一、原理
以下是K最近邻(K-Nearest Neighbors,简称KNN)算法的基本流程,用于对给定点进行分类预测。
1. 获得要预测的点 point_predict 。
2. 计算训练点集 point_set_train 中各点到要预测的点 表 l ist_L2_distance 。
3. 对 point_predict 的L2距离,得到距离列 list_L2_distance 进行排序,得到排序后的索引值列表 list_index_ascend 。
4. 获取超参数 k,表示选择最近邻的个数。
5. 从 list_index_ascend 中取出前 k 个距离最小的索引值,得到对应的训练点集中的点构成的列 表 l ist_k_th 。
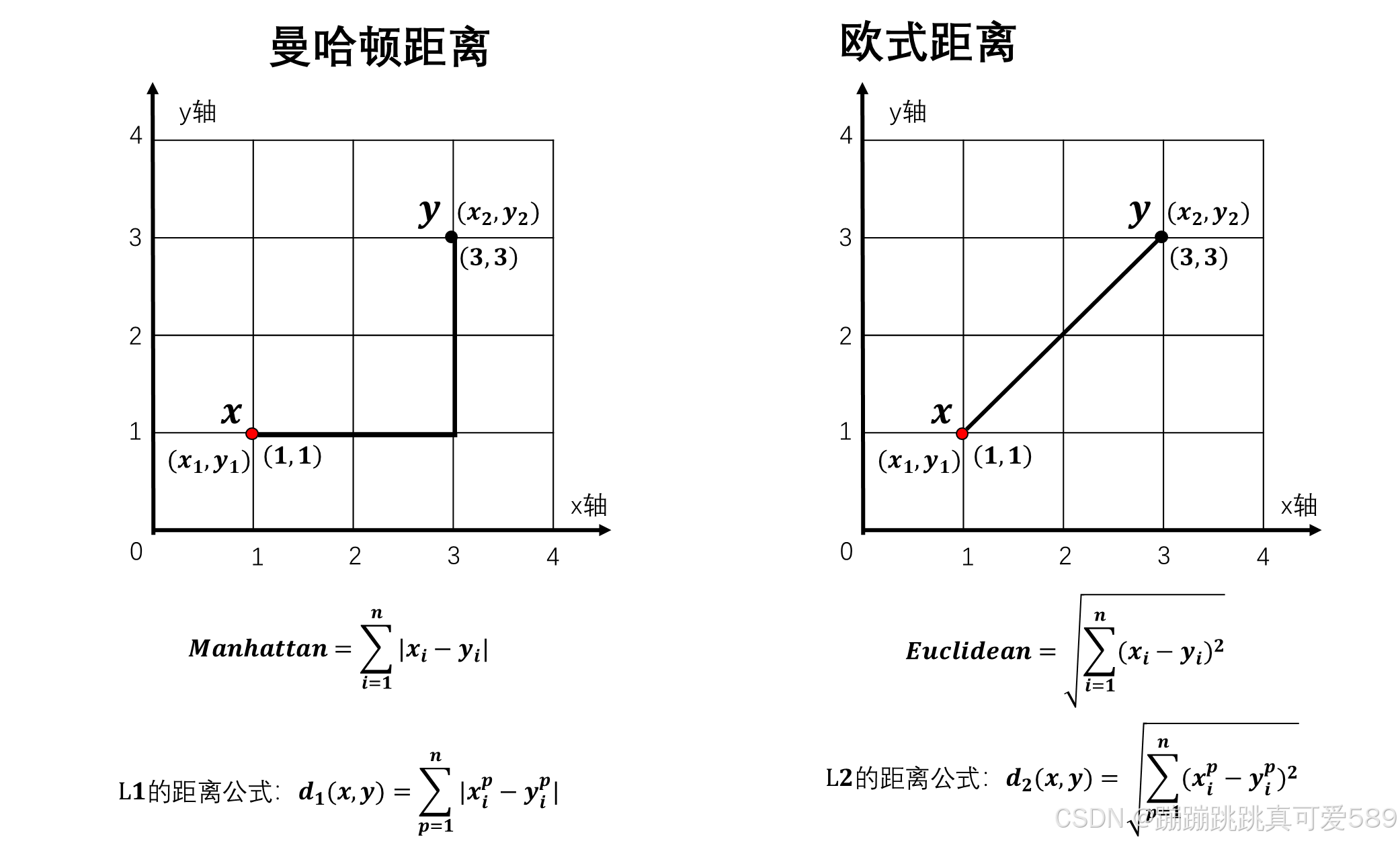
6. 从 list_k_th 中计算各点到要预测的点 point_predict 的L2距离列表,并找到最短距离对应 的训练点的标签 label_L2_distance_min ,即为要预测的点的标签。
这个过程基于KNN算法,通过比较新点与训练集中点的距离来决定新点所属的类别。在这里,超参数 k 决定了用于预测的最近邻点的数量。整个过程的关键是计算距离并选择最近邻的点,然后通过这些最近 邻的点的标签来确定新点的分类。

导入模块
import numpy as np
from matplotlib import pyplot as plt
from collections import Counter1、定义数据集和测试点
# 定义三个点集
point1 = [[7.7, 6.1], [3.1, 5.9], [8.6, 8.8], [9.5, 7.3], [3.9, 7.4], [5.0, 5.3], [1.0, 7.3]]
point2 = [[0.2, 2.2], [4.5, 4.1], [0.5, 1.1], [2.7, 3.0], [4.7, 0.2], [2.9, 3.3], [7.3, 7.9]]
point3 = [[9.2, 0.7], [9.2, 2.1], [7.3, 4.5], [8.9, 2.9], [9.5, 3.7], [7.7, 3.7], [9.4, 2.4]]
# 合并数据集的特征
np_train_data=np.concatenate(np.array((point1,point2,point3)))
# 生成对应的标签
np_train_label=np.array([0]*7+[1]*7+[2]*7)
#定义一个测试点坐标
predict_point=np.array([4,4])
2、定义K的值
K=33、求距离,获得最短距离、最短距离对应的点的坐标楚
distance=np.sqrt(np.sum((predict_point-np_train_data)**2,axis=1))
distance_index=np.argsort(distance)
nearest_index=distance_index[:K]
nearest_points=[]
nearest_distance=[]
nearest_label=[]
#拿到前K个点的对应的坐标和距离
for i in nearest_index:
nearest_points.append(np_train_data[i])
nearest_distance.append(distance[i])
nearest_label.append(np_train_label[i])
counter=Counter(nearest_label)4、绘制
plt.xlabel("x axis label")
plt.ylabel("y axis label")
plt.scatter(np_train_data[np_train_label==0,0],np_train_data[np_train_label==0,1],marker='^')
plt.scatter(np_train_data[np_train_label==1,0],np_train_data[np_train_label==1,1],marker='*')
plt.scatter(np_train_data[np_train_label==2,0],np_train_data[np_train_label==2,1],marker='s')
plt.scatter(predict_point[0],predict_point[1],marker='o')
for i in range(K):
plt.plot([predict_point[0],nearest_points[i][0]],[predict_point[1],nearest_points[i][1]])
plt.annotate(f'{nearest_distance[i]:2.2f}',
xy = ((predict_point[0] + nearest_points[i][0]) / 2,(predict_point[1] + nearest_points[i][1]) / 2))
plt.show()
完整代码
import numpy as np # 导入 NumPy 库用于数值计算
from matplotlib import pyplot as plt # 导入 Matplotlib 库用于数据可视化
from collections import Counter # 导入 Counter 以便于统计标签出现频次
# 1、定义数据集和测试点
# 定义三个点集(表示不同类别的数据点)
point1 = [[7.7, 6.1], [3.1, 5.9], [8.6, 8.8], [9.5, 7.3], [3.9, 7.4], [5.0, 5.3], [1.0, 7.3]] # 类别 0 的点
point2 = [[0.2, 2.2], [4.5, 4.1], [0.5, 1.1], [2.7, 3.0], [4.7, 0.2], [2.9, 3.3], [7.3, 7.9]] # 类别 1 的点
point3 = [[9.2, 0.7], [9.2, 2.1], [7.3, 4.5], [8.9, 2.9], [9.5, 3.7], [7.7, 3.7], [9.4, 2.4]] # 类别 2 的点
# 合并数据集的特征
np_train_data = np.concatenate(np.array((point1, point2, point3))) # 将所有点集合并为一个 NumPy 数组
# 生成对应的标签
np_train_label = np.array([0] * 7 + [1] * 7 + [2] * 7) # 创建标签数组,标识每个点所属的类别
# 定义一个测试点坐标
predict_point = np.array([4, 4]) # 定义需要预测的点坐标
# 2、定义 K 的值
K = 3 # 设置 KNN 中 K 的值为 3,表示考虑最近的 3 个邻居
# 3、求距离,获得最短距离、最短距离对应的点的坐标
distance = np.sqrt(np.sum((predict_point - np_train_data) ** 2, axis=1)) # 计算测试点与所有训练点的欧几里得距离
distance_index = np.argsort(distance) # 获取按距离升序排列的索引
nearest_index = distance_index[:K] # 取出最近的 K 个点的索引
nearest_points = [] # 存储最近 K 个点的坐标
nearest_distance = [] # 存储最近 K 个点的距离
nearest_label = [] # 存储最近 K 个点的标签
# 拿到前 K 个点的对应的坐标和距离
for i in nearest_index:
nearest_points.append(np_train_data[i]) # 添加最近点的坐标
nearest_distance.append(distance[i]) # 添加最近点的距离
nearest_label.append(np_train_label[i]) # 添加最近点的标签
# 统计最近 K 个邻居的标签出现频率
counter = Counter(nearest_label) # 计算标签的频率
print(counter.most_common()[0][0]) # 输出出现频率最高的标签(预测结果)
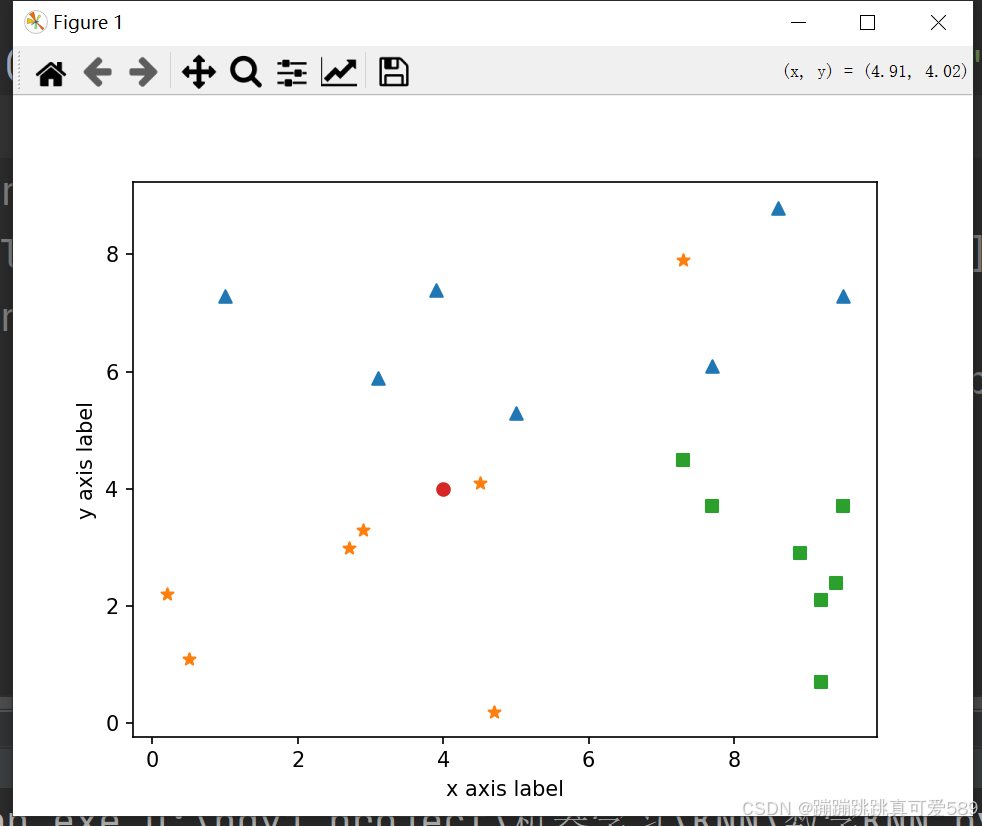
# 4、绘制
plt.xlabel("x axis label") # x 轴标签
plt.ylabel("y axis label") # y 轴标签
# 绘制类别 0 的数据点(标记为三角形)
plt.scatter(np_train_data[np_train_label == 0, 0], np_train_data[np_train_label == 0, 1], marker='^')
# 绘制类别 1 的数据点(标记为星形)
plt.scatter(np_train_data[np_train_label == 1, 0], np_train_data[np_train_label == 1, 1], marker='*')
# 绘制类别 2 的数据点(标记为方形)
plt.scatter(np_train_data[np_train_label == 2, 0], np_train_data[np_train_label == 2, 1], marker='s')
# 绘制待预测点(标记为圆形)
plt.scatter(predict_point[0], predict_point[1], marker='o', color='red')
# 绘制预测点与最近邻居之间的连线
for i in range(K):
plt.plot([predict_point[0], nearest_points[i][0]], [predict_point[1], nearest_points[i][1]], color='grey', linestyle='--') # 画虚线
# 在中间位置添加距离的注释
plt.annotate(f'{nearest_distance[i]:2.2f}',
xy=((predict_point[0] + nearest_points[i][0]) / 2, (predict_point[1] + nearest_points[i][1]) / 2))
plt.show() # 显示绘图结果 二、库函数
2.1、Counter
该模块实现了专门的容器数据类型,提供了 Python 的通用内置容器
from collections import Counter
是用于计算可哈希对象的子类。 它是一个集合,其中元素存储为字典键 它们的计数存储为字典值。允许计数为 任何整数值,包括零或负计数。该类类似于其他语言中的 bags 或 multisets。
| 函数 | 方法 |
|---|---|
| namedtuple() | factory 函数,用于创建具有命名字段的 Tuples 子类 |
| deque | 类似列表的容器,两端都有快速的附加和弹出 |
| ChainMap | 用于创建多个映射的单个视图的类 |
| Counter | dict 子类,用于对可哈希对象进行计数 |
| OrderedDict | dict 子类,该子类会记住已添加的顺序条目 |
| defaultdict | dict 子类,该子类调用工厂函数来提供缺失值 |
| UserDict | Dictionary 对象的包装器,以便于字典子类化 |
| UserList | 包装 list 对象,以便更轻松地进行 list 子类化 |
| UserString | String 对象的包装器,以便更轻松地进行字符串子类化 |
most_common
返回 n 个最常见元素的列表及其从 最常见到最不常见。如果省略 n 或 , 则返回计数器中的所有元素。 计数相等的元素按第一个en countered 的顺序排序:
NoneCounter('abracadabra').most_common(3) [('a', 5), ('b', 2), ('r', 2)]
2.2、annotate()
matplotlib.pyplot.annotate(text, xy, xytext=None, xycoords='data', textcoords=None, arrowprops=None, annotation_clip=None, **kwargs)| 方法 | 描述 |
|---|---|
| text | 批注的文本。 |
| xy | 要注释的点 (x, y)。坐标系已确定 由 xycoords 提供。 |
| xytext | 放置文本的位置 (x, y)。坐标系 由 TextCoords 确定。 |
| xycoords | 给出 xy 的坐标系。 |
| textcoords | 给出 xytext 的坐标系。 |
| arrowprops | 用于在 定位 xy 和 xytext 。默认为 None,即没有箭头是 平局。 由于历史原因,有两种不同的方法可以指定 箭头,“简单”和“花哨”: |
| annotation_clip | 是否在标注 点 xy 位于 Axes 区域之外。
|
| **kwargs | 其他 kwargs 将传递给 |