硬件和科学计算的演变关系:
- 几十年来的硬件进步:计算机硬件不断快速发展,从提升单核速度,到多核并行。
- 科学计算的驱动力:科学计算需求推动硬件创新,比如需要更多计算能力、更高性能。
- 当前的解决方案是并行架构:为了继续提升性能,硬件设计转向多核、多线程、分布式计算等并行体系结构。
- 机器变得越来越复杂:随着并行和异构计算的发展,硬件架构愈加复杂,软件也要适应这种复杂性。
现代硬件复杂性的一个具体例子:
- 硬件背景:过去几十年硬件快速发展,现在科学计算成为推动硬件创新的主要力量。
- 并行架构:为满足计算需求,硬件采用了并行设计。
- 机器复杂性增加:即使是“简单”的笔记本,也包含多种并行技术和硬件加速器。
以这台笔记本为例:
- CPU:Intel Core i5-2410M,主频2.3 GHz,有4个逻辑核心(通常是2物理核+超线程)。
- SIMD扩展:支持SSE2到SSE4.2,AVX(高级向量扩展),能一次处理多个数据,提升单核性能。
- GPU:NVIDIA GeForce GT 520M,有48个CUDA核心,支持GPU并行计算。
总结
这说明现代计算设备包含多层次的并行:
- 多核CPU并行(多线程、多核)
- SIMD指令并行(单指令多数据,向量计算)
- GPU并行(大量小核心,适合大规模并行任务)
计算机硬件和软件的发展阶段,以及随之而来的性能提升和表达能力(expressiveness)变化:
1. 单核时代 (Single Core Era)
- 性能重点:通过提升单核频率和指令集优化来提升性能。
- 代表语言:C、Fortran、C++,多以顺序执行为主。
- 特点:顺序执行,编程相对简单,但性能提升受限于时钟频率。
2. 多核/SIMD时代 (Multi-Core/SIMD Era)
- 性能重点:
- 利用多核并行(线程)
- 利用SIMD指令集(单指令多数据)提高单核效率
- 代表语言:Java(支持多线程和并行模型)
- 特点:
- 需要写并发代码,提高表达能力(expressiveness)以处理线程和数据并行。
- 性能依赖于有效的线程管理和SIMD使用。
3. 异构计算时代 (Heterogeneous Era)
- 性能重点:
- 利用多种并行架构,如GPU、SIMD、Intel Phi(加速器)
- 线程级并行和分布式计算
- 特点:
- 复杂度更高,软件必须支持多种硬件资源
- 分布式系统和异构硬件成为主流,性能提升巨大,但编程复杂度也显著增加。
额外说明:
- 表达能力(Expressiveness):随着硬件复杂度增加,软件需要更丰富的抽象和语言特性来表达并行、异构计算,保证代码可维护和高效执行。
- 你提到的“Sequential”(顺序执行)是在单核时代的标志,后来被多线程和异构计算取代或补充。
科学计算设计工具时面临的挑战和解决思路:
挑战(Challenges)
- 非破坏性(Be non-disruptive)
工具设计要尽量不打断用户已有的工作流程或代码架构,容易集成。 - 领域驱动优化(Domain driven optimizations)
针对具体科学计算领域做专门优化,而不是通用但低效。 - 直观的用户API(Provide intuitive API for the user)
让用户使用简单,易于理解和掌握。 - 支持多样化硬件架构(Support a wide architectural landscape)
适应各种并行硬件和计算平台,比如CPU、GPU、分布式系统等。 - 高效性能(Be efficient)
性能不能妥协,工具必须产生高性能代码。
我们的方案(Our Approach)
- 设计成C++库(Design tools as C++ libraries)
利用C++强大的抽象和性能能力,方便集成且高效。 - 用领域特定嵌入式语言(DSEL)设计库(Design these libraries as Domain Specific Embedded Language)
让库本身像一种专门的语言,提供符合领域思维的表达方式,满足挑战2和3。 - 使用并行骨架(Parallel Skeletons)作为并行组件(Use Parallel Skeletons as parallel components)
抽象并行模式,方便复用和跨平台,实现挑战4。 - 利用生成式编程(Generative Programming)交付性能(Use Generative Programming to deliver performance)
编译期代码生成和模板元编程,最大化运行时效率,满足挑战5。
简单总结:他们选择用C++写一套类似“领域语言”的库,封装并行模式,借助编译期代码生成实现高性能且跨架构的科学计算工具,同时保持易用和兼容性。
**并行骨架(Parallel Skeletons)**的理由,分为软件抽象和硬件抽象两个方面:
为什么用并行骨架(Why using Parallel Skeletons)
1. 软件抽象(Software Abstraction)
- 写代码时不用管并行细节
程序员只需关注算法逻辑,底层的线程、同步、负载均衡等复杂细节被骨架封装。 - 代码可扩展且易维护
代码结构清晰,易于理解和扩展,减少并行代码常见的bug。 - 易调试、可证明、可认证(Debuggable, Provable, Certifiable)
抽象良好,行为可预测,更容易进行形式验证和质量保证。
2. 硬件抽象(Hardware Abstraction)
- 语义固定,具体实现可自由切换
并行骨架定义了高层语义接口,底层可以针对不同硬件(CPU多核、GPU、分布式)选择最佳实现。 - 可组合性 ⇒ 层次化架构(Composability ⇒ Hierarchical architecture)
不同骨架可以组合形成复杂并行模式,支持分层设计,方便构建大型并行系统。
简单来说,并行骨架帮你把复杂的并行编程拆解成易管理、易重用的模块,同时屏蔽硬件细节,写出高效、可维护的并行代码。

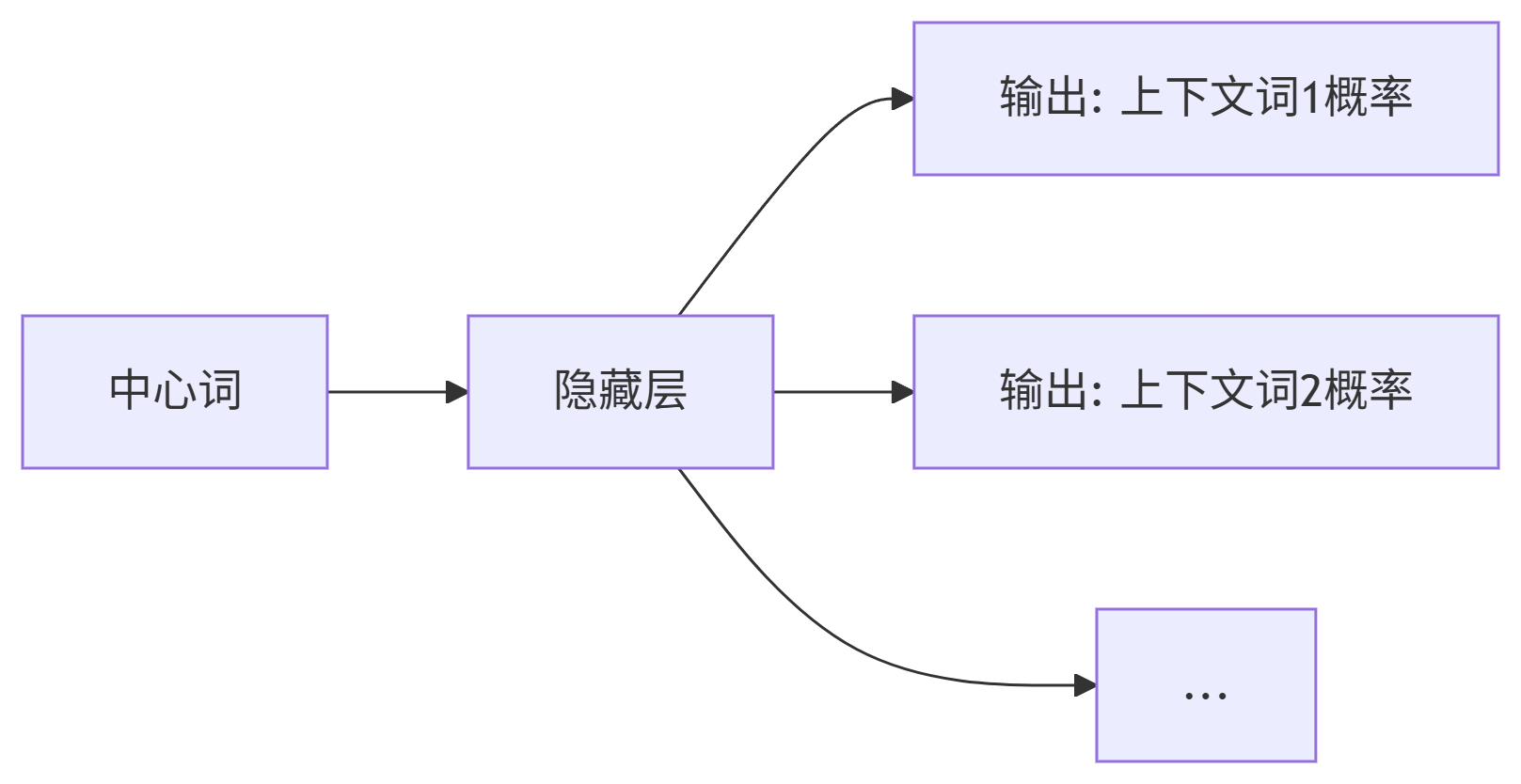
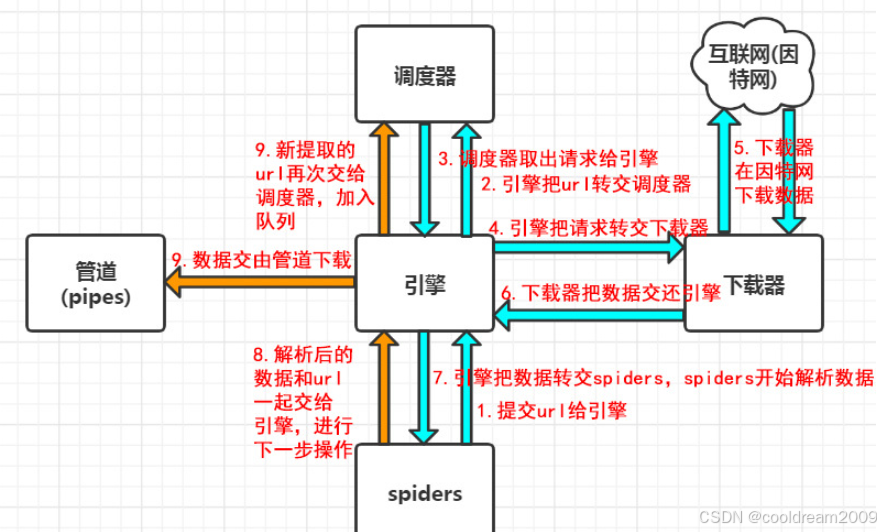
这张图片展示了一个由三个主要部分组成的系统架构:领域特定应用程序描述、生成组件和具体应用程序。
- 领域特定应用程序描述:以树形结构表示应用程序的结构,展示特定领域的需求或配置。
- 生成组件:包括“Translator”和“Parametric Sub-components”。Translator负责将领域描述转换为参数化子组件(各种形状),而Parametric Sub-components表示系统中使用的基本构建模块(例如:矩形、圆形、三角形等)。
- 具体应用程序:通过Translator转换后的子组件组合,生成具体的应用程序或结构(例如:复杂的几何形状组合)。
生成式编程(Generative Programming),以及它作为工具的相关技术和定义:
生成式编程作为工具(Generative Programming as a Tool)
可用技术(Available techniques)
- 专用编译器(Dedicated compilers)
设计专门的编译器来支持生成式编程。 - 外部预处理工具(External pre-processing tools)
在编译前对源码做自动生成和转换。 - 支持元编程的语言(Languages supporting meta-programming)
利用语言本身支持的元编程特性来实现代码生成。
元编程定义(Definition of Meta-programming)
- 元编程是编写程序,这些程序可以分析、转换并生成其他程序或自身,以程序作为数据进行操作。
C++元编程(C++ meta-programming)
- 利用C++的**模板子语言(template sub-language)**实现。
- 处理**类型(types)和整数常量(integral constants)**的编译时计算。
- 已被证明是图灵完备的(Turing-complete),也就是说,模板元编程理论上可以完成任何可计算任务。
总结:生成式编程通过元编程技术,实现了在编译期对代码的分析和生成,使得C++代码可以写得更加灵活高效,同时提升性能和表达力。
领域特定嵌入式语言(Domain Specific Embedded Languages, DSEL),主要内容如下:
什么是 DSEL?
- DSL(Domain Specific Language,领域特定语言)
是一种针对特定领域设计的声明式语言,简洁且易用,专门为该领域问题建模。 - DSEL(Domain Specific Embedded Language)
是将DSL嵌入到通用编程语言中的一种技术,比如C++里的DSEL。
C++ 中的 DSEL(EDSL)
- 依赖于运算符重载的“滥用”技术,也就是表达式模板(Expression Templates)。
- 可以在代码片段中携带语义信息,不仅仅是普通的计算,而是让代码本身“懂”它想表达的领域含义。
- 这样泛型实现(Generic implementation)能够自我感知优化机会。
- 利用静态抽象语法树(AST),在编译期对代码进行分析和生成:
- 表达式层面(expression level):进行代码生成
- 函数层面(function level):实现跨函数的优化(inter-procedural optimization)
总结:DSEL 通过嵌入式技术,让开发者用符合领域习惯的方式写代码,同时编译器可以根据这些表达的语义进行高级优化,从而达到高效又易用的目的。
**嵌入式领域特定语言(EDSL)**在C++中的应用,重点和优势如下:
EDSL 在 C++ 中的关键点
- 依赖运算符重载的“滥用”
例如通过 Boost.Proto 库,实现表达式模板的机制,把代码片段当成带语义的信息载体。 - 携带语义信息
代码不仅仅是执行动作,还在类型和表达式结构中携带了领域相关的语义。 - 泛型实现具备“自我感知”的优化能力
因为表达的语义在类型系统中,所以编译期可以根据语义做特定优化。
优势(Advantages)
- 能引入 DSL 而不破坏开发流程
不需要额外的工具链,只用现有的C++编译器和语言特性就能实现领域特定语言。 - 语义定义为类型信息,意味着可以在编译期解决
编译器可以在编译阶段进行静态推导和优化,提升性能和安全性。 - 还可以利用丰富的运行时绑定机制
兼顾灵活性和性能,结合编译期和运行时的优势。
总结:通过 C++ 的 EDSL,开发者可以无缝地在已有C++环境里构建专门领域的语言抽象,既享受DSL的表达简洁性,又保留C++的高性能和工具链兼容性。
表达式模板(Expression Templates) 在矩阵计算中的应用,重点如下:
关键点
- 代码示例:
matrix x(h,w), a(h,w), b(h,w); x = cos(a) + (b * a); - 编译器不会直接执行普通的逐元素操作,而是构建了一个元表达式树(meta-AST),表示这个计算过程:
expr< assign, expr<matrix&>, expr< plus, expr<cos, expr<matrix&>>, expr<multiplies, expr<matrix&>, expr<matrix&>> > >(x,a,b); - 这个树可以被编译器/库用来做任意变换,比如:
- 合并计算,减少临时变量
- 调度并行执行(比如用 OpenMP )
- 针对特定硬件做优化
运行时展开示例(伪代码):
#pragma omp parallel for
for(int j=0; j < h; ++j) {
for(int i=0; i < w; ++i) {
x(j,i) = cos(a(j,i)) + (b(j,i) * a(j,i));
}
}
总结
表达式模板通过静态构建表达式树,让编译器能够:
- 避免创建临时矩阵,减少内存开销
- 实现自动向量化、并行化等优化
- 在编译期对代码做重写,提高性能
这是一种非常强大且高效的元编程技术,广泛应用于线性代数库如 Eigen、Blaze 等。
“并行领域专用嵌入式语言(Parallel DSEL)”在实际中的应用,核心内容总结如下:
目标 (Objectives)
- 利用DSEL生成技术,针对不同硬件进行代码生成
- 展示抽象层带来的低性能开销(低成本抽象)
- 演示并行骨架(skeletons)的可用性和效果
贡献 (Our contribution)
- BSP++
通用C++ BSP(Bulk Synchronous Parallel)框架,支持共享内存和分布式内存架构 - Quaff
针对并行骨架编程的领域专用语言 - Boost.SIMD
便携式SIMD编程的DSEL,方便使用SIMD指令集实现向量化 - NT2
类MATLAB的科学计算DSEL,简洁高效,支持向量化和并行化
总结
这些项目结合了DSEL和并行编程技术,解决了如何用高层抽象同时保证效率的问题。它们通过模板元编程和代码生成技术,支持多种硬件,方便科学计算领域的开发者写出高性能且可维护的代码。
NT2,这是一个科学计算库,核心特点总结如下:
NT2 概述
- 科学计算库,目标是简化数值计算,提供类似 MATLAB 的简洁接口
- 高性能:提供高效的计算基本单元和操作原语,保证计算性能
- 易扩展:设计灵活,方便用户和开发者扩展功能
组成部分
- Boost.SIMD
利用Boost.SIMD实现底层向量化优化,充分发挥CPU SIMD指令集优势 - 递归并行骨架
利用并行骨架(parallel skeletons),递归分解任务,实现高效的并行执行 - 架构与运行时无关
代码设计上与硬件架构和具体运行时解耦,提高移植性和灵活性
总结
NT2通过现代C++模板元编程和DSEL技术,将用户友好的接口和底层高性能结合起来,非常适合科研人员和工程师进行大规模科学计算。
The Numerical Template Toolbox (NT2) 的核心设计理念和使用流程:
核心原则
- table<T,S> 类型
一个简单的多维数组类模板,行为和 MATLAB 的数组一模一样 - 丰富的函数库
超过500个函数,既可以作用于 table(数组),也可以作用于标量,接口和 MATLAB 非常接近
使用流程
- 拿一个 MATLAB 的
.m文件 - 复制改写成
.cpp文件 - 在代码开头添加:
并做必要的格式(语法)调整#include <nt2/nt2.hpp> - 编译这个
.cpp文件并链接到libnt2.a静态库 - 完成,程序即可高效运行,且几乎和 MATLAB 代码一样简单
总结
NT2 就像是 MATLAB 的 C++ 版本,让用户可以用接近 MATLAB 的风格写高性能 C++ 数值计算程序,兼顾易用性和速度。
这段代码展示了如何用 MATLAB 代码表达数值计算,具体是:
MATLAB代码含义:
A1 = 1:1000; % 生成向量 A1,包含1到1000的整数
A2 = A1 + randn(size(A1)); % A2 = A1 + 正态分布随机噪声,长度与A1相同
X = lu(A1*A1'); % 计算矩阵 A1*A1' 的 LU 分解
rms = sqrt(sum(sqr(A1(:)-A2(:))) / numel(A1)); % 计算 A1 和 A2 差的均方根误差
这里每步操作:
1:1000生成 1 到 1000 的行向量randn(size(A1))生成与 A1 同尺寸的正态分布随机值A1*A1'是向量与其转置的乘积,生成一个 1000×1000 矩阵lu(...)是矩阵的 LU 分解A1(:)和A2(:)都是把矩阵转换成列向量sqr(...)是逐元素平方sum(...)是求和numel(A1)是元素个数,1000sqrt(...)是平方根
NT2 里写法(伪代码风格)
#include <nt2/nt2.hpp>
nt2::table<double> A1 = nt2::_(1,1000); // 创建1到1000的数组
nt2::table<double> A2 = A1 + nt2::randn(nt2::size(A1)); // 加噪声
auto X = nt2::lu(A1 * nt2::trans(A1)); // LU分解
auto diff = A1 - A2;
double rms = nt2::sqrt(nt2::sum(nt2::sqr(nt2::reshape(diff, nt2::numel(A1), 1))) / nt2::numel(A1));
C++ 代码用 NT2 库,实现了与之前 MATLAB 代码几乎相同的功能。详细说明如下:
table<double> A1 = _(1., 1000.); // 创建一个从1到1000的数组(向量)
table<double> A2 = A1 + randn(size(A1)); // 给A1加上正态随机噪声,生成A2
table<double> X = lu(mtimes(A1, trans(A1))); // 计算A1乘以转置A1的矩阵乘积,并对结果做LU分解
double rms = sqrt(sum(sqr(A1(_) - A2(_))) / numel(A1)); // 计算A1与A2差值的均方根误差
各部分解释:
_(1., 1000.):生成从1到1000的数组,类似 MATLAB 的1:1000。randn(size(A1)):生成和 A1 同样大小的正态分布随机数组。mtimes(A1, trans(A1)):矩阵乘法,trans(A1)是转置。lu(...):LU分解函数。A1(_)、A2(_):NT2 里“全部元素”的语法,类似A1(:)。sqr:逐元素平方。sum:求和。numel(A1):元素个数。
整体来说:
NT2通过重载操作符和提供类似 MATLAB 的API,让C++也能像MATLAB一样写矩阵和向量运算,且支持高效编译。
Motion Detection
table<char> sigma_delta(table<char>& background, table<char> const& frame, table<char>& variance) {
// Estimate Raw Movement
background = selinc(background < frame, seldec(background > frame, background));
table<char> diff = dist(background, frame);
// Compute Local Variance
table<char> sig3 = muls(diff, 3);
var = if_else(diff != 0, selinc(variance < sig3, seldec(var > sig3, variance)), variance);
// Generate Movement Label
return if_zero_else_one(diff < variance);
}
这段代码描述的是一个 Sigma-Delta运动检测算法 的 NT2 实现,它是一种用于视频分析的轻量级背景建模方法,适合在低功耗、嵌入式设备中使用(例如机器人视觉、安防监控等)。下面是代码分段讲解:
背景
- 该算法用于检测运动物体。
- 不使用浮点数,仅使用小范围整数(如
char),以便提升性能并减少资源使用。 - 目标是用 SIMD 向量化库(NT2)进行高效实现。
代码功能分解:
background = selinc( background < frame,
seldec(background > frame, background) );
1. 背景模型更新
selinc/seldec是 条件自增/自减。background向当前帧frame靠拢:- 如果当前帧更亮,则背景变亮;
- 如果当前帧更暗,则背景变暗;
- 这是 Sigma-Delta 的核心建模步骤。
table<char> diff = dist(background, frame);
2. 差值计算
dist计算每个像素点当前帧与背景之间的差值(绝对值)。
table<char> sig3 = muls(diff,3);
3. 扩大差值
- 将差值乘3,用于调整容差窗口(threshold);
muls是饱和乘法,防止溢出。
var = if_else( diff != 0,
selinc(variance < sig3,
seldec(var > sig3, variance)),
variance);
4. 更新局部方差(variance)
- 如果有差异(
diff != 0),则:- 如果当前方差过小,则递增;
- 如果过大,则递减;
- 否则,保持不变。
return if_zero_else_one( diff < variance );
5. 输出运动掩码
- 比较差值是否小于方差(在容差范围内 → 认为是背景);
if_zero_else_one产生 0/1 掩码(1 表示运动,0 表示无变化)。
总结
| 步骤 | 含义 |
|---|---|
| 背景建模 | background 向 frame 靠拢 |
| 差值计算 | 估计当前帧与背景差异 |
| 方差调整 | 根据信号变化动态调整容差 |
| 运动检测 | 若变化超出容差,则为“运动” |
| 该算法结构简单但实用,且易于并行和 SIMD 化,适用于资源受限场景。 |
NT2(Numerical Template Toolbox)库编写的 Black-Scholes 期权定价公式 的两种版本:
- 普通版(直接表达式计算)
- Loop Fusion 优化版(缓存友好、更高性能)
背景:Black-Scholes 模型公式
欧式看涨期权定价公式如下:
C
=
S
⋅
N
(
d
1
)
−
X
⋅
e
−
r
T
⋅
N
(
d
2
)
C = S \cdot N(d_1) - X \cdot e^{-rT} \cdot N(d_2)
C=S⋅N(d1)−X⋅e−rT⋅N(d2)
其中:
d
1
=
ln
(
S
/
X
)
+
(
r
+
1
2
v
2
)
T
v
T
,
d
2
=
d
1
−
v
T
d_1 = \frac{\ln(S/X) + (r + \frac{1}{2}v^2)T}{v\sqrt{T}}, \quad d_2 = d_1 - v\sqrt{T}
d1=vTln(S/X)+(r+21v2)T,d2=d1−vT
-
S
S
S: 当前资产价格 (
Sa) -
X
X
X: 执行价格 (
Xa) -
T
T
T: 到期时间 (
Ta) -
r
r
r: 无风险利率 (
ra) -
v
v
v: 波动率 (
va) -
N
(
⋅
)
N(\cdot)
N(⋅): 标准正态累积分布函数 (
normcdf)
普通版代码:直接链式表达式
table<float> blackscholes(table<float> const& Sa,
table<float> const& Xa,
table<float> const& Ta,
table<float> const& ra,
table<float> const& va) {
table<float> da = sqrt(Ta);
table<float> d1 = log(Sa / Xa) + (sqr(va) * 0.5f + ra) * Ta / (va * da);
table<float> d2 = d1 - va * da;
return Sa * normcdf(d1) - Xa * exp(-ra * Ta) * normcdf(d2);
}
优点:简洁、可读性强
缺点:每一步可能创建中间临时变量,性能可能受影响,特别是 多次遍历内存,对 CPU cache 不友好。
Loop Fusion 优化版
table<float> blackscholes(table<float> const& Sa, table<float> const& Xa,
table<float> const& Ta, table<float> const& ra,
table<float> const& va) {
// 预分配表(避免反复申请内存)
table<float> da(extent(Ta)), d1(extent(Ta)), d2(extent(Ta)), R(extent(Ta));
// tie + expression templates 实现 loop fusion
tie(da, d1, d2, R) = tie(
sqrt(Ta),
log(Sa / Xa) + (sqr(va) * 0.5f + ra) * Ta / (va * sqrt(Ta)), // 注意此处da是并行绑定的
d1 - va * da,
Sa * normcdf(d1) - Xa * exp(-ra * Ta) * normcdf(d2)
);
return R;
}
优化点详解
tie(...) = tie(...):- 这是 NT2 的一个 loop fusion 技巧,可以让多个数组的元素计算在一个循环内完成。
- 提高缓存局部性(cache locality)和流水线效率
- 减少临时变量和内存分配开销
- 显式管理中间变量 (
da,d1,d2) 可以在后续重用或进一步优化
总结对比
| 版本 | 优点 | 缺点 |
|---|---|---|
| 普通表达式 | 简洁、易读 | 中间变量多、可能缓存不友好 |
| Loop Fusion | 高性能、单遍多算 | 可读性差一点、维护难度略高 |
| 如果你想深入实践这个例子,我还可以给你: |
- OpenMP 或 CUDA 后端扩展方式(基于 NT2)
- 对比测试结果模板(性能评估)
- 更详细解释 tie / extent / normcdf 的底层实现










![MCP:让AI工具协作变得像聊天一样简单 [特殊字符]](https://i-blog.csdnimg.cn/direct/e09176c05a7144f8982a633e92c816ca.png)