目录
一、系统设置
二、系统仿真
三、使用圆极化接收阵列
四、总结
五、程序
此示例演示如何仿真极化双基地雷达系统以估计目标的范围和速度。发射器、接收器和目标运动学被考虑在内。
一、系统设置
该系统以 300 MHz 的频率运行,使用线性 FM 波形,其最大明确范围为 48 公里。距离分辨率为 50 米,时间带宽积为 20。
发射器的峰值功率为 2 kw,增益为 20 dB。接收器还提供20 dB的增益,噪声带宽与波形的扫描带宽相同。 发射天线阵列是位于原点的固定四元件均匀线性Arra(ULA)。该阵列由垂直偶极子组成。
接收天线阵列也是四元件ULA。它距离发射天线[20000;1000;100]米,以[0;20;0]米/秒的速度移动。假设接收数组中的元素也是垂直偶极子。接收天线阵列的方向使其宽侧指向发射天线。
太空中存在两个目标。第一个是建模为球体的点目标;它保留了入射信号的极化状态。它位于距离发射阵列 [15000;1000;500] 米处,以 [100;100;0] m/s 的速度移动。 第二个目标距离发射阵列[35000;-1000;1000]米,并以[-160;0;-50]米/秒的速度接近。与第一个目标不同,第二个目标翻转入射信号的极化状态,这意味着输入信号的水平极化分量成为输出信号的垂直极化分量,反之亦然。
单个散射矩阵是目标的一个相当简单的极化模型。它假设无论入射和反射方向如何,H和V分量之间的功率分配都是固定的。然而,即使是这样一个简单的模型也可以揭示仿真中复杂的目标行为,因为首先,H 和 V 方向因不同的入射和反射方向而异;其次,由局部坐标系定义的目标方向也会影响偏振匹配。
二、系统仿真
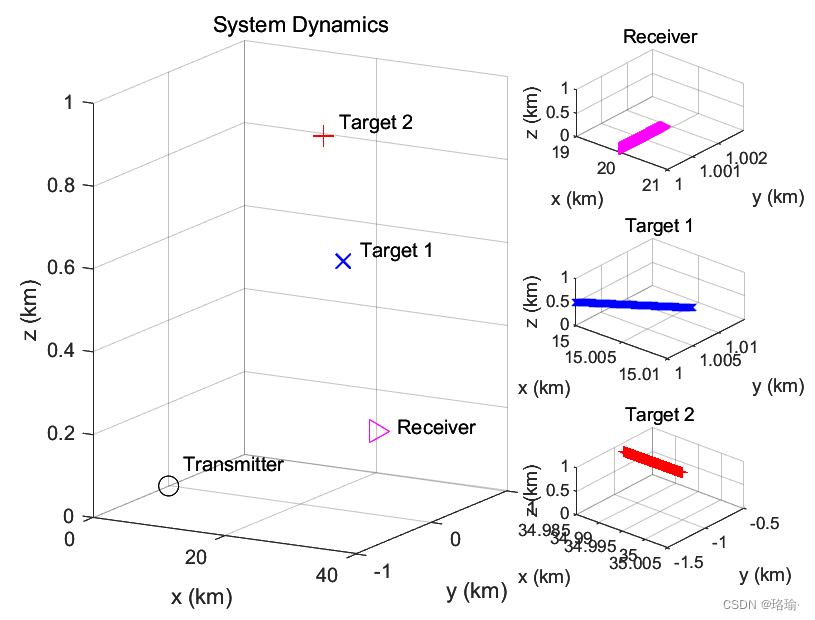
下一节模拟 256 个接收到的脉冲。接收阵列朝两个目标进行波束成形。第一个图显示了系统设置以及接收阵列和目标的移动方式。第二张图显示了接收器阵列每接收64个脉冲生成的距离多普勒图。
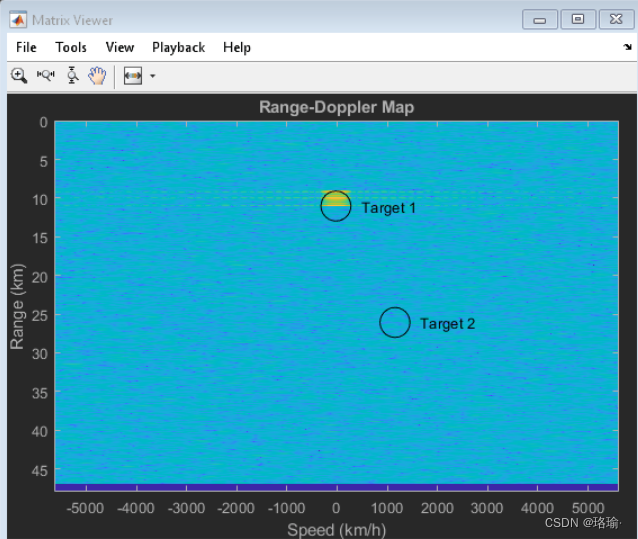
距离多普勒图仅显示第一个目标的返回。这可能不足为奇,因为发射和接收阵列都是垂直极化的,第二个目标将垂直极化波映射到水平极化波。来自第二个目标的接收信号大多与接收阵列的极化正交,导致明显的极化损耗。可能还会注意到,生成的范围和径向速度与目标相对于发射器的范围和径向速度不一致。这是因为在双基地配置中,估计范围实际上是目标范围相对于发射器和接收器的几何平均值。同样,估计的径向速度是相对于发射器和接收器的目标径向速度之和。地图中的圆圈显示目标应出现在距离多普勒图中的位置。需要进一步处理才能确定目标的确切位置,但这超出了此示例的范围。
三、使用圆极化接收阵列
垂直偶极子是实际应用中非常流行的发射天线选择,因为它成本低且具有全向模式。但是,之前的仿真表明,如果在接收器中使用相同的天线,则存在系统错过某些目标的风险。因此,线性极化天线通常不是最佳选择,因为无论线性极化如何对齐,始终存在正交极化。如果反射信号具有接近该方向的偏振状态,则偏振损耗会变大。
解决此问题的一种方法是在接收端使用圆极化天线。圆极化天线不能完全匹配任何线性极化。但另一方面,无论线性极化方向如何,圆极化天线和线极化信号之间的极化损耗均为3 dB。因此,尽管它从未提供最大的回报,但它永远不会错过目标。常用的圆极化天线是交叉偶极子天线。 下一节将展示当交叉偶极子天线用于形成接收阵列时会发生什么。
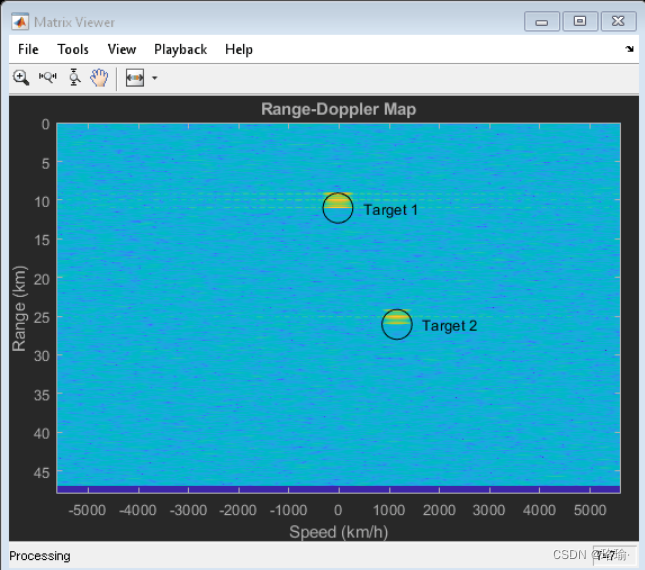
距离多普勒地图现在在正确的位置显示两个目标。
四、总结
本例显示了双基地极化雷达的系统级仿真。该示例为不同的发射和接收阵列极化配置生成接收信号的距离多普勒图,并展示了如何使用圆极化天线来避免由于目标的偏振散射特性而丢失线性极化信号。
五、程序
使用Matlab R2022b版本,点击打开。

打开下面的“BistaticPolarimetricExample.m”文件,点击运行,就可以看到上述效果。
关注下面公众号,后台回复关键词:仿真极化双基地雷达系统,发送源码链接。