1. 从官网下载 IsaacSim 4.2.0 安装包
https://download.isaacsim.omniverse.nvidia.com/isaac-sim-standalone%404.2.0-rc.18%2Brelease.16044.3b2ed111.gl.linux-x86_64.release.zip
2. 查阅 Workstation Installation 安装方式
Workstation Installation — Isaac Sim Documentation
官方提供的是 IsaacSim 4.5.0 的 安装命令,对于 IsaacSim 4.2.0 ,调整执行如下命令行:
mkdir ~/isaacsim
cd ~/Downloads
unzip isaac-sim-standalone@4.2.0-rc.18+release.16044.3b2ed111.gl.linux-x86_64.release.zip -d ~/isaacsim
cd ~/isaacsim
./omni.isaac.sim.post.install.sh
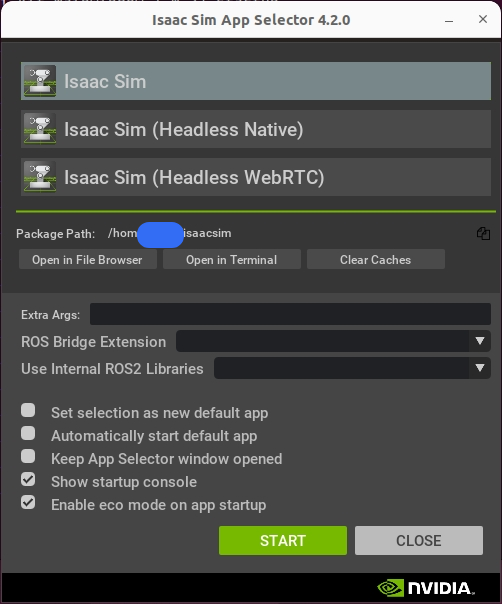
./isaac-sim.selector.sh其中,执行 ./omni.isaac.sim.post.install.sh 需要等待一段时间,完成后终端输出信息为:
最后 ./isaac-sim.selector.sh 弹出如下窗口:
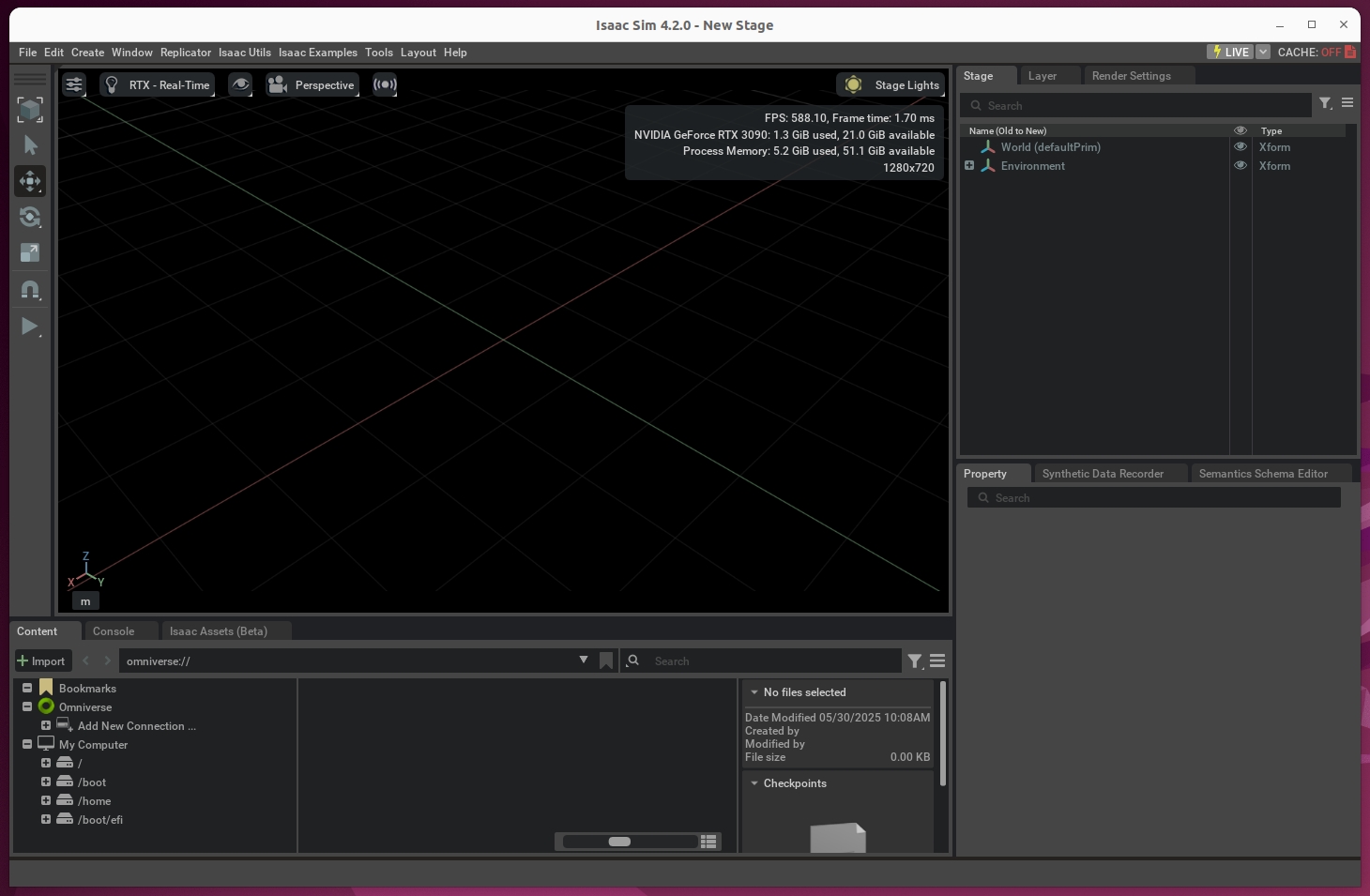
点击 START ,即可弹出如下窗口:
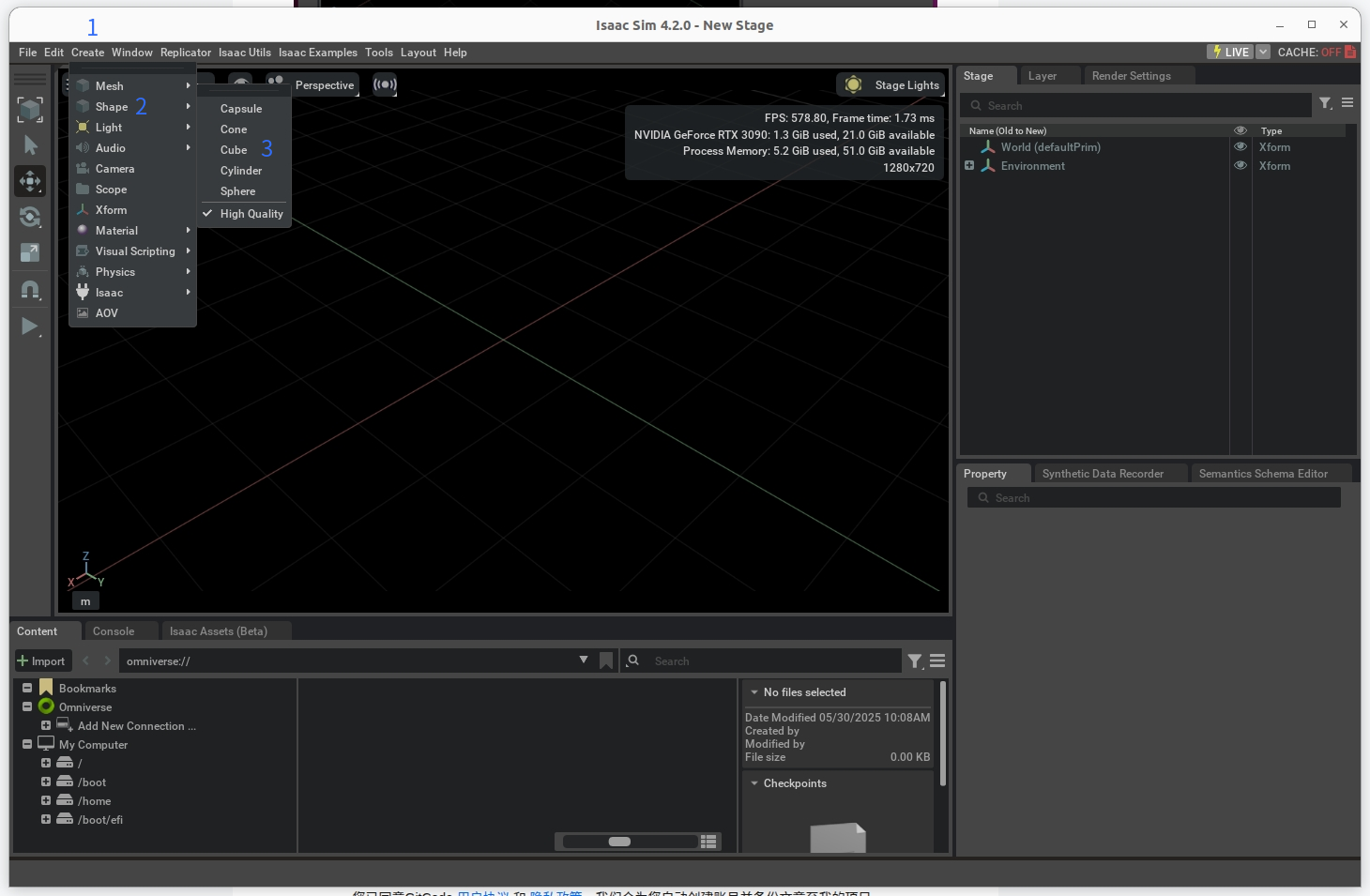
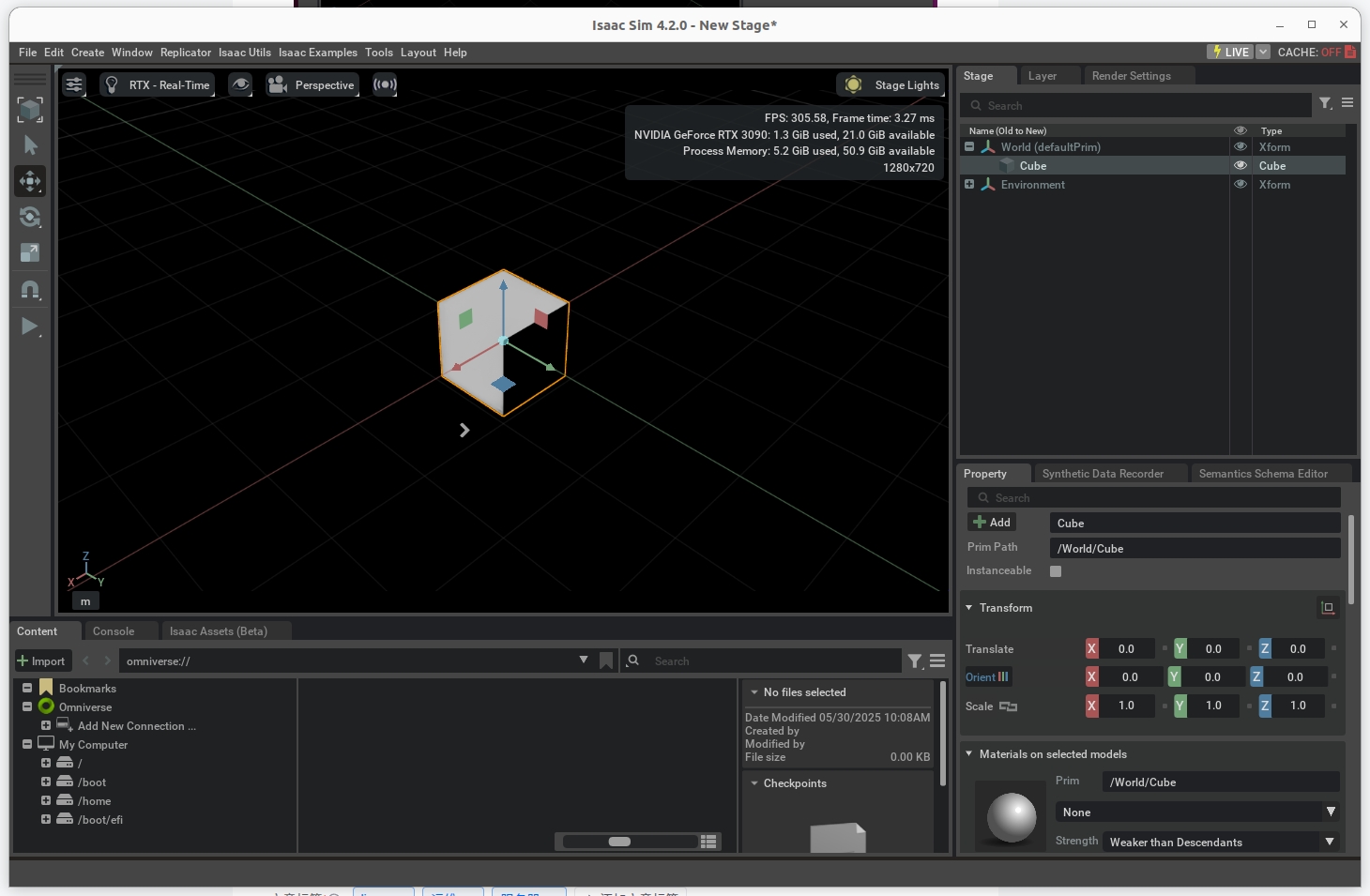
3. 简单操作验证功能
如下所示,以此点击 Create -> Shape -> Cube ,可以在屏幕中看到成功创建出的方块
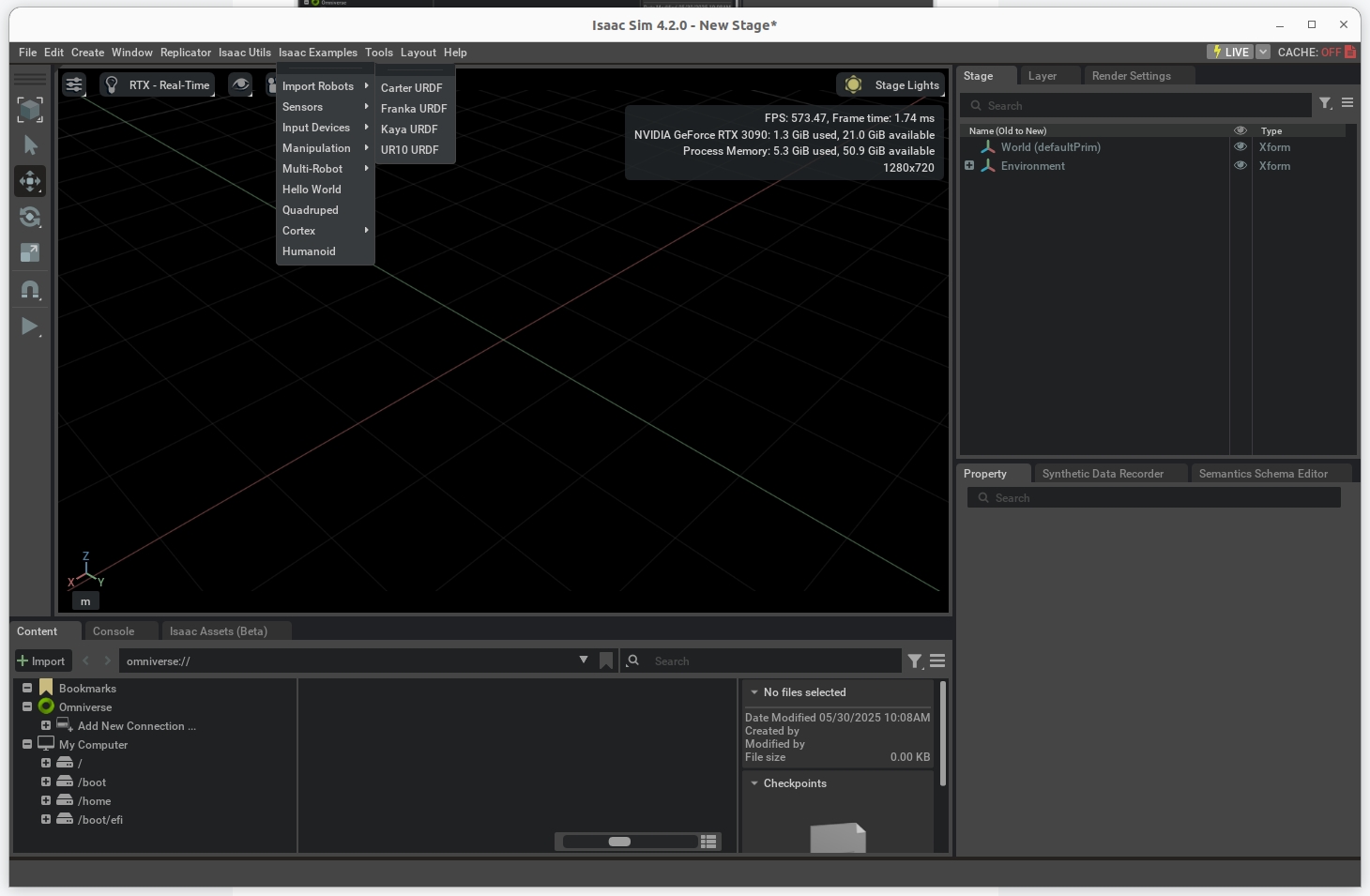
也可以依次点击 Isaac Examples -> Import Robots -> Franka URDF ,在弹出的 Import Franka 小窗口里,点击 LOAD ,可以在屏幕中看到成功导入的 Franka 机械臂。
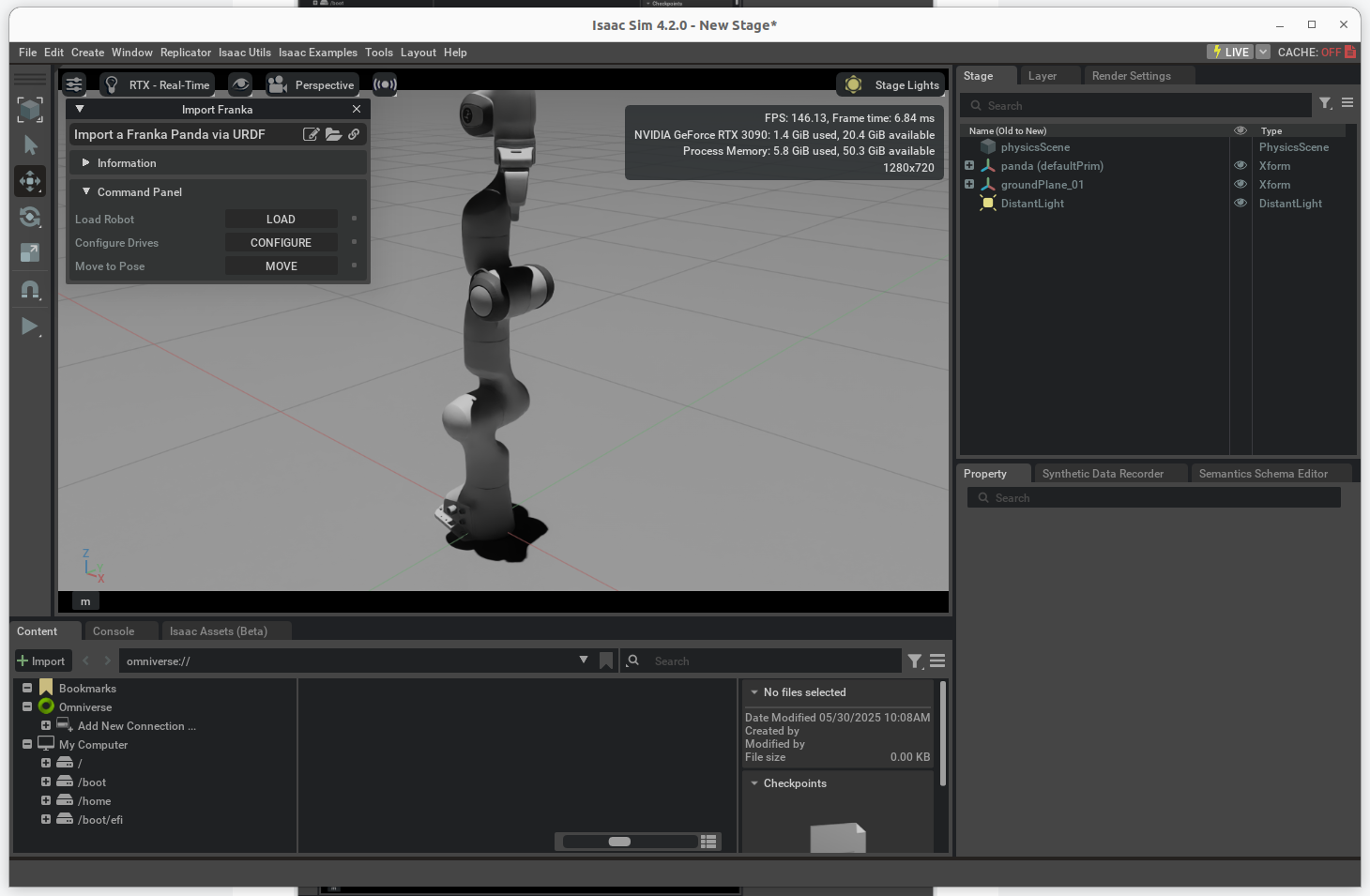
大功告成 ~