声明:文章没有官方的代码,这里自己浅显的分析一下。
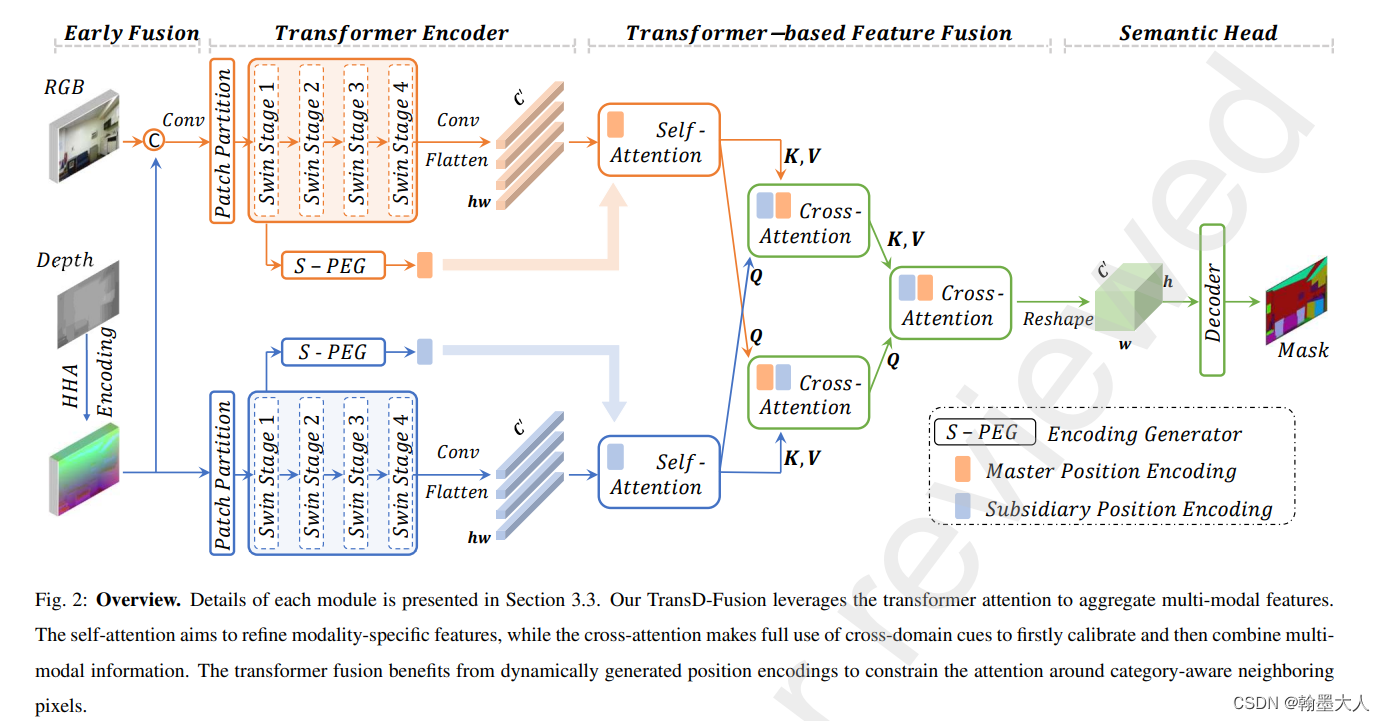
首先看一下encoder,就是swin transformer,假设RGB的维度为(1,3,480,480),Depth维度为(1,1,480,480)。维度分别变为**(1,64,120,120)—>(1,64,120,120)—>(1,128,60,60)—>(1,256,30,30)—>(1,512,15,15)。**
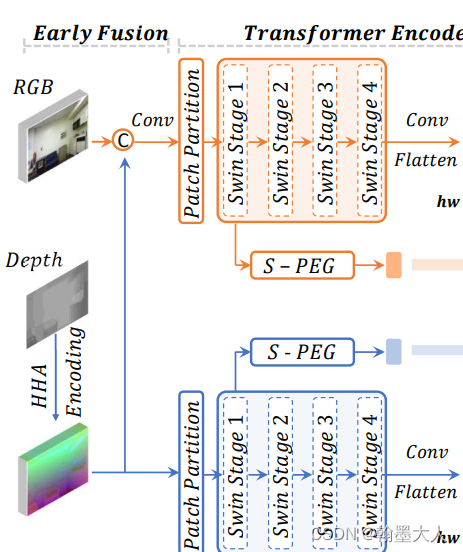
接着经过卷积,然后展平。在原文中,通道进行了减少,假设我们这里通过一个1x1卷积,将通道由512缩减到256.然后进行展平,(1,256,15,15)展平为(1,256,225)。
接着输入到三步融合模块中。
首先大小和维度经过融合后是不发生变换的。即输出也为(1,256,225)。
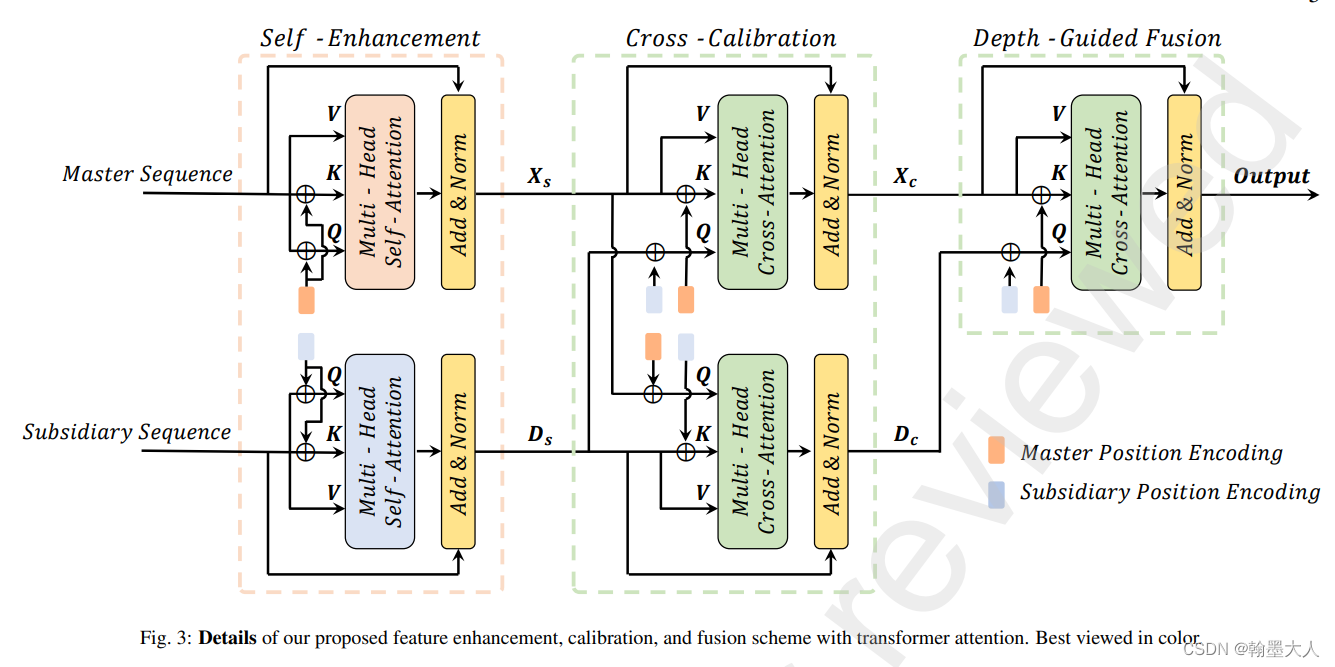
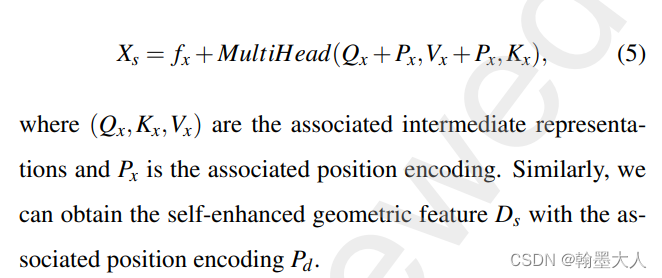
然后就是图中的位置编码:
既然他能和K和Q进行相加,那么维度肯定是匹配的。
公式:我们可以看到位置编码是在生成Q,K,V之后才加上的。而非先加上再生成Q,K,V因为V就没有加位置编码。且这个地方采用的多头,对每一个头的Q和V进行相加。
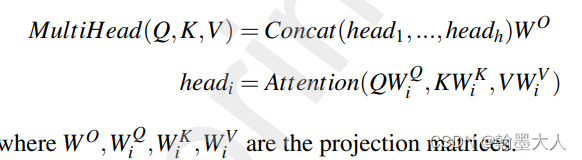

把公式5括号里面的参数带入到multihead(Q,K,V)中。
关于这个地方位置编码的相加存在一些疑问:
首先他的计算方式和VIT的一样,没有什么不同,但是关键在于只对Q和K进行相加,对V没有加。
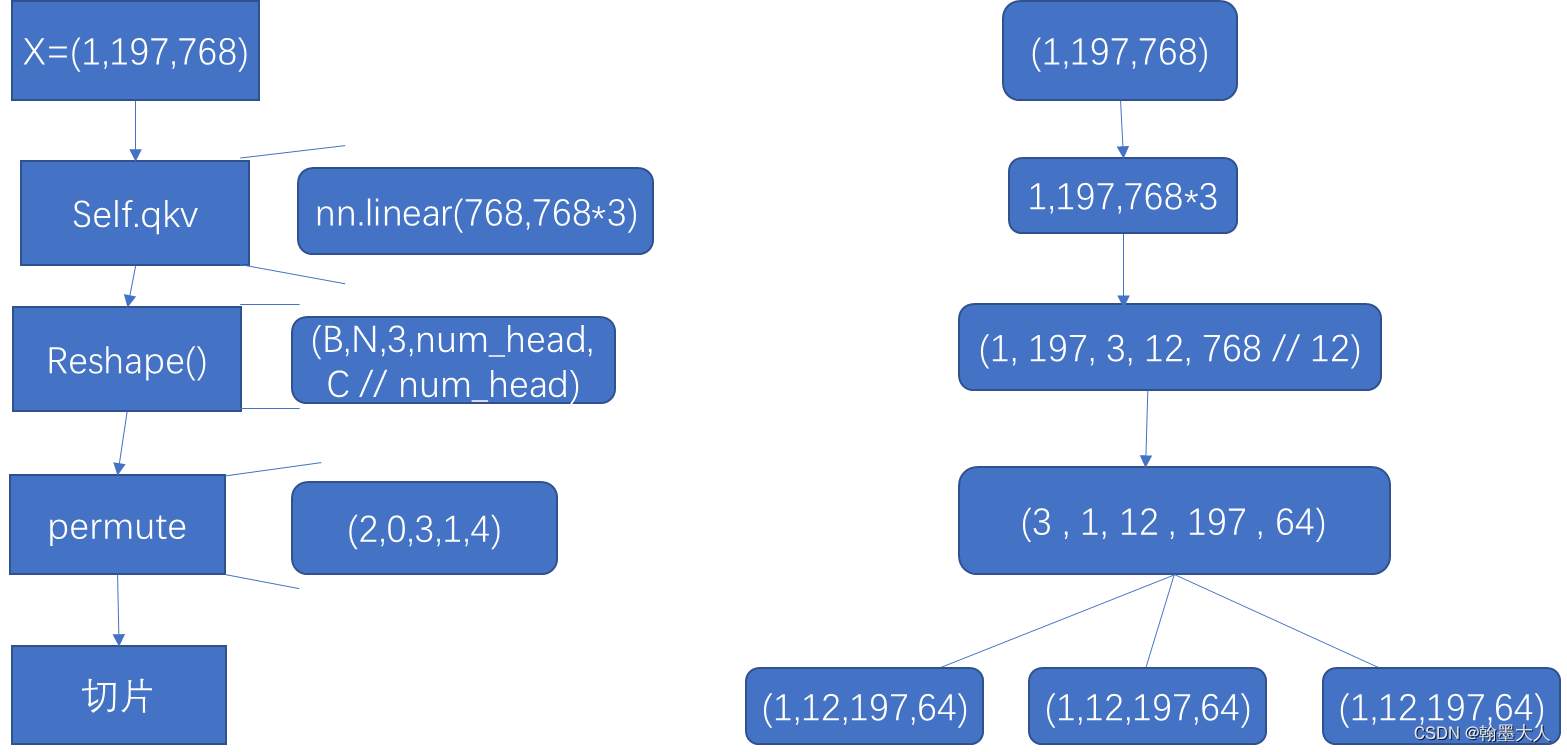
我们看VIT的维度变化,VIT使用了多头注意力计算。本来每个头的Q,K,V都计算一次,即每次只有一个头,有多少个头计算多少次,然后总的结果按照维度进行拼接。
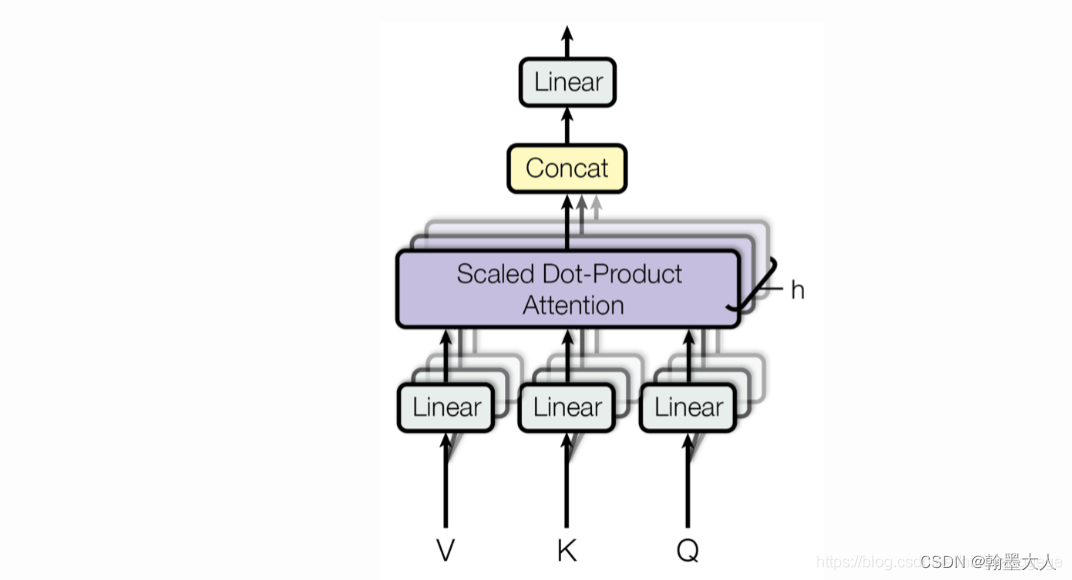
在代码中(12个头),实现的是Q,K,V有12个头,Q,K,V总共只计算一次。
在本文中,位置编码为第一个stage的输出,即(1,14400,64)。经过reshape为图片(1,64,120,120)。我们知道self.attention的输入为(1,225,256)。那么如果要相加,需要把维度升高到256,即原文中的投影到高维空间(语义信息就更丰富)。然后经过两个3x3卷积进行局部特征提取,最后进行下采样,reshape到序列。
我们猜测一下(1,64,120,120)—>(1,256,120,120)—>(1,256,120,120)—>(1,256,120,120)—>(1,256,15,15)—>(1,225,256)
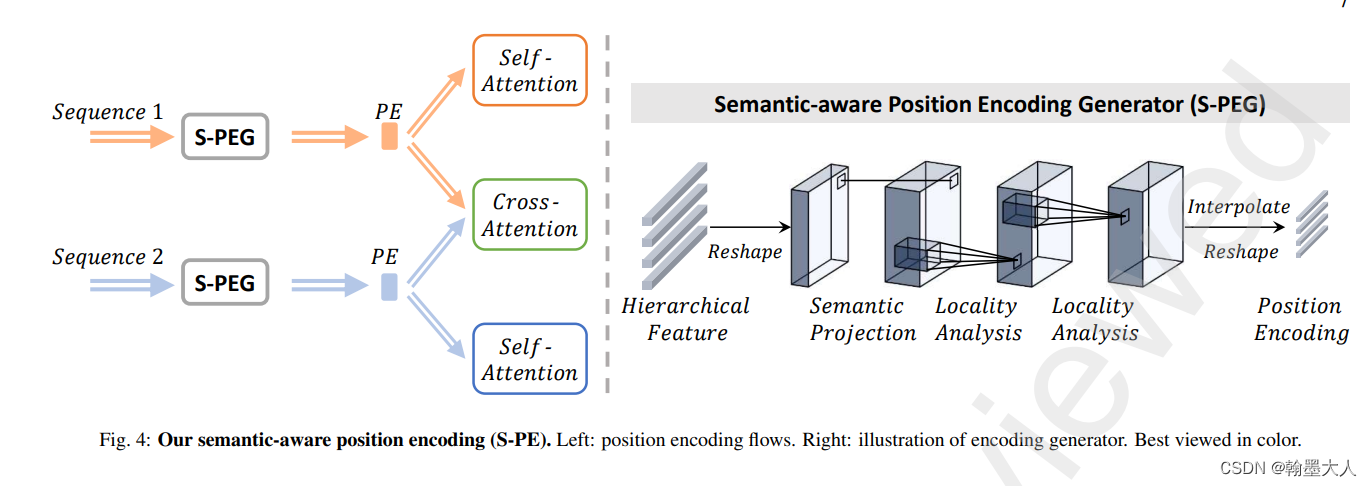
然后回到融合部分,输入master序列为(1,225,256),经过类似VIT线性投影操作,生成Q,K,V,和VIT一样是多头,那么假设有8个头,那么Q,K,V的维度分别为(1,8,225,32)。然后就是位置编码(1,225,256)经过reshape,即分为八个头,每个头维度为(1,225,32)。这样就可以和Q,V进行相加。至于为什么V不加位置编码,我也不晓得。难道是为了和后面保持一致?补充序列也一样。
后面的交叉注意力:和前面的基本一样,区别是:上下两个分支的Q和Q带的位置编码分别来自对方。因为他们两个分支的头一样,维度一样,只有模态不一样,所以进行相乘还是不难的,还有就是位置编码和前一个自注意力使用的是一样的,即一个来自stage1的位置编码全程使用。
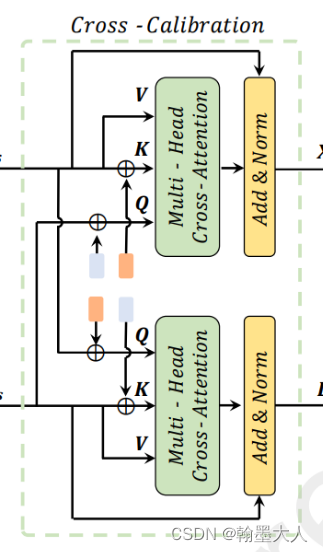
最后是深度引导,上一个模块的辅助分支的输出(1,225,256),仍然经过线性投影为多头。他进行qkv生成时候的linear就不需要x3了,,因为他只有一个输出。同理主分支也只需生成两个分支,embed_dim扩大两倍。最后在reshape为图片大小,即(1,256,15,15)。
decoder:八倍上采样。
自己写的代码,很粗糙,其中将swin transformer转换为了resnet34,这样结构简单了点,而且每一层的输出都是图片,避免了位置编码还要将序列转换为图片。都是一些很简单的函数,如有错误,欢迎指正。
import warnings
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
from torchsummary import summary
# from src.models.refine import Refine
from src.models.resnet import ResNet34
from src.models.context_modules import get_context_module
from src.models.resnet import BasicBlock, NonBottleneck1D
# from src.models.model_utils import ConvBNAct, Swish, Hswish
# conding=gb2312
def convt_bn_relu(ch_in, ch_out, kernel=3, stride=2, padding=1, output_padding=1,
bn=True, relu=True):
assert (kernel % 2) == 1, \
'only odd kernel is supported but kernel = {}'.format(kernel)
layers = []
layers.append(nn.ConvTranspose2d(ch_in, ch_out, kernel, stride, padding,
output_padding, bias=not bn))
if bn:
layers.append(nn.BatchNorm2d(ch_out))
if relu:
layers.append(nn.ReLU(inplace=True))
layers = nn.Sequential(*layers)
return layers
def conv_bn_relu(ch_in, ch_out, kernel, stride=1, padding=0, bn=True,relu=True):
assert (kernel % 2) == 1, \
'only odd kernel is supported but kernel = {}'.format(kernel)
layers = []
layers.append(nn.Conv2d(ch_in, ch_out, kernel, stride, padding,
bias=not bn))
if bn:
layers.append(nn.BatchNorm2d(ch_out))
if relu:
layers.append(nn.ReLU(inplace=True))
layers = nn.Sequential(*layers)
return layers
def drop_path(x, drop_prob: float = 0., training: bool = False):
if drop_prob == 0. or not training:
return x
keep_prob = 1 - drop_prob
shape = (x.shape[0],) + (1,) * (x.ndim - 1) # work with diff dim tensors, not just 2D ConvNets
random_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)
random_tensor.floor_() # binarize
output = x.div(keep_prob) * random_tensor
return output
class DropPath(nn.Module):
def __init__(self, drop_prob=None):
super(DropPath, self).__init__()
self.drop_prob = drop_prob
def forward(self, x):
return drop_path(x, self.drop_prob, self.training)
class Mlp(nn.Module):
"""
MLP as used in Vision Transformer, MLP-Mixer and related networks
"""
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class Spge(nn.Module):
def __init__(self,
in_channels,
):
super(Spge, self).__init__()
self.spge_rgb = nn.Sequential(
nn.Conv2d(in_channels, in_channels * 4, kernel_size=1, stride=1, padding=0),
conv_bn_relu(in_channels * 4, in_channels * 4, kernel=3, padding=1, bn=True, relu=True),
conv_bn_relu(in_channels * 4, in_channels * 4, kernel=3, padding=1, bn=True, relu=True)
)
self.spge_depth = nn.Sequential(
nn.Conv2d(in_channels, in_channels * 4, kernel_size=1, stride=1, padding=0),
conv_bn_relu(in_channels * 4, in_channels * 4, kernel=3, padding=1, bn=True, relu=True),
conv_bn_relu(in_channels * 4, in_channels * 4, kernel=3, padding=1, bn=True, relu=True)
)
def forward(self,rgb,depth): #(1,64,120,120)
_,_,h,w = rgb.size()
rgb_f = self.spge_rgb(rgb)#(1,256,120,120)
depth_f = self.spge_depth(depth)#(1,256,120,120)
rgb_f_1 = F.interpolate(rgb_f,size=(h//8,w//8),mode='nearest').flatten(2).permute(0,2,1)#(1,256,15,15)
depth_f_1 = F.interpolate(depth_f,size=(h//8,w//8),mode='nearest').flatten(2).permute(0,2,1)#(1,256,15,15)
return rgb_f_1 ,depth_f_1
class Attention(nn.Module):
def __init__(self,
dim, # 输入token的dim
num_heads=8,
qkv_bias=False,
qk_scale=None,
attn_drop_ratio=0.,
proj_drop_ratio=0.):
super(Attention, self).__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.pos = nn.Linear(dim, dim, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop_ratio)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop_ratio)
def forward(self, x ,pe):
# [batch_size, num_patches + 1, total_embed_dim]
B, N, C = x.shape #(1,225,256)
b, n, c = pe.shape#(1,225,256)
posenc = self.pos(pe).reshape(b, n, self.num_heads, c // self.num_heads).permute(0,2,1,3)#(1,8,225,32)
# qkv(): -> [batch_size, num_patches + 1, 3 * total_embed_dim]
# reshape: -> [batch_size, num_patches + 1, 3, num_heads, embed_dim_per_head]
# permute: -> [3, batch_size, num_heads, num_patches + 1, embed_dim_per_head]
qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)#(3,1,8,225,32)
# [batch_size, num_heads, num_patches + 1, embed_dim_per_head]
# q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
q = qkv[0] + posenc #(1,8,225,32)
k = qkv[1] + posenc #(1,8,225,32)
v = qkv[2] #(1,8,225,32)
# transpose: -> [batch_size, num_heads, embed_dim_per_head, num_patches + 1]
# @: multiply -> [batch_size, num_heads, num_patches + 1, num_patches + 1]
attn = (q @ k.transpose(-2, -1)) * self.scale#(1,8,225,225)
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
# @: multiply -> [batch_size, num_heads, num_patches + 1, embed_dim_per_head]
# transpose: -> [batch_size, num_patches + 1, num_heads, embed_dim_per_head]
# reshape: -> [batch_size, num_patches + 1, total_embed_dim]
x = (attn @ v).transpose(1, 2).reshape(B, N, C) #(1,225,256)
x = self.proj(x)
x = self.proj_drop(x)
return x
class Attention_c(nn.Module):
def __init__(self,
dim, # 输入token的dim
num_heads=8,
qkv_bias=False,
qk_scale=None,
attn_drop_ratio=0.,
proj_drop_ratio=0.):
super(Attention_c, self).__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.pos = nn.Linear(dim, dim, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop_ratio)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop_ratio)
def forward(self, x ,y, x_pos, y_pos): #(depth_s,rgb_s,depth_pe,rgb_pe)
B, N, C = x.shape #(1,225,256)
b, n, c = x_pos.shape#(1,225,256)
x_pos = self.pos(x_pos).reshape(b, n,self.num_heads, c // self.num_heads).permute(0,2,1,3)#(1,8,225,32)
y_pos = self.pos(y_pos).reshape(b, n,self.num_heads, c // self.num_heads).permute(0,2,1,3)#(1,8,225,32)
qkv_x = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)#(3,1,8,225,32)
qkv_y = self.qkv(y).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)#(3,1,8,225,32)
q = qkv_y[0] + y_pos #(1,8,225,32)
k = qkv_x[1] + x_pos #(1,8,225,32)
v = qkv_x[2]#(1,8,225,32)
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
class Attention_g(nn.Module):
def __init__(self,
dim, # 输入token的dim
num_heads=8,
qkv_bias=False,
qk_scale=None,
attn_drop_ratio=0.,
proj_drop_ratio=0.):
super(Attention_g, self).__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.qkv_x = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.qkv_y = nn.Linear(dim, dim,bias=qkv_bias)
self.pos = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop_ratio)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop_ratio)
def forward(self, x ,y, x_pos, y_pos):
B, N, C = x.shape #(1,225,256)
b, n, c = x_pos.shape
x_pos = self.pos(x_pos).reshape(b, n, 3, self.num_heads, c // self.num_heads).permute(2, 0, 3, 1, 4)
y_pos = self.pos(y_pos).reshape(b, n, 3, self.num_heads, c // self.num_heads).permute(2, 0, 3, 1, 4)
qkv_x = self.qkv_x(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
qkv_y = self.qkv_y(y).reshape(B, N, self.num_heads, C // self.num_heads).permute(0,2,1,3)
q = qkv_y+ y_pos
k = qkv_x[1] + x_pos
v = qkv_x[2]
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
class Block_s(nn.Module):
def __init__(self,
dim=256,
num_heads=8,
qkv_bias=False,
qk_scale=None,
drop_ratio=0.,
attn_drop_ratio=0.,
drop_path_ratio=0.,
norm_layer=nn.LayerNorm):
super(Block_s, self).__init__()
self.norm1 = norm_layer(dim)
self.attn = Attention(dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale,
attn_drop_ratio=attn_drop_ratio, proj_drop_ratio=drop_ratio)
# NOTE: drop path for stochastic depth, we shall see if this is better than dropout here
self.drop_path = DropPath(drop_path_ratio) if drop_path_ratio > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
def forward(self, x,rgb_pos):
x = x + self.drop_path(self.attn(self.norm1(x),rgb_pos)) #(1,225,256)
return x
class Block_c(nn.Module):
def __init__(self,
dim,
num_heads,
qkv_bias=False,
qk_scale=None,
drop_ratio=0.,
attn_drop_ratio=0.,
drop_path_ratio=0.,
norm_layer=nn.LayerNorm):
super(Block_c, self).__init__()
self.norm1 = norm_layer(dim)
self.attn_c = Attention_c(dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale,
attn_drop_ratio=attn_drop_ratio, proj_drop_ratio=drop_ratio)
self.drop_path = DropPath(drop_path_ratio) if drop_path_ratio > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
def forward(self, x,y,rgb_pos,depth_pos):
x = x + self.drop_path(self.attn_c(self.norm1(x),self.norm2(y),rgb_pos,depth_pos))#(1,225,256)
return x
class Block_g(nn.Module):
def __init__(self,
dim,
num_heads,
qkv_bias=False,
qk_scale=None,
drop_ratio=0.,
attn_drop_ratio=0.,
drop_path_ratio=0.,
norm_layer=nn.LayerNorm):
super(Block_g, self).__init__()
self.norm1 = norm_layer(dim)
self.attn_c = Attention_c(dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale,
attn_drop_ratio=attn_drop_ratio, proj_drop_ratio=drop_ratio)
self.drop_path = DropPath(drop_path_ratio) if drop_path_ratio > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
def forward(self, x,y,rgb_pos,depth_pos):
x = x + self.drop_path(self.attn_c(self.norm1(x),self.norm2(y),rgb_pos,depth_pos))
return x
class Transformer_fusion(nn.Module):
def __init__(self,
num_heads=8,
qkv_bias = False,
embed_dim =256,
qk_scale = None,
drop_ratio = 0.1,
attn_drop_ratio =0.,
drop_path_ratio =0.,
norm_layer = nn.LayerNorm,
):
super(Transformer_fusion,self).__init__()
self.rgb_out = Block_s(dim=embed_dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale,
drop_ratio=drop_ratio, attn_drop_ratio=attn_drop_ratio, drop_path_ratio=drop_path_ratio,
norm_layer=norm_layer)
self.depth_out = Block_s(dim=embed_dim, num_heads=num_heads,qkv_bias=qkv_bias,
qk_scale=qk_scale,drop_ratio=drop_ratio, attn_drop_ratio=attn_drop_ratio, drop_path_ratio=drop_path_ratio,
norm_layer=norm_layer)
self.rgb_c = Block_c(dim=embed_dim, num_heads=num_heads, qkv_bias=qkv_bias,
qk_scale=qk_scale,drop_ratio=drop_ratio, attn_drop_ratio=attn_drop_ratio, drop_path_ratio=drop_path_ratio,
norm_layer=norm_layer)
self.depth_c = Block_c(dim=embed_dim, num_heads=num_heads, qkv_bias=qkv_bias,
qk_scale=qk_scale, drop_ratio=drop_ratio, attn_drop_ratio=attn_drop_ratio,
drop_path_ratio=drop_path_ratio,
norm_layer=norm_layer)
self.rgb_g = Block_g(dim=embed_dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale,
drop_ratio=drop_ratio, attn_drop_ratio=attn_drop_ratio, drop_path_ratio=drop_path_ratio,
norm_layer=norm_layer)
self.norm_rgb = norm_layer(embed_dim)
self.norm_depth = norm_layer(embed_dim)
def forward(self,rgb,depth,rgb_pe,depth_pe):
b,n,c = rgb.shape #(1,225,256)
rgb_s = self.rgb_out (rgb,rgb_pe)#(1,225,256)
depth_s = self.depth_out(depth,depth_pe)#(1,225,256)
rgb_c = self.rgb_c (rgb_s,depth_s,rgb_pe,depth_pe)#(1,225,256)
depth_c = self.depth_c (depth_s,rgb_s,depth_pe,rgb_pe)#(1,225,256)
rgb_g = self.rgb_g(rgb_c,depth_c,rgb_pe,depth_pe)#(1,225,256)
out = rgb_g.reshape(b,c,int(np.sqrt(n)),int(np.sqrt(n)))#(1,256,15,15)
return out
class DeepLabV3Plus(nn.Module):
def __init__(self, in_channels=[64, 128, 256, 512], num_classes=40, norm_layer=nn.BatchNorm2d):
super(DeepLabV3Plus, self).__init__()
self.num_classes = num_classes
self.aspp = ASPP(in_channels=in_channels[2], atrous_rates=[6, 12, 18], norm_layer=norm_layer)
self.low_level = nn.Sequential(
nn.Conv2d(in_channels[0], 256, kernel_size=3, stride=1, padding=1),
norm_layer(256),
nn.ReLU(inplace=True)
)
self.block = nn.Sequential(
nn.Conv2d(512, 256, kernel_size=3, stride=1, padding=1),
norm_layer(256),
nn.ReLU(inplace=True),
convt_bn_relu(256,128,kernel=3,stride=4,padding=1,output_padding=3),
nn.Dropout(0.1),
nn.Conv2d(128, num_classes, 1))
def forward(self, c1,c4): #(1,64,120,120)/(1,512,15,15)
c1 = self.low_level(c1)#(1,256,120,120)
c4 = self.aspp(c4)#(1,256,15,15)
c4 = F.interpolate(c4, c1.size()[2:], mode='bilinear', align_corners=True)#(1,256,120,120)
output = self.block(torch.cat([c4, c1], dim=1)) #(1,40,480,480)
return output
class ASPPConv(nn.Module):
def __init__(self, in_channels, out_channels, atrous_rate, norm_layer):
super(ASPPConv, self).__init__()
self.block = nn.Sequential(
nn.Conv2d(in_channels, out_channels, 3, padding=atrous_rate, dilation=atrous_rate, bias=False),
norm_layer(out_channels),
nn.ReLU(True)
)
def forward(self, x):
return self.block(x)
class AsppPooling(nn.Module):
def __init__(self, in_channels, out_channels, norm_layer):
super(AsppPooling, self).__init__()
self.gap = nn.Sequential(
nn.AdaptiveAvgPool2d(1),
nn.Conv2d(in_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.ReLU(True)
)
def forward(self, x):
size = x.size()[2:]
pool = self.gap(x)
out = F.interpolate(pool, size, mode='bilinear', align_corners=True)
return out
class ASPP(nn.Module):
def __init__(self, in_channels, atrous_rates, norm_layer):
super(ASPP, self).__init__()
out_channels = 256
self.b0 = nn.Sequential(
nn.Conv2d(in_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.ReLU(True)
)
rate1, rate2, rate3 = tuple(atrous_rates)
self.b1 = ASPPConv(in_channels, out_channels, rate1, norm_layer)
self.b2 = ASPPConv(in_channels, out_channels, rate2, norm_layer)
self.b3 = ASPPConv(in_channels, out_channels, rate3, norm_layer)
self.b4 = AsppPooling(in_channels, out_channels, norm_layer=norm_layer)
self.project = nn.Sequential(
nn.Conv2d(5 * out_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.ReLU(True),
nn.Dropout(0.5)
)
def forward(self, x):
feat1 = self.b0(x)
feat2 = self.b1(x)
feat3 = self.b2(x)
feat4 = self.b3(x)
feat5 = self.b4(x)
x = torch.cat((feat1, feat2, feat3, feat4, feat5), dim=1)
x = self.project(x) #(1,256,15,15)
return x
class ESANet(nn.Module):
def __init__(self,
height=480,
width=480,
num_classes=40,
encoder_rgb='resnet34',
encoder_depth='resnet34',
encoder_block='BasicBlock',
pretrained_on_imagenet=True,
pretrained_dir='',
activation='relu',
):
super(ESANet, self).__init__()
in_channels = 64
# set activation function
if activation.lower() == 'relu':
self.activation = nn.ReLU(inplace=True)
else:
raise NotImplementedError(
'Only relu, swish and hswish as activation function are '
'supported so far. Got {}'.format(activation))
if encoder_rgb == 'resnet50' or encoder_depth == 'resnet50':
warnings.warn('Parameter encoder_block is ignored for ResNet50. '
'ResNet50 always uses Bottleneck')
# rgb encoder
if encoder_rgb == 'resnet34':
self.encoder_rgb = ResNet34(
block=encoder_block,
pretrained_on_imagenet=pretrained_on_imagenet,
pretrained_dir=pretrained_dir,
activation=self.activation)
else:
raise NotImplementedError(
'Only ResNets are supported for '
'encoder_rgb. Got {}'.format(encoder_rgb))
# depth encoder
if encoder_depth == 'resnet34':
self.encoder_depth = ResNet34(
block=encoder_block,
pretrained_on_imagenet=pretrained_on_imagenet,
pretrained_dir=pretrained_dir,
activation=self.activation,
input_channels=1)
else:
raise NotImplementedError(
'Only ResNets are supported for '
'encoder_depth. Got {}'.format(encoder_rgb))
self.conv1_rgb = conv_bn_relu(4, 64, kernel=3, stride=2, padding=1,bn=True)
self.rgbconv = conv_bn_relu(in_channels*8,in_channels*4,kernel=3,stride=1,padding=1,bn=True)
self.depthconv = conv_bn_relu(in_channels*8,in_channels*4,kernel=3,stride=1,padding=1,bn=True)
self.spge = Spge(in_channels)
self.transfusion = Transformer_fusion(num_heads=8,
qkv_bias = False,
embed_dim =256,
qk_scale = None,
drop_ratio = 0.1,
attn_drop_ratio =0.,
drop_path_ratio =0.,
norm_layer = nn.LayerNorm,)
self.decoder = DeepLabV3Plus(
in_channels=[64, 128, 256, 512],
num_classes=40,
norm_layer=nn.BatchNorm2d
)
def forward(self, rgb, depth):#rgb, depth
rgb_0 = torch.cat([rgb,depth],dim=1) #(1,4,480,480)
rgb1 = self.conv1_rgb(rgb_0)#(1,64,240,240)
depth1 = self.encoder_depth.forward_first_conv(depth) # (1,64,240,240)
fuse1_1 = F.max_pool2d(rgb1, kernel_size=3, stride=2, padding=1)#(1,64,120,120)
fuse2_2 = F.max_pool2d(depth1, kernel_size=3, stride=2, padding=1)#(1,64,120,120)
# block 2
rgb2 = self.encoder_rgb.forward_layer1(fuse1_1) # (1,64,120,120)
depth2 = self.encoder_depth.forward_layer1(fuse2_2) # (1,64,120,120)
# block 2
rgb3 = self.encoder_rgb.forward_layer2(rgb2) # (1,128,60,60)
depth3 = self.encoder_depth.forward_layer2(depth2) # (1,128,60,60)
# block 3
rgb4 = self.encoder_rgb.forward_layer3(rgb3) # (1,256,30,30)
depth4 = self.encoder_depth.forward_layer3(depth3) # (1,256,30,30)
# block 4
rgb5 = self.encoder_rgb.forward_layer4(rgb4) # (1,512,15,15)
depth5 = self.encoder_depth.forward_layer4(depth4) # (1,512,15,15)
rgb6 = self.rgbconv(rgb5).flatten(2).permute(0,2,1) #(1,256,15,15)--->(1,225,256)
depth6 = self.depthconv(depth5).flatten(2).permute(0,2,1)#(1,256,15,15)--->(1,225,256)
# position encoding
rgb_pe ,depth_pe = self.spge(rgb2,depth2)
# transformer fusion
out = self.transfusion(rgb6,depth6,rgb_pe , depth_pe)#(1,256,15,15)
# decoder
final_out = self.decoder(rgb2,out) #(1,40,480,480)
return final_out
def main():
height = 480,
width = 480,
# --------------------------------实例化ESAnet-------------------------
model = ESANet() # (传入参数)
model.eval()
rgb_image = torch.randn(1, 3, 480, 480)
depth_image = torch.randn(1, 1, 480, 480)
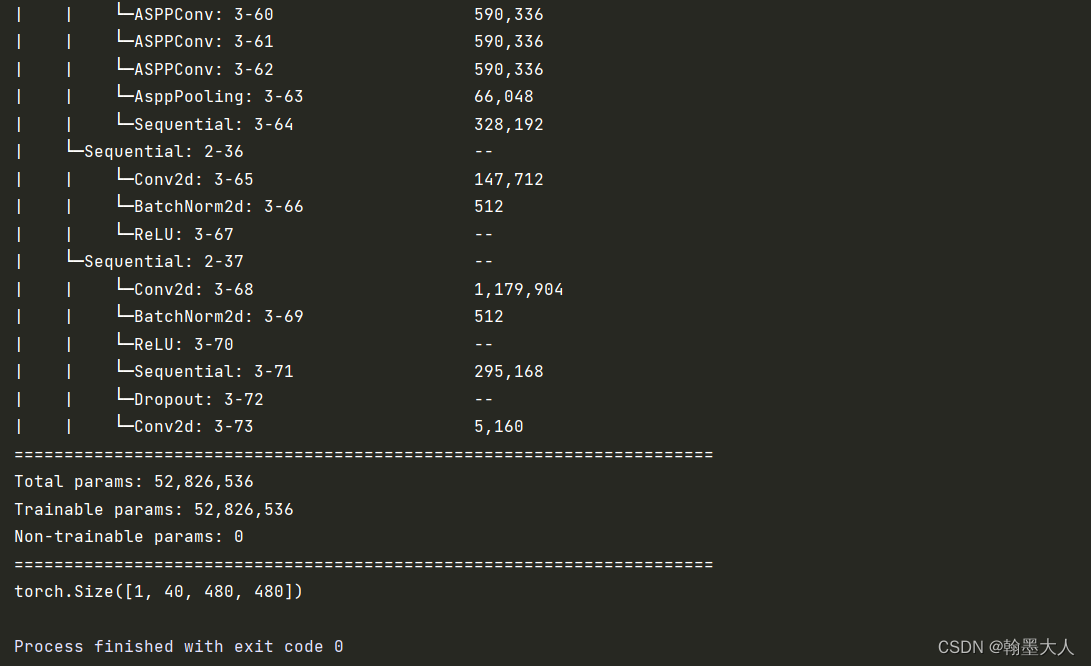
summary(model, input_size=[(3, 480, 480), (1, 480, 480)], device='cpu')
with torch.no_grad():
output = model(rgb_image, depth_image)
print(output.shape)
if __name__ == '__main__':
main()






![[附源码]Python计算机毕业设计二手书交易系统](https://img-blog.csdnimg.cn/43d2c962d2f64f8784eac886445a7323.png)