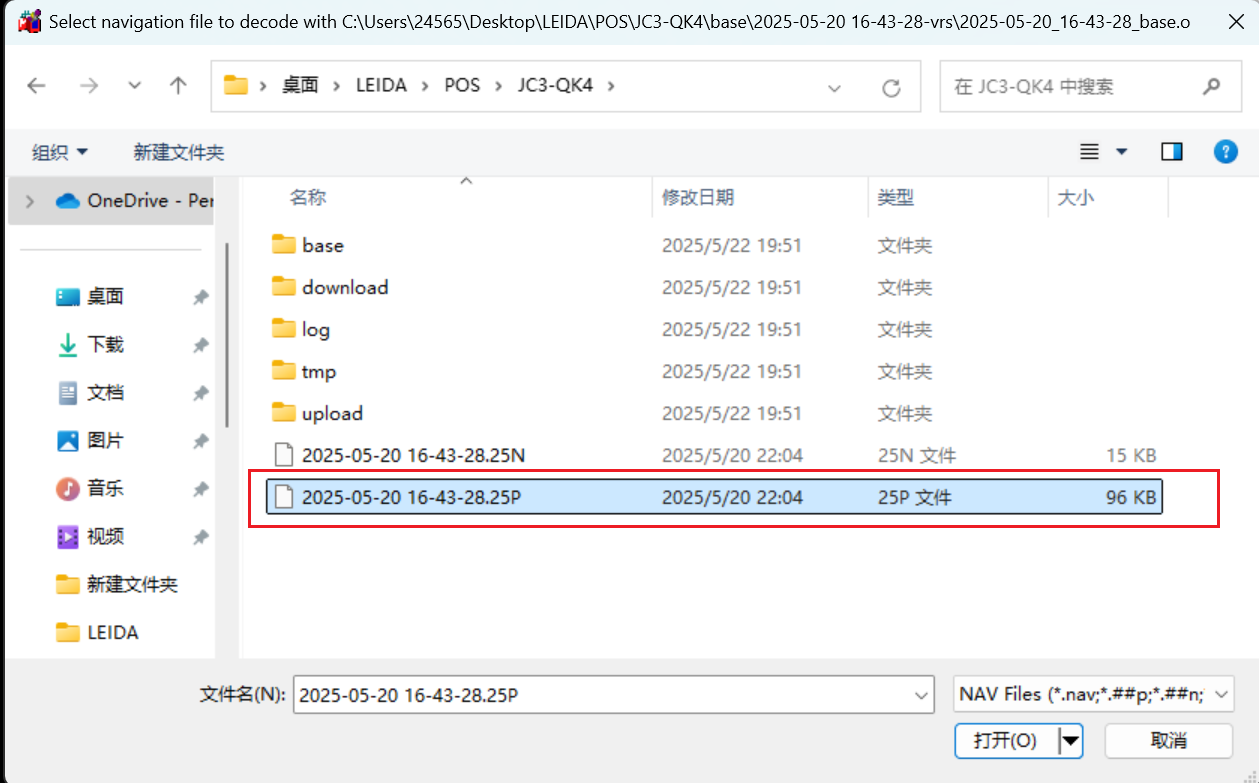
会跳出一个选择文件窗口,选择***.P文件,点击打开
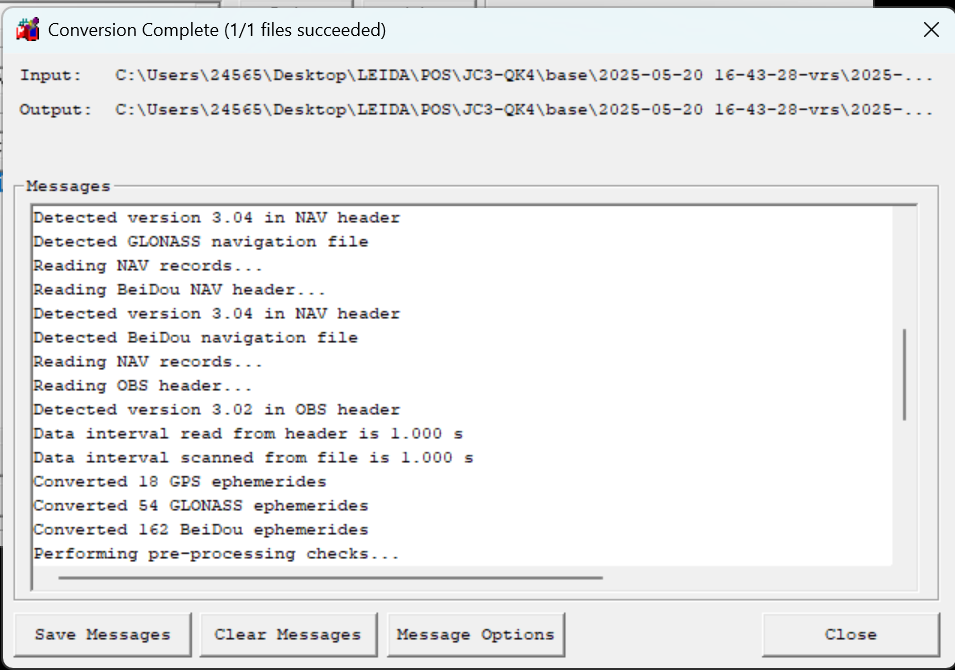
弹出转换成功窗口,点击关闭
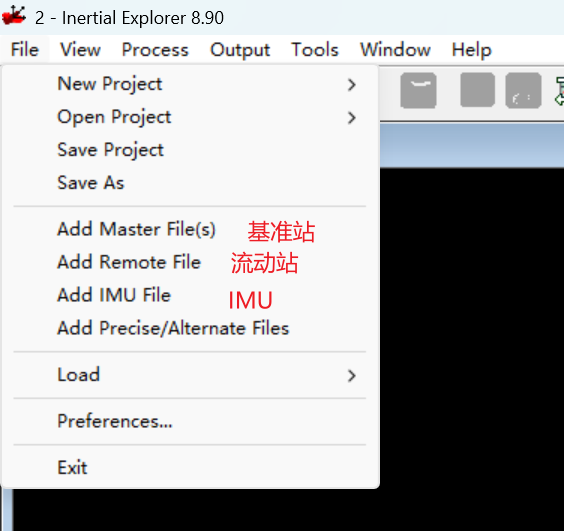
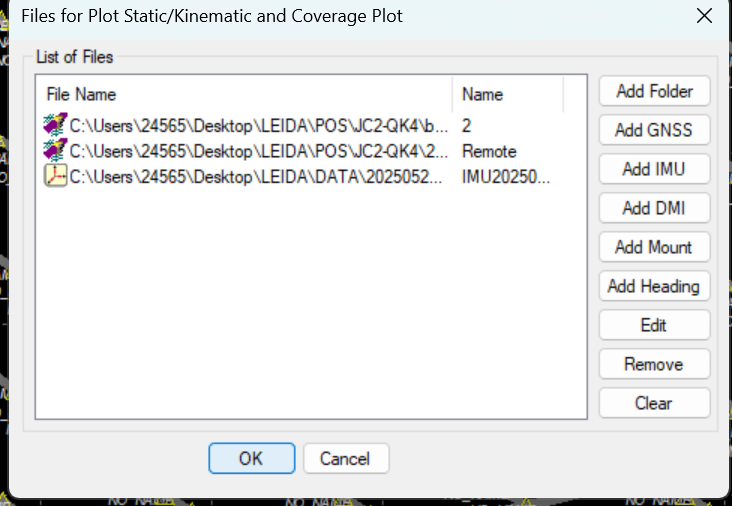
3.3 添加数据
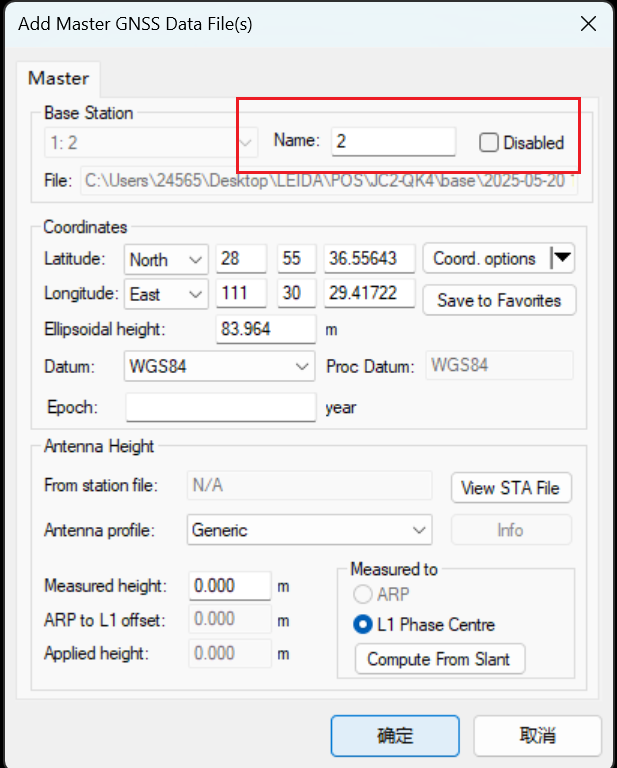
3.3.1 添加基准站数据
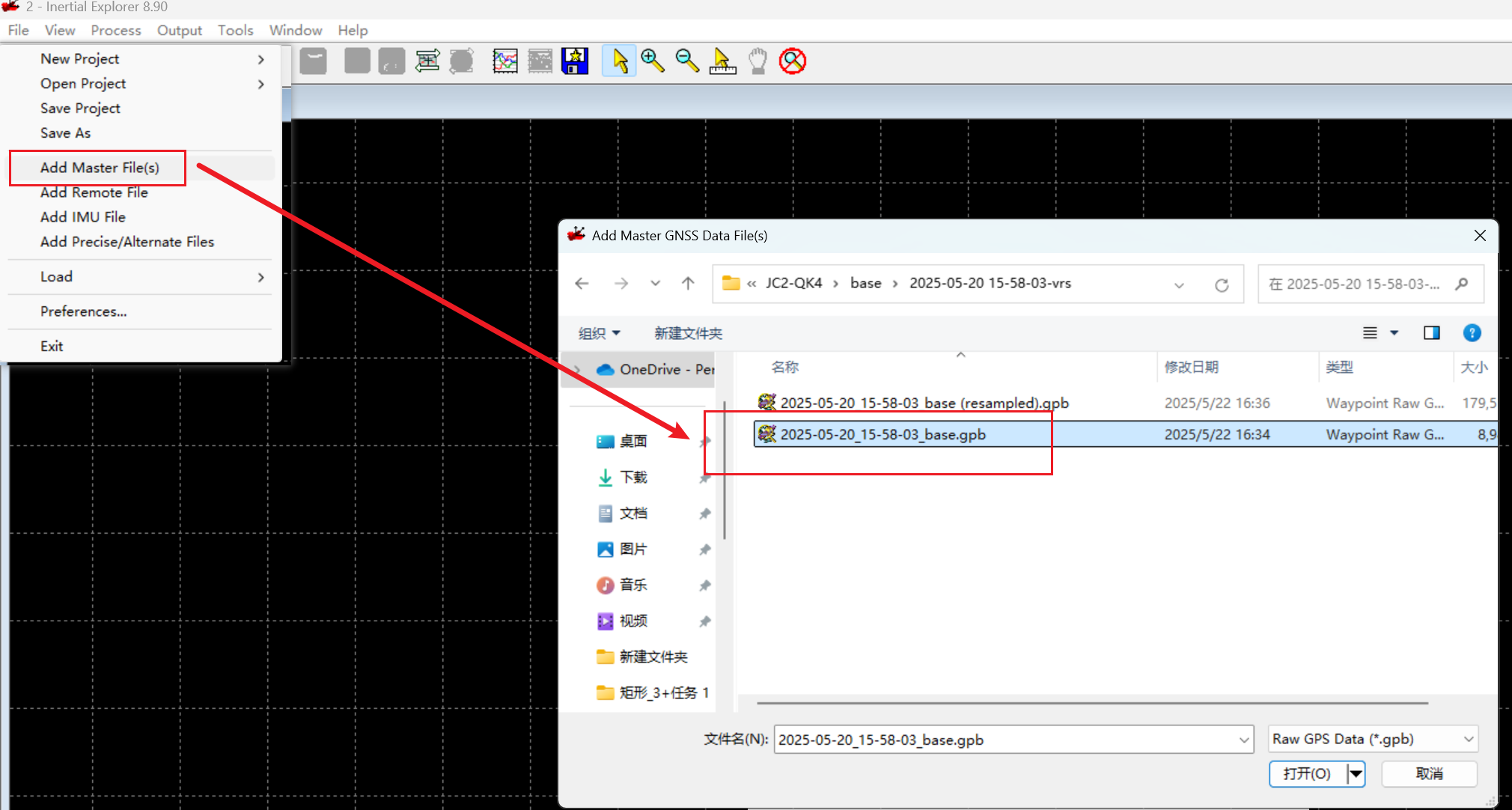
设置 Name 以示区分不同架次数据
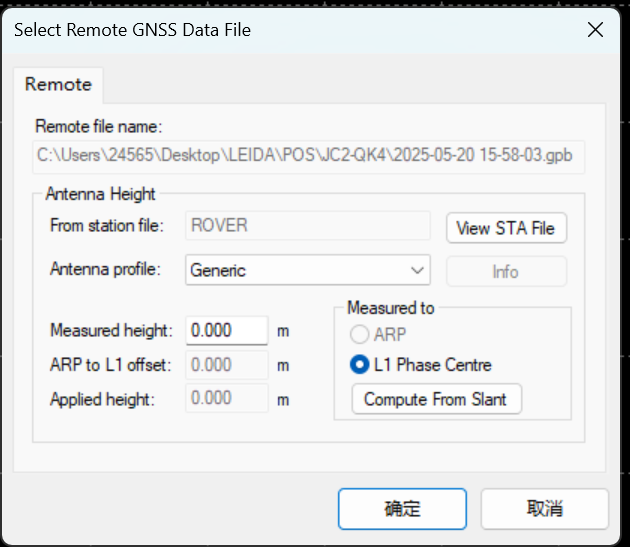
3.3.2 添加移动站数据
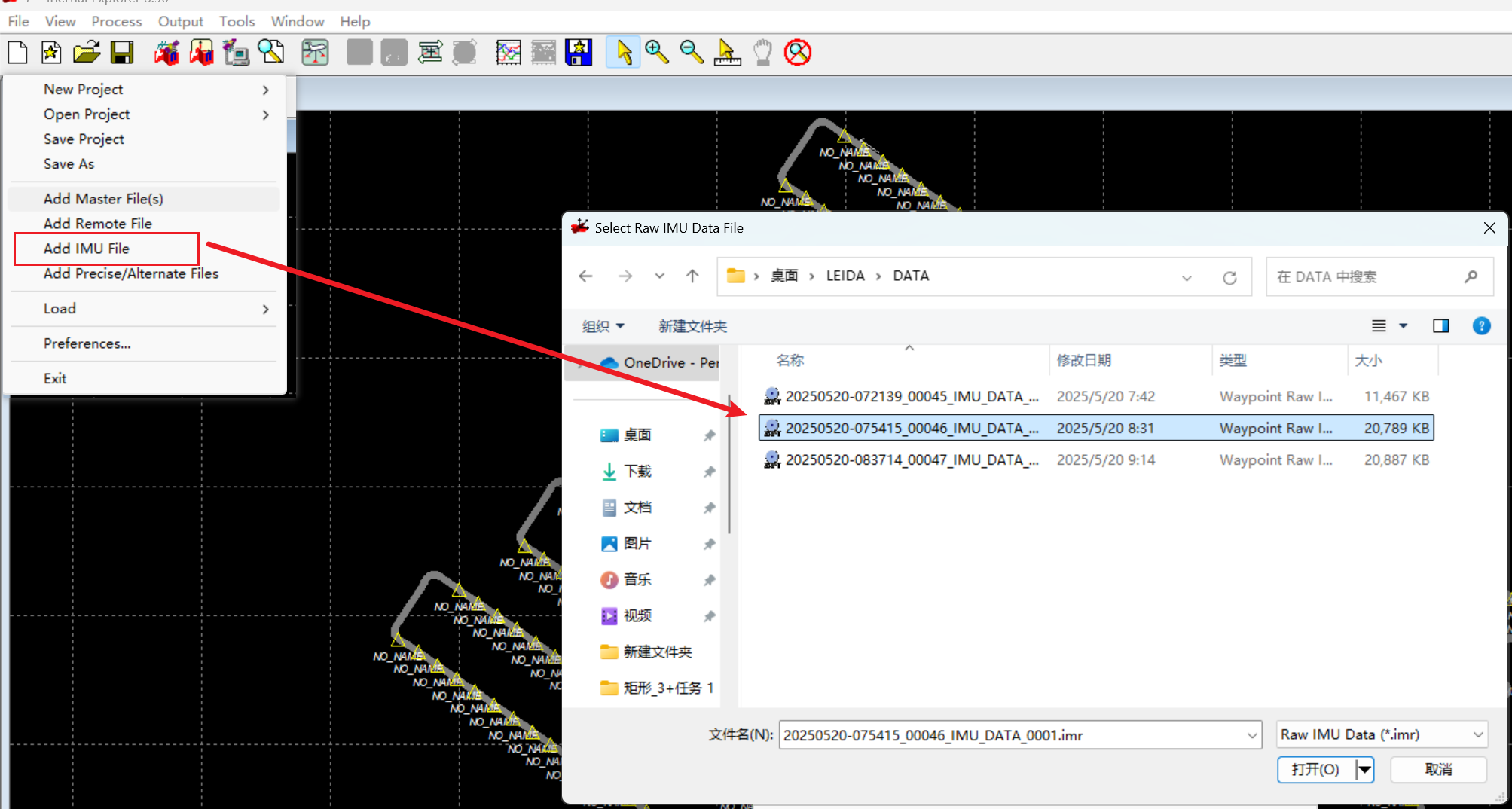
3.3.3 添加IMU数据
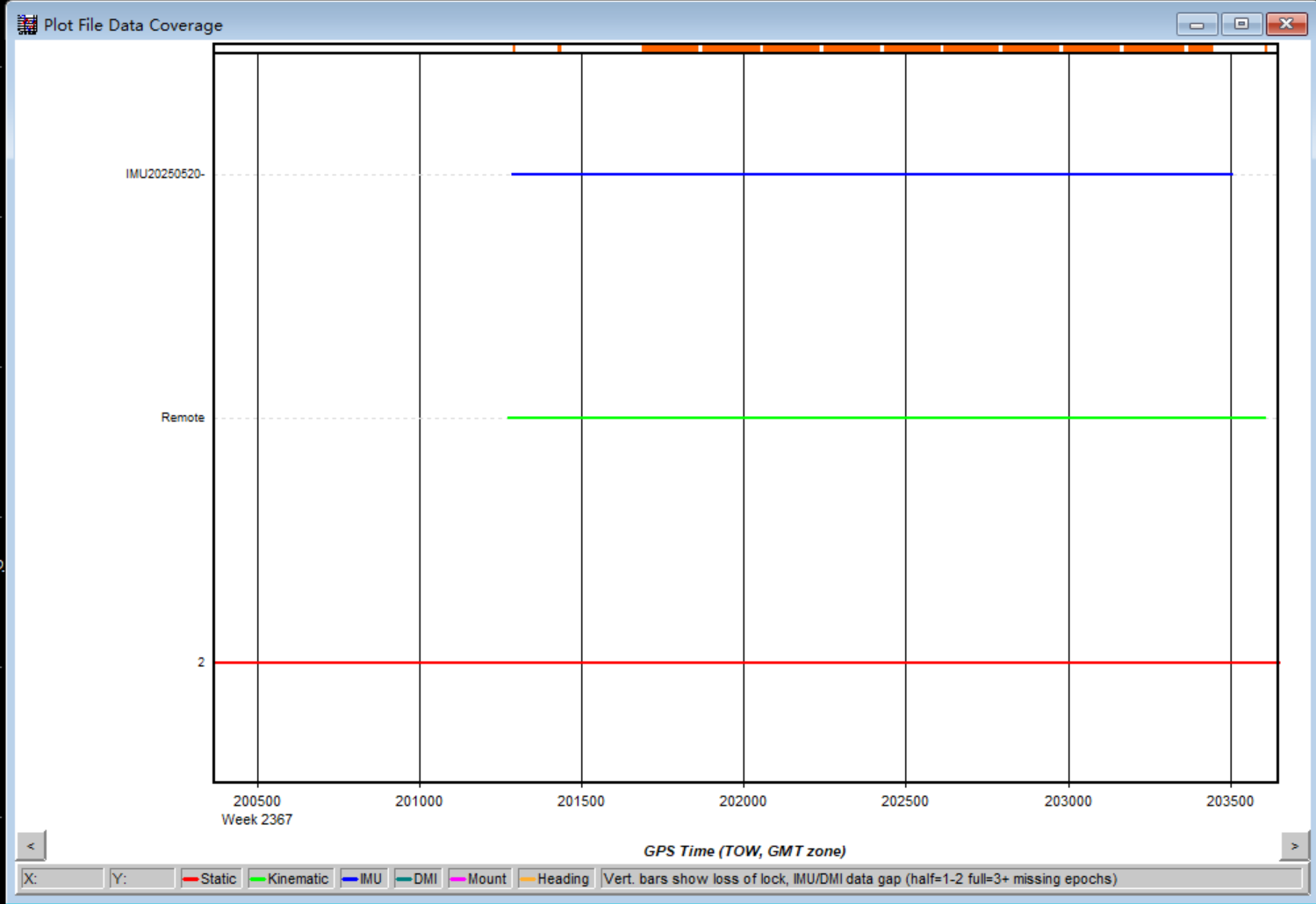
3.4 查看添加的三个数据的时间覆盖图
选择 File Data Coverage
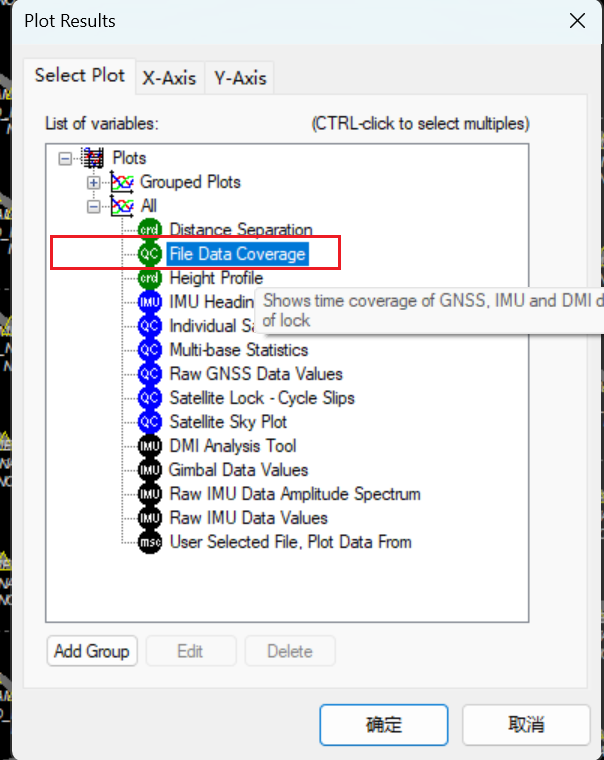
点击ok
如下图,说明三个数据就是对的。
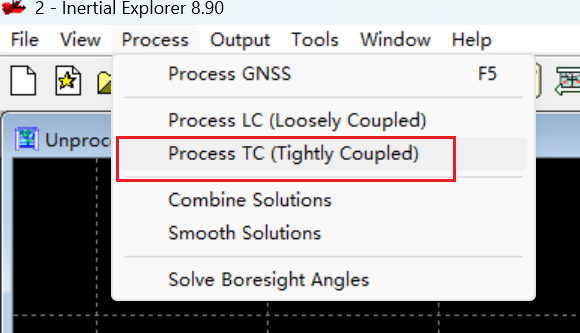
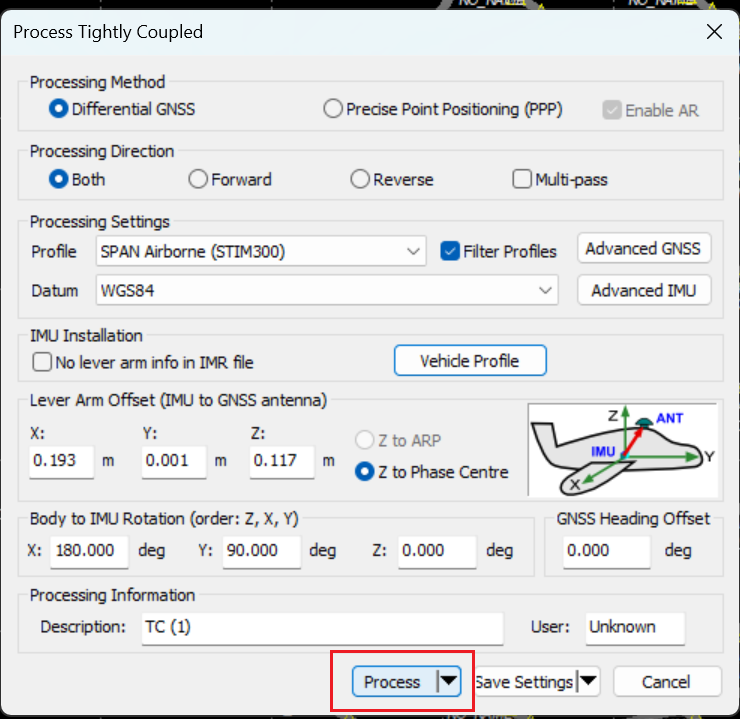
3.5 紧耦合差分解算
Process --> Process TC
- Profile:SPAN Airborne (STIM300) 选择 LiDAR500 对应的IMU
- Vehicle Profile:设置 LiDAR500 的参数
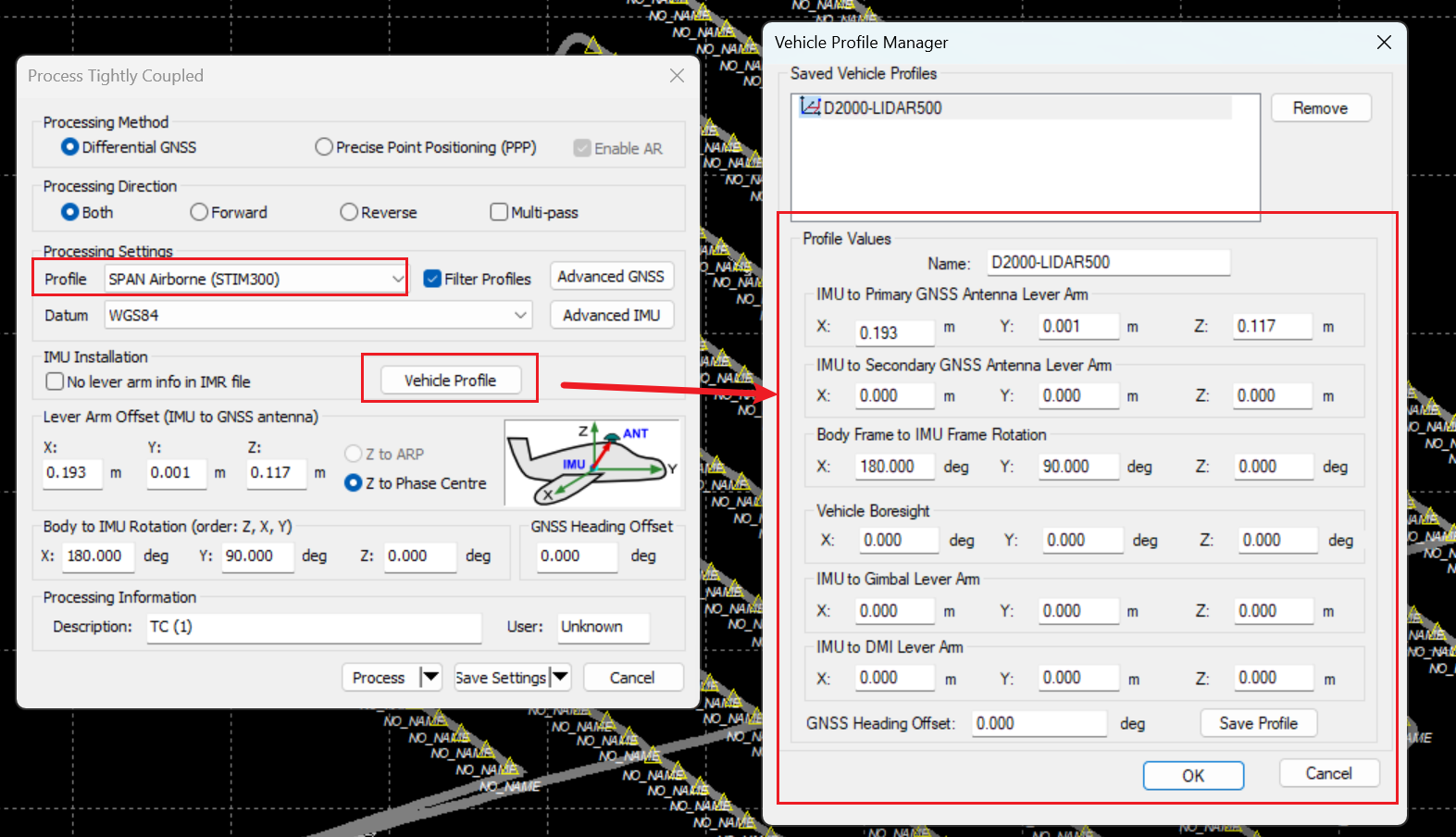
点击Process
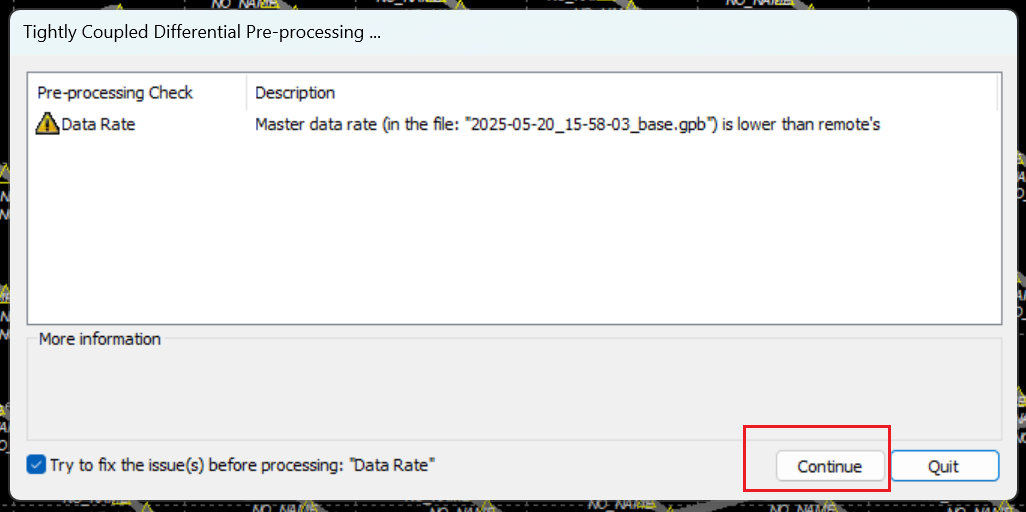
忽略报错,点击Continue
正在处理
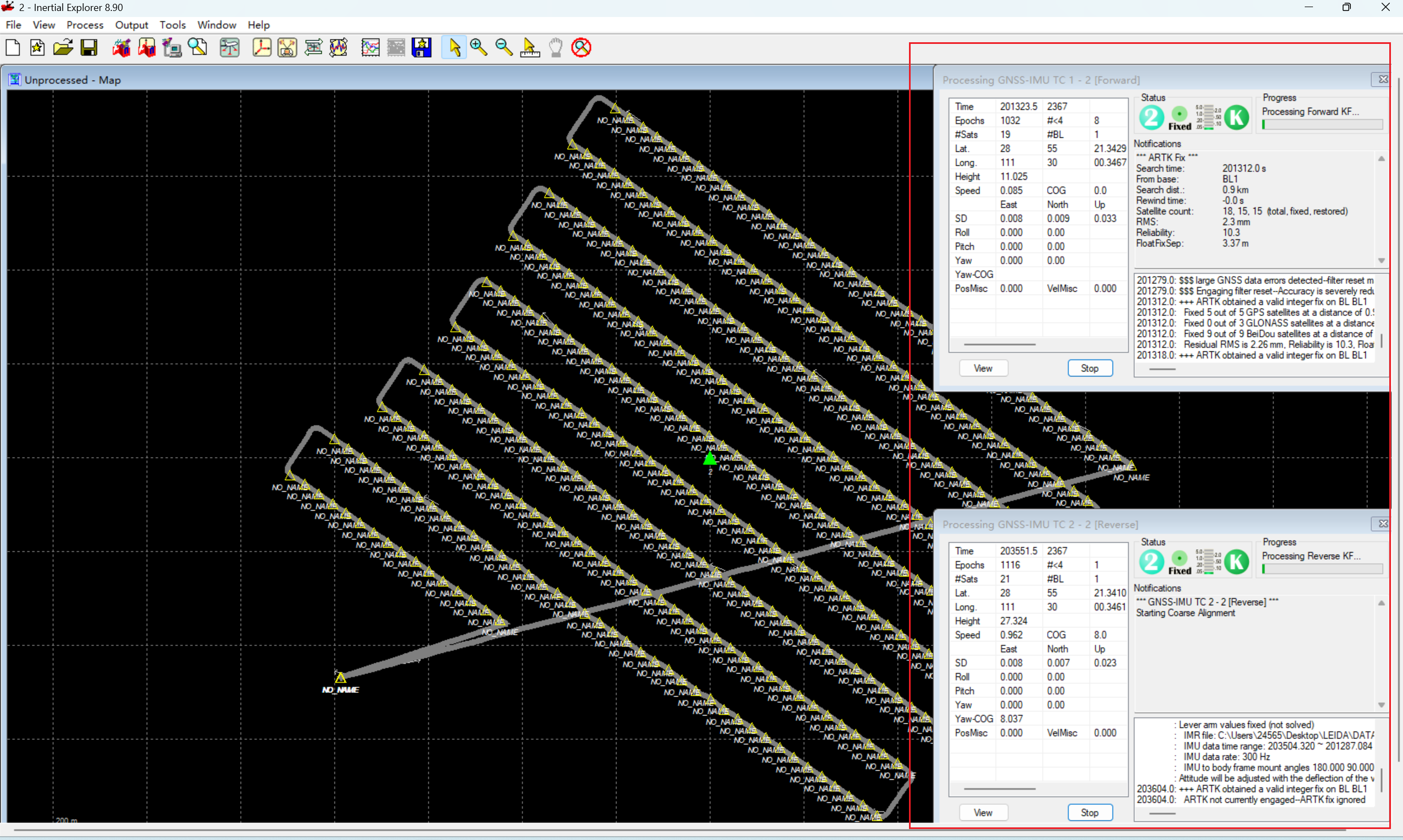

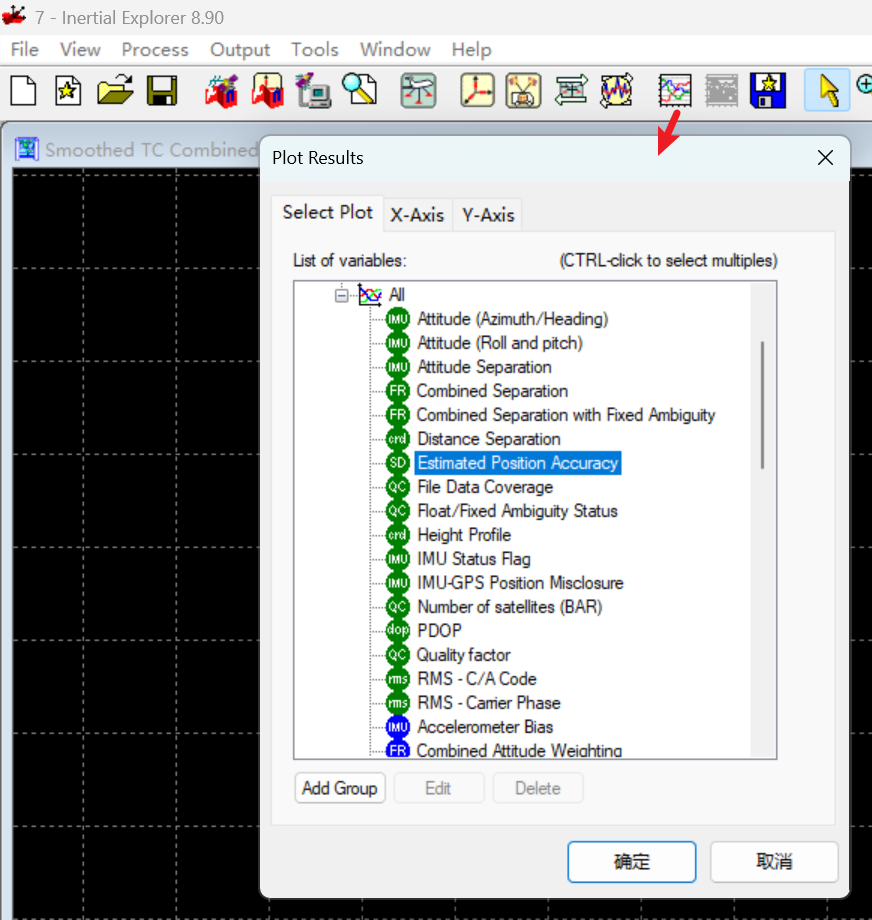
3.6 质量检查与轨迹导出
3.6.1 质量检查
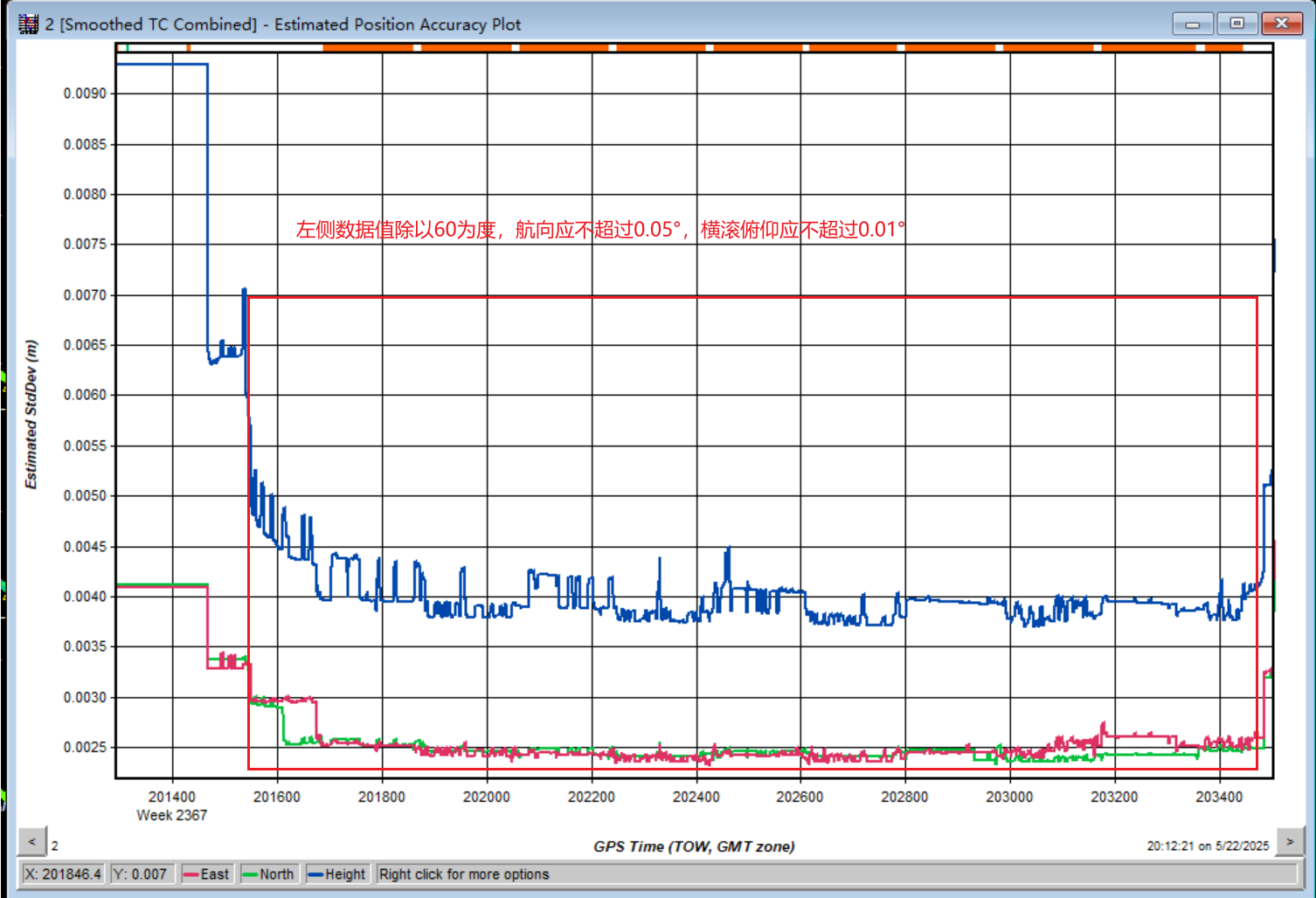
点击下图红色框按钮,查看 POS 数据解算精度,一般位置精度小于 2cm,姿态精度横滚及俯仰小于 0.01°,航向小于 0.05°为解算正常。
左侧数据除以60为度,航向应不超过0.05°,横滚俯仰应不超过0.01°。
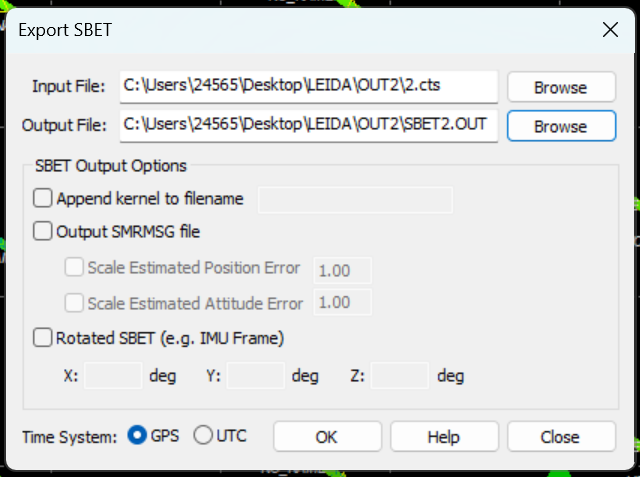
3.6.2 轨迹导出
Output --> Export to SBET
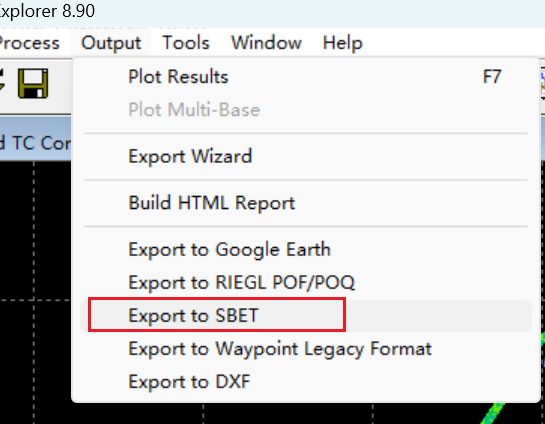
勾选GPS
4 智激光-点云数据预处理
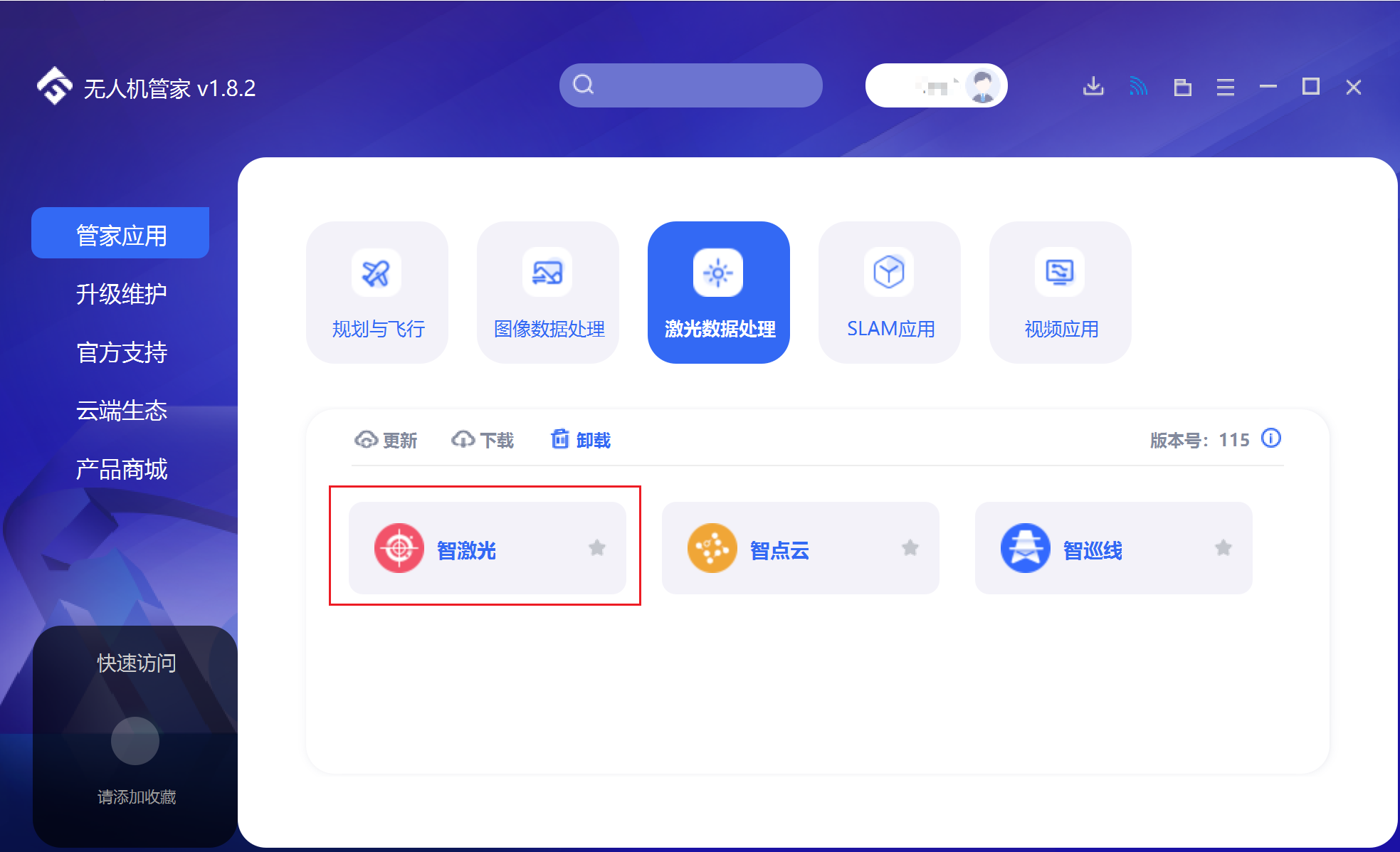
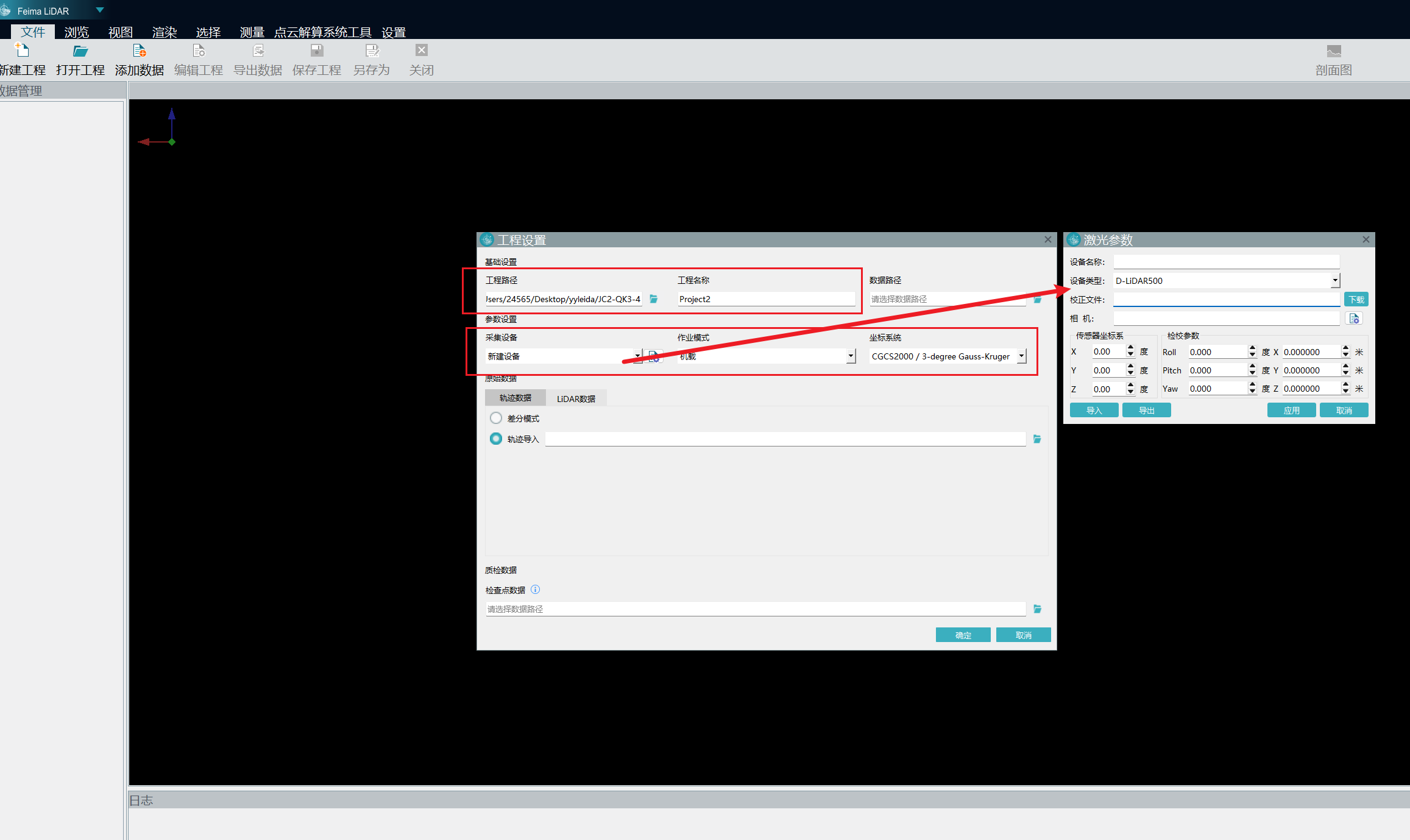
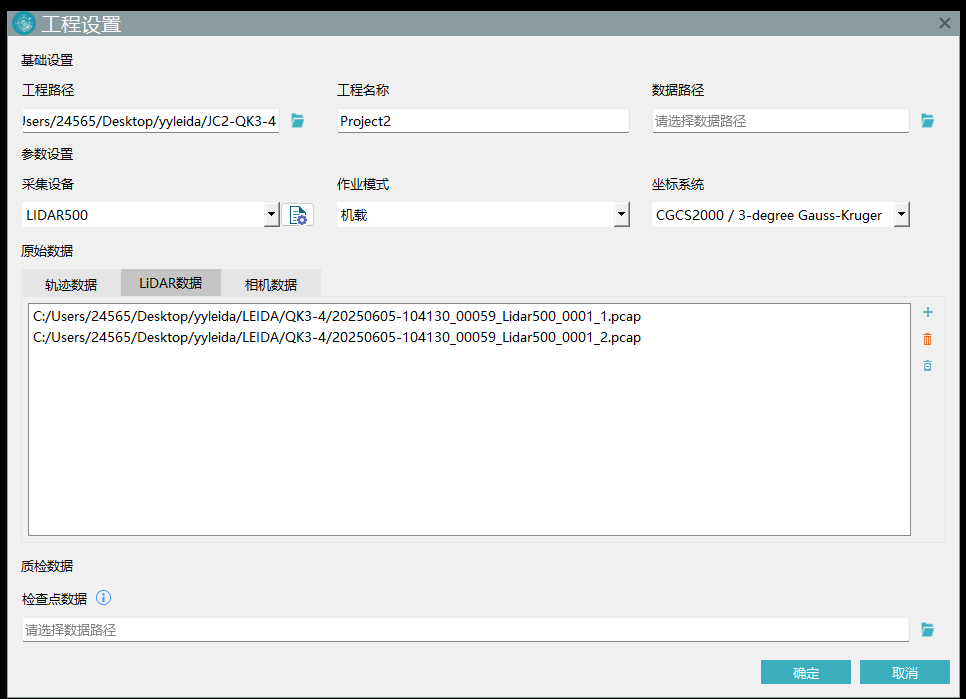
4.1 新建项目
- 设置工程路径与名称
- 采集设备:第一次需要选择新建设备,根据输入设备名称(设备SN码),点击下载参数
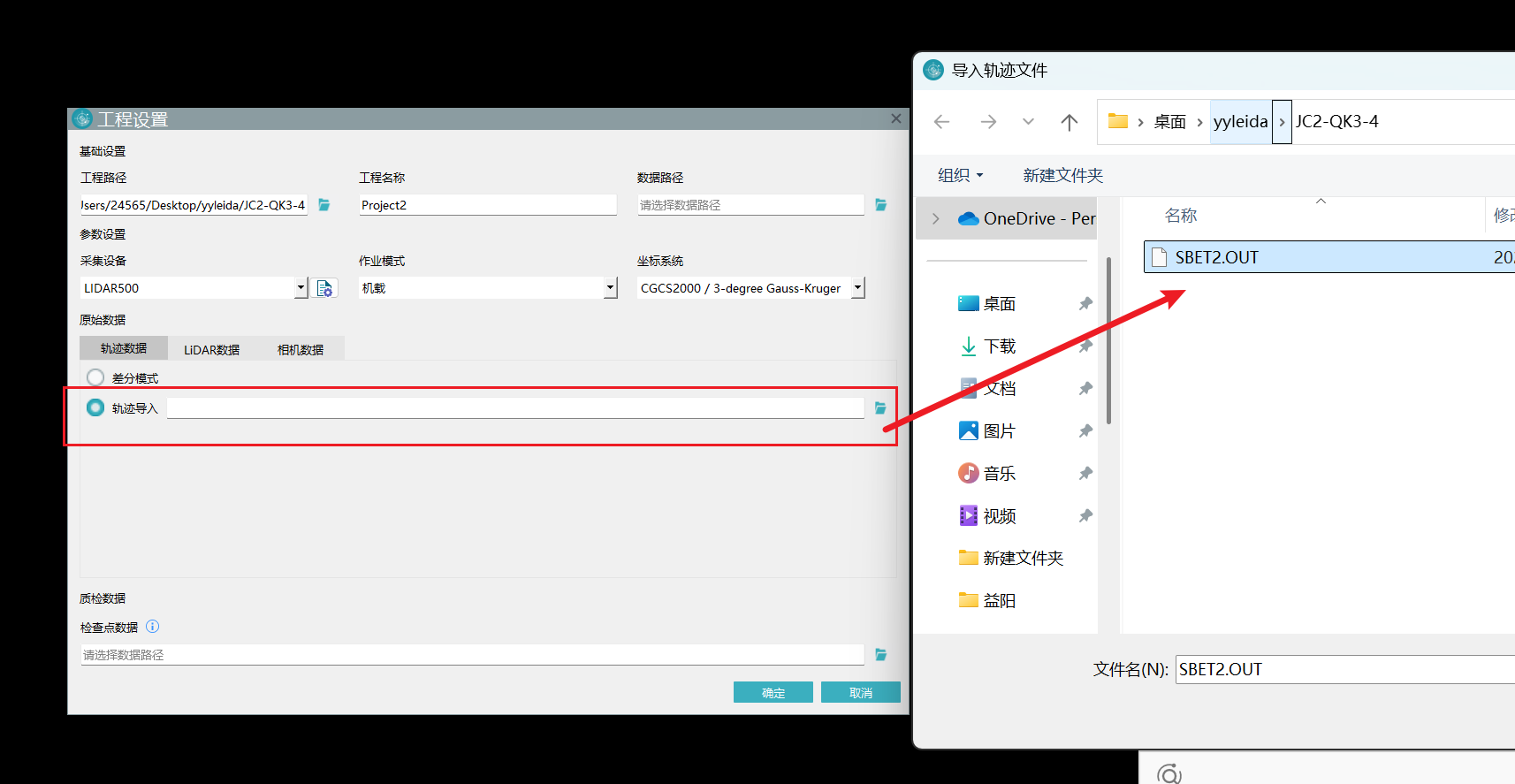
选择轨迹文件
添加对应的激光数据
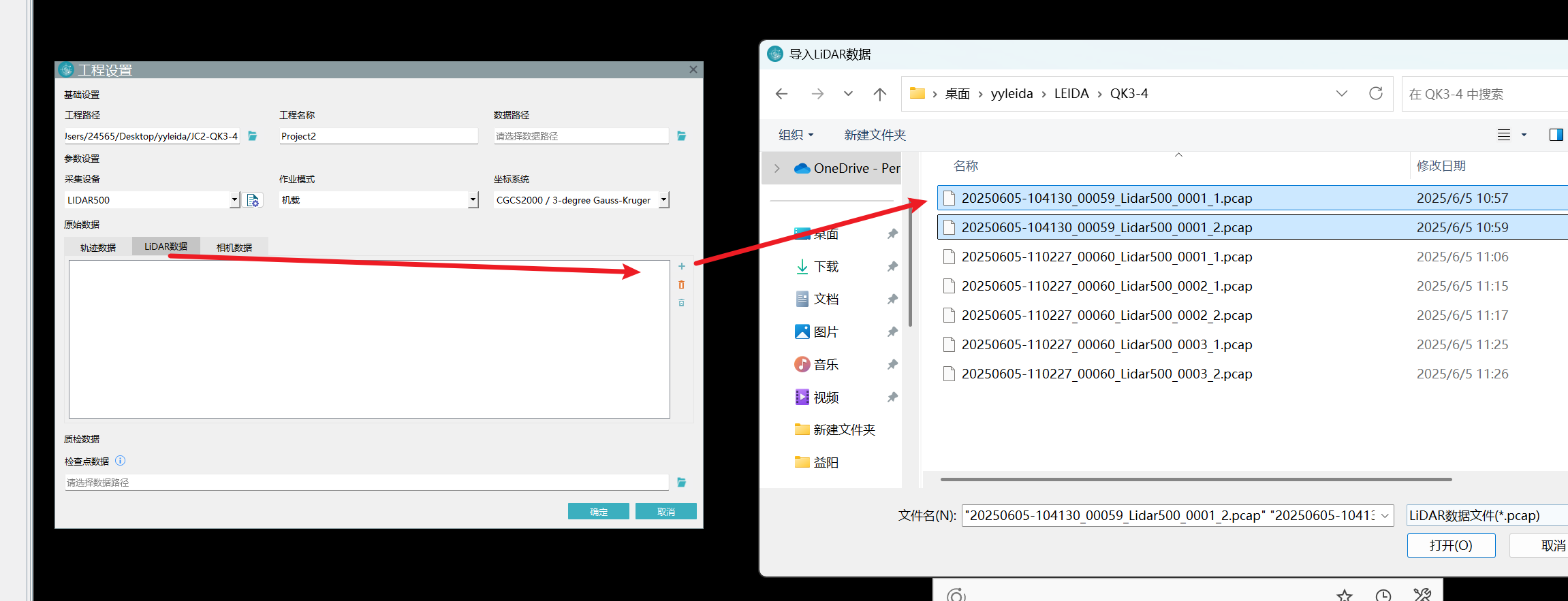
点击确定(这里检查点数据后面添加)
4.2 点云解算
- 处理过程勾选优化平差(去噪等不勾选,是因为后面点云处理会进行这几步操作)
- 夹角尽量不超过40°
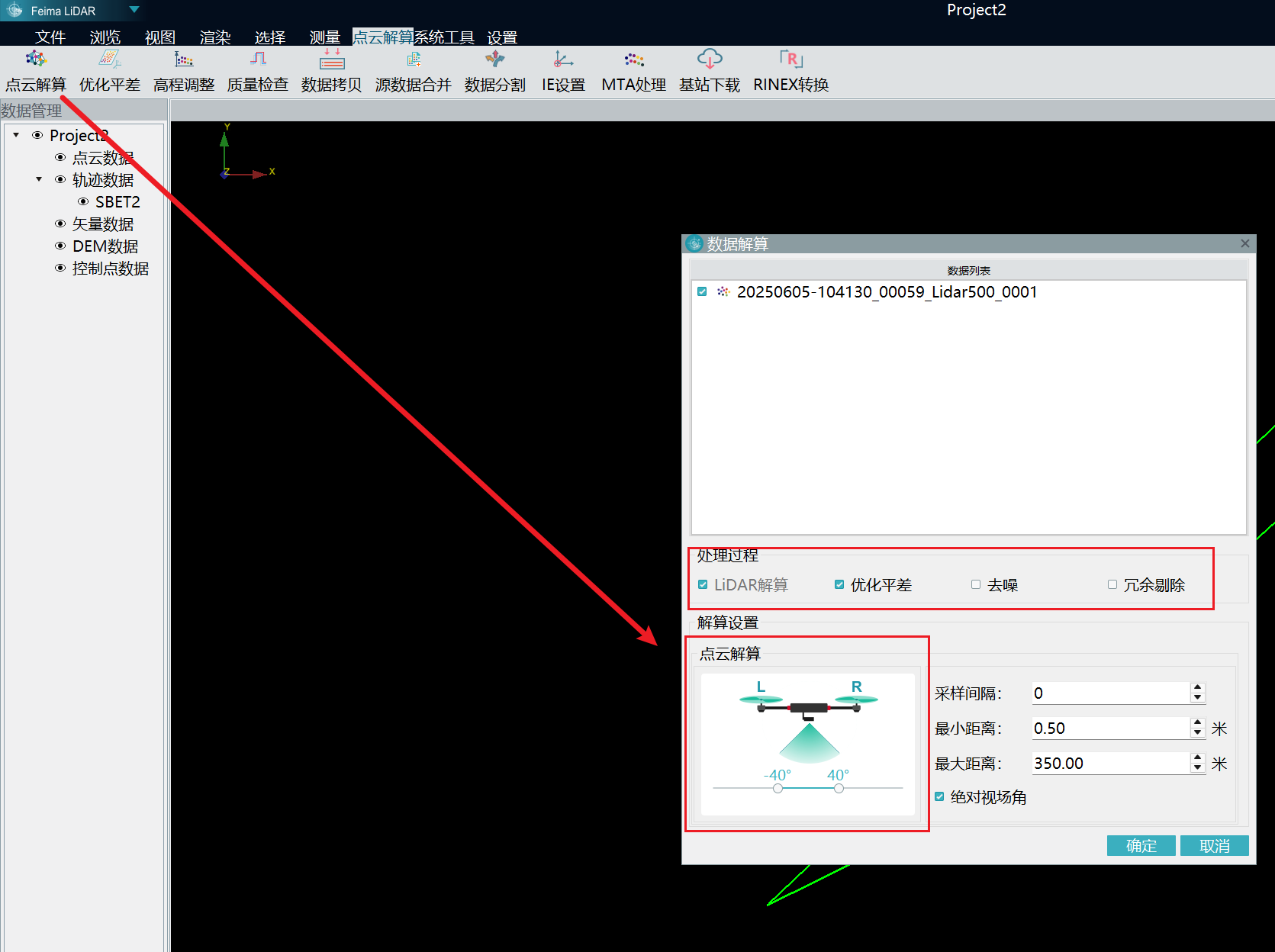
等待解算完成
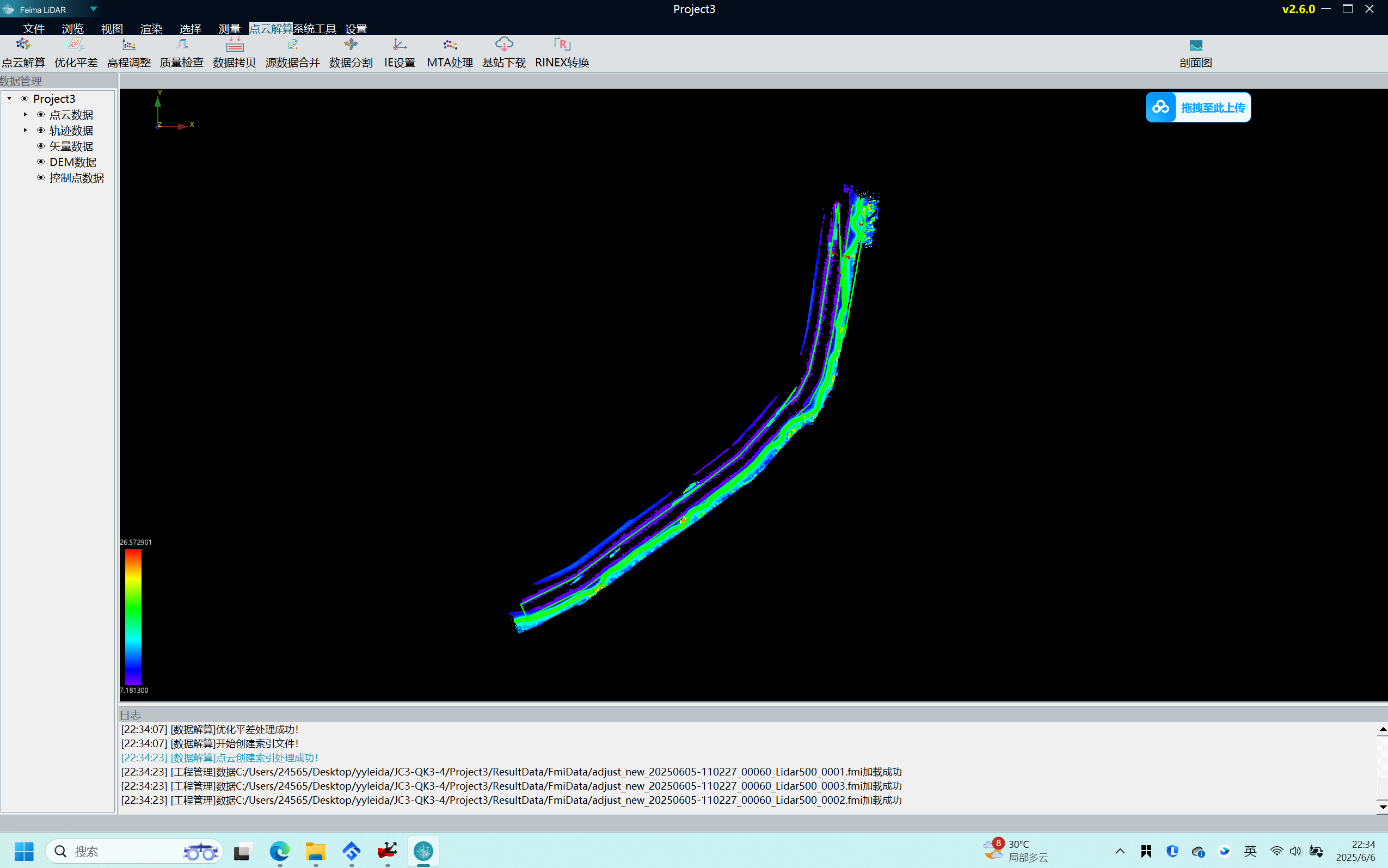
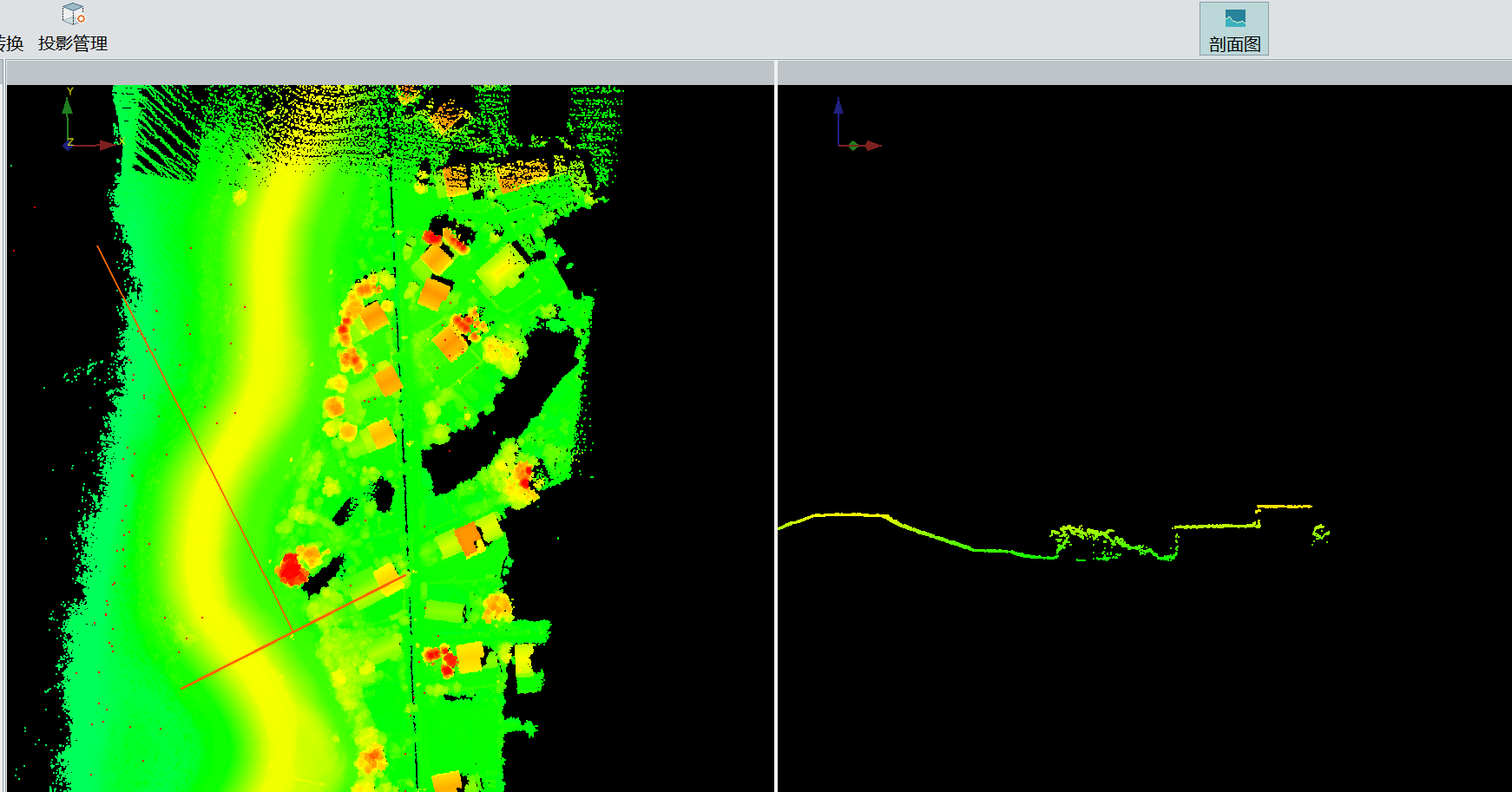
4.2.1 查看分层情况
点击剖面图,对着图标右键可以打开剖面设置窗口
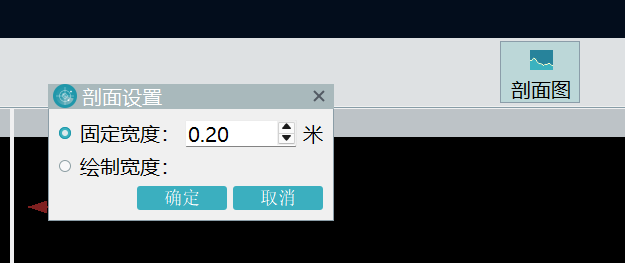
根据剖面线查看检查处的点云分层情况
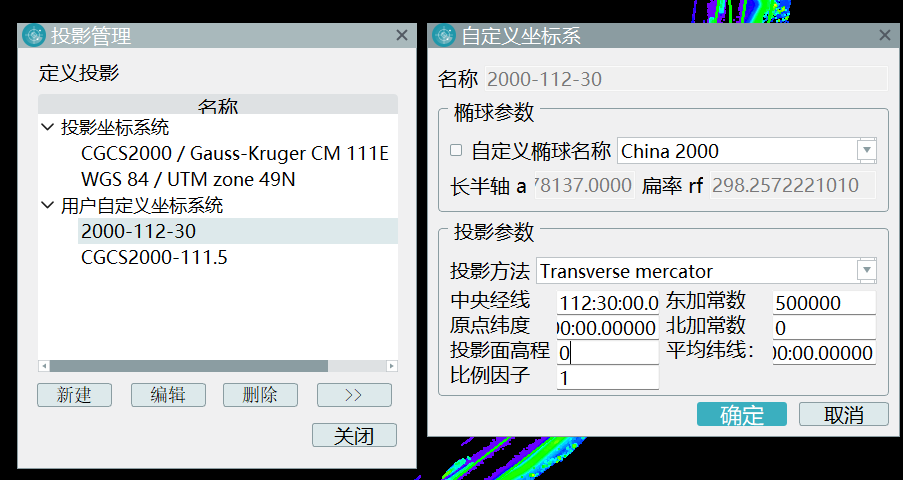
4.3 投影管理
点击 >> 可以选择系统自带的标准投影分带坐标系统
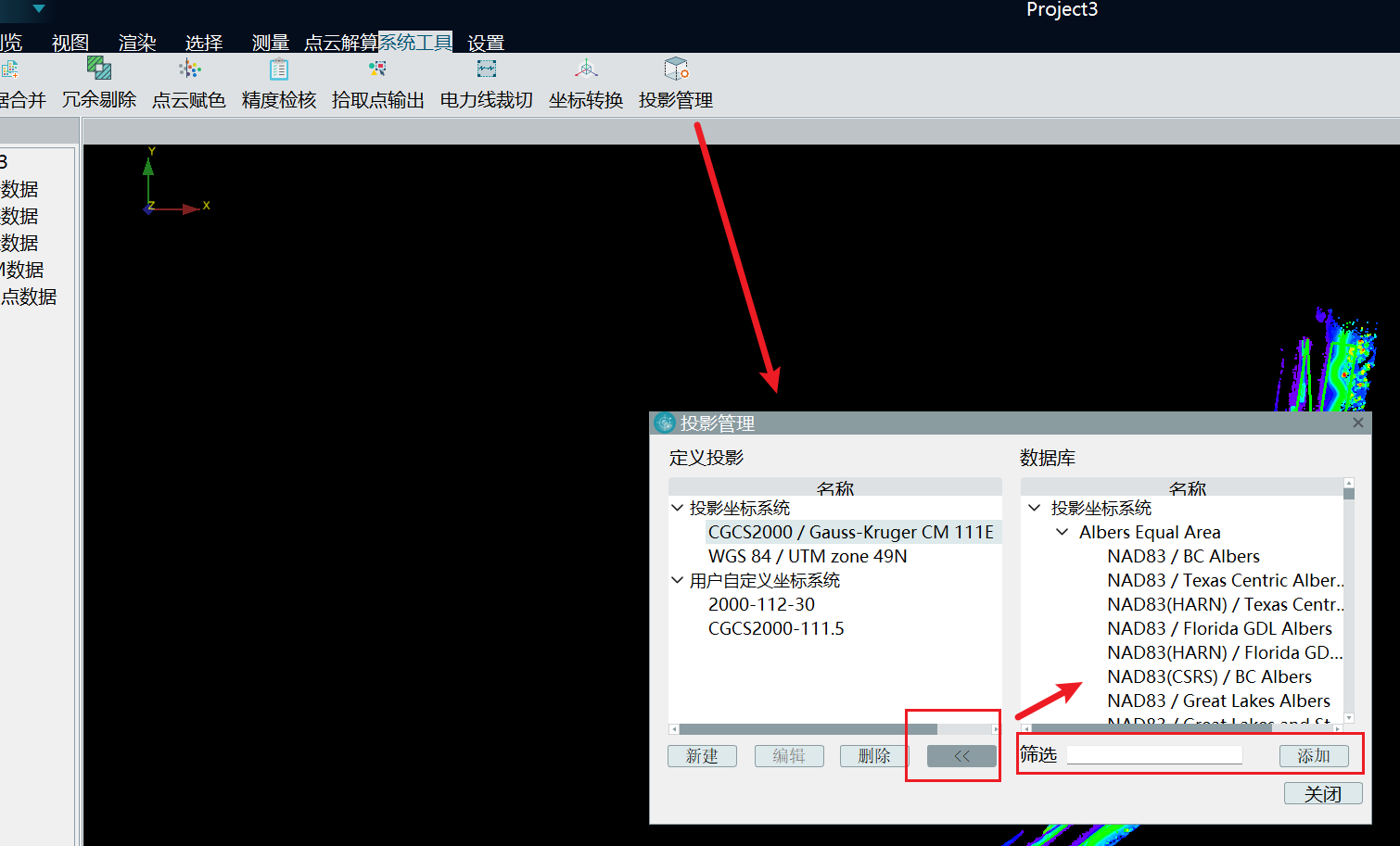
点击新建,可以自定义坐标系统
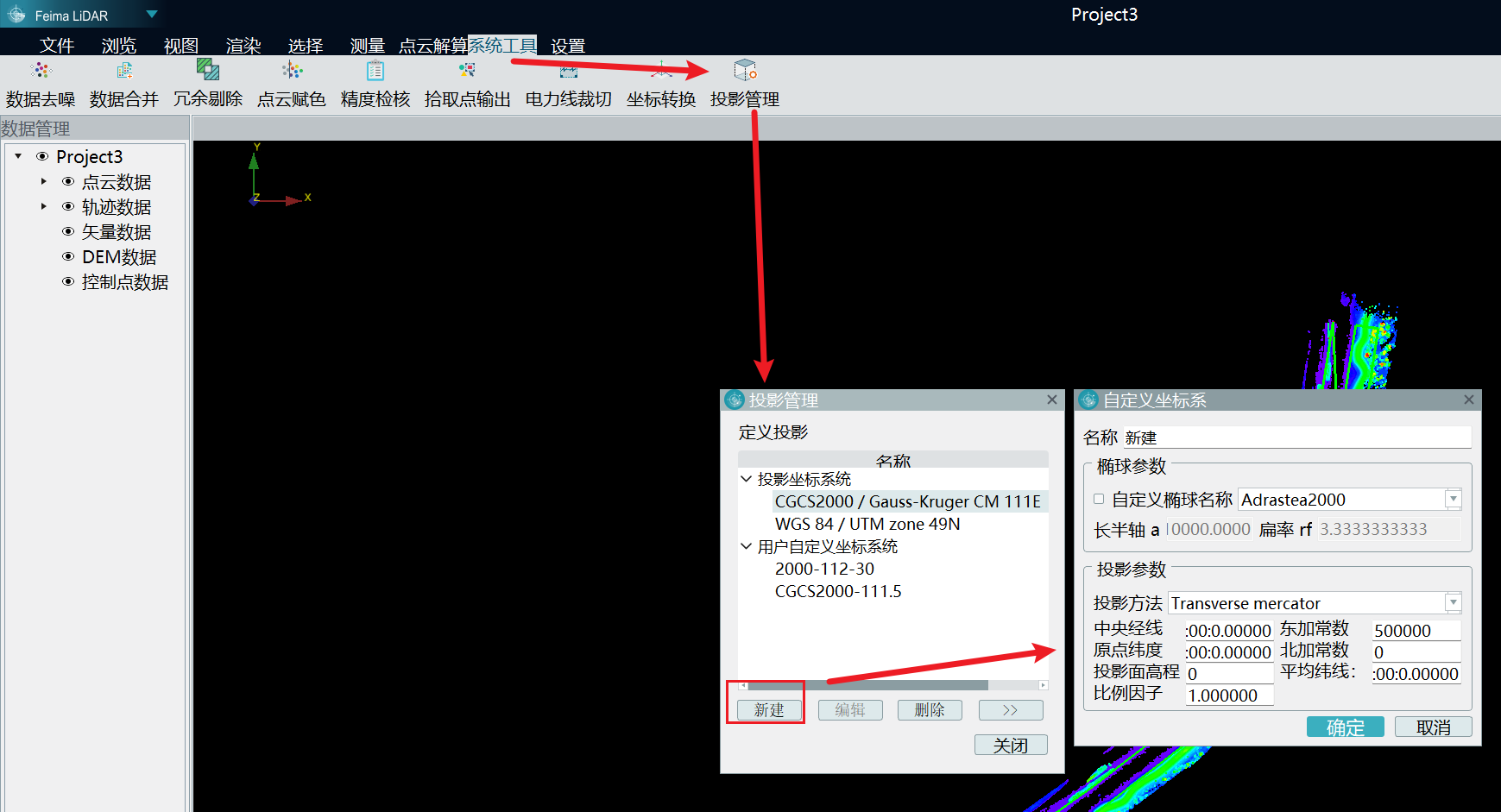
本次需要112°30′的坐标系统:
- 选择对应椭球
- 修改中央经线
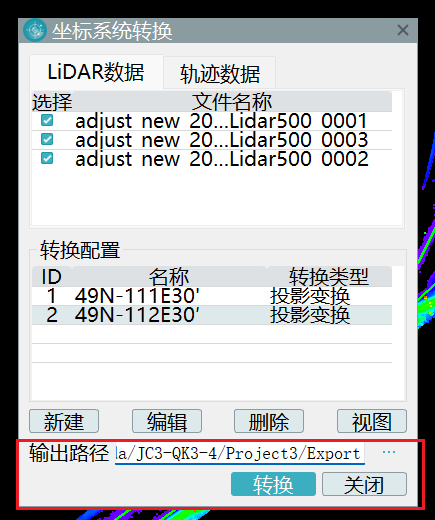
4.4 坐标转换
- 选择LiDAR数据
- 调整范围:调整XYZ
- 新建转换配置(选择坐标系统,可以输入七参数,这样得到的就直接是正常高了)
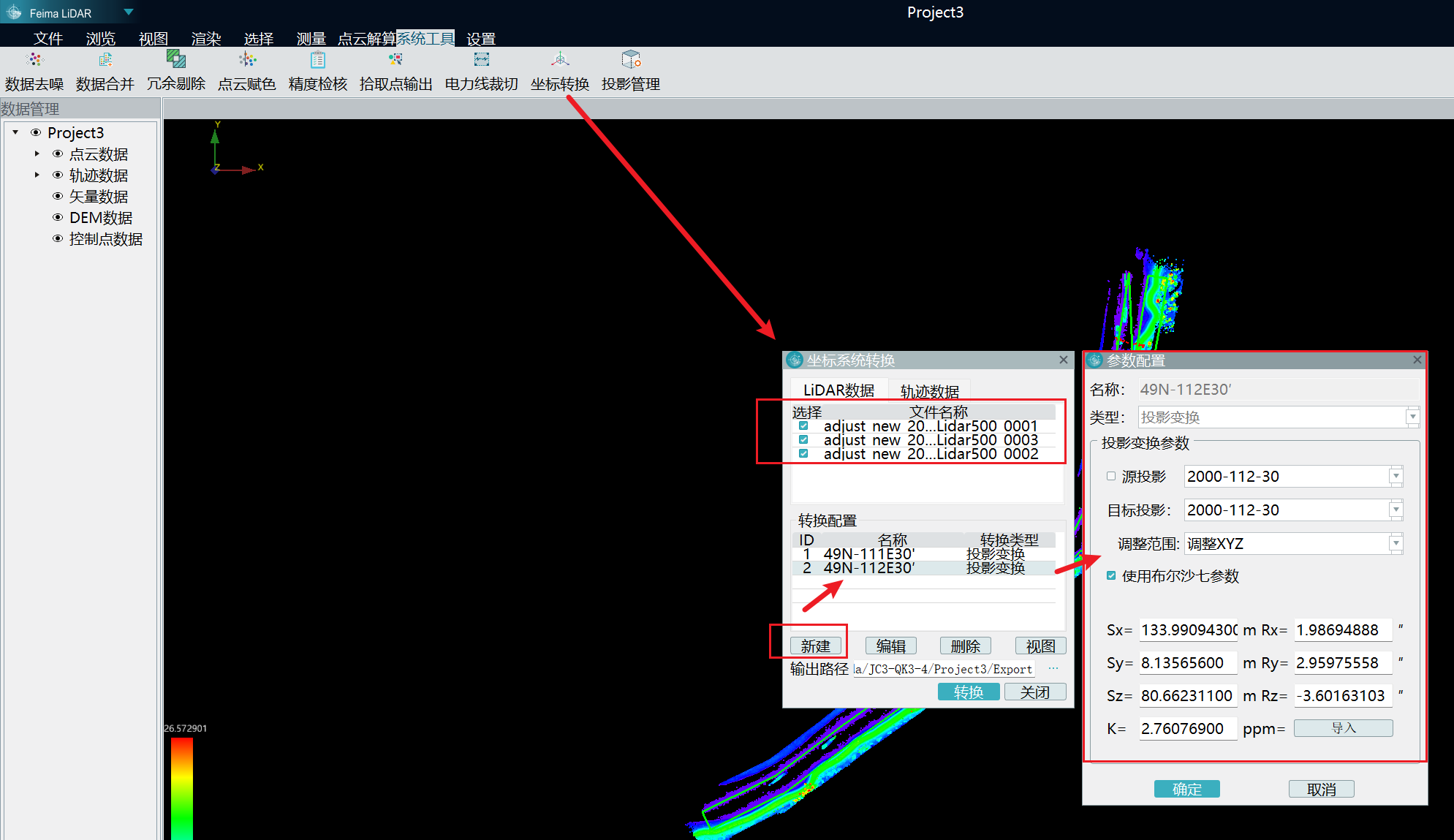
确认输出路径,点击转换
转换完成后,提升是否添加,点击是
4.5 精度检查
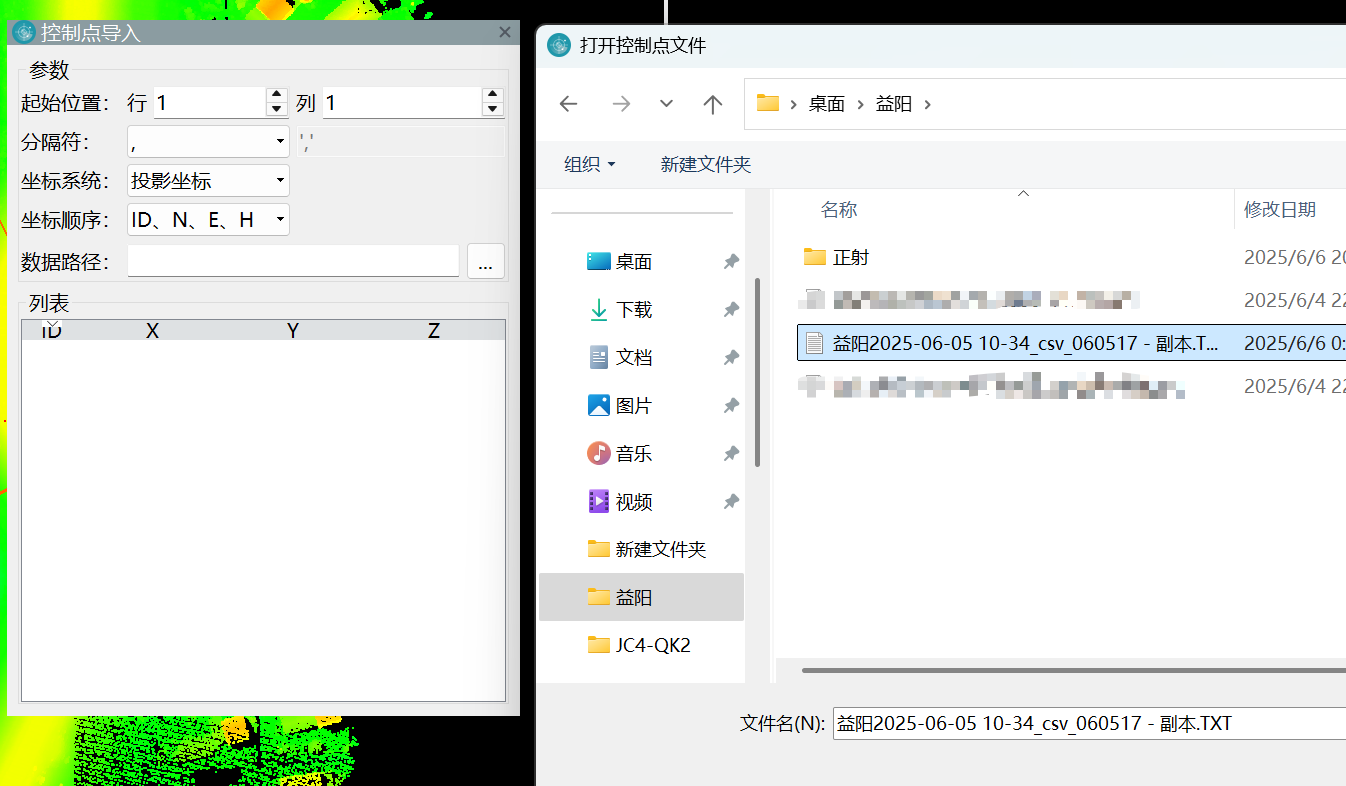
4.5.1 添加数据
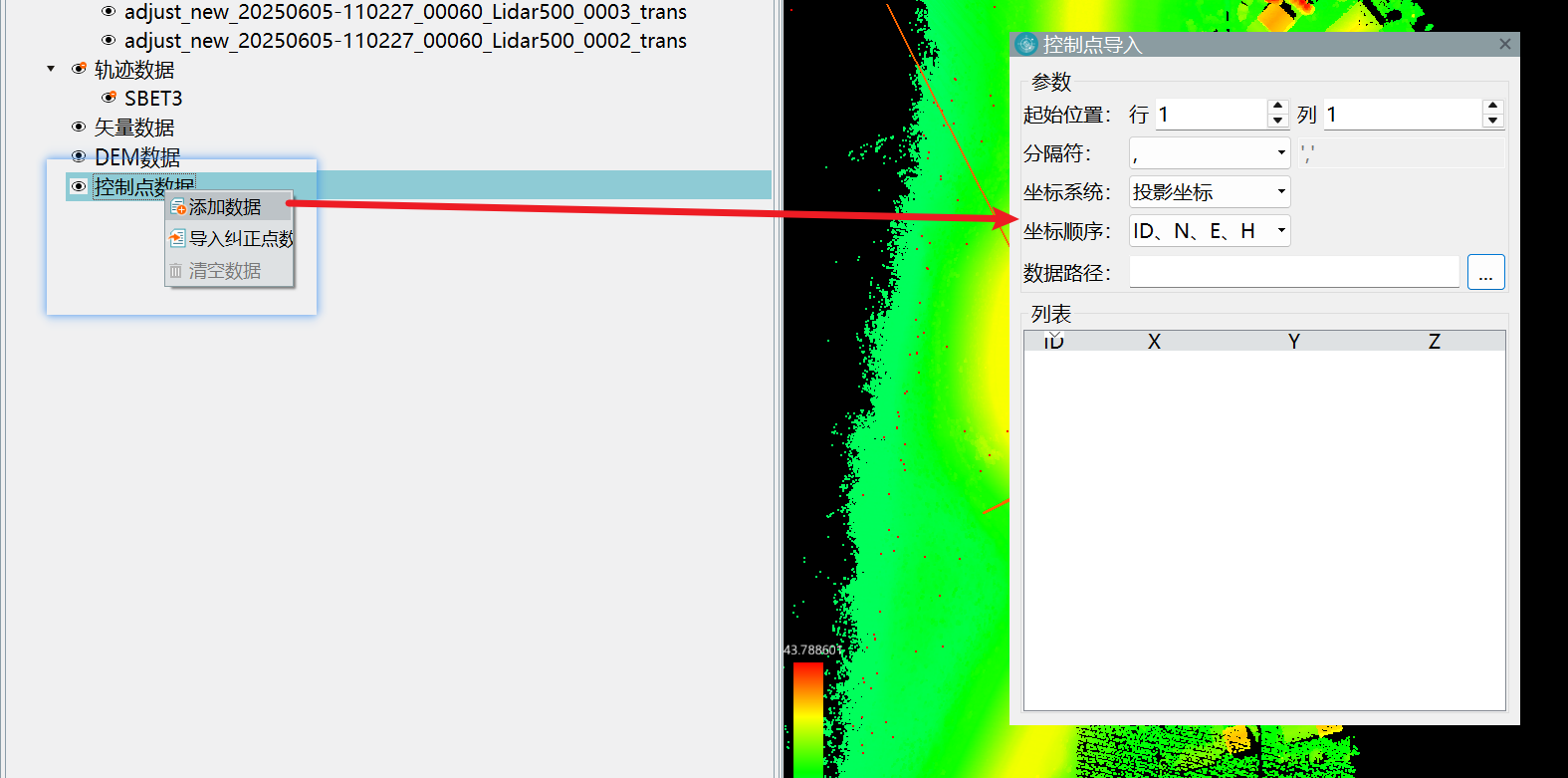
选择检查点文件,并确认坐标顺序 N E H 还是 E N H
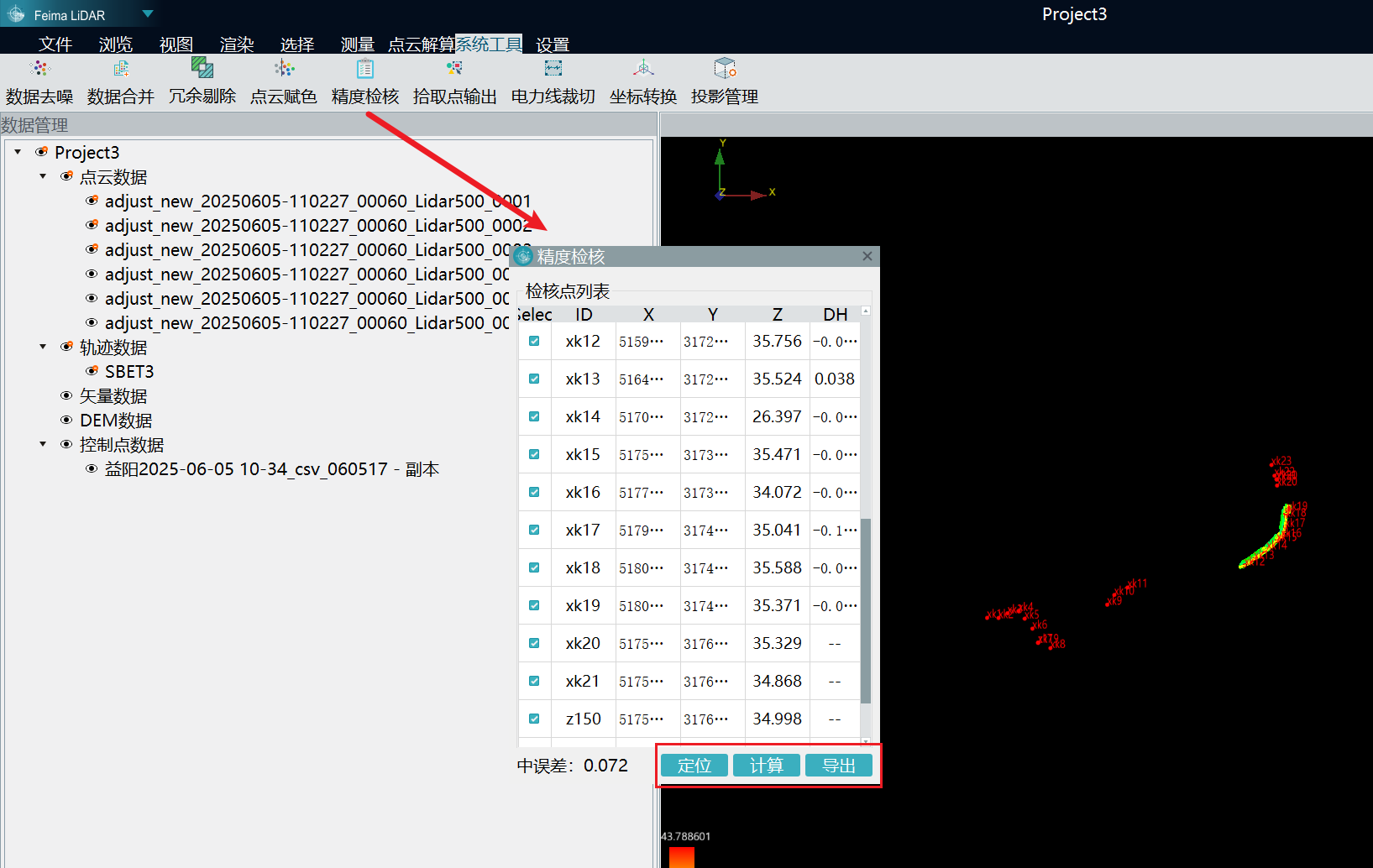
4.5.2 精度检核
点击定位 --> 计算,查看中误差
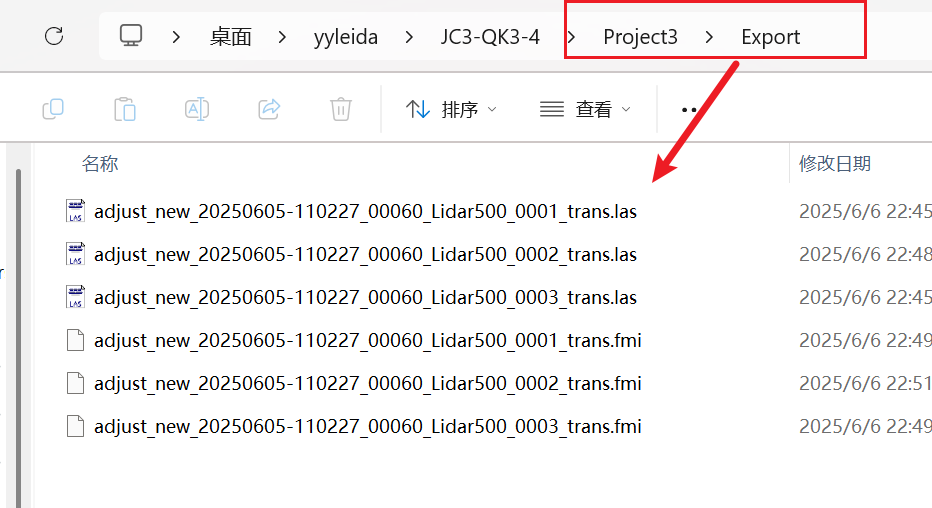
4.6 点云成果
成果在项目文件夹下的Export文件夹里
这里只讲了外业点云数据的预处理,后面点云的精分类等处理操作另作说明。