弧节点

- tailvex数据域:存储弧尾一端顶点在顺序表中的位置下标;
- headvex 数据域:存储弧头一端顶点在顺序表中的位置下标;
- hlink 指针域:指向下一个以当前顶点作为弧头的弧;
- tlink 指针域:指向下一个以当前顶点作为弧尾的弧;
- info 指针:存储弧的其它信息,例如有向网中弧的权值。如果不需要存储其它信息,可以省略。
顶点节点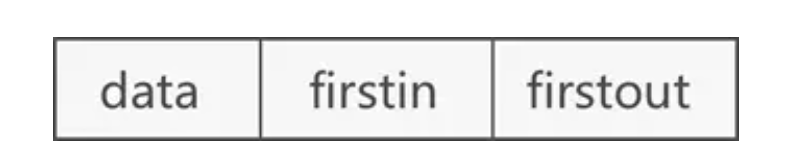
- data 数据域:用来存储顶点的信息;
- firstin 指针域:指向一个链表,链表中记录的都是以当前顶点为弧头的弧的信息;
- firstout 指针域:指向另一个链表,链表中记录的是以当前顶点为弧尾的弧的信息。
就类似这种结构图: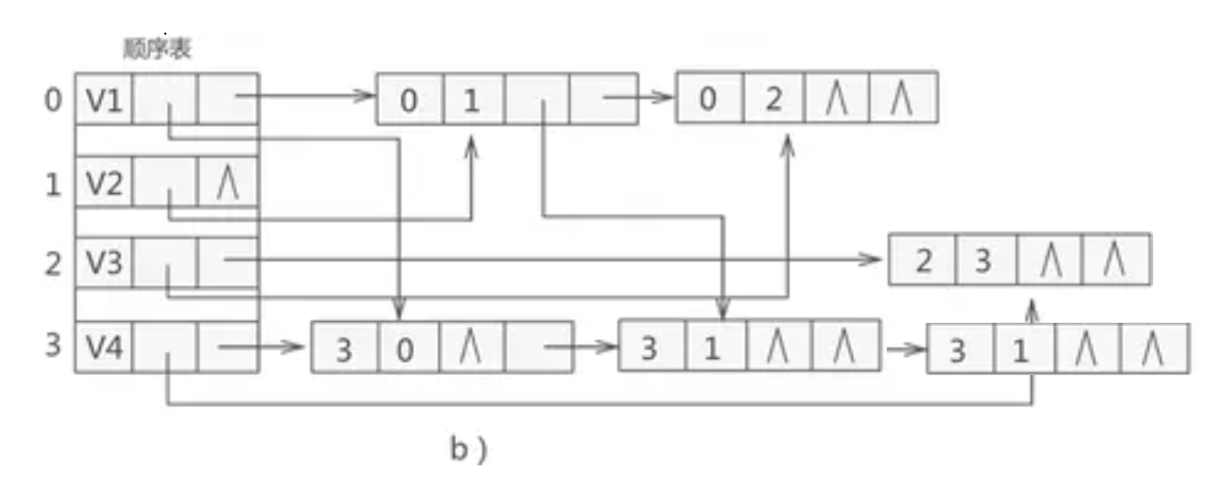
大家别看他有这么多变量,其实理解起来很简单,十字链表是有向图的一种存储方式。
顶点节点中的firstout管理的是所有的弧尾,而弧节点的tlink负责链接。
顶点节点中的firstin管理的是所有的弧头 ,而弧节点的hlink负责链接。
在编写代码中,我给弧节点增加了两个指针分别是hprelink与tprelink。
这两个指针的意义是:
hprelink: 指向上一个以当前顶点作为弧头的弧;
tprelink:指向上一个以当前顶点作为弧尾的弧;
其实就是双链表的思想,为什么想用双链表,其实我在实现删除的时候:当我以头结点进行firstout遍历后找到当前顶点为弧尾的弧后,发现还要遍历一遍firstin找到当前顶点为弧头的弧。所以就寻思用双链表吧。其实如果不用双链表也大差不差只不过要多遍历一次,都是要找到这个节点的前一个节点和后一个节点,进行节点维护。
我觉得写代码中有一些心得值得分享的:在删除节点的时候吧,我总是把弧头与弧尾放到一块分析,比如:弧头前一个节点如果为空弧尾前一个节点如果不为空,弧头后一个节点如果为空弧尾后一个节点如果为空.......分析了一大坨。漏洞百出,逻辑没有闭合(痛苦了很长时间)。后来,我就逐个分析把他们分开了,删除这个节点的本质其实就是维护这个节点的前弧头一个节点,和后弧头一个节点,如果前为空....如果后为空....。之后分析弧尾也是这个套路。后来我总结一下:维护一个位置,其实就是分析前一个位置与后一个位置,不用管这个节点位置本身在头还是尾还是中间。
#pragma once
#include <string>
#include <vector>
#include <iostream>
#include <map>
using namespace std;
namespace Cross_linked_list
{
template<class W>
struct ArcNode
{
int tailvex; // 弧尾下标
int headvex; // 弧头下标
ArcNode<W>* hlink; // 相同弧头的下一条弧
ArcNode<W>* tlink; // 相同弧尾的下一条弧
ArcNode<W>* hprelink; // 弧头的上一条弧
ArcNode<W>* tprelink; // 弧尾的上一个弧
W weight; // 权值
ArcNode(int tail, int head, W w)
:tailvex(tail)
, headvex(head)
, hlink(nullptr)
, tlink(nullptr)
, hprelink(nullptr)
, tprelink(nullptr)
, weight(w)
{}
};
// 顶点结构节点
template<class V, class W>
struct VexNode
{
V data; // 顶点信息
ArcNode<W>* firstin; // 指向该顶点的第一条入弧
ArcNode<W>* firstout;// 指向该顶点的第一条出弧
VexNode(V val)
:data(val)
, firstin(nullptr)
, firstout(nullptr)
{}
};
template<class V, class W>
class Graph
{
typedef ArcNode<W> Arc;
typedef VexNode<V, W> Vex;
public:
// 4 , "ABCD"
Graph(int n, const V* ver)
{
// 存储顶点并与下标建立映射
_vertexs.reserve(n);
_vexstable.resize(n, nullptr); // 初始化为nullptr
for (int i = 0; i < n; i++)
{
_vertexs.push_back(ver[i]);
_indexMap[ver[i]] = i;
// 创建VexNode对象
_vexstable[i] = new Vex(ver[i]);
}
}
~Graph()
{
// 释放所有顶点和弧节点
for (auto vex : _vexstable)
{
// 释放出弧节点
Arc* p = vex->firstout;
while (p)
{
Arc* temp = p;
p = p->tlink;
delete temp;
}
// 释放顶点
delete vex;
}
}
void addArc(V src, V dst, W weight)
{
int srci = locateVex(src);
int dsti = locateVex(dst);
if (srci == -1 || dsti == -1)
{
cout << "顶点不存在!" << endl;
return;
}
Arc* arc = new Arc(srci, dsti, weight);
// 获取源顶点和目标顶点的指针
Vex* srcVex = _vexstable[srci];
Vex* dstVex = _vexstable[dsti];
// 维护出弧链表(双向)
if (srcVex->firstout) {
srcVex->firstout->tprelink = arc;
}
arc->tlink = srcVex->firstout;
srcVex->firstout = arc;
arc->tprelink = nullptr;
// 维护入弧链表(双向)
if (dstVex->firstin) {
dstVex->firstin->hprelink = arc;
}
arc->hlink = dstVex->firstin;
dstVex->firstin = arc;
arc->hprelink = nullptr;
}
void delEdge(V src, V dst)
{
int srci = locateVex(src);
int dsti = locateVex(dst);
if (srci == -1 || dsti == -1)
{
cout << "顶点不存在!" << endl;
return;
}
// 查找从srci到dsti的节点
Arc* arc = _vexstable[srci]->firstout;
Arc* prev = nullptr;
while (arc && arc->headvex != dsti)
{
prev = arc;
arc = arc->tlink;
}
if (!arc)
{
cout << "边不存在!" << endl;
return;
}
// 获取源顶点和目标顶点的指针
Vex* srcVex = _vexstable[srci];
Vex* dstVex = _vexstable[dsti];
// 从出弧链表中删除
// 如果前节点存在,不存在就更新头节点
if (prev)
prev->tlink = arc->tlink;
else
srcVex->firstout = arc->tlink;
// 如果后节点存在
if (arc->tlink)
arc->tlink->tprelink = prev;
// 从入弧链表中删除
if (arc->hprelink)
arc->hprelink->hlink = arc->hlink;
else
dstVex->firstin = arc->hlink;
// 如果后节点存在
if (arc->hlink)
arc->hlink->hprelink = arc->hprelink;
delete arc;
}
void print()
{
cout << "映射关系" << endl;
for (size_t i = 0; i < _vexstable.size(); ++i)
{
cout << _vexstable[i]->data << ":" << i << endl;
}
cout << endl;
cout << "出弧链表:" << endl;
for (size_t i = 0; i < _vexstable.size(); ++i)
{
Arc* p = _vexstable[i]->firstout;
cout << "顶点 " << _vexstable[i]->data << "(" << i << ") 的出弧:";
while (p)
{
cout << "[" << _vertexs[p->headvex] << ", 权值:" << p->weight << "] ";
p = p->tlink;
}
cout << endl;
}
cout << endl;
cout << "入弧链表:" << endl;
for (size_t i = 0; i < _vexstable.size(); ++i)
{
Arc* p = _vexstable[i]->firstin;
cout << "顶点 " << _vexstable[i]->data << "(" << i << ") 的入弧:";
while (p)
{
cout << "[" << _vertexs[p->tailvex] << "->" << _vexstable[i]->data << ", 权值:" << p->weight << "] ";
p = p->hlink;
}
cout << endl;
}
}
private:
// 查找顶点在顶点表中的下标
int locateVex(V v)
{
auto it = _indexMap.find(v);
if (it != _indexMap.end())
{
return it->second;
}
else
{
return -1;
}
}
private:
vector<Vex*> _vexstable; // 顶点表
map<V, int> _indexMap; // 映射关系
vector<V> _vertexs; // 顶点集合
};
void test()
{
Graph<char, int> g(4, "ABCD");
g.addArc('A', 'B', 1);
g.addArc('A', 'C', 1);
g.addArc('C', 'D', 1);
g.addArc('C', 'A', 1);
g.addArc('D', 'A', 1);
g.addArc('D', 'C', 1);
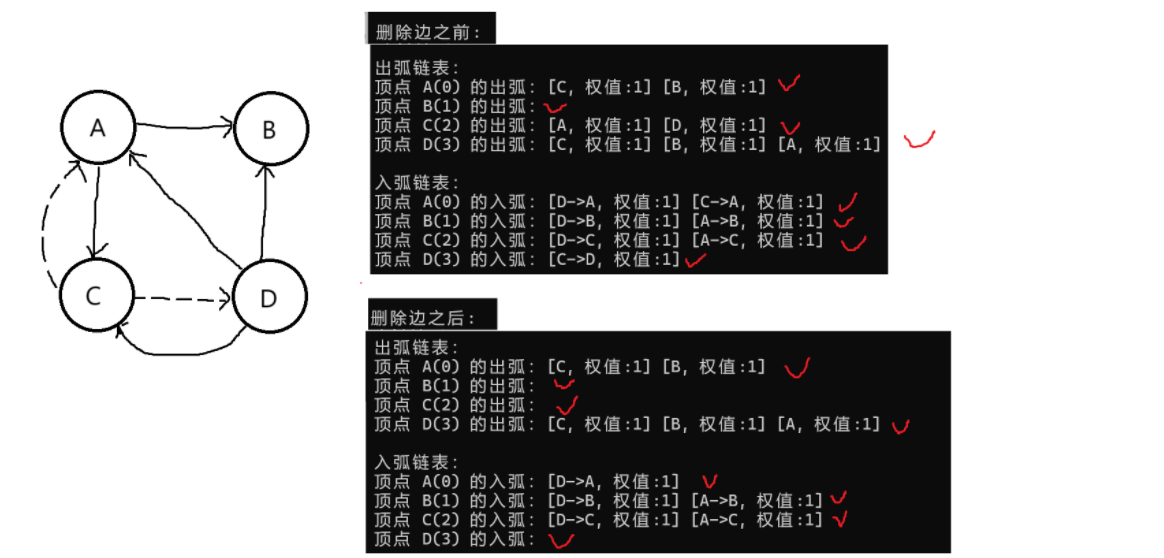
cout << "\n删除边之前:\n";
g.print();
g.delEdge('C', 'A');
g.delEdge('C', 'D');
cout << "\n删除边之后:\n";
g.print();
}
}效果展示: