标题:[项目深挖]仿muduo库的并发服务器的优化方案
@水墨不写bug

文章目录
- 一、buffer 模块
- (1)线性缓冲区+直接扩容---->环形缓冲区+定时扩容(只会扩容一次)
- (2)使用双缓冲(Double Buffering)
- (3)数据丢弃策略
- 为什么视频传输选择不可靠的UDP协议?
- (4)零拷贝
- 为什么零拷贝重要?
- 零拷贝的典型场景
- 传统数据传输的过程
- 零拷贝的过程
- 实现零拷贝的技术
- 1. `sendfile` 系统调用
- 2. `mmap` + `write`
- 3. `splice` 系统调用
- 二、EventLoop 模块
- 如何理解RunInLoop这一类的函数?
- 为什么需要 runInLoop?
- runInLoop 的优点
- (1)减少锁的使用----无锁队列
- (2)优化定时器处理----时间轮代替最小堆
- 为什么 TimerWheel 需要 weak_ptr?
- 三. ThreadPool 模块
- 四、Acceptor 模块
- 2. 关键组件
- 3. 实现步骤
- 3.1. 定义负载均衡器
- 3.2. 改造 `Acceptor` 模块
- 3.3. 改造 `EventLoop` 模块
- 五、定时器模块
- 六、日志模块
- 七、 错误处理与监控
- 1. 设计原则
- 2. 实现步骤
- 2.1. 定义异常基类
- 2.2. 定义派生异常类
- 2.3. 在核心模块中抛出异常
- 2.4. 全局捕获异常
- 3. 优化与扩展
- 细化异常信息
- 结合日志记录
- 异常恢复机制
- 支持自定义异常类型
一、buffer 模块
(1)线性缓冲区+直接扩容---->环形缓冲区+定时扩容(只会扩容一次)
如果缓冲区满了超过一定时间(10s)仍然处于高使用率(>=90%)的状态,则扩容一次,增大环形缓冲区的大小,后续不再扩容。扩容一次之后,关闭定时器。
基于历史数据自适应扩容:历史上缓冲区如果负载较高,可以选择较大扩容幅度;如果负载较低,可以选择较小扩容幅度。通过prev使用率与cur使用率求变化率。
如果扩容后的缓冲区仍然一直处于高使用率状态,则计入日志文件。
合理性:
缓冲区负载偶发性:当缓冲区满的情况是偶发的,而不是长期的瓶颈。
内存资源敏感性:扩容是有限制的(只扩容一次),避免了动态扩容带来的过多内存消耗。
(2)使用双缓冲(Double Buffering)
使用两个缓冲区,当一个缓冲区满时切换到另一个缓冲区,避免阻塞。通过状态变量控制两个缓冲区的切换。
(3)数据丢弃策略
当缓冲区满时,直接丢弃新到达的数据或旧数据。
丢弃最旧数据:移除环形缓冲区中最早的数据(比如日志系统中)。
丢弃新数据:直接丢弃当前要写入的内容(比如视频帧流中)。
优点:
避免系统阻塞,保证系统运行流畅。
缺点:
数据丢失可能会影响系统的业务逻辑。
适用场景:
应用对数据完整性要求不高,如日志、视频流等场景。
为什么视频传输选择不可靠的UDP协议?
UDP------无连接,不可靠,低延迟,面向数据报。
实时性
使用 TCP 时,丢包会触发重传机制,可能导致延迟增加或卡顿,不适合实时性要求高的场景。
UDP 没有重传机制,即使丢包,视频播放也不会被阻塞,用户可能只会看到短暂的画质下降。
容忍丢包
视频流通常使用编码技术(如 H.264、H.265),具有一定的抗丢包能力。
即使部分数据丢失,解码器仍然可以通过冗余信息或插值技术恢复画面,保证用户体验。
高效性
UDP 的开销比 TCP 更小,因为它没有复杂的连接管理、流量控制和拥塞控制。
对于带宽有限的网络环境,减少协议开销意味着可以传输更多的视频数据。
乱序容忍
视频播放有一定的缓冲区,可以通过序列号等方式重新排序数据包,解决 UDP 的乱序问题。
即使部分数据包延迟到达,也可以选择丢弃,而不会影响整体流畅度。
视频传输选择 UDP 的原因主要是为了满足实时性、高效性和丢包容忍的需求。尽管 UDP 本身是不可靠的,但结合应用层协议(如 RTP)、纠错技术(如 FEC)和优化手段(如自适应比特率),可以弥补其不足,确保视频流的质量和流畅性。对于实时性要求低的场景(如视频文件下载),则可以选择更可靠的 TCP。
(4)零拷贝
零拷贝(Zero-Copy) 是一种优化技术,旨在在计算机系统中减少数据复制的次数,以提高数据传输或处理的效率,尤其是在文件或网络数据的高效传输中。零拷贝的核心理念是避免 CPU 将数据从一个位置复制到另一个位置,而是通过特定的硬件或内核支持,直接在数据的生产者和消费者之间传递数据。
为什么零拷贝重要?
- 减少 CPU 占用:
- 数据拷贝通常需要 CPU 介入,零拷贝通过减少拷贝次数,释放了 CPU 的计算资源。
- 提高数据传输效率:
- 数据直接从一个位置移动到目标位置,不经过中间缓冲,大幅减少传输延迟。
- 降低内存带宽压力:
- 传统的多次数据拷贝会占用宝贵的内存带宽,零拷贝减少了这一开销。
零拷贝的典型场景
- 文件传输(文件到网络):
- 将文件内容直接发送到网络(如通过
sendfile系统调用)。
- 将文件内容直接发送到网络(如通过
- 网络数据传输:
- 数据直接从内核缓冲区发送到网卡,不经过用户态。
- 磁盘 I/O 优化:
- 在大文件读写中,避免数据在磁盘、内核缓冲区、用户态缓冲区之间反复拷贝。
传统数据传输的过程
以文件发送到网络为例,传统数据传输的步骤如下:
- 文件读取:
- 从磁盘读取文件内容到内核缓冲区。
- 复制到用户空间:
- 将内核缓冲区的数据复制到用户空间的缓冲区。
- 发送到内核:
- 用户空间的数据再复制回内核空间的网络缓冲区。
- 发送到网卡:
- 最后,网卡从内核网络缓冲区中读取数据并发送。
总共涉及 4 次数据拷贝,其中 CPU 负责完成至少 2 次数据复制。
零拷贝的过程
通过零拷贝技术,可以将上述过程优化为:
- 数据直接映射:
- 使用内核支持,直接将文件从磁盘的页缓存发送到网络缓冲区(不经过用户态)。
- 网卡直接读取:
- 网卡直接从内核缓冲区读取数据并发送,不需要额外的拷贝。
总共涉及 0 次用户态拷贝,CPU 只负责控制流程。
实现零拷贝的技术
以下是几种常见的零拷贝实现技术:
1. sendfile 系统调用
- 描述:
sendfile是 Linux 提供的一种系统调用,用于将文件直接从内核页缓存发送到网络套接字。
- 工作原理:
- 文件数据从磁盘被读取到内核页缓存后,直接从内核页缓存发送到网卡,无需经过用户态。
- 适用场景:
- 文件服务器、Web 服务器等需要高效传输文件的场景。
- 示例代码:
int fd = open("file.txt", O_RDONLY); int sock = socket(...); sendfile(sock, fd, NULL, file_size);
2. mmap + write
- 描述:
- 使用
mmap将文件映射到用户空间内存地址,然后直接调用write将数据发送到套接字。
- 使用
- 工作原理:
- 避免了从磁盘读取到用户缓冲区的额外拷贝。
- 适用场景:
- 需要灵活访问文件内容,同时减少拷贝次数的场景。
- 示例代码:
int fd = open("file.txt", O_RDONLY); char* data = mmap(NULL, file_size, PROT_READ, MAP_PRIVATE, fd, 0); write(sock, data, file_size);
3. splice 系统调用
- 描述:
splice允许在两个文件描述符之间直接移动数据,减少拷贝。
- 工作原理:
- 数据通过内核缓冲区直接从一个管道移动到另一个目标,无需用户态干预。
- 适用场景:
- 网络数据流处理、文件复制等场景。
- 示例代码:
int pipefd[2]; pipe(pipefd); splice(file_fd, NULL, pipefd[1], NULL, file_size, SPLICE_F_MOVE); splice(pipefd[0], NULL, sock_fd, NULL, file_size, SPLICE_F_MOVE);
二、EventLoop 模块
EventLoop 是 Muduo 的核心模块之一,负责管理事件循环和分发。
如何理解RunInLoop这一类的函数?
在 Muduo 网络库中,runInLoop 这一类函数是为了在特定的线程(即事件循环线程)中执行某些任务而设计的。它们的主要用途是解决跨线程调用的问题,确保任务在正确的线程上下文中执行。
runInLoop 的主要作用是将一个任务(通常是回调函数)添加到当前的 EventLoop 中执行。如果调用 runInLoop 的线程不是事件循环的线程,那么任务会被放入事件循环的任务队列中,等待事件循环线程来执行。
为什么需要 runInLoop?
在多线程环境中,Muduo 的 EventLoop 是线程不安全的,即:不能直接从多个线程访问或修改同一个 EventLoop。
事件循环线程需要对事件进行处理,而其他线程可能需要向事件循环线程发起某些操作(例如注册回调函数、修改定时器等)。
问题: 如果直接在非事件循环线程中调用事件循环的操作,可能会导致数据竞争或崩溃。
解决: 使用 runInLoop 将任务安全地转移到事件循环线程中,确保任务在正确的线程上下文中被执行。 runInLoop 的实现原理
以下是 runInLoop 的主要工作机制:
1、判断线程上下文:
如果调用 runInLoop 的线程是当前 EventLoop 所属的线程,则直接执行任务。
如果调用线程不是事件循环线程,则将任务添加到任务队列中,等待事件循环线程来执行。
2、任务队列:
EventLoop 内部有一个任务队列(通常是 std::vector<std::function<void()>>),用于存储需要在事件循环线程中执行的任务。
3、唤醒机制:
如果任务是从其他线程添加的,EventLoop 需要被唤醒(通常通过向 wakeupFd 写入数据),以便尽快处理新增的任务。
runInLoop 的优点
线程安全:
确保所有任务都在事件循环线程中执行,避免数据竞争。
高效唤醒:
使用轻量级唤醒机制(如 eventfd 或 pipe)快速响应任务。
任务聚合:
通过任务队列,可以批量处理任务,减少上下文切换。
(1)减少锁的使用----无锁队列
问题:EventLoop 的跨线程操作(如 runInLoop 和 queueInLoop)使用了锁保护。
优化:
使用无锁队列(如基于 lock-free 的 CAS 算法)替代当前的 std::mutex。
在单线程场景下,完全移除锁。
无锁队列(Lock-Free Queue)是一种数据结构,在多线程环境中使用时,不需要依赖传统的互斥锁来同步线程间的访问,而是通过硬件支持的原子操作(如 CAS,Compare-And-Swap)来完成线程安全的操作。无锁队列通常具有更高的性能,因为它避免了锁的开销和可能的线程阻塞。
实现思路
使用 CAS 操作:
CAS(ptr, old, new):如果 *ptr == old,则将 *ptr 更新为 new,否则不更新,并返回是否成功。
记录队列头和尾:
使用原子变量指向队列的头部和尾部。
生产者操作(Enqueue):
找到当前尾节点并尝试将新节点插入到尾部。
消费者操作(Dequeue):
找到当前头节点并尝试移除它。
(2)优化定时器处理----时间轮代替最小堆
问题:EventLoop 的定时器使用了最小堆存储,复杂度为 O(log N),当定时任务量非常多时可能会产生性能瓶颈。
优化:
使用分层时间轮(TimerWheel)替代最小堆,降低复杂度到 O(1),尤其适合高频定时任务场景。
使用智能指针管理定时任务
在 TimerWheel 中使用 shared_ptr 和 weak_ptr 来管理定时任务是一种常见的设计,主要目的是解决 内存管理 和 资源生命周期控制 的问题。
shared_ptr 和 weak_ptr 的基本概念
shared_ptr:
一个智能指针,提供共享所有权。
当最后一个 shared_ptr 被销毁时,所管理的对象会自动释放。
使用 use_count() 方法可以查看当前有多少个 shared_ptr 在共享同一对象。
weak_ptr:
一个不影响引用计数的智能指针。
只能通过 lock() 方法访问所管理的对象。
当所指向的对象被销毁时,weak_ptr 会变为无效(即 expired() 返回 true)。
为什么 TimerWheel 需要 weak_ptr?
在 TimerWheel 中,一个定时任务可能需要被多个地方引用,例如:
TimerWheel 的槽位:每个槽位可能存储一组任务(通常是 shared_ptr < TimerTask > )。
用户代码:用户可能直接持有某个定时任务的引用,以便随时取消或修改任务。
如果只使用 shared_ptr,会导致循环引用的问题。例如:
定时任务本身持有引用,而 TimerWheel 的槽位又持有定时任务的 shared_ptr。
这种情况下,shared_ptr 的引用计数永远不会降为 0,导致内存泄漏。
为了解决这种问题,使用 weak_ptr 来打破循环引用:
TimerWheel 的槽位使用 weak_ptr 存储定时任务。
用户持有的 shared_ptr 决定了任务的生命周期。
weak_ptr 的作用
1.避免循环引用:
如果定时任务被 shared_ptr 引用,但槽位只保留了 weak_ptr,当用户的 shared_ptr 被销毁时,任务会自动释放,避免了内存泄漏。
2.弱引用机制:
TimerWheel 的槽位只需要一个弱引用来跟踪定时任务,而不需要管理其生命周期。
在执行定时任务时,可以通过 weak_ptr::lock() 检查任务是否仍然有效。如果任务已被用户取消或销毁,则无需执行。
3.任务销毁的灵活性:
用户可以随时销毁 shared_ptr,从而取消任务。
同时,TimerWheel 的槽位不会影响任务的生命周期。
三. ThreadPool 模块
ThreadPool 模块用于管理线程池,处理多线程任务。
- 任务窃取(Work Stealing)
- 问题:当前
ThreadPool使用一个任务队列,可能导致某些线程处于繁忙状态,而其他线程空闲。 - 优化:
- 实现任务窃取机制,每个线程都有独立的任务队列,当线程空闲时可以从其他线程的队列中窃取任务。
- 提高任务分配的公平性和整体吞吐量。
- 问题:当前
四、Acceptor 模块
Acceptor 模块负责监听新连接并分发给 TcpConnection。
- 多线程负载均衡
- 问题:
Acceptor默认将新连接分配给单个线程,可能导致线程负载不均。 - 优化:
- 实现动态负载均衡算法(如基于线程负载或连接数),合理分配新连接。
- 为了在 Muduo 网络库的 Acceptor 模块中实现动态负载均衡算法(如基于线程负载或连接数的分配),需要在接受新连接时,动态地将连接分配给负载最轻的线程或事件循环(
EventLoop)。
- 问题:
以下是实现动态负载均衡的设计方案和步骤:
- 动态分配:
- 当
Acceptor接收到一个新的连接时,根据每个线程或EventLoop的当前负载(如连接数或任务队列长度),将连接分配给负载最轻的线程。
- 当
- 动态监控:
- 持续跟踪每个线程的负载情况,确保负载均衡。
- 高效分发:
- 分配逻辑应尽量轻量化,避免增加额外的系统开销。
2. 关键组件
-
线程池或
EventLoopThreadPool:- 管理多个
EventLoop线程,每个线程处理一定数量的连接。 - 提供接口获取每个线程的负载信息。
- 管理多个
-
负载监控机制:
- 跟踪每个线程或
EventLoop的当前负载(如连接数、任务队列长度)。 - 负载信息可以通过计数器或定时统计更新。
- 跟踪每个线程或
-
负载均衡算法:
- 基于负载信息动态选择最优的线程。
- 典型算法包括:
- 最少连接数优先:将新连接分配给连接数最少的线程。
- 任务队列长度优先:将新连接分配给任务队列最短的线程。
- 加权随机分配:根据线程的负载权重随机分配。
-
Acceptor 模块的改造:
- 在接受新连接时调用负载均衡器,分配连接到合适的线程。
3. 实现步骤
3.1. 定义负载均衡器
创建一个负载均衡器类,负责跟踪线程的负载信息并选择合适的线程。
#include <vector>
#include <memory>
#include <mutex>
#include <functional>
class EventLoop; // 前向声明
class LoadBalancer {
public:
LoadBalancer() = default;
// 添加一个线程的负载监控
void addEventLoop(EventLoop* loop) {
std::lock_guard<std::mutex> lock(mutex_);
eventLoops_.emplace_back(loop, 0); // 初始负载为 0
}
// 更新线程的负载(比如连接数变化)
void updateLoad(EventLoop* loop, int delta) {
std::lock_guard<std::mutex> lock(mutex_);
for (auto& [eventLoop, load] : eventLoops_) {
if (eventLoop == loop) {
load += delta;
break;
}
}
}
// 获取负载最轻的线程
EventLoop* getLeastLoadedEventLoop() {
std::lock_guard<std::mutex> lock(mutex_);
EventLoop* bestLoop = nullptr;
int minLoad = INT_MAX;
for (const auto& [eventLoop, load] : eventLoops_) {
if (load < minLoad) {
bestLoop = eventLoop;
minLoad = load;
}
}
return bestLoop;
}
private:
std::vector<std::pair<EventLoop*, int>> eventLoops_; // 每个线程及其负载
std::mutex mutex_; // 保护线程安全
};
3.2. 改造 Acceptor 模块
修改 Acceptor,在接收到新连接时调用负载均衡器,选择最优线程。
#include "LoadBalancer.h"
#include "EventLoop.h"
#include <functional>
#include <sys/socket.h>
#include <netinet/in.h>
#include <unistd.h>
#include <iostream>
class Acceptor {
public:
Acceptor(EventLoop* baseLoop, int port, LoadBalancer& loadBalancer)
: baseLoop_(baseLoop), loadBalancer_(loadBalancer) {
// 创建监听套接字
listenFd_ = ::socket(AF_INET, SOCK_STREAM | SOCK_NONBLOCK, 0);
// 绑定地址和端口
sockaddr_in addr{};
addr.sin_family = AF_INET;
addr.sin_addr.s_addr = INADDR_ANY;
addr.sin_port = htons(port);
::bind(listenFd_, (sockaddr*)&addr, sizeof(addr));
// 开始监听
::listen(listenFd_, SOMAXCONN);
}
~Acceptor() {
::close(listenFd_);
}
// 开始接受连接
void acceptConnections() {
while (true) {
sockaddr_in clientAddr{};
socklen_t clientLen = sizeof(clientAddr);
int connFd = ::accept4(listenFd_, (sockaddr*)&clientAddr, &clientLen, SOCK_NONBLOCK);
if (connFd < 0) {
if (errno == EAGAIN || errno == EWOULDBLOCK) {
break; // 无更多连接
} else {
std::cerr << "Accept error: " << strerror(errno) << std::endl;
break;
}
}
// 使用负载均衡器选择最优线程
EventLoop* targetLoop = loadBalancer_.getLeastLoadedEventLoop();
if (targetLoop) {
// 将新连接分配给目标线程
targetLoop->runInLoop([connFd, targetLoop]() {
targetLoop->addConnection(connFd);
});
// 更新负载信息
loadBalancer_.updateLoad(targetLoop, 1);
} else {
std::cerr << "No available EventLoop to handle connection" << std::endl;
::close(connFd);
}
}
}
private:
EventLoop* baseLoop_; // 主线程的事件循环
int listenFd_; // 监听套接字
LoadBalancer& loadBalancer_; // 负载均衡器
};
3.3. 改造 EventLoop 模块
扩展 EventLoop,支持添加和处理新连接。
#include <functional>
#include <vector>
#include <mutex>
#include <unistd.h>
#include <iostream>
class EventLoop {
public:
EventLoop() = default;
void runInLoop(const std::function<void()>& task) {
// 简化的事件循环任务执行
std::lock_guard<std::mutex> lock(mutex_);
tasks_.emplace_back(task);
}
void addConnection(int connFd) {
std::cout << "Handling new connection on EventLoop: " << this << std::endl;
connections_.emplace_back(connFd);
}
void processTasks() {
std::vector<std::function<void()>> tasksCopy;
{
std::lock_guard<std::mutex> lock(mutex_);
tasksCopy.swap(tasks_);
}
for (const auto& task : tasksCopy) {
task();
}
}
private:
std::vector<std::function<void()>> tasks_; // 待处理任务
std::mutex mutex_; // 保护任务队列
std::vector<int> connections_; // 当前连接列表
};
- 连接限流
- 问题:在高并发场景下,可能会同时接收大量连接,导致系统资源耗尽。
- 优化:
- 设置连接速率限制(如每秒最多接收 100 个连接)。
- 在超过连接限制时,拒绝新连接。
五、定时器模块
TimerQueue 模块用于管理定时任务。
- 分层时间轮
问题:当前使用最小堆存储定时任务,当定时器数量较多时,插入和删除的复杂度较高。
优化:使用分层时间轮(TimerWheel)结构,降低复杂度到 O(1)。
分层时间轮的设计灵感来源于时钟的分层结构。例如:
时钟有秒针、分针、时针,每一层负责处理不同的时间粒度。
当秒针完成一圈(60 秒),会推动分针向前迈进一格。
类似的,分层时间轮将时间划分为多个层级,每一层是一个环形队列,队列中的每个槽(slot)存储对应时间间隔的定时任务。当时间轮的某一层转动一圈后,触发下一层的转动。
亮点:使用智能指针管理任务TimerTask
分层时间轮的结构
1、时间轮层级:
每一层是一个环形数组(类似时钟的轮盘)。
每个槽代表一个固定的时间间隔(时间粒度)。
第一层的时间粒度最小,越高层的时间粒度越大。
2、每个槽的内容:
每个槽存储定时任务的列表。
每个任务需要携带额外的元数据(例如任务到期时间)。
3、层级的关系:
第一层负责管理最小时间粒度的任务。
如果某个任务的时间超过当前层的最大时间范围,则被推进到下一级时间轮。
分层时间轮的工作原理
插入任务
根据任务的到期时间,计算任务所在的时间轮层级和槽位:
槽位索引 = ( 到期时间 , / , 时间粒度 ) ,
如果任务的到期时间超过当前时间轮层级的时间范围,则将任务递归推入到更高层的时间轮。
定时器轮转
时间轮以固定的时间间隔轮转一格(类似秒针转动)。
每次轮转到一个槽位时,触发该槽中的任务。
如果某个任务的到期时间未到,则将其重新分配到更高层时间轮的对应槽位。
任务触发
当轮盘转动到任务所在的槽位,并且任务的到期时间与当前时间匹配时,触发任务。
分层时间轮的优势
高性能:
插入、删除、触发的时间复杂度接近 (O(1))。
适用于大规模定时任务的场景(例如实时系统的事件调度)。
灵活性:
支持多层时间轮,适应不同的时间范围和粒度需求。
内存效率:
由于采用环形数组存储任务,内存占用较小。
分层时间轮的应用场景
网络服务器:
TCP 连接的超时管理。
应用于高性能网络库(如 Netty、Muduo 等)。
实时系统:
事件驱动的调度系统。
需要高效管理大量定时任务的场景。
分布式系统:
分布式任务调度(如分布式锁的过期时间管理)。
游戏引擎:
游戏中的倒计时、技能冷却等事件。
分层时间轮的局限性
时间粒度限制:
时间轮的粒度决定了定时器的精度,任务触发可能会有一定的延迟。
任务分层复杂性:
跨层任务需要递归推进,可能增加一定的实现复杂性。
非实时性:
高层时间轮的任务可能需要等待低层时间轮转动完成,导致延迟。
- 批量定时器
问题:大量定时任务可能触发频繁的上下文切换。
优化:
合并多个定时器事件,使用批量处理逻辑减少系统调用。
六、日志模块
Logging 模块是 Muduo 的日志系统。
-
异步日志优化
- 问题:当前异步日志可能会阻塞高优先级任务的处理。
- 优化:
- 使用双缓冲区实现异步日志,减少阻塞。
- 提供日志压缩功能,减少磁盘 I/O 开销。
-
日志分级
- 问题:日志系统不支持动态调整日志级别。
- 优化:
- 支持按模块或线程动态调整日志级别,提高调试效率。
七、 错误处理与监控
Muduo 缺乏对错误和性能的全面监控。
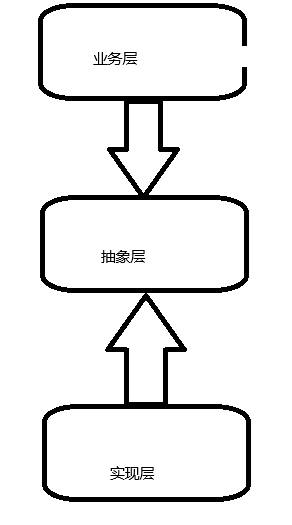
层级式异常管理
在 Muduo 库的基础上设计一个异常机制,可以通过引入基于 C++ 多态 的异常层次结构来分类和处理不同类型的异常。以下是具体的设计思路:
1. 设计原则
- 异常分层:
- 定义一个基类
MuduoException,所有具体异常类型都从该基类派生。 - 使用 C++ 多态(基类引用捕获派生类异常)来实现统一的异常处理逻辑。
- 定义一个基类
- 异常分类:
- 根据 Muduo 的核心模块(如
EventLoop,TcpConnection,TimerQueue等),定义具体的异常类型。例如:EventLoopException:处理事件循环相关的异常。TcpConnectionException:处理 TCP 连接相关的异常。TimerQueueException:处理定时器相关的异常。
- 根据 Muduo 的核心模块(如
- 异常捕获:
- 在全局或模块级别捕获
MuduoException类型的异常,并为不同的派生类提供具体的处理逻辑。
- 在全局或模块级别捕获
- 日志和反馈:
- 捕获异常后,记录日志或提供反馈信息,方便调试和问题追踪。
2. 实现步骤
2.1. 定义异常基类
创建一个通用的异常基类 MuduoException,它继承自 std::exception,并提供基本的异常信息接口。
#include <exception>
#include <string>
class MuduoException : public std::exception {
public:
explicit MuduoException(const std::string& message)
: message_(message) {}
// 返回异常信息
virtual const char* what() const noexcept override {
return message_.c_str();
}
// 提供异常类型的标识
virtual const char* type() const noexcept {
return "MuduoException";
}
protected:
std::string message_;
};
2.2. 定义派生异常类
为 Muduo 的核心模块定义具体的异常类型,这些类从 MuduoException 派生。
#include "MuduoException.h"
// 事件循环相关异常
class EventLoopException : public MuduoException {
public:
explicit EventLoopException(const std::string& message)
: MuduoException(message) {}
virtual const char* type() const noexcept override {
return "EventLoopException";
}
};
// TCP 连接相关异常
class TcpConnectionException : public MuduoException {
public:
explicit TcpConnectionException(const std::string& message)
: MuduoException(message) {}
virtual const char* type() const noexcept override {
return "TcpConnectionException";
}
};
// 定时器相关异常
class TimerQueueException : public MuduoException {
public:
explicit TimerQueueException(const std::string& message)
: MuduoException(message) {}
virtual const char* type() const noexcept override {
return "TimerQueueException";
}
};
2.3. 在核心模块中抛出异常
在 Muduo 的核心模块中,当检测到错误情况时,抛出对应的异常。
示例:在 EventLoop 模块中抛出异常
#include "DerivedExceptions.h"
#include <iostream>
class EventLoop {
public:
void loop() {
try {
// 模拟事件循环错误
throw EventLoopException("Event loop encountered an error!");
} catch (const MuduoException& e) {
handleException(e);
}
}
private:
void handleException(const MuduoException& e) {
// 根据异常类型进行处理
if (std::string(e.type()) == "EventLoopException") {
std::cerr << "[EventLoop Error] " << e.what() << std::endl;
// 执行特定的恢复逻辑
} else {
std::cerr << "[Unknown Error] " << e.what() << std::endl;
}
}
};
2.4. 全局捕获异常
可以在应用的入口函数中统一捕获所有的 MuduoException 类型异常。
#include "EventLoop.cpp"
int main() {
try {
EventLoop loop;
loop.loop();
} catch (const MuduoException& e) {
std::cerr << "Caught a MuduoException: " << e.type() << " - " << e.what() << std::endl;
} catch (const std::exception& e) {
std::cerr << "Caught a std::exception: " << e.what() << std::endl;
} catch (...) {
std::cerr << "Caught an unknown exception" << std::endl;
}
return 0;
}
3. 优化与扩展
细化异常信息
- 为每个异常类型添加更多上下文信息(如错误码、模块名称、操作步骤等)。
- 示例:
explicit TcpConnectionException(const std::string& message, int errorCode) : MuduoException(message), errorCode_(errorCode) {} int errorCode() const { return errorCode_; }
结合日志记录
- 在捕获异常后,将异常信息写入日志,方便后续排查问题。
- 示例:
void logException(const MuduoException& e) { // 写入日志 std::ofstream logFile("error.log", std::ios::app); logFile << "[" << e.type() << "] " << e.what() << std::endl; }
异常恢复机制
- 根据异常类型,尝试执行不同的恢复策略:
- 重启事件循环。
- 关闭并重建 TCP 连接。
- 重新注册定时器。
支持自定义异常类型
- 提供一个工厂函数或宏,方便用户定义新的异常类型。
#define DEFINE_EXCEPTION(name, base) \
class name : public base { \
public: \
explicit name(const std::string& message) \
: base(message) {} \
virtual const char* type() const noexcept { \
return #name; \
} \
};
使用示例:
DEFINE_EXCEPTION(CustomException, MuduoException)
- 基于多态的异常机制:
- 使用基类
MuduoException统一管理异常,派生类提供具体的异常类型。
- 使用基类
- 模块化异常分类:
- 根据 Muduo 的核心模块设计派生异常类,例如
EventLoopException、TcpConnectionException。
- 根据 Muduo 的核心模块设计派生异常类,例如
- 日志和恢复:
- 捕获异常时记录日志,并根据异常类型执行恢复策略。
- 扩展性和灵活性:
- 通过工厂函数或宏支持用户自定义异常类型。
通过这种设计,可以在 Muduo 的基础上实现一个灵活、可扩展的异常机制,既满足了错误检测的需求,又增强了代码的可维护性和健壮性。
性能监控
- 增加性能监控接口,统计每个模块的延迟、吞吐量和错误率。
等待进一步更新与更正~