目录
- 一、STM32G4 电机外设篇(三) TIM1 发波 和 ADC COMP DAC级联
- 1 TIM1 高级定时器发波
- 1.1 stm32cubemx配置
- 2 TIM1 ADC COMP DAC级联
- 2.1 stm32cubemx配置
- 附学习参考网址
- 欢迎大家有问题评论交流 (* ^ ω ^)
一、STM32G4 电机外设篇(三) TIM1 发波 和 ADC COMP DAC级联
1 TIM1 高级定时器发波
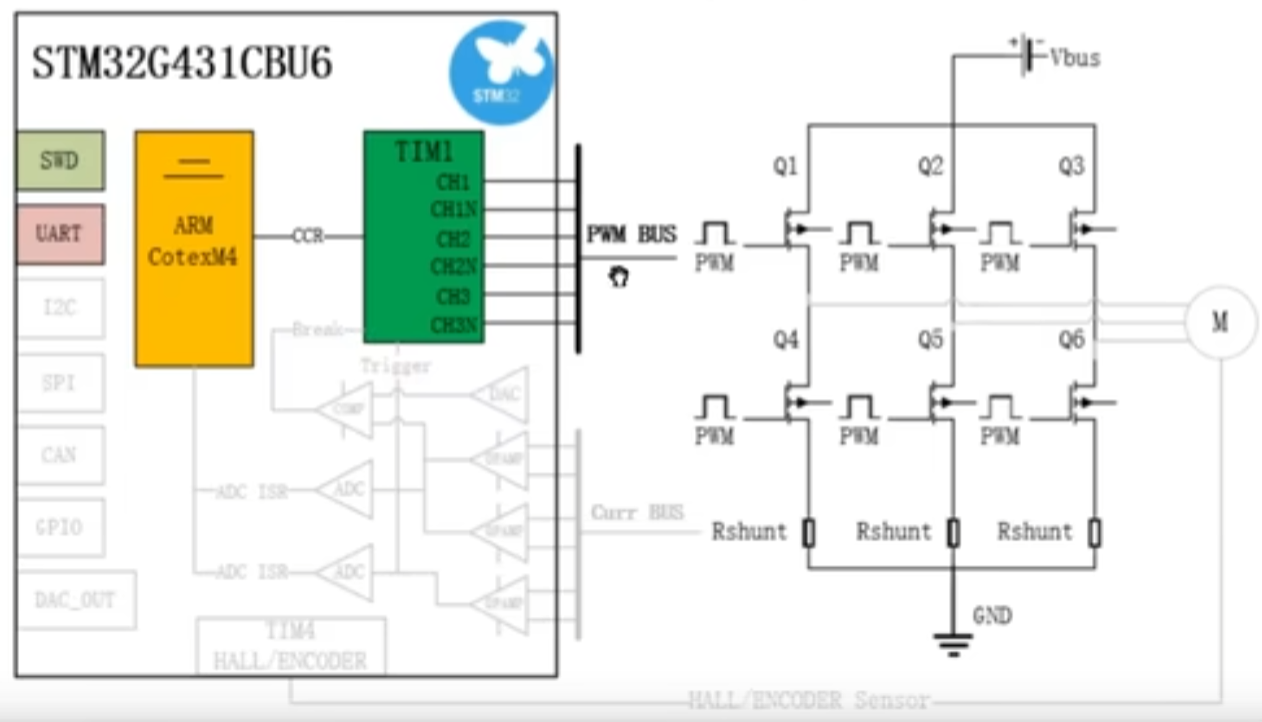
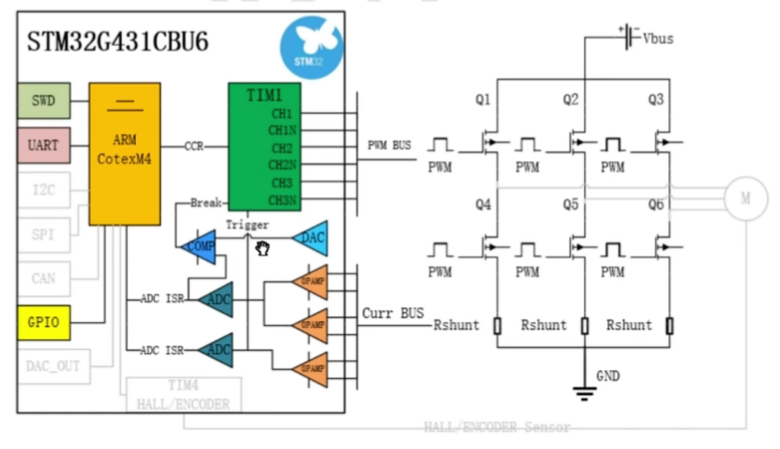
- 本章接线图详见之前的文章,记住要断开三相电机的uvw接线,否则输出的pwm波会影响电机
1.1 stm32cubemx配置
-
本实验计划使用TIM1发出3对互补的PWM波,来模拟驱动电机
-
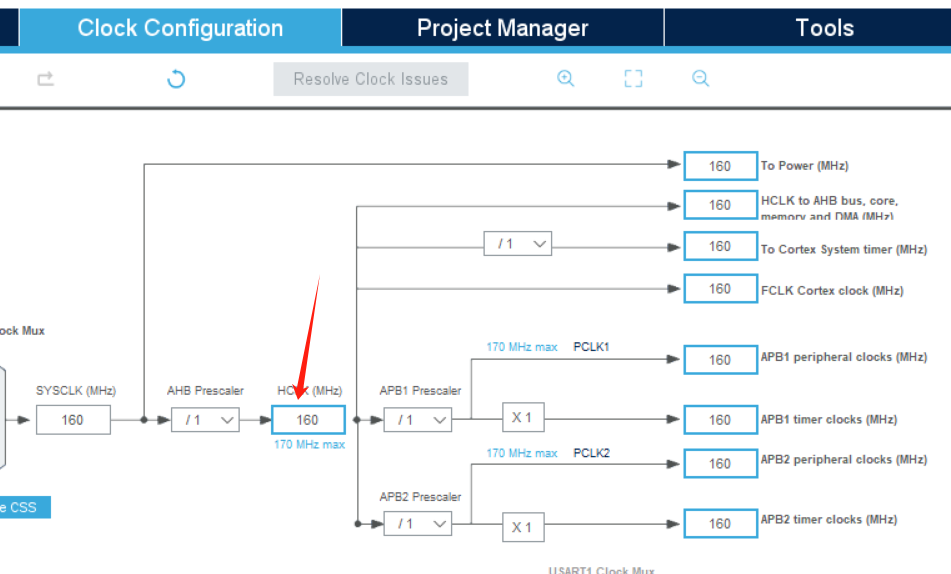
打开之前文章的STM32CubeMx,配置时钟源和TIM1
-
使用通道4触发ADC采样,配置PWM但是不输出
-
RCR设置为1
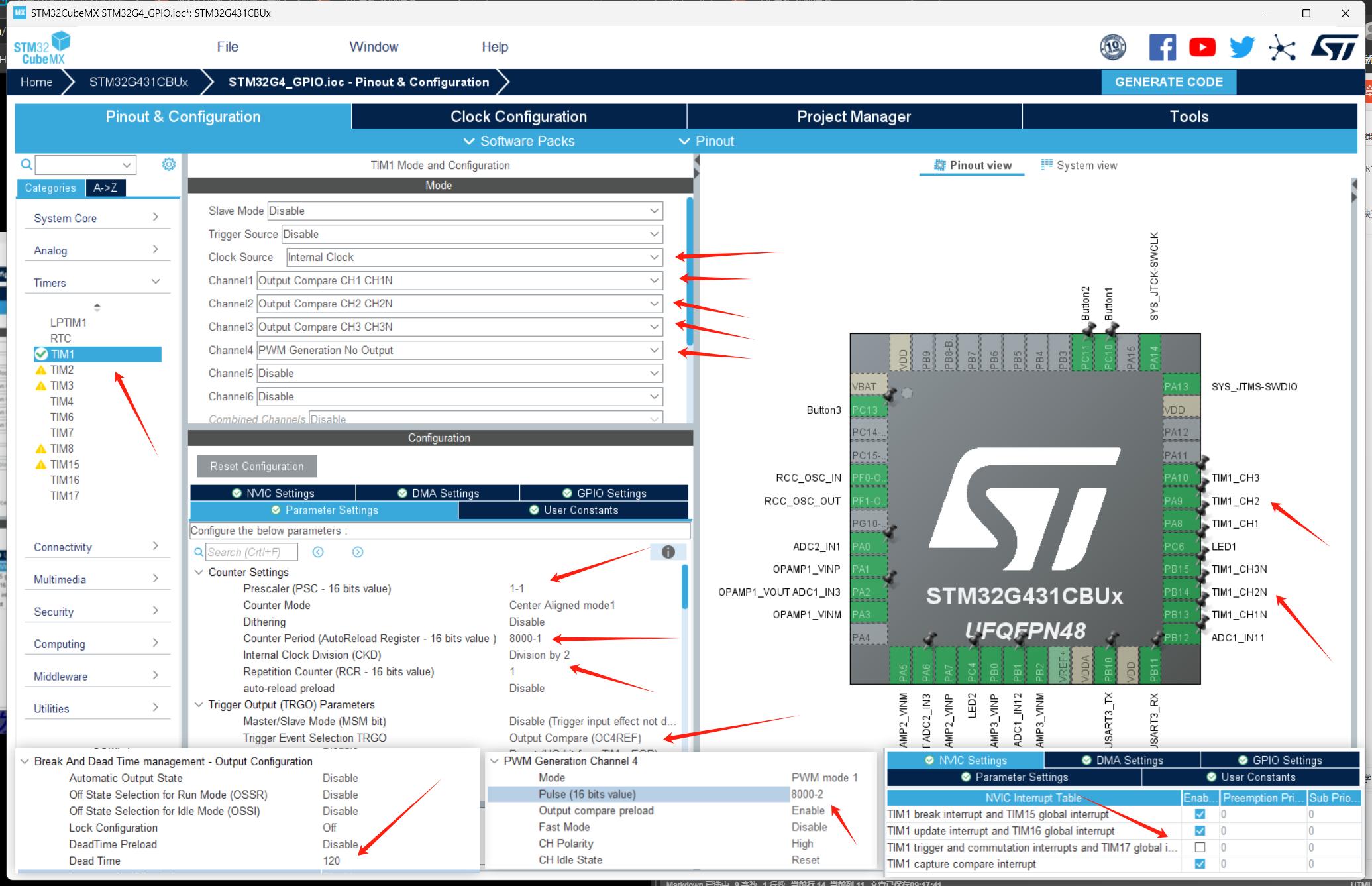
-
RCR可以理解为一个队计时器触发频率的分频
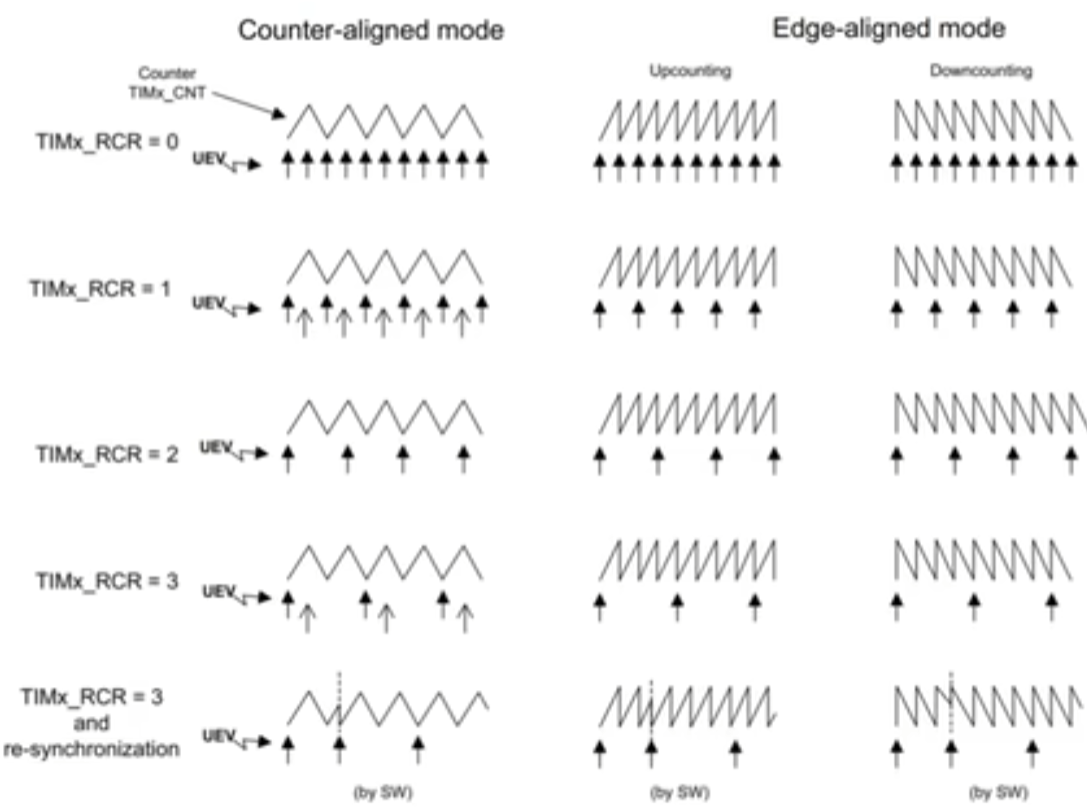
-
设置完成后打开keil文件,修改代码
- 注释User Code 4中的中断处理函数,约在291行
//User Code PV中修改
float temp[3];
uint8_t tempData[16] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0x80,0x7F};
//User Code 2中修改
HAL_OPAMP_Start(&hopamp1);//使能运放
HAL_OPAMP_Start(&hopamp2);
HAL_OPAMP_Start(&hopamp3);
HAL_UART_Receive_IT(&huart3, (uint8_t *)&aRxBuffer, 1);
HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED);//自校验,减少采样误差
HAL_ADCEx_Calibration_Start(&hadc2,ADC_SINGLE_ENDED);
TIM1->PSC = 30000;
TIM1->ARR = 10000;
TIM1->CCR1 = 2000;
TIM1->CCR2 = 5000;
TIM1->CCR3 = 8000;
HAL_TIM_Base_Start(&htim1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_3);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_2);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_3);
/* USER CODE BEGIN WHILE */修改
while(1)
{
// HAL_ADC_Start(&hadc1);
// HAL_ADC_Start(&hadc2);//使能规则组转捿
// HAL_ADCEx_InjectedStart_IT(&hadc1);
// HAL_ADCEx_InjectedStart_IT(&hadc2);//使能规则组转换,并产生注入组中断
// temp[0] = HAL_ADC_GetValue(&hadc1);
// temp[1] = HAL_ADC_GetValue(&hadc2) * 0.02094726f; //根据分压电阻计算
// memcpy(tempData, (uint8_t *)&temp, sizeof(temp));
// HAL_UART_Transmit_DMA(&huart3, (uint8_t *)tempData, 24);
// HAL_Delay(1);
if((GPIOA->IDR & GPIO_PIN_8)!=0)
{
temp[0] = 1.0f;
}
else
{
temp[0] = 0.0f;
}
if((GPIOA->IDR & GPIO_PIN_9)!=0)
{
temp[1] = 3.0f;
}
else
{
temp[1] = 2.0f;
}
if((GPIOA->IDR & GPIO_PIN_10)!=0)
{
temp[2] = 5.0f;
}
else
{
temp[2] = 4.0f;
}
memcpy(tempData, (uint8_t *)&temp, sizeof(temp));
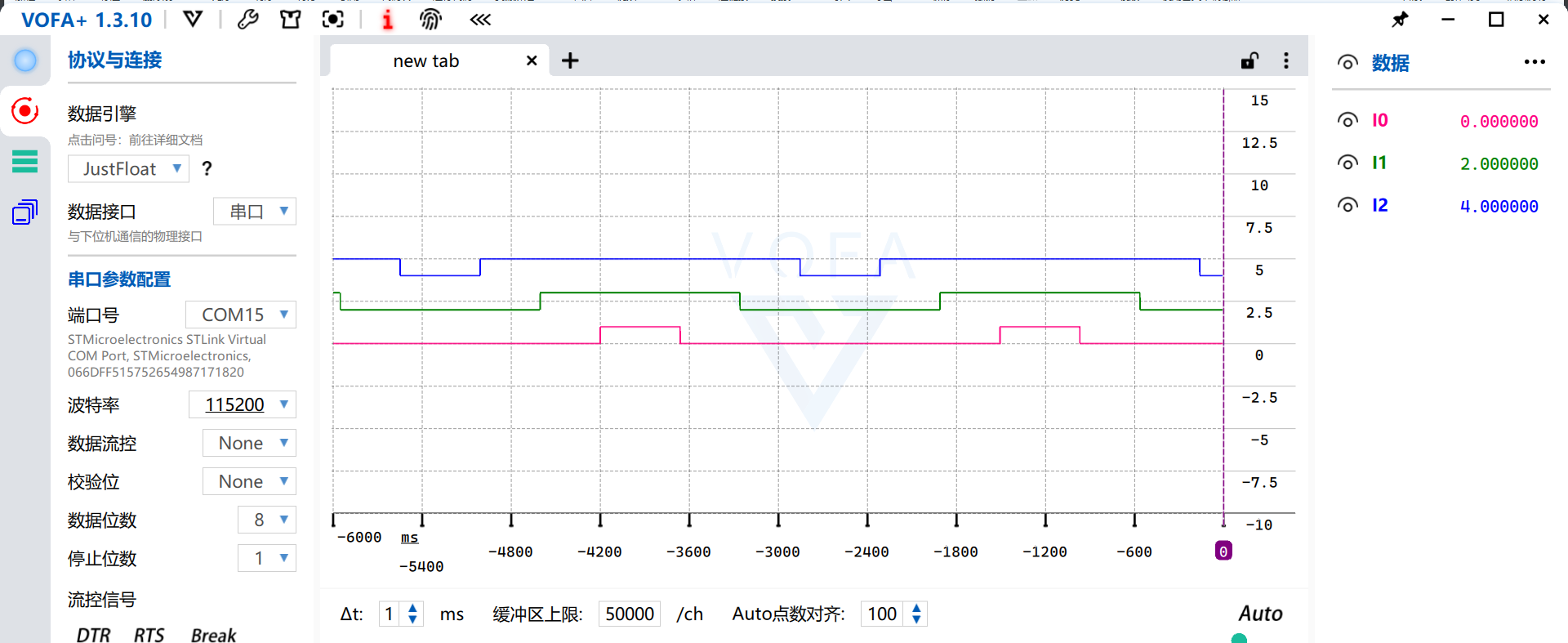
HAL_UART_Transmit_DMA(&huart3, (uint8_t *)tempData, 16);
}
/* USER CODE END WHILE */
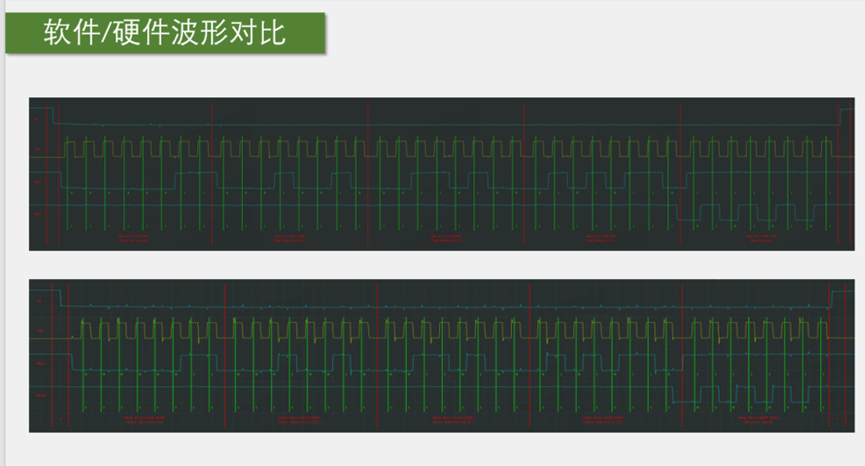
- 打开VOFA,就能看到成功的PWM曲线图像
2 TIM1 ADC COMP DAC级联
- 电机控制环路主要涉及的外设功能包含高级定时器TIM1的发波,OPAMP 及 ADC 准确的采样三相电流,并在三相电流过流时及时封波,避免损坏硬件
- 本文将会使用STM32G4内部 TIM1ADCCOMP DAC级联使用
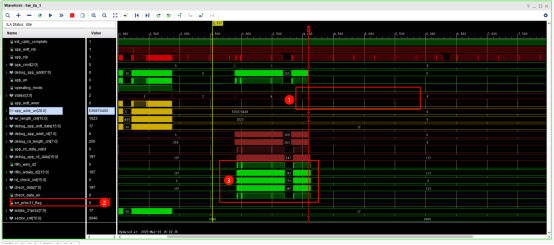
- TIM1 发波时序和电流采样触发
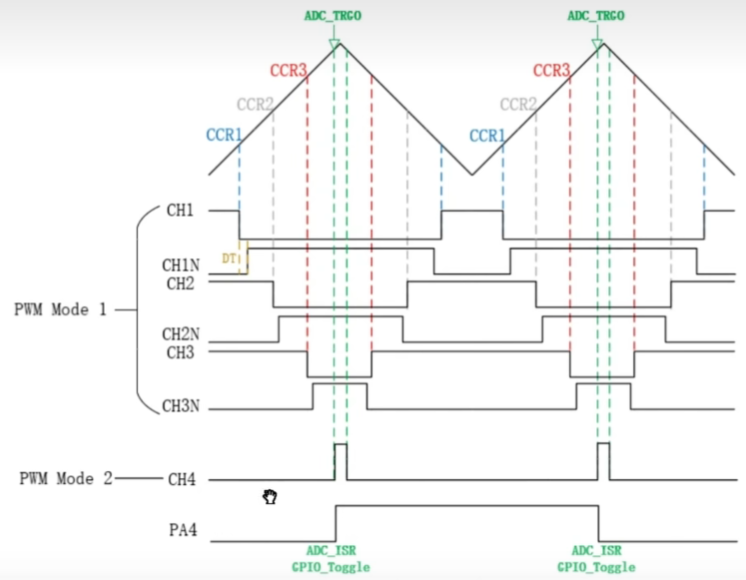
- 在最高点前一点采样,因为采样需要一个短暂的时间,这个时间段电流最稳定
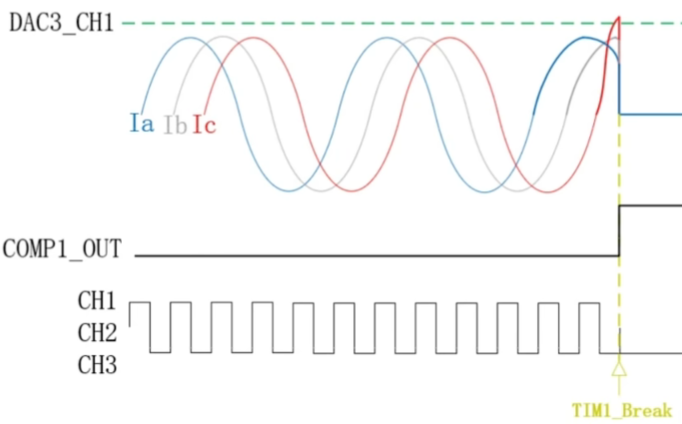
- 三相电流过流封波时序
2.1 stm32cubemx配置
-
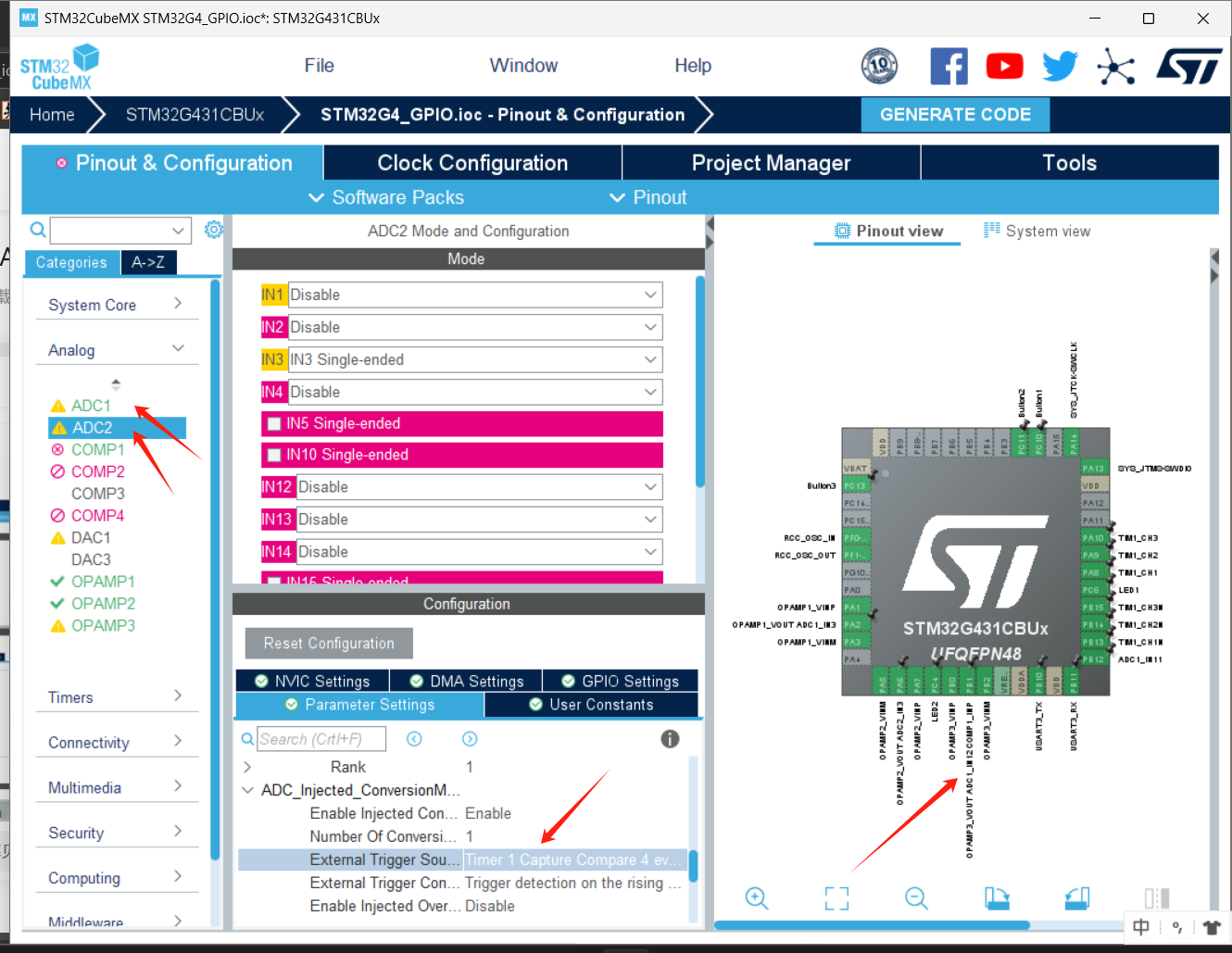
在上一章的工程基础上增加TIM1通道4的触发源,作为ADC电流采样注入组的触发源,分别修改ADC1和ADC2的注入组转换触发源为TIM1比较4事件,增加PB1引脚功能
-
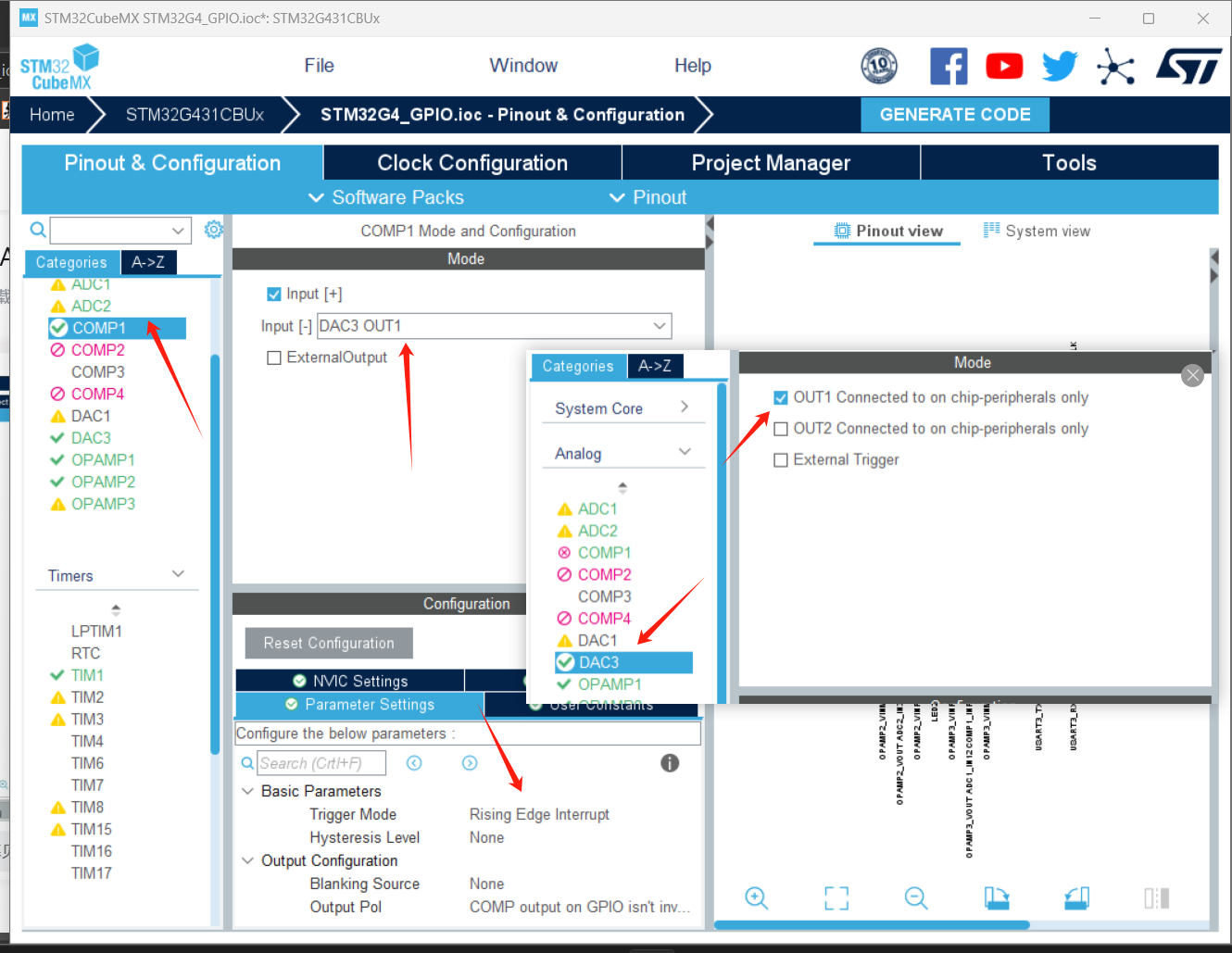
设置DAC_CHI连接MCU内部外设,其它参数默认
-
使能比较器负向为DAC3,触发方式为上升沿触发
-
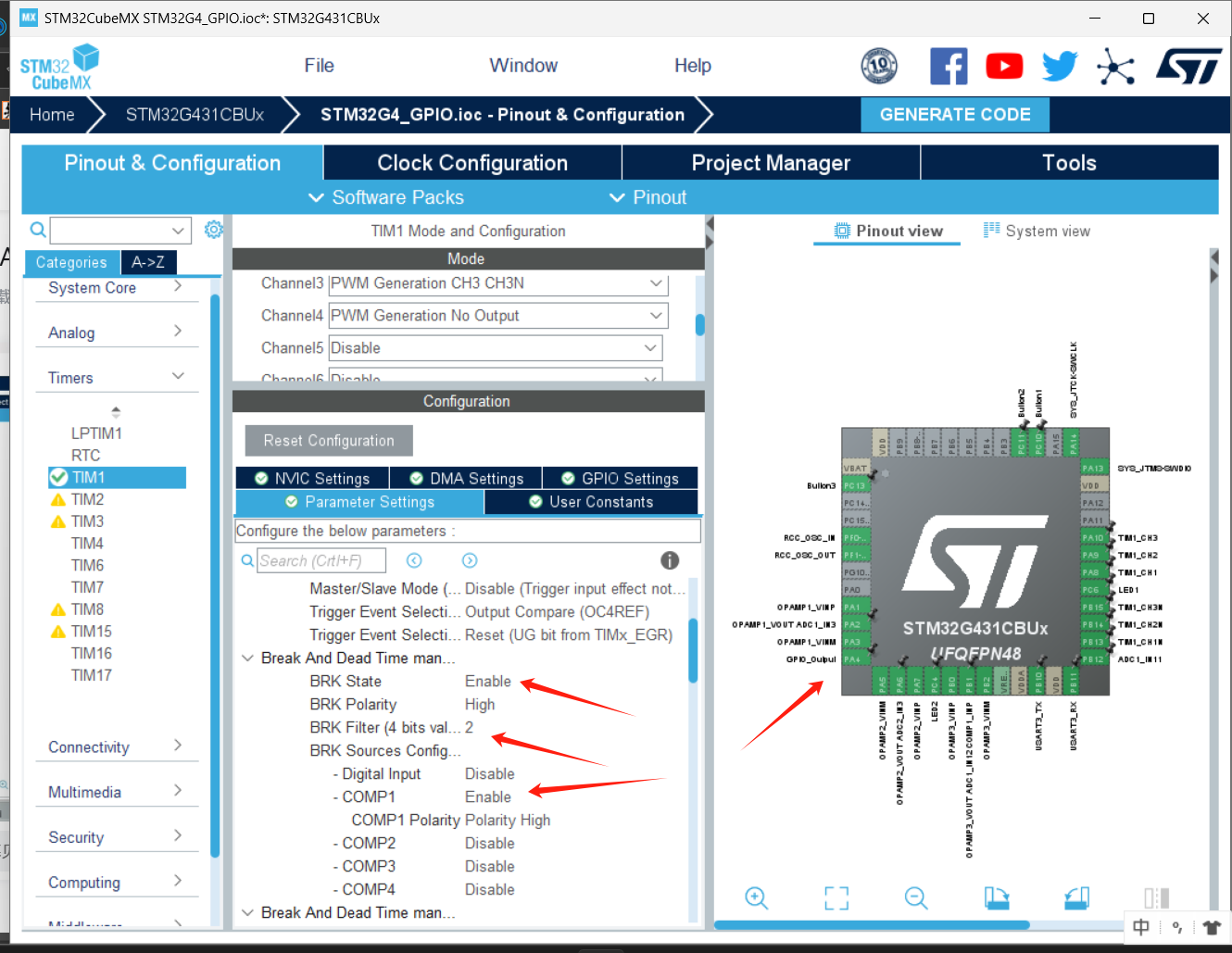
设置封波实现的break触发,设置GPIO4,生成代码,
-
打开Keil软件修改代码
uint8_t adc1_in1, adc1_in2, adc1_in3;
float IA, IB, IC;
uint8_t ADC_offset, IA_Offset, IB_Offset, IC_Offset;
float load_data[5];
float temp[5];
uint8_t tempData[24] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0x80,0x7F};
/* USER CODE BEGIN 2 */
HAL_OPAMP_Start(&hopamp1);//使能运放
HAL_OPAMP_Start(&hopamp2);
HAL_OPAMP_Start(&hopamp3);
HAL_UART_Receive_IT(&huart3, (uint8_t *)&aRxBuffer, 1);
HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED);//自校验,减少采样误差
HAL_ADCEx_Calibration_Start(&hadc2,ADC_SINGLE_ENDED);
TIM1->ARR = 8000-1;
TIM1->CCR4 = 8000-2;
HAL_TIM_Base_Start(&htim1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_4);
HAL_ADCEx_InjectedStart_IT(&hadc1);
HAL_ADCEx_InjectedStart(&hadc2);
HAL_DAC_Start(&hdac3, DAC_CHANNEL_1);
HAL_DAC_SetValue(&hdac3, DAC_CHANNEL_1, DAC_ALIGN_12B_R, 3000);
HAL_COMP_Start(&hcomp1);
/* USER CODE BEGIN WHILE */
while(1)
{
HAL_ADC_Start(&hadc1);
HAL_ADC_Start(&hadc2);
Vpoten = HAL_ADC_GetValue(&hadc1);
adc_vbus = HAL_ADC_GetValue(&hadc2);
Vbus = adc_vbus * 3.3f/4096*26;
HAL_Delay(10);
}
/* USER CODE BEGIN 4 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(GPIO_Pin);
if(Button2_Pin == GPIO_Pin)
{
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_3);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);
}
if(Button3_Pin == GPIO_Pin)
{
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_2);
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_3);
HAL_TIMEx_PWMN_Stop(&htim1, TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Stop(&htim1, TIM_CHANNEL_2);
HAL_TIMEx_PWMN_Stop(&htim1, TIM_CHANNEL_3);
}
}
//注入中断处理程序
void HAL_ADCEx_InjectedConvCpltCallback(ADC_HandleTypeDef *hadc)
{
static uint8_t cnt;
/* Prevent unused argument(s)compilation warning */
UNUSED(hadc);
if(hadc == &hadc1)
{
if(ADC_offset == 0)
{
cnt++;
adc1_in1 = hadc1.Instance->JDR1;
adc1_in2 = hadc2.Instance->JDR1;
adc1_in3 = hadc1.Instance->JDR2;
IA_Offset += adc1_in1;
IB_Offset += adc1_in2;
IC_Offset += adc1_in3;
if(cnt >= 10)
{
ADC_offset =1;
IA_Offset = IA_Offset/10;
IB_Offset = IB_Offset/10;
IC_Offset = IC_Offset/10;
}
}
else
{
adc1_in1 = hadc1.Instance->JDR1;
IA = (adc1_in1 - IA_Offset)*0.0193359375f;
adc1_in2 = hadc2.Instance->JDR1;
IB = (adc1_in2 - IB_Offset)*0.0193359375f;
adc1_in3 = hadc1.Instance->JDR2;
IC = (adc1_in3 - IC_Offset)*0.0193359375f;
TIM1->CCR1= 2000;
TIM1->CCR2= 4000;
TIM1->CCR3= 6000;
load_data[0] = IA;
load_data[1] = IB;
load_data[2] = IC;
load_data[3]= 0;
load_data[4]= 0;
memcpy(tempData,(uint8_t*)&load_data, sizeof(load_data));
HAL_UART_Transmit_DMA(&huart3,(uint8_t *)tempData, 6*4);
}
}
}
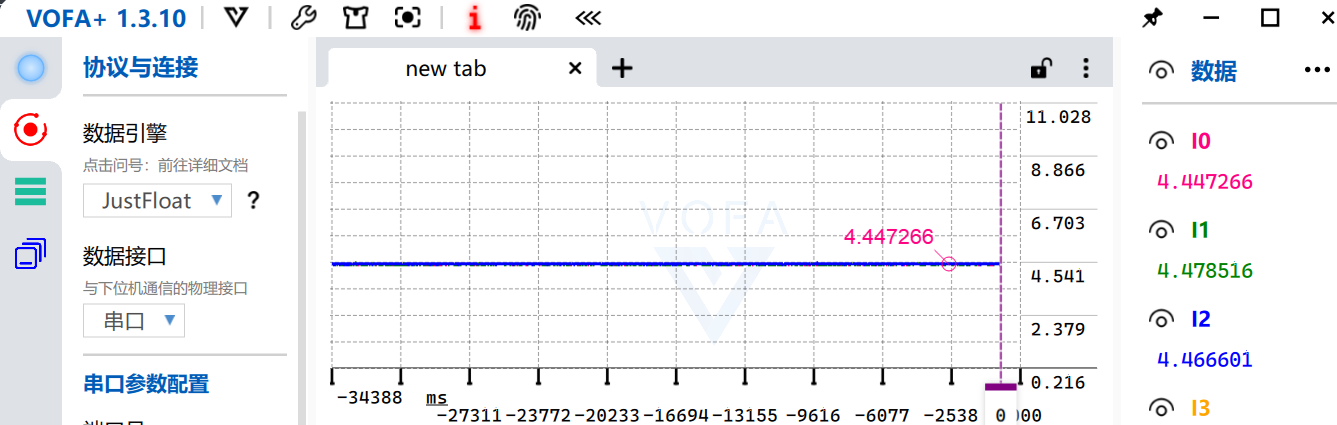
- 不知道为啥产生了一个4.4A的偏差
附学习参考网址
- STM32G4 FOC开发实战