1.更新gazebo到gazebo11
1)查看我们的gazebo插件(我这里已经是gazebo11了,但对于ubuntu18.04的同学来说应该是gazebo9)
dpkg -l | grep gazebo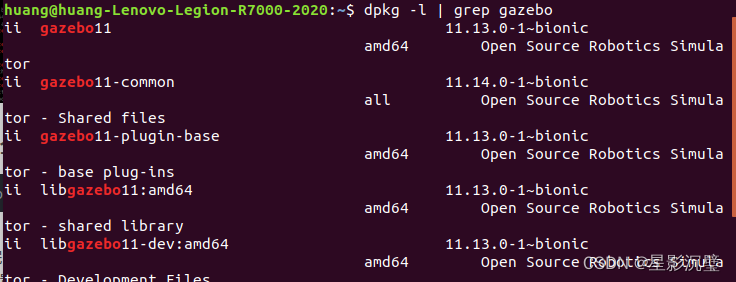
2)卸载gazebo9的插件
sudo apt-get purge gazebo9 gazebo9-common gazebo9-plugin-base libgazebo9:amd64 libgazebo9-dev:amd64 ros-melodic-gazebo-*
3)配置镜像
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
4) 设置Key
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
5)更新
sudo apt-get update6)安装gazebo11
sudo apt-get install gazebo11
sudo apt-get install libgazebo11-dev
7)安装gazebo的ros插件
sudo apt install ros-melodic-gazebo11-*
8)检验gazebo安装
gazebo9)启动ros和gazebo
roscore
rosrun gazebo_ros gazebo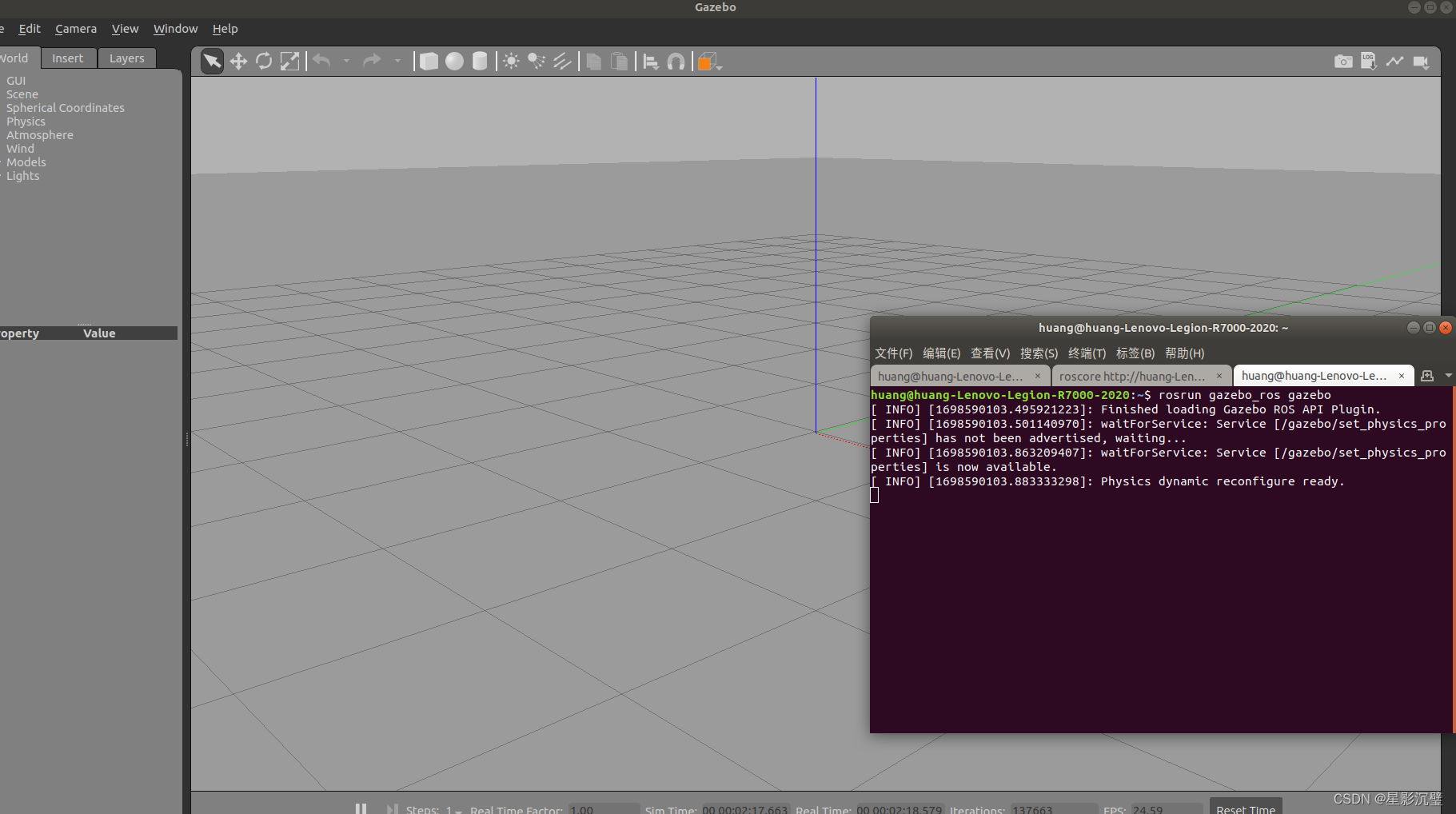
10)验证ros和gazebo连接成功
rostopic list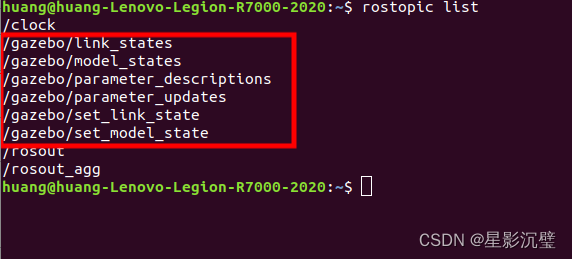
11)gazebo的服务列表
rosservice list
1.先建立一个工作空间
mkdir -p gazebo_ws/src
cd gazebo_ws/src/

2.安装功能包
git clone https://gitee.com/bingda-robot/bingda_tutorials

3.编译工作空间
cd ..
catkin_make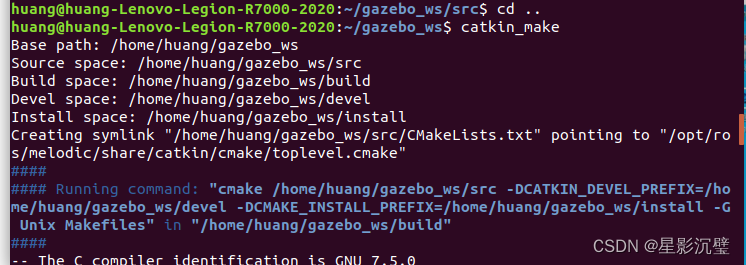
4.安装依赖
sudo apt install ros-$ROS_DISTRO-gazebo-ros ros-$ROS_DISTRO-gazebo-ros-control ros-$ROS_DISTRO-gazebo-plugins ros-$ROS_DISTRO-robot-state-publisher