Long-Exposure:基于深度学习的长时间曝光合成技术
- 项目概述与技术背景
- 项目核心功能
- 技术原理
- 环境配置与安装
- 硬件要求建议
- 详细安装步骤
- 可选组件安装
- 实战应用指南
- 1. 基础使用:视频转长曝光
- 2. 高级模式:自定义光轨合成
- 3. 批量处理模式
- 技术实现深度解析
- 1. 核心算法流程
- 2. 运动估计模块
- 3. 曝光合成算法
- 常见问题与解决方案
- 1. 内存不足错误
- 2. 光轨断裂问题
- 3. 结果图像噪点多
- 性能优化技巧
- 1. GPU加速实现
- 2. 多进程处理
- 3. 内存映射技术
- 扩展应用与创意玩法
- 1. 光绘艺术创作
- 2. 天文摄影模拟
- 3. 动态模糊增强
- 学术背景与相关研究
- 基础论文
- 前沿技术
- 项目路线图与展望
- 近期开发计划
- 长期发展方向
Long-Exposure是由Kelvins团队开发的一个开源项目,专注于使用计算机视觉和深度学习技术将普通视频或图像序列合成为具有艺术效果的长时间曝光照片。本文将全面剖析该项目的技术原理、实现细节,并提供从环境配置到实际应用的完整指南。
项目概述与技术背景
项目核心功能
Long-Exposure项目实现了以下关键能力:
- 视频转长曝光:将动态视频转换为静态长曝光照片
- 智能轨迹合成:提取移动物体的光轨效果
- 多模式输出:支持光绘、星轨、水流雾化等特效
- 高效计算:利用GPU加速处理流程
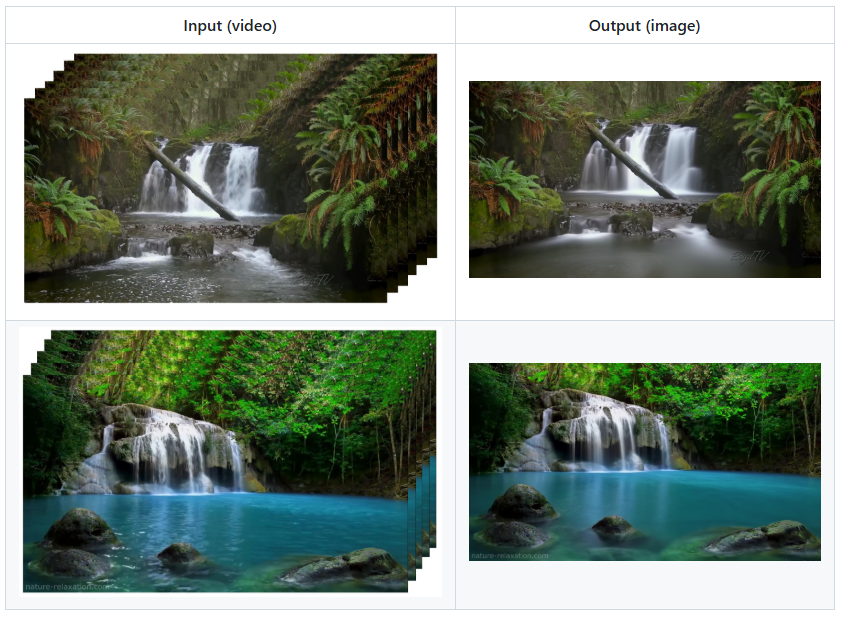
图:项目实现的典型长曝光效果(来源:项目仓库)
技术原理
项目采用的核心算法包括:
- 帧间运动估计:基于光流或特征匹配
- 像素时间积分:模拟真实相机长曝光物理过程
- 运动物体分割:分离静态背景与动态元素
- 噪声抑制:时域降噪处理
环境配置与安装
硬件要求建议
| 组件 | 最低配置 | 推荐配置 |
|---|---|---|
| CPU | Intel i5 | Intel i7/Xeon |
| GPU | 无 | NVIDIA GTX 1060+ |
| 内存 | 8GB | 16GB+ |
| 存储 | 10GB SSD | NVMe SSD |
详细安装步骤
# 克隆仓库
git clone https://github.com/kelvins/long-exposure.git
cd long-exposure
# 创建conda环境(Python 3.8+)
conda create -n longexp python=3.8
conda activate longexp
# 安装核心依赖
pip install -r requirements.txt
# 安装OpenCV(推荐编译版)
pip install opencv-contrib-python-headless
# 验证安装
python -c "import cv2, numpy; print('OpenCV版本:', cv2.__version__)"
可选组件安装
# 安装CUDA加速支持(需先安装CUDA Toolkit)
pip install cupy-cuda11x # 根据CUDA版本选择
# 安装深度学习模型支持
pip install torch torchvision
实战应用指南
1. 基础使用:视频转长曝光
python main.py \
--input videos/fireworks.mp4 \
--output results/fireworks_le.jpg \
--mode light_trails \
--duration 5.0
参数解析:
--input:输入视频/图像序列路径--output:结果保存路径--mode:处理模式(light_trails/waterflow/stars等)--duration:模拟曝光时间(秒)
2. 高级模式:自定义光轨合成
from long_exposure import LongExposureGenerator
# 初始化处理器
processor = LongExposureGenerator(
motion_threshold=0.1, # 运动检测灵敏度
trail_length=15, # 光轨长度
blend_mode='screen' # 混合模式
)
# 处理图像序列
result = processor.process_frames("frames/sequence_*.jpg")
# 保存结果
cv2.imwrite("custom_trail.jpg", result)
3. 批量处理模式
python batch_process.py \
--config configs/city_night.json \
--workers 4
示例配置文件(city_night.json):
{
"input_dir": "data/city_night",
"output_dir": "results/city_night",
"params": {
"mode": "light_trails",
"duration": 8.0,
"fps": 30,
"denoise": true
}
}
技术实现深度解析
1. 核心算法流程
2. 运动估计模块
项目采用两种运动检测方法:
- 稠密光流法(Farneback算法)
flow = cv2.calcOpticalFlowFarneback( prev_frame, next_frame, None, 0.5, 3, 15, 3, 5, 1.2, 0 ) - 稀疏特征法(ORB特征匹配)
orb = cv2.ORB_create() kp1, des1 = orb.detectAndCompute(frame1, None) kp2, des2 = orb.detectAndCompute(frame2, None)
3. 曝光合成算法
核心积分公式实现:
def temporal_integration(frames):
integrated = np.zeros_like(frames[0], dtype=np.float32)
for frame in frames:
# 运动区域加权
motion_mask = calculate_motion(frame)
integrated += frame * motion_mask
return normalized(integrated)
常见问题与解决方案
1. 内存不足错误
现象:MemoryError或Killed进程终止
解决方案:
- 降低处理分辨率:
python main.py --resize 0.5 ... - 使用帧采样:
python main.py --frame_skip 2 ... - 启用流式处理模式:
processor.set_stream_mode(True)
2. 光轨断裂问题
现象:运动轨迹不连续
优化方法:
- 调整运动阈值:
python main.py --motion_thresh 0.05 ... - 增加光流平滑:
processor.set_flow_smooth(True) - 使用深度学习光流(需安装额外模型):
python main.py --flow_model raft ...
3. 结果图像噪点多
现象:输出图像有明显噪声
降噪策略:
- 启用时域降噪:
python main.py --denoise ... - 后处理滤波:
result = cv2.fastNlMeansDenoisingColored(result, None, 10, 10, 7, 21) - 增加采样帧数:
python main.py --min_frames 100 ...
性能优化技巧
1. GPU加速实现
# 启用CUDA加速(需安装CuPy)
import cupy as cp
def gpu_integration(frames):
frame_gpu = cp.asarray(frames[0])
integrated = cp.zeros_like(frame_gpu)
for frame in frames:
frame_gpu = cp.asarray(frame)
integrated += frame_gpu
return cp.asnumpy(integrated)
2. 多进程处理
from multiprocessing import Pool
def process_chunk(chunk):
return processor.process_frames(chunk)
with Pool(4) as p:
results = p.map(process_chunk, frame_chunks)
3. 内存映射技术
# 处理大型视频文件
def stream_video(input_path):
cap = cv2.VideoCapture(input_path)
while True:
ret, frame = cap.read()
if not ret: break
yield frame
cap.release()
processor.process_stream(stream_video("large_video.mp4"))
扩展应用与创意玩法
1. 光绘艺术创作
# 使用自定义画笔轨迹
python creative.py \
--input dance.mp4 \
--output light_painting.jpg \
--brush_mask brushes/star.png
2. 天文摄影模拟
# 星轨合成模式
python main.py \
--input stars/ \
--output star_trails.jpg \
--mode stars \
--duration 3600 \
--stack_mode maximum
3. 动态模糊增强
# 为静态图像添加动态效果
motion_blur = MotionBlurGenerator(
angle=45,
distance=30
)
blurred = motion_blur.apply(image)
学术背景与相关研究
基础论文
-
光流估计:
- Farnebäck G. “Two-Frame Motion Estimation Based on Polynomial Expansion” SCIA 2003
-
时域图像合成:
- Joshi N, et al. “Synthetic Aperture Photography” SIGGRAPH 2006
-
计算摄影:
- Raskar R, Tumblin J. “Computational Photography” AK Peters 2010
前沿技术
- 神经渲染:
- 使用GAN生成更真实的长曝光效果
- 事件相机:
- 基于事件的运动捕捉技术
- HDR合成:
- 结合曝光 bracketing 技术
项目路线图与展望
近期开发计划
-
深度学习集成:
- 基于UNet的运动分割
- Transformer-based时序建模
-
云服务支持:
- AWS Lambda无服务器处理
- Google Colab在线版本
-
移动端优化:
- iOS/Android应用开发
- 实时预览功能
长期发展方向
- 物理模拟:
- 基于流体动力学的光轨模拟
- 交互式编辑:
- 可调节的后期效果
- AR集成:
- 实时长曝光AR效果
Long-Exposure项目通过创新的算法设计和高效的工程实现,使得专业的长曝光摄影技术变得大众化。本文提供的技术解析和实战指南,将帮助用户快速掌握这一工具,并激发更多创意应用的可能性。随着计算摄影技术的发展,这类工具将继续拓展数字影像创作的边界。