先解读Sort算法:Simple online and realtime tracking
论文地址 https://arxiv.org/abs/1602.00763
代码地址
https://github.com/abewley/sort
https://github.com/YunYang1994/openwork/tree/master/sort
SORT 流程简介:
整个流程如下图所示:在第 1 帧时,人体检测器 detector 输出 3 个 bbox(黑色),模型会分别为这 3 个 bbox 创建卡尔曼滤波追踪器【tracker】 kf1,kf2 和 kf3。所以注意第一帧的追踪器是用目标检测的框创建的,ID也是我们手动赋予的。
对应人的编号为 1,2,3 。在第 2 帧的过程 a 中,如下图frame-2a,这 3 个跟踪器【每个人都有一个tracker】会利用上一帧的状态分别输出棕红色 bbox、黄色 bbox 和 青绿色 bbox。
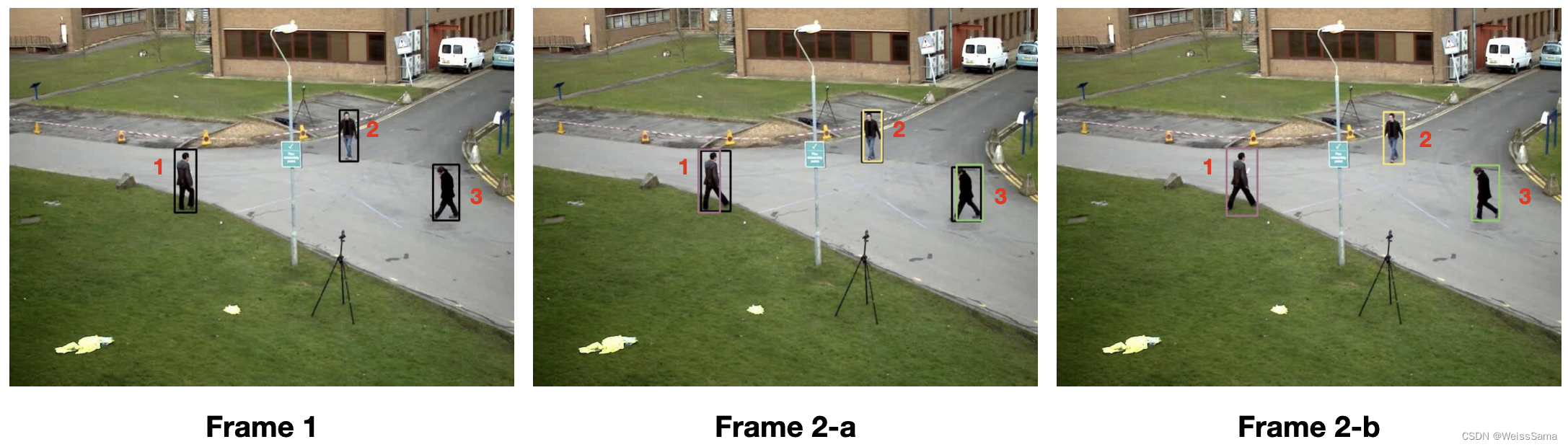
由于frame1中三个黑色bbox只是目标检测模型的输出,它们是没有bbox id的,所以,我们需要把目标检测框,和卡尔曼滤波的预测框进行一种关联,使得目标检测框的id就是滤波器的预测框id。
在SORT算法中,关联的核心是目标检测框和滤波器预测框之间的iou + 匈牙利算法的匹配。
我们计算一下Frame1 和 Frame2-a框之间的iou 如下:
| iou | 黑色bbox1 | 黑色bbox2 | 黑色bbox3 |
|---|---|---|---|
| 棕红色 bbox | 0.91 | 0 | 0 |
| 黄色 bbox | 0 | 0.98 | 0 |
| 青绿色 bbox | 0 | 0 | 0.99 |
上述表格可以抽象为一个矩阵。矩阵中每一个值都是目标检测框到滤波器预测框之间的iou 。
我们若要求使得这个iou矩阵的值最大,那么这个矩阵就被称为利益矩阵profit matrix,若要使之最小,则被称为花费矩阵cost matrix。我们如果想让跟踪状态完美,就要求得这个iou矩阵的最大利益矩阵。
而SORT算法对iou值进行了一个变换,将iou值都变成1-iou,求的是1-iou矩阵的最小值。
这里的1-iou被定义为:目标检测框到滤波器预测框之间的iou距离。并且使用匈牙利算法进行最小化求解,这里用1-iou 或者-iou 都可以算法复杂度为O(n^3)。例子如下:
import numpy as np
from scipy.optimize import linear_sum_assignment
cost_matrix = np.array([[0.09, 1.00, 1.00],
[1.00, 0.02, 1.00],
[1.00, 1.00, 0.01]])
rows, cols = linear_sum_assignment(cost_matrix)
matches = list(zip(rows, cols)) # [(0, 0), (1, 1), (2, 2)] 得到匹配队列
这样我们就根据iou的值得到了匹配队列。
图解1:
图解2
KalmanBoxTracker
注意对应代码一起看
2.1卡尔曼滤波参数
状态变量 x 的设定是一个 7维向量:x=[u, v, s, r, u^, v^, s^]T。u、v
分别表示目标框的中心点位置的 x、y 坐标,s 表示目标框的面积,r 表示目标框的宽高比。 u^ ,v^ ,s^ 分别表示横向、纵向 、面积 s 的运动变化速率。
参数初始化
u、v、s、r 初始化:根据第一帧的观测结果进行初始化。
u^ ,v^ ,s^ 初始化:当第一帧开始的时候初始化为0,到后面帧时会根据预测的结果来进行变化。
转换函数1:
def convert_bbox_to_z(bbox): 将 bbox 从 [x1,y1,x2,y2] 格式变成 [x,y,s,r] 4x1格式
转换函数2:
def convert_x_to_bbox(x,score=None): 将 bbox 从 [x,y,s,r] 格式变成 [x1,y1,x2,y2]格式,score是optional项
定义如下:
def convert_bbox_to_z(bbox):
"""
将 bbox 从 [x1,y1,x2,y2] 格式变成 [u,v,s,r] 格式,s是框的面积,r是w/h比例
"""
w = bbox[2] - bbox[0]
h = bbox[3] - bbox[1]
x = bbox[0] + w/2.
y = bbox[1] + h/2.
s = w * h #scale is just area
r = w / float(h)
return np.array([x, y, s, r]).reshape((4, 1))
def convert_x_to_bbox(x,score=None):
"""
将 bbox 从 [u,v,s,r] 格式变成 [x1,y1,x2,y2] 格式
"""
s = x[2] #w*h
ratio = x[3] # w/h
w = np.sqrt(s * r)
h = s / w
if(score==None):
return np.array([x[0]-w/2.,x[1]-h/2.,x[0]+w/2.,x[1]+h/2.]).reshape((1,4))
else:
return np.array([x[0]-w/2.,x[1]-h/2.,x[0]+w/2.,x[1]+h/2.,score]).reshape((1,5))
状态转移矩阵 F
F被定义为一个7x7的矩阵,跟踪的目标被一个匀速运动目标,通过 7x7 的状态转移矩阵F 乘以 7*1 的状态变量 x 即可得到一个更新后的 7x1 的状态更新向量x
观测矩阵H
H被定义为一个 4x7 的矩阵,乘以 7x1 的状态更新向量 x 即可得到一个 4x1 的 [u,v,s,r] 的估计值。
协方差矩阵 RPQ
测量噪声的协方差矩阵 R: diag([1,1,10,10].T)
先验估计的协方差矩阵 P:diag([10,10,10,10,1e4,1e4,1e4].T)
过程激励噪声的协方差矩阵 Q:diag([1,1,1,1,0.01,0.01,1e-4].T)
hits = 总的匹配次数
hit_streak 连续匹配次数
time_since_update 连续没有匹配到目标检测框的次数
id = KalmanBoxTracker.count 记录当前追踪器的id
2.2 predict 追踪器预测阶段
在预测阶段,追踪器不仅需要预测 bbox,还要记录它自己的当前匹配情况。如果这个追踪器连续多次预测而没有进行一次更新操作,那么表明该跟踪器可能已经“失活”了。因为它没有和检测框匹配上,说明它之前记录的目标有可能已经消失或者误匹配了。但是也不一定会发生这种情况,还一种结果是目标在连续几帧消失后又出现在画面里。
考虑到这种情况,使用 time_since_update 记录了追踪器连续没有匹配上的次数,该变量在每次 predict 时都会加 1,每次 update 时都会归 0。并且使用了 max_age 设置了追踪器的最大存活期限,如果跟踪器出现超过连续 max_age 帧都没有匹配关联上,
即当 tracker.time_since_update > max_age 时,该跟踪器则会被判定失活而被移除列表。
2.3 update 更新阶段
大家都知道,卡尔曼滤波器的更新阶段是使用了观测值 z 来校正误差矩阵和更新卡尔曼增益,并计算出先验估计值和测量值之间的加权结果,该加权结果即为后验估计值。
class KalmanBoxTracker(object):
"""
This class represents the internal state of individual tracked objects observed as bbox.
"""
count = 0
def __init__(self,bbox):
"""
用初始目标检测框来初始化追踪器
"""
#定义匀速运动模型
self.kf = KalmanFilter(dim_x=7, dim_z=4)
#状态变量是7维, 观测值是4维的,按照需要的维度构建目标
# 状态变量x的定义见下文
self.kf.F = np.array([[1,0,0,0,1,0,0], # 状态转移矩阵 7x7 维度
[0,1,0,0,0,1,0],
[0,0,1,0,0,0,1],
[0,0,0,1,0,0,0],
[0,0,0,0,1,0,0],
[0,0,0,0,0,1,0],
[0,0,0,0,0,0,1]])
self.kf.H = np.array([[1,0,0,0,0,0,0], # 观测矩阵,4x7 维度
[0,1,0,0,0,0,0],
[0,0,1,0,0,0,0],
[0,0,0,1,0,0,0]])
self.kf.R[2:,2:] *= 10.
self.kf.P[4:,4:] *= 1000. #give high uncertainty to the unobservable initial velocities
self.kf.P *= 10.
self.kf.Q[-1,-1] *= 0.01
self.kf.Q[4:,4:] *= 0.01
self.kf.x[:4] = convert_bbox_to_z(bbox)
self.time_since_update = 0
self.id = KalmanBoxTracker.count
KalmanBoxTracker.count += 1
self.history = [] # 存放着多个 [x1,y1,x2,y2]
self.hits = 0 # 总的匹配次数
self.hit_streak = 0 # 连续匹配次数
self.age = 0
def update(self,bbox):
"""
用检测框更新追踪框
"""
self.time_since_update = 0
self.history = []
self.hits += 1
self.hit_streak += 1
self.kf.update(convert_bbox_to_z(bbox)) # bbox 是观测值 [x1,y1,x2,y2] --> [u,v,s,r]
def predict(self):
"""
Advances the state vector and returns the predicted bounding box estimate.
"""
if((self.kf.x[6]+self.kf.x[2])<=0):
self.kf.x[6] *= 0.0
self.kf.predict()
self.age += 1
if(self.time_since_update>0): # 一旦出现不匹配的情况,连续匹配次数归0
self.hit_streak = 0
self.time_since_update += 1 # 否则连续匹配次数+1
self.history.append(convert_x_to_bbox(self.kf.x)) # # [u,v,s,r] --> [x1,y1,x2,y2]
return self.history[-1]
def get_state(self):
"""
Returns the current bounding box estimate.
"""
return convert_x_to_bbox(self.kf.x)
3. bbox 关联匹配
bbox 的关联匹配过程在前面已经讲得很详细了,它是将 tracker 输出的预测框(注意是先验估计值)和 detector 输出的检测框相关联匹配起来。输入是 dets: [[x1,y1,x2,y2,score],…] 和 trks: [[x1,y1,x2,y2,tracking_id],…] 以及一个设定的 iou 阈值,该门槛是为了过滤掉那些低重合度的目标。
代码中linear assigment使用的匈牙利算法我们在本文最后面详细介绍。
def associate_detections_to_trackers(dets, trks, iou_threshold = 0.3):
"""
Assigns detections to tracked object (both represented as bounding boxes)
dets:
[[x1,y1,x2,y2,score],...]
trks:
[[x1,y1,x2,y2,tracking_id],...]
Returns 3 lists of matches, unmatched_detections and unmatched_trackers
"""
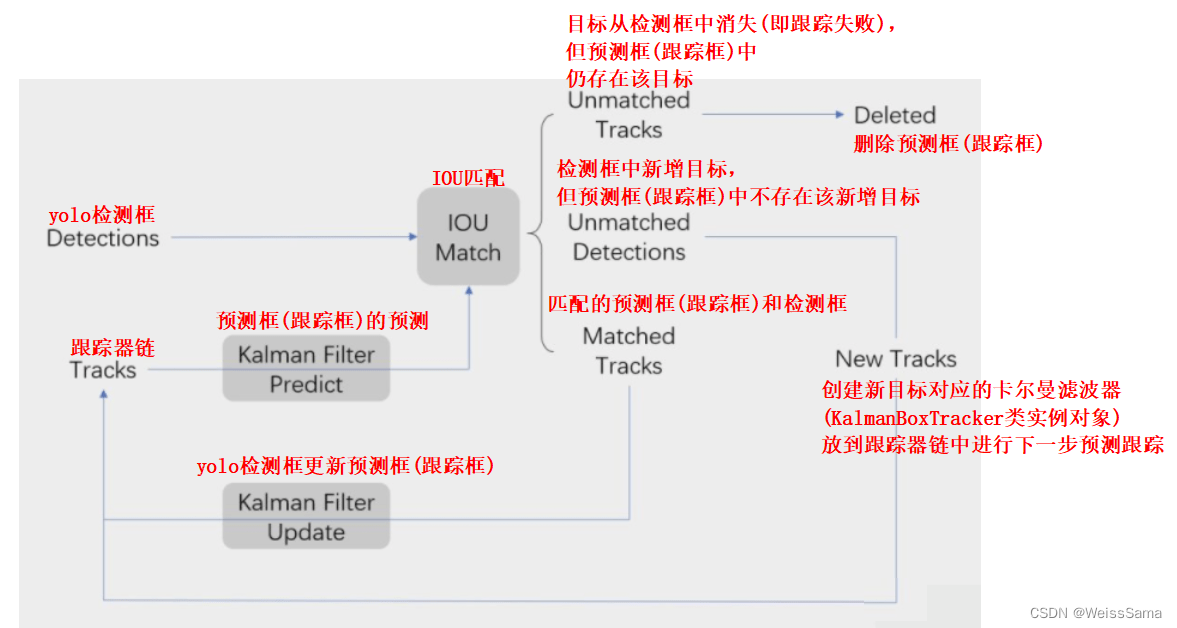
该过程返回三个列表:
matches(已经匹配成功的追踪器),
unmatched_detections(没有匹配成功的检测目标)
unmatched_trackers(没有匹配成功的跟踪器)
对于已经匹配成功的追踪器,则需要用观测值(目标检测框)去更新校正 tracker 并输出修正后的 bbox;对于没有匹配成功的检测目标,则需要新增 tracker 与之对应;
对于没有匹配成功的跟踪器,如果长时间处于失活状态,则可以考虑删除了。
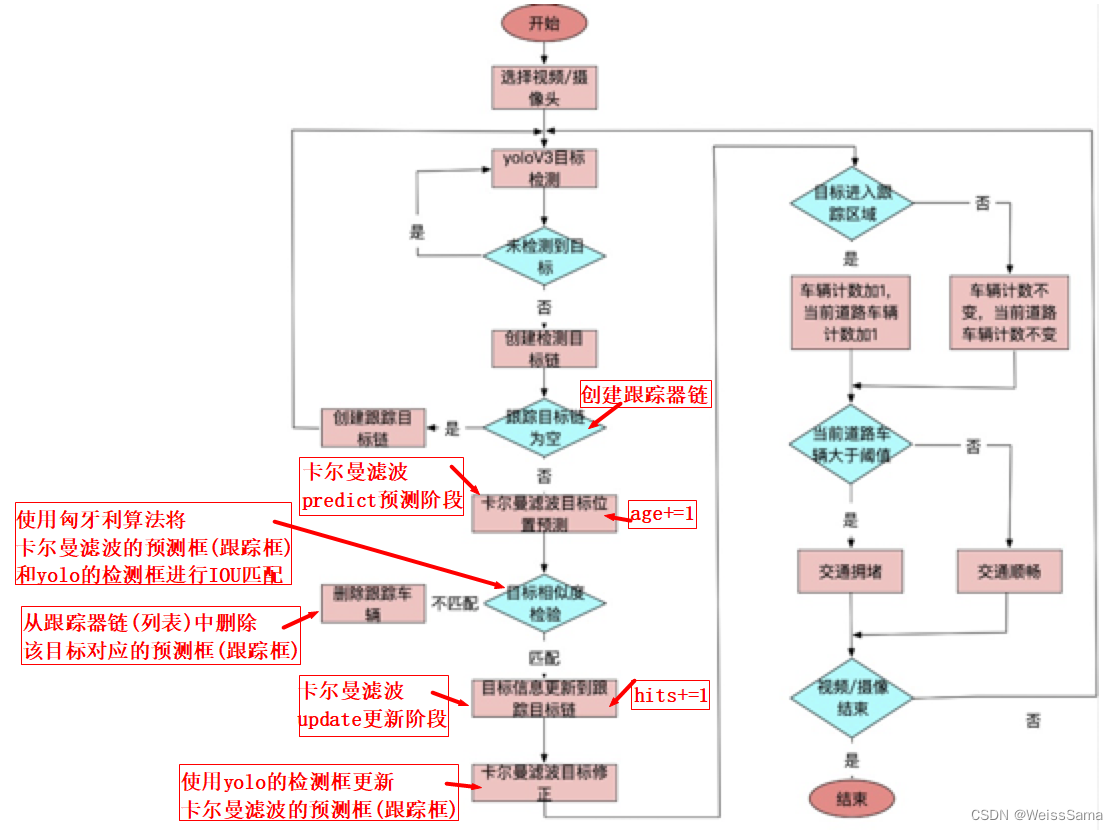
所以整理多目标跟踪MOT算法的流程如下:
看完上图流程图,我们来仔细看看objec detection box和 Kalman Filter tracker之间关联的具体逻辑:
def associate_detections_to_trackers(detections,trackers,iou_threshold = 0.3):
"""
detections[ x1, y1 ,x2, y2, score, ... ] Nx5
trackers [:, x1, y1, x2, y3, tracker_id, ... ] Mx5
图中IOU Match版块用于将检测与跟踪进行关联
将目标检测框匹配到滤波器预测框tracker。
返回 三个列表 matches, unmatched_detections and unmatched_trackers
"""
if(len(trackers)==0): #如果跟踪器为空
return np.empty((0,2),dtype=int), np.arange(len(detections)), np.empty((0,5),dtype=int)
#初始化检测器与跟踪器IOU Matrix
iou_matrix = np.zeros((len(detections),len(trackers)),dtype=np.float32)
#计算det 和 tracker 之间的iou matrix
for d, det in enumerate(detections):
for t, trk in enumerate(trackers):
iou_matrix[d,t] = iou(det,trk) #计算检测器与跟踪器的IOU并赋值给 iou matrix 对应位置
#最终iou_matrix的shape是NxM
matched_indices = linear_assignment(-iou_matrix) #只是粗匹配,后面还要过滤iou低的
# 这里的linear assignment使用的就是匈牙利算法
# 加上负号是因为linear_assignment求的是最小代价组合,而我们需要的是IOU最大的组合方式,所以取负号
# 参考的是:https://blog.csdn.net/herr_kun/article/details/86509591
unmatched_detections = [] #未匹配上的检测器
for d, det in enumerate(detections):
if(d not in matched_indices[:, 0]): #如果检测器中第d个检测结果不在匹配结果索引中,则d未匹配上
unmatched_detections.append(d)
unmatched_trackers = [] #未匹配上的跟踪器
for t, trk in enumerate(trackers):
if(t not in matched_indices[:,1]): #如果跟踪器中第t个跟踪结果不在匹配结果索引中,则t未匹配上
unmatched_trackers.append(t)
# filter out matched pair with low IOU,过滤掉那些IOU较小的匹配对
matches = [] #存放过滤掉低iou之后的最终匹配结果
for m in matched_indices: #遍历粗匹配结果
if(iou_matrix[m[0], m[1]] < iou_threshold):
# m[0]是检测框ID, m[1]是跟踪框ID,如果它们的IOU小于阈值则将它们视为未匹配成功
unmatched_detections.append(m[0])
unmatched_trackers.append(m[1])
else:
matches.append(m.reshape(1,2)) # 匹配上的则以 [[d,t]...] 形式放入 matches 矩阵
if(len(matches)==0): #如果过滤后匹配结果为空,那么返回空的匹配结果
matches = np.empty((0,2),dtype=int)
else: #如果过滤后匹配结果非空,则按0轴【纵向】继续添加匹配对
matches = np.concatenate(matches,axis=0)
# 返回:跟踪成功的矩阵,新增物体的矩阵, 消失物体的矩阵
return matches, np.array(unmatched_detections), np.array(unmatched_trackers)
# matches有2列,第1列是检测框id,第2列是预测框id
# unmatched_detections有5列,前4列是xyxy,第5列是score
# 其中跟踪器数组是5列的(最后一列是ID)
将上述所有流程串联起来就得到了SORT算法
class Sort(object):
def __init__(self, max_age=1, min_hits=3, iou_threshold=0.3):
"""
Sets key parameters for SORT
"""
self.max_age = max_age # 在没有目标检测关联的情况下追踪器存活的最大帧数
self.min_hits = min_hits # 追踪器初始化前的最小关联检测数量
self.iou_threshold = iou_threshold
self.trackers = [] # 用于存储卡尔曼滤波追踪器的列表
self.frame_count = 0 # 当前追踪帧的编号
def update(self, dets=np.empty((0, 5))):
"""
Params:
输入的是目标检测矩阵,形式是[[x1,y1,x2,y2,score],[x1,y1,x2,y2,score],...]
这个方法对每一帧都必须使用一次,即使该帧没有检测到任何目标。
返回相似度矩阵,矩阵最后一列是追踪框ID
NOTE:输入的检测框个数 和 返回的框个数,可能是不同的
"""
self.frame_count += 1 # 帧数+1
trks = [] # 用于存放跟踪预测的 bbox: [x1,y1,x2,y2,id]
# 初始化的时候self.trackers是空的,跳过下面的for循环
for i, tracker in enumerate(self.trackers): # 遍历卡尔曼跟踪列表
pos = tracker.predict()[0]
# 用卡尔曼跟踪器 trackers预测 bbox
if not np.any(np.isnan(pos)): # 如果卡尔曼的预测框有效
trks.append([pos[0], pos[1], pos[2], pos[3], 0]) # 存放上一帧所有物体预测有效的 bbox
else:
self.trackers.remove(tracker) # 如果无效, 删除该滤波器
trks = np.array(trks)
self.trks = trks # 为了显示跟踪器预测的框,把它拿出来
# 将目标检测的 bbox 和卡尔曼滤波预测的跟踪 bbox 匹配
# 获得 跟踪成功的矩阵,新增物体的矩阵,消失物体的矩阵
matched, unmatched_dets, unmatched_trks = associate_detections_to_trackers(dets, trks, self.iou_threshold)
# 跟踪成功的物体 bbox 信息更新到对应的卡尔曼滤波器
for m in matched:
self.trackers[m[1]].update(dets[m[0], :])
# 为新增物体创建新的卡尔曼滤波跟踪器
for i in unmatched_dets:
tracker = KalmanBoxTracker(dets[i,:])
self.trackers.append(tracker)
# 跟踪器更新校正后,输出最新的 bbox 和 id
ret = []
for tracker in self.trackers:
if (tracker.time_since_update < 1) and (tracker.hit_streak >= self.min_hits or self.frame_count <= self.min_hits):
d = tracker.get_state()[0]
ret.append([d[0], d[1], d[2], d[3], tracker.id+1]) # +1 as MOT benchmark requires positive
# 长时间离开画面/跟踪失败的物体从卡尔曼跟踪器列表中删除
if(tracker.time_since_update > self.max_age):
self.trackers.remove(tracker)
# 返回当前画面中所有被跟踪物体的 bbox 和 id,矩阵形式为 [[x1,y1,x2,y2,id]...]
return np.array(ret) if len(ret) > 0 else np.empty((0,5))