今天突发奇想,准备一个总结系列,以备面试只需,嘿嘿,忘了就回来看看,以框架流程为主,不涉及细节、
点云
-
pointnet
代码仓库
https://github.com/yanx27/Pointnet_Pointnet2_pytorch
参考博客
论文阅读笔记 | 三维目标检测——PointNet
PointNet++详解(一):数据增强方法
一文搞懂PointNet全家桶——强势的点云处理神经网络
3D点云深度学习PointNet源码解析——数据预处理
【3D计算机视觉】从PointNet到PointNet++理论及pytorch代码
【三维目标分类】PointNet++详解(一)
-
数据
代码中的数据处理 provider.py 中
随机顺序 shuffle_data() shuffle_points()
随机旋转 rotate_perturbation_point_cloud_with_normal()
随机噪声 jitter_point_cloud()
随机平移 shift_point_cloud()
随机缩放 random_scale_point_cloud()
随机丢弃 random_point_dropout() -
模型
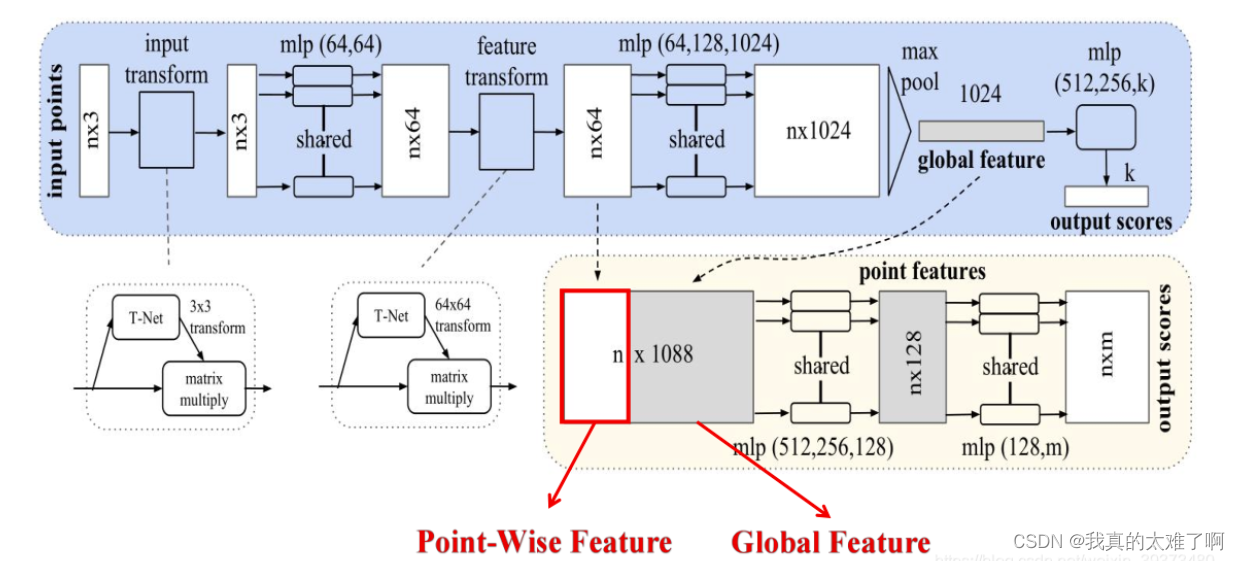
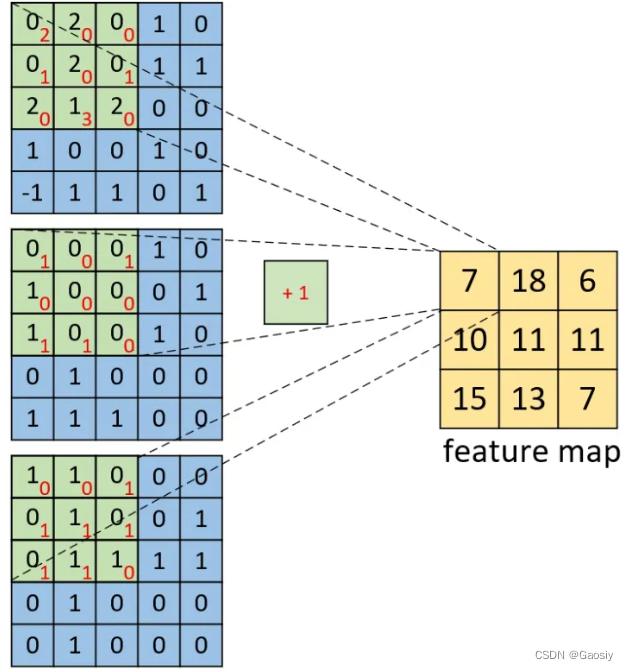
具体来说,对于每一个N × 3 N\times 3N×3的点云输入,网络先通过一个T-Net将其在空间上对齐(旋转到正面),再通过MLP将其映射到64维的空间上,再进行对齐,最后映射到1024维的空间上。这时对于每一个点,都有一个1024维的向量表征,而这样的向量表征对于一个3维的点云明显是冗余的,因此这个时候引入最大池化操作,将1024维所有通道上都只保留最大的那一个,这样得到的1 × 1024 的向量就是N 个点云的全局特征。1.输入为一帧的全部点云数据的集合,表示为一个nx3的2d tensor,其中n代表点云数量,3对应xyz坐标。(输入的维度是 nx3 是二维的)
2.输入数据先通过和一个T-Net学习到的转换矩阵相乘来对齐,保证了模型的对特定空间转换的不变性。(T-Net是针对点云旋转不变性设计的网络,目的是将点云旋转到合适的位置)
3.通过多次mlp对各点云数据进行特征提取后,再用一个T-Net对特征进行对齐。(用mlp提取特征是为了将点云升维(到 nx1024),以便后面进行max-pooling,不至于最终特征很少)
4.在特征的各个维度上执行maxpooling操作来得到最终的全局特征。
5.对分类任务,将全局特征通过mlp来预测最后的分类分数;对分割任务,将全局特征和之前学习到的各点云的局部特征进行串联(concat),再通过mlp得到每个数据点的分类结果。
-
-
pointnet++
- 数据








![[计算机组成原理(唐朔飞 第2版)]第一章 计算机系统概论 第二章 计算机的发展及应用(学习复习笔记)](https://img-blog.csdnimg.cn/57182f64d70e47789e83acd0cc36b36d.png)