准备开一个FAST-DDS源码分析系列,源码版本FAST-DDS 1.1.0版本。
FAST-DDS这种网络中间件是非常复杂的,所以前期先去分析每个类的作用是什么,然后在结合RTPS DOC,FAST-DDS DEMO,以及FAST-DDS的doc去串起来逻辑。
Builtin Discovery 模块
xxxProxyData 类负责在 RTPS 网络中「宣布(Announce)」与「发现(Discover)」参与者及其读写端点(DataReader/DataWriter)。它们在本地对象状态与网络 CDR 消息之间建立了双向映射,确保 QoS、Locator、GUID 等关键信息能被高效、可靠地交换。
类:
WriterProxyData
关键成员变量:
class WriterProxyData
GUID_t m_guid; // 发布者全局唯一 ID
LocatorList_t m_unicastLocatorList; // 单播地址列表
LocatorList_t m_multicastLocatorList;// 组播地址列表
InstanceHandle_t m_key; // Writer 实例句柄
WriterQos m_qos; // 完整 QoS 配置
ParameterList_t m_parameterList; // 临时参数列表
RemoteWriterAttributes m_remoteAtt; // 转换后的远端属性
关键函数:
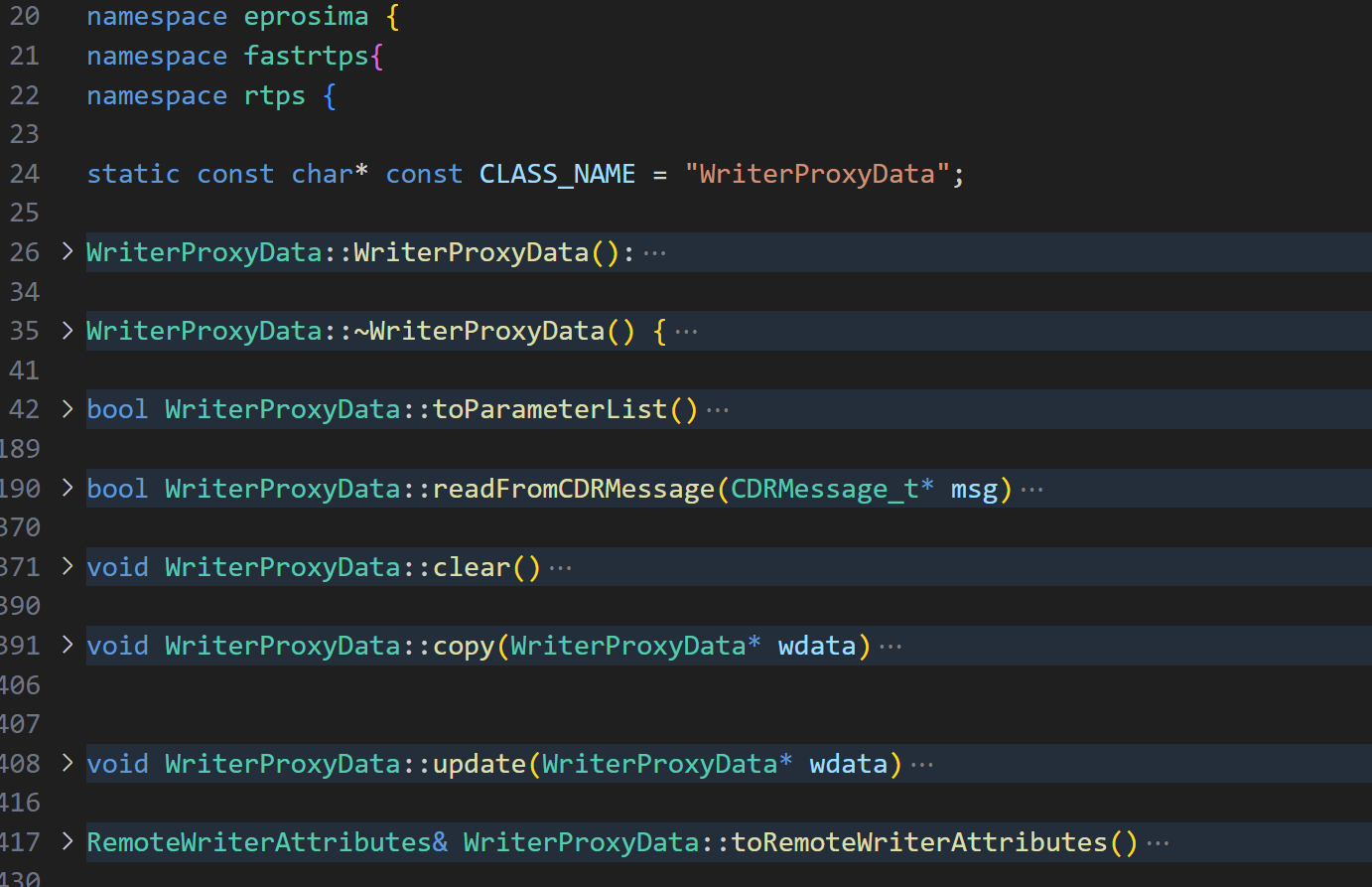
- toParameterList()
清空 m_parameterList,并依次创建 ParameterLocator_t、ParameterGuid_t、ParameterString_t、各类 QoS Policy(只包含 sendAlways 或 hasChanged)等,将它们推入 m_parameterList.m_parameters。 - readFromCDRMessage(CDRMessage_t* msg)
调用 ParameterList::readParameterListfromCDRMsg 填充 m_parameterList,再根据 Pid 将各参数拆回到本地成员(如从 PID_TOPIC_NAME 恢复 m_topicName、从 PID_LIVELINESS 恢复 m_qos.m_liveliness)。 - toRemoteWriterAttributes()
将本地数据(GUID、Locator、QoS)映射到 RemoteWriterAttributes,供 RTPSWriter 在发送数据时参考。
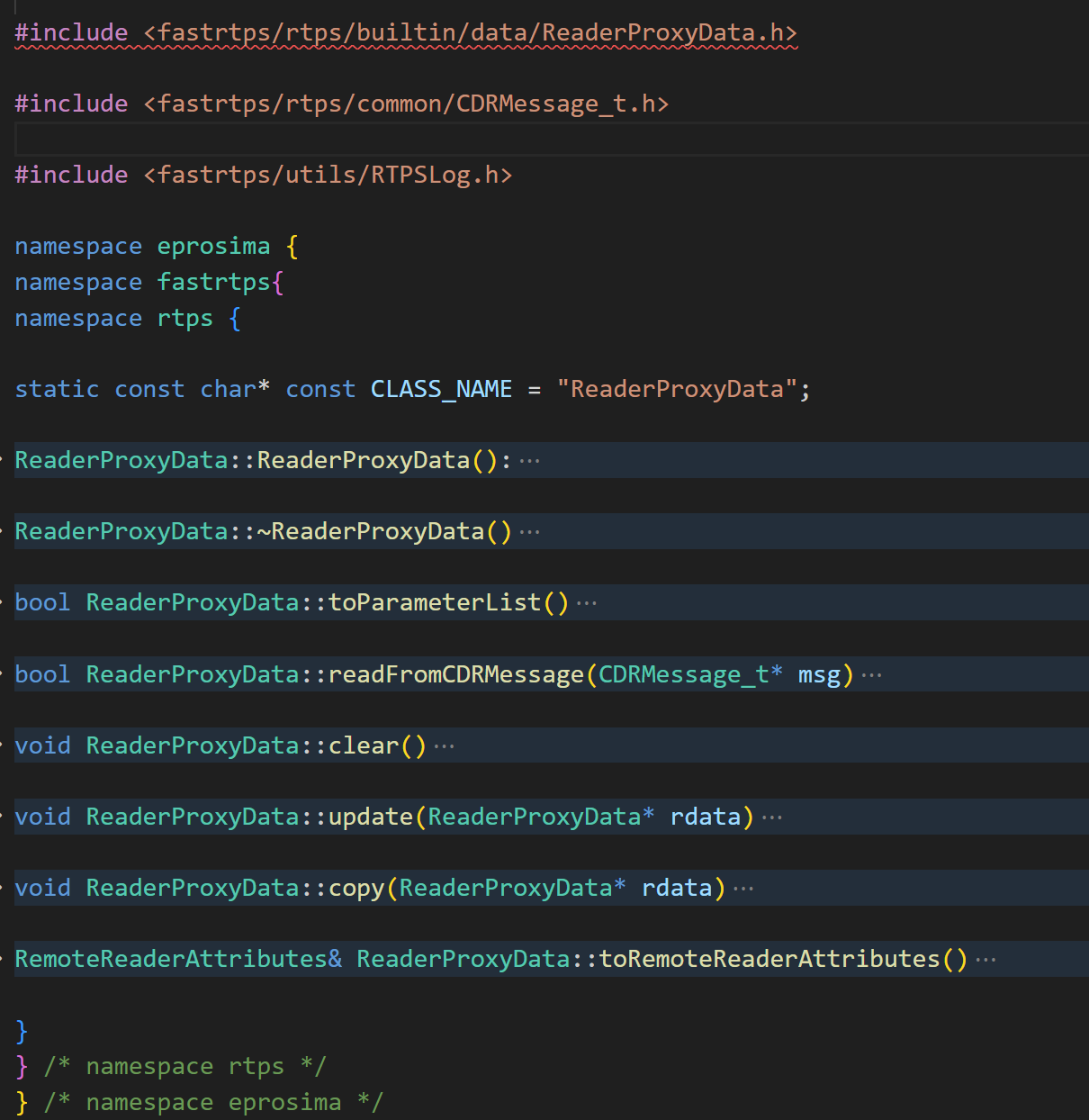
ReaderProxyData
与 WriterProxyData 对称,表示一个远端或本地的 DataReader(订阅者)。在初始化发现、数据交互阶段,要互报 Locator、期望的 Inline QoS、各类订阅策略等。
GUID_t m_guid;
bool m_expectsInlineQos; // 是否在 DATA 消息中期待附带 QoS
LocatorList_t m_unicastLocatorList;
LocatorList_t m_multicastLocatorList;
InstanceHandle_t m_key;
ReaderQos m_qos;
ParameterList_t m_parameterList;
RemoteReaderAttributes m_remoteAtt;
ParticipantProxyData
负责对等 Participant(节点)级别的宣布与发现,包括:
- SPDP(Simple Participant Discovery Protocol)消息的构建与解析。
- 管理 Builtin Endpoint 集(哪些内置读写端点应被广播/监听)。
- 维护租约计时器,监测远端 Participant 存活性。
- 汇总下属所有 ReaderProxyData 与 WriterProxyData 对象。
class ParticipantProxyData {
public:
ParticipantProxyData();
virtual ~ParticipantProxyData();
// —— 协议与标识 ——
ProtocolVersion_t m_protocolVersion; // RTPS 协议版本
VendorId_t m_VendorId; // 厂商 ID
GUID_t m_guid; // 本地/远端 Participant GUID
// —— QoS 与流量控制 ——
bool m_expectsInlineQos; // 是否期望 inline QoS
BuiltinEndpointSet_t m_availableBuiltinEndpoints;// 本节点宣布的内置端点集合
Duration_t m_leaseDuration; // Participant 租约周期
Count_t m_manualLivelinessCount; // 手动存活声明计数
// —— 网络定位 ——
LocatorList_t m_metatrafficUnicastLocatorList; // SPDP 单播列表
LocatorList_t m_metatrafficMulticastLocatorList; // SPDP 组播列表
LocatorList_t m_defaultUnicastLocatorList; // 默认数据单播列表
LocatorList_t m_defaultMulticastLocatorList; // 默认数据组播列表
// —— 标识与属性 ——
InstanceHandle_t m_key; // Participant 实例句柄
std::string m_participantName; // Participant 名称
std::vector<octet> m_userData; // userData QoS
ParameterPropertyList_t m_properties; // 属性列表
// —— 状态与并发 ——
bool isAlive; // 存活标志
bool m_hasChanged; // 数据是否变更(影响 toParameterList)
boost::recursive_mutex* mp_mutex; // 保护 readers/writers 容器
bool ParticipantProxyData::initializeData(RTPSParticipantImpl* part, PDPSimple* pdp)
{
// 1) 从本地 ParticipantImpl 获取租约时长、VendorId、默认 Locator
this->m_leaseDuration = part->getAttributes().builtin.leaseDuration;
set_VendorId_eProsima(this->m_VendorId);
// 2) 根据配置,设置 availableBuiltinEndpoints 掩码
this->m_availableBuiltinEndpoints |= DISC_BUILTIN_ENDPOINT_PARTICIPANT_ANNOUNCER;
...
// 3) 复制 Locator 列表
this->m_defaultUnicastLocatorList = part->getAttributes().defaultUnicastLocatorList;
...
// 4) 保存 Participant 名称与 GUID、InstanceHandle
this->m_participantName = part->getAttributes().getName();
this->m_guid = part->getGuid();
for (i < 16) { copy into m_key }
// 5) 从 PDPSimple(SPDP 组件)拷贝 metatraffic Locator
this->m_metatrafficMulticastLocatorList = pdp->mp_builtin->m_metatrafficMulticastLocatorList;
...
return true;
}
将本地 RTPSParticipantImpl 上的租约时长、GUID、Locator、ParticipantName、UserData 等信息拷贝进来,同时根据配置设置需要 Announce/Detect 的内置端点位掩码,并复制 SPDP 使用的 metatraffic Locator。
bool ParticipantProxyData::toParameterList()
{
if (m_hasChanged)
{
// 清理并重置 QoSList
m_QosList.allQos.resetList();
m_QosList.inlineQos.resetList();
// 依次 addQos:协议版本、VendorID、EXPECTS_INLINE_QOS、GUID
valid &= QosList::addQos(&m_QosList, PID_PROTOCOL_VERSION, this->m_protocolVersion);
valid &= QosList::addQos(&m_QosList, PID_VENDORID, this->m_VendorId);
if (m_expectsInlineQos)
valid &= QosList::addQos(&m_QosList, PID_EXPECTS_INLINE_QOS, m_expectsInlineQos);
valid &= QosList::addQos(&m_QosList, PID_PARTICIPANT_GUID, this->m_guid);
// 添加所有 Locator 列表、租约时长、BuiltinEndpointSet、ParticipantName、UserData、Properties
for each Locator in m_metatrafficMulticastLocatorList:
valid &= QosList::addQos(&m_QosList, PID_METATRAFFIC_MULTICAST_LOCATOR, locator);
...
valid &= QosList::addQos(&m_QosList, PID_PARTICIPANT_LEASE_DURATION, this->m_leaseDuration);
valid &= QosList::addQos(&m_QosList, PID_BUILTIN_ENDPOINT_SET, this->m_availableBuiltinEndpoints);
valid &= QosList::addQos(&m_QosList, PID_ENTITY_NAME, this->m_participantName);
if (!m_userData.empty())
valid &= QosList::addQos(&m_QosList, PID_USER_DATA, this->m_userData);
if (!m_properties.empty())
valid &= QosList::addQos(&m_QosList, PID_PROPERTY_LIST, this->m_properties);
// 最后根据 endianess 调用 CDR 序列化
valid &= ParameterList::updateCDRMsg(&m_QosList.allQos, LITTLEEND);
if (valid) m_hasChanged = false;
return valid;
}
return true;
}
当 m_hasChanged == true 时,将协议版本、VendorID、GUID、Locator 列表、租约时长、BuiltinEndpointSet、ParticipantName、UserData、Properties 等,按照 RTPS ParameterList 规范打包到 m_QosList.allQos 中,并调用 CDR 序列化。打包成功后将 m_hasChanged 清零。
bool ParticipantProxyData::readFromCDRMessage(CDRMessage_t* msg)
{
if (ParameterList::readParameterListfromCDRMsg(msg, &m_QosList.allQos, NULL) > 0)
{
for (auto* p : m_QosList.allQos.m_parameters)
{
switch (p->Pid)
{
case PID_KEY_HASH:
// 从 key 恢复 GUID
case PID_PROTOCOL_VERSION:
// 兼容性校验
case PID_VENDORID:
// VendorId 拷贝
case PID_EXPECTS_INLINE_QOS:
m_expectsInlineQos = ((ParameterBool_t*)p)->value;
break;
case PID_METATRAFFIC_MULTICAST_LOCATOR:
m_metatrafficMulticastLocatorList.push_back(((ParameterLocator_t*)p)->locator);
break;
...
case PID_ENTITY_NAME:
m_participantName = std::string(((ParameterString_t*)p)->getName());
break;
case PID_PROPERTY_LIST:
m_properties = *((ParameterPropertyList_t*)p);
break;
case PID_USER_DATA:
m_userData = ((UserDataQosPolicy*)p)->getDataVec();
break;
default: break;
}
}
return true;
}
return false;
}
- 使用 ParameterList::readParameterListfromCDRMsg 解析 SPDP 收到的 CDR,填充 m_QosList.allQos.m_parameters。
- 按 Pid 分支,将参数恢复到相应字段。
- 对 PID_PROTOCOL_VERSION 进行向前兼容性校验:若远端版本过低则直接返回 false,弃用该 Participant。
本地信息采集 → initializeData
打包广播 → toParameterList
接收解析 → readFromCDRMessage
动态刷新 → updateData
生命周期管理 → 构造/析构、clear/copy
在 SPDP(Participant 简单发现协议)公告中,最关键的参数标识(ParameterId,PID)及其作用包括:
- PID_PROTOCOL_VERSION
表示 RTPS 协议版本,用于不同实现间的向前兼容性检测。 - PID_VENDORID
标识产品/厂商(如 eProsima),在多厂商环境中可用于隔离或兼容性判断。 - PID_PARTICIPANT_GUID
发布者自身的全局唯一标识(GUID),远端节点通过它区分不同 Participant。 - PID_EXPECTS_INLINE_QOS
指示该 Participant 是否在后续 DATA 消息中期望附带 QoS 信息(Inline QoS),影响后续的样本发送方式。 - PID_METATRAFFIC_UNICAST_LOCATOR / PID_METATRAFFIC_MULTICAST_LOCATOR
SPDP 协议使用的“元流量”单播/组播地址列表,告知远端如何向本地 Participant 发送发现消息。 - PID_DEFAULT_UNICAST_LOCATOR / PID_DEFAULT_MULTICAST_LOCATOR
普通数据流量(非发现)的默认单播/组播地址,后续 SEDP 或数据传输会用到。 - PID_PARTICIPANT_LEASE_DURATION
租约时长(Liveliness Lease Duration),指明多长时间没收到续约就认为该 Participant 已失效。 - PID_BUILTIN_ENDPOINT_SET
位掩码,说明本地 Participant 要 Announce/Detect 哪些内置端点(如 PublicationAnnouncer、SubscriptionDetector 等)。 - PID_ENTITY_NAME
Participant 的可读名称(EntityName),便于日志、调试和监控时识别节点。 - PID_USER_DATA
用户自定义二进制数据,可用于传递应用层特定的元信息或身份验证令牌。 - PID_PROPERTY_LIST
键-值属性列表(Property List),支持扩展静态 EDP、配置注入或其他高级用例。
这些 PID 在 ParticipantProxyData::toParameterList() 中依次被打包进 SPDP 消息,在 readFromCDRMessage() 中被解析恢复,构成了 Participant 级别发现协议的核心。它们保证了节点身份、版本兼容、地址可达性、存活检测和可扩展性的完整传递。


![[Java实战]Spring Boot整合Elasticsearch(二十六)](https://i-blog.csdnimg.cn/direct/ccbb57b42b954e5db2b85e1d577bf4cc.png#pic_center)