无人船和无人车正越来越多地用于水深地形测量。使用这些平台采集数据的技术得到普遍的应用,但数据的融合仍然需要深入研究,其融合方法通常依赖于所使用的传感器和测量区域的特性。本文提出了一种融合无人艇(USV)和无人机(UAV)采集的数据建立数字地形模型的方法。文中案例涉及浅水、极浅水,直至与海岸线的区域。
综合测深数据的方法目前使用各种方法来获取测深数据,包括在水面或水面以下使用水声传感器的水文方法,以及从空中平台或卫星进行遥感的方法。传统的水文测量方法包括广泛的测量技术,从测量标杆到单波束回声测深仪(SBE),再到先进的水声技术,如多波束回声测深仪(MBE)。遥感方法涉及多谱段航空和卫星图像处理以及测深激光雷达(光探测和测距)测量。值得注意的是,USV正越来越多地用于许多测量技术,其主要优势在于减少了操作员的工作量,并使在浅水和受限水域进行测量成为可能。另一方面,无人机既可以用作摄影测量平台,也可以用作激光雷达平台。还有一些混合解决方案,能够使用低空飞行的无人机拖曳的回声测深仪或综合探地雷达(GPR)获取水深测量数据。使用基于USV的平台进行水文测量的许多解决方案也越来越多地得到使用。
这些方法中的每一种都有其局限性,运行效果依赖水体的条件和类型。水声测量主要的制约因素是水的深度,能否让水声安全穿过,而遥感更关注水和水体的参数,如水的透明度、水深或底质类型。因此,不同来源的数据通常需要融合合并,以产生覆盖整个调查区域的统一测深模型。
摄影测量和遥感主要应用于浅水和极浅水水域,这些水域常常无法使用水声测量设备。在这些水域进行有效测量,必须将水声测量和摄影测量方法结合起来。不幸的是,来源于不同传感器的数据集具有不同的范围和结构,与点的密度或数量、空间分布以及测量误差有关。因此,数据恰当整合需要开发专门的技术。
浅水数据采集
本案例涉及UAV和USV获取的数据。研究区域位于波兰大别湖一个带有海滩的小海湾。调查区域面积2.71公顷,水域底部较平坦,湾口凹坑较多。研究区平均深度约1m,最大深度3.95m。摄影测量数据是通过DJI Phantom Pro测量平台获得的,使用的是在湖底建立地面控制点(GCP)的经典方法。经过图像处理获取的数据集为密度高达每平方米300个离散分布的点。这种方法的优点是可以获取从海岸线、极浅水到浅水的水深地形数据。极浅水区特别重要,因为在建立这一区域的数字地形模型时,测深数据的缺乏不能总是用内插方法来弥补。往期研究表明,这样做会导致更高的编译错误。
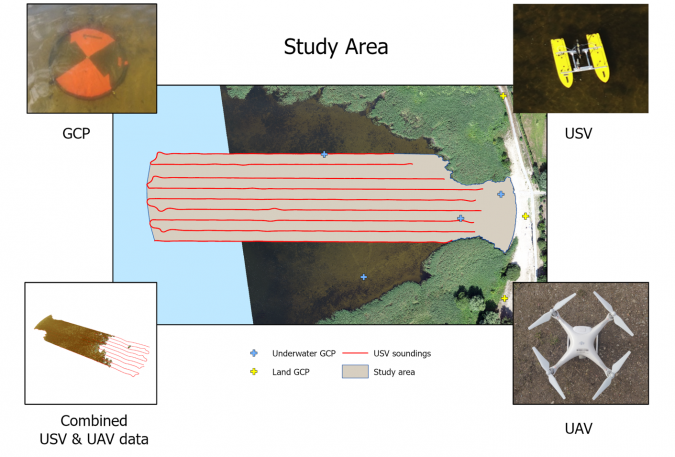
不幸的是,由于水的透明度差,使用摄影测量方法可以有效地获得深度为1.3米的数据。这里需要指出的是,对于内陆水域,即使使用激光雷达测深,在许多情况下,测量深度也只能达到1.6至2米。水声方法获得的数据是对更深深度的测深数据的自然补充。为此,带有SBES传感器的USV也是有必要的(见图1)。

水深剖面测线间隔10m,水深点间距约为0.3-0.4米。所获得的数据是通过分析个别回声和选定的深度来提高质量的。这种测量的优点是它可以在单一剖面和更深水测量中获得准确的校正数据。另一方面,缺点是无法调查极浅水深或有障碍物的区域(水下植被、树下树枝和渔网等)。测量区域和所使用的测量载具如图2所示。
地理处理方法
数据融合方法使用地理信息数据处理方法,基于参考文献中描述的研究方法开发。处理过程的主要内容是水深参考面,在此基础上选择从无人机获得的经过后处理的深度数据。25厘米的不确定度被视为与水深参考面可接受偏差的阈值,这在此偏差内的所有点都被保留。在数据的最终处理之前,反复实验选择合适的数据过滤掩码、点云类型和插值方法。使用示例数据进行地理处理的示意图如图3所示。
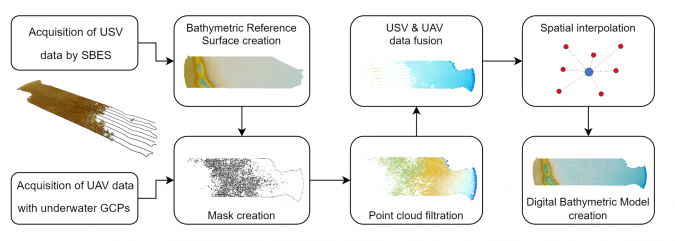
由于单波束数据的获取和处理是按照水深测量方法进行的,因此我们更多关注无人机数据。在实验过程中,摄影测量数据是采用传统方法处理的,只不过是在水下建立了像控点。这种方法与大多数使用被动遥感的方法不同,没有考虑到电磁波在水中的折射。此外,我们分析了两种类型的无人机点云。第一种是全云,包括所有的点类,第二种是地面类云。过滤点云的通用掩码是设置与水深参考面的偏差阀值。最后一步是对不同的内插方法进行了定性和定量分析,并通过这些方法开发出数字测深模型。
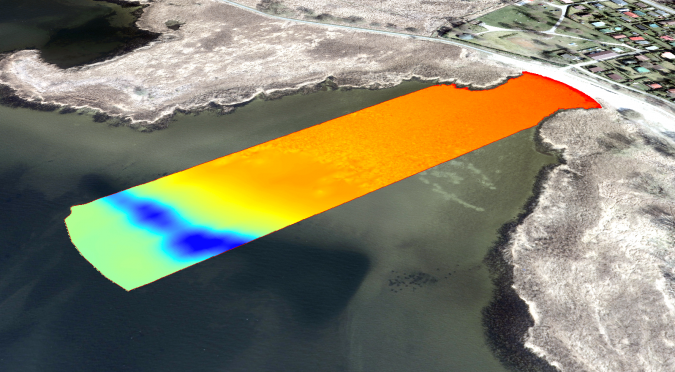
分析表明使用由地面类云开发的无人机点云能获得最好的结果。不幸的是,并非所有的插值方法在由无人船剖面线和无人机点云组成的数据结构上都表现良好,如径向基函数(RBF)方法。数字水深模型(DBM)生成可以采用三角网法、最近邻点插值法、克里金或反距离加权等插值方法,这些方法在重建地表的精度方面可以得到相当的结果。生成的融合数字水深模型如图4所示。
结论
实验表明本文提出的地理信息数据处理方法能融合浅水区和极浅水区水深数据并生成统一的数字水深模型,其中包括无人机点云的生成、使用掩码的点过滤以及空间插值方法的使用。该方法的基本要素包括使用传统摄影测量方法获取测深数据,换句话说,主要是水下像控点、地面级无人机点云和内插方法选择使用。该方法的另一个重要因素是基于水深参考面的无人机数据的处理。该方法不考虑折射因素对水深数据的生成进行了简化,其局限性也必须考虑,例如应用于小区域和需要建立水下摄影框架。由于摄影测量方法正式成为获取水深数据的来源之一,任何评估这类数据的实际适用性及其处理方法的研究都是有价值的。
参考文献
https://www.hydro-international.com/content/article/development-of-digital-bathymetric-models-from-hydroacoustic-and-photogrammetric-data
![[附源码]java毕业设计基于的前端课程学习网站](https://img-blog.csdnimg.cn/21b04bd875df4f32b28548dd2ef6933e.png)