写在前面:
1. 本文中提到的“股票策略校验工具”的具体使用操作请查看该博文;
2. 文中知识内容来自书籍《同花顺炒股软件从入门到精通》
3. 本系列文章是用来学习技法,文中所得内容都仅仅只是作为演示功能使用
目录
解说
策略代码
结果
解说
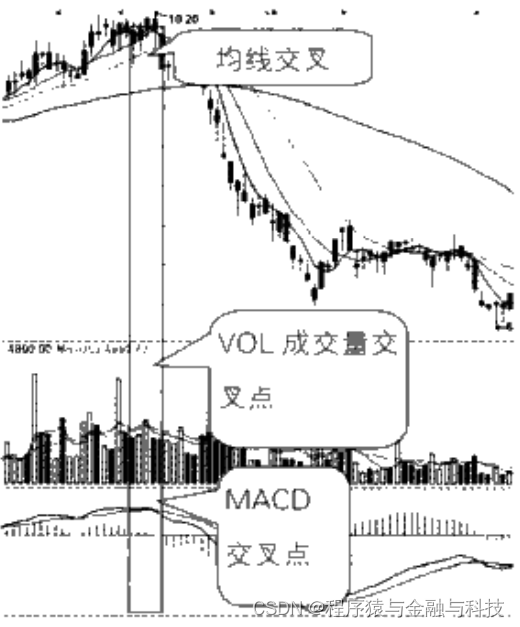
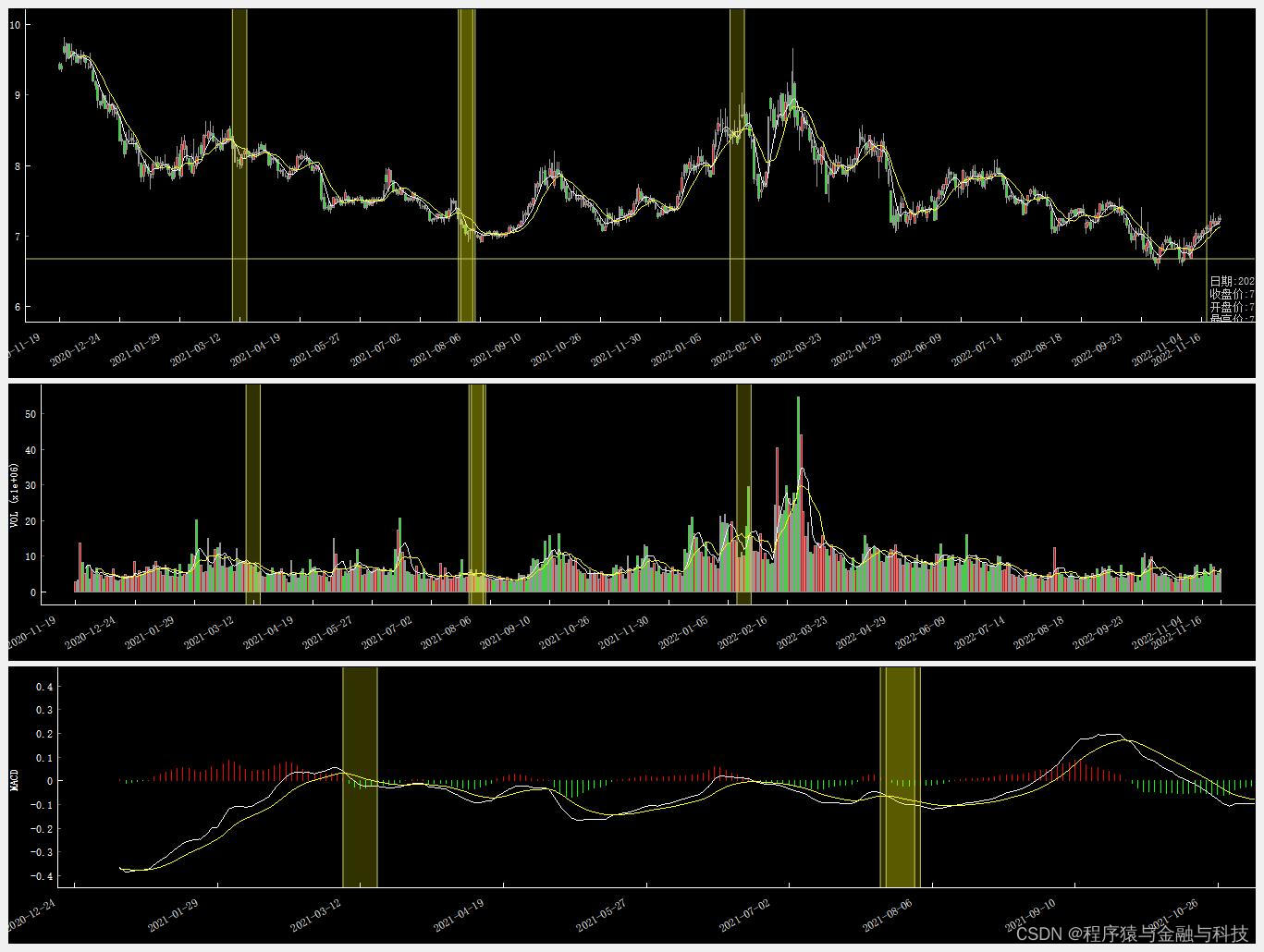
所谓“三种图线交叉点,卖出股票需抢先”,是指均线交叉、MACD线交叉和VOL成交量交叉。在最近两天内连续出现这3种图形交叉,投资者需要尽早抛售手中的股票。
出现“三种图线交叉点,卖出股票需抢先”的形态后,股票投资者需遵循以下操作原则。
1)从上图可以看出,5日移动平均线交叉10日移动平均线,5日均量线(VOL:成交量指标)交叉10日均量线,DIF线交叉MACD线。该形态从三种不同角度客观地分析市场动向,为投资者判断行情恶化提供行之有效的脱身依据,属于大跌之前的最佳卖点。
2)在这种股市形态的实战中,5日均线交叉10日均线,从趋势转化的角度分析上档承接无力,股价只有通过下跌方式寻找新的支撑;5日均量线交叉10日均量线,从上涨缺乏量能配合角度衬托下降的必然;而DIF线交叉MACD线,则从股价顶背离的角度显示弱势状态。
3)当股价处于高位区域时,出现三种图线的同一天或间隔一两天的时间里交叉的走势,可断定趋势已经彻底转变,此时卖出股票虽然已错过相对高点,但可以躲过随之而来更为凶猛的下跌行情。
策略代码
1. 上文解说中MACD使用的是DIFF与MACD的交叉,本策略使用的是DIFF与DEA的交叉
2. 本策略检测的交叉均为死叉
def excute_strategy(base_data,data_dir):
'''
卖出口诀 - 三种图线交叉点,卖出股票需抢先
解析:
1. 两天内连续出现均线交叉、MACD交叉和VOL成交量交叉
自定义:
1. 交叉 =》短线下穿长线
2. 卖出时点 =》 形态出现后下一交易日
3. 胜 =》 卖出后第三个交易日收盘价下跌,为胜
只计算最近两年的数据
:param base_data:股票代码与股票简称 键值对
:param data_dir:股票日数据文件所在目录
:return:
'''
import pandas as pd
import numpy as np
import talib,os
from datetime import datetime
from dateutil.relativedelta import relativedelta
from tools import stock_factor_caculate
def res_pre_two_year_first_day():
pre_year_day = (datetime.now() - relativedelta(years=2)).strftime('%Y-%m-%d')
return pre_year_day
caculate_start_date_str = res_pre_two_year_first_day()
dailydata_file_list = os.listdir(data_dir)
total_count = 0
total_win = 0
check_count = 0
list_list = []
detail_map = {}
factor_list = ['VOL','MACD']
ma_list = ['ma5','ma10']
for item in dailydata_file_list:
item_arr = item.split('.')
ticker = item_arr[0]
secName = base_data[ticker]
file_path = data_dir + item
df = pd.read_csv(file_path,encoding='utf-8')
# 删除停牌的数据
df = df.loc[df['openPrice'] > 0].copy()
df['o_date'] = df['tradeDate']
df['o_date'] = pd.to_datetime(df['o_date'])
df = df.loc[df['o_date'] >= caculate_start_date_str].copy()
# 保存未复权收盘价数据
df['close'] = df['closePrice']
# 计算前复权数据
df['openPrice'] = df['openPrice'] * df['accumAdjFactor']
df['closePrice'] = df['closePrice'] * df['accumAdjFactor']
df['highestPrice'] = df['highestPrice'] * df['accumAdjFactor']
df['lowestPrice'] = df['lowestPrice'] * df['accumAdjFactor']
if len(df)<=0:
continue
# 开始计算
for item in factor_list:
df = stock_factor_caculate.caculate_factor(df,item)
for item in ma_list:
df = stock_factor_caculate.caculate_factor(df,item)
df.reset_index(inplace=True)
df['i_row'] = [i for i in range(len(df))]
df['ma_point'] = 0
df.loc[(df['ma5'].shift(1)>=df['ma10'].shift(1)) & (df['ma5']<df['ma10']),'ma_point'] = 1
df['vol_point'] = 0
df.loc[(df['vol5'].shift(1)>=df['vol10'].shift(1)) & (df['vol5']<df['vol10']),'vol_point'] = 1
df['macd_point'] = 0
df.loc[(df['DIFF'].shift(1)>=df['DEA'].shift(1)) & (df['DIFF']<df['DEA']),'macd_point'] = 1
df['target_yeah'] = df['macd_point'] + df['ma_point'] + df['vol_point'] + df['macd_point'].shift(-1) + df['ma_point'].shift(-1) + df['vol_point'].shift(-1)
df['three_chg'] = round(((df['close'].shift(-3) - df['close'])/df['close'])*100,4)
df['three_after_close'] = df['close'].shift(-3)
df_target = df.loc[df['target_yeah']==3].copy()
# 临时 start
# df.to_csv('D:/temp006/'+ticker + '.csv',encoding='utf-8')
# 临时 end
node_count = 0
node_win = 0
duration_list = []
table_list = []
i_row_list = df_target['i_row'].values.tolist()
for i,row0 in enumerate(i_row_list):
row = row0 + 2
if row >= len(df):
continue
date_str = df.iloc[row]['tradeDate']
cur_close = df.iloc[row]['close']
three_after_close = df.iloc[row]['three_after_close']
three_chg = df.iloc[row]['three_chg']
table_list.append([
i,date_str,cur_close,three_after_close,three_chg
])
duration_list.append([row-3,row+3])
node_count += 1
if three_chg<0:
node_win +=1
pass
list_list.append({
'ticker':ticker,
'secName':secName,
'count':node_count,
'win':0 if node_count<=0 else round((node_win/node_count)*100,2)
})
detail_map[ticker] = {
'table_list': table_list,
'duration_list': duration_list
}
total_count += node_count
total_win += node_win
check_count += 1
pass
df = pd.DataFrame(list_list)
results_data = {
'check_count':check_count,
'total_count':total_count,
'total_win':0 if total_count<=0 else round((total_win/total_count)*100,2),
'start_date_str':caculate_start_date_str,
'df':df,
'detail_map':detail_map,
'factor_list':factor_list,
'ma_list':ma_list
}
return results_data结果
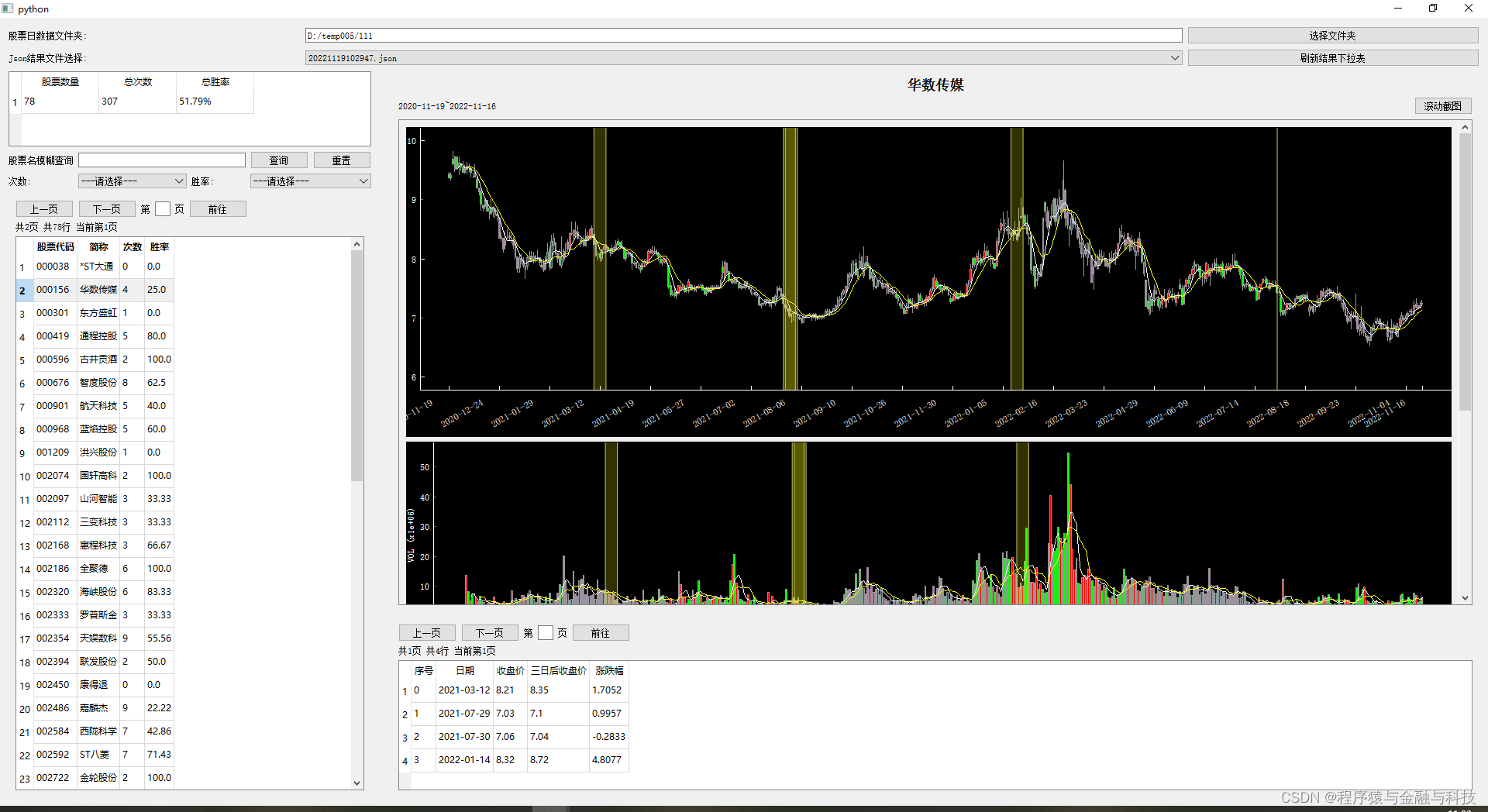
本文校验的数据是随机抽取的81个股票




![[附源码]计算机毕业设计JAVA恒星学院网络计费系统](https://img-blog.csdnimg.cn/b9809fa68ad5448f81f50c10cfb41bc8.png)