robotiq 2f 140安装在UR3机械臂后面在gazebo仿真中散架、抖动
搭建环境:
ubuntu: 20.04
ros: Nonetic
sensor: robotiq_ft300
gripper: robotiq_2f_140_gripper
UR: UR3
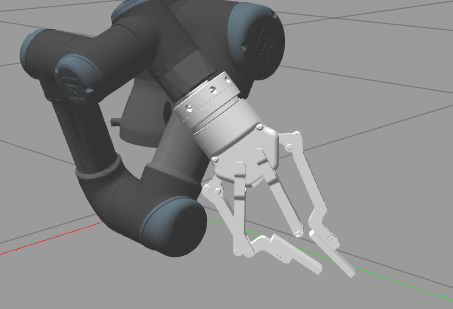
通过上一篇博客配置好ur3、力传感器和robotiq夹爪的gazebo仿真环境后,夹爪看起来要散架了,还会一直抖动
解决办法:
1. 安装gazebo插件
robotiq 2f140 gripper有主动关节(finger joint)和被动关节(mimic joint). 标准Gazebo不支持Mimic 关节仿真, 所以需要安装一个插件。
插件下载地址
cd ~/catkin_ws/src
git clone https://github.com/roboticsgroup/roboticsgroup_upatras_gazebo_plugins.git
然后编译一下,记得source一下,如果编译不过的话就删除之前编译的build和devel文件夹再试试看
cd ~/catkin_ws
catkin_make
source devel/setup.bash
2. 修改xacro文件
上一篇博客增加的代码在调用夹爪的时候,调用的是robotiq_2f_140_gripper_visualization文件夹下的xacro文件,如下图所示,但是它不支持Mimic 关节仿真, 所以需要用到上面安装的插件,要怎么用呢?
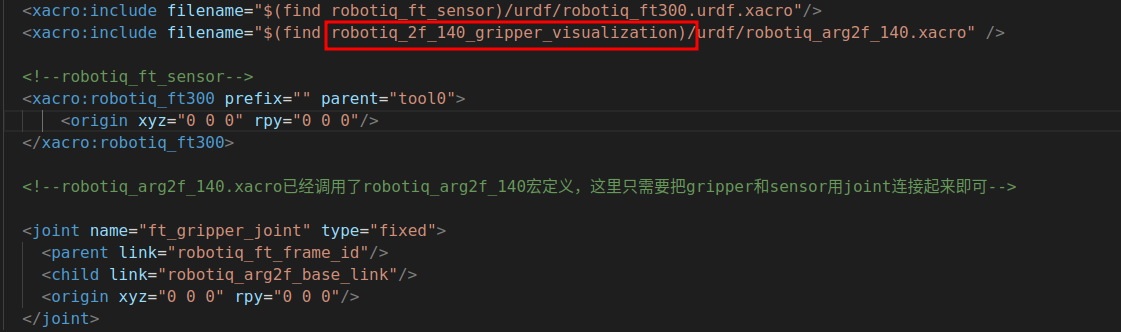
仔细观察robotiq工具包中有这样一个文件robotiq_2f_140_gripper_gazebo,点进去看会发现它里面也调用了robotiq_2f_140_gripper_visualization中的urdf文件,但是它已经把调用插件的方式写好了,所以不用我们来写怎么使用这个插件来避免夹爪散架和抖动,直接调用就行
找到上一篇博客gazebo仿真中添加夹爪、力传感器等代码的xacro文件,即使universal_robot/ur_gazebo/urdf/ur_macro.xacro,将下面图中红框的地方改成gazebo

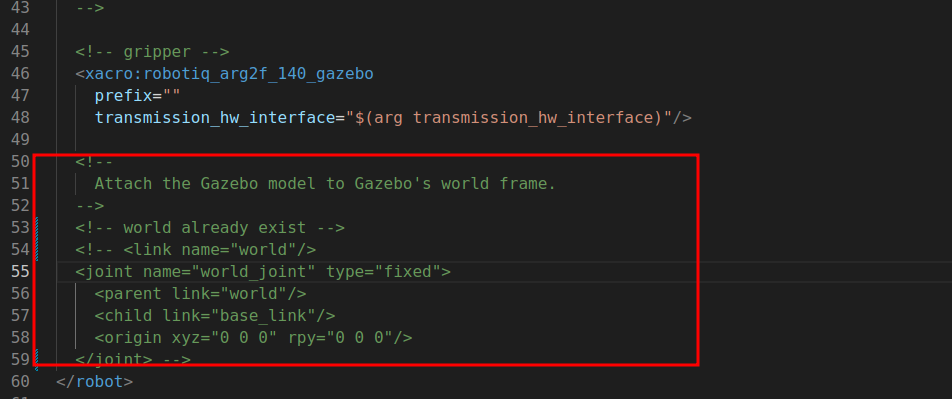
然后修改一下robotiq_2f_140_gripper_gazebo/urdf中的robotiq_arg2f_140.xacro文件,将下面红框中的代码注释,避免和机械臂那边的world link冲突
3. 查看效果
运行代码,打开gazebo仿真
cd ~/catkin_ws
source devel/setup.bash
roslaunch ur_gazebo ur3_bringup.launch
可以看到夹爪终于正常了,虽然还有一些抖动