【MATLAB代码】基于最大相关熵准则(MCC)的三维鲁棒卡尔曼滤波算法(MCC-KF),附源代码|订阅专栏后可直接查看
news2026/4/16 3:16:41
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2407157.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
代码规范和架构【立芯理论一】(2025.06.08)
1、代码规范的目标
代码简洁精炼、美观,可持续性好高效率高复用,可移植性好高内聚,低耦合没有冗余规范性,代码有规可循,可以看出自己当时的思考过程特殊排版,特殊语法,特殊指令,必须…

解读《网络安全法》最新修订,把握网络安全新趋势
《网络安全法》自2017年施行以来,在维护网络空间安全方面发挥了重要作用。但随着网络环境的日益复杂,网络攻击、数据泄露等事件频发,现行法律已难以完全适应新的风险挑战。
2025年3月28日,国家网信办会同相关部门起草了《网络安全…
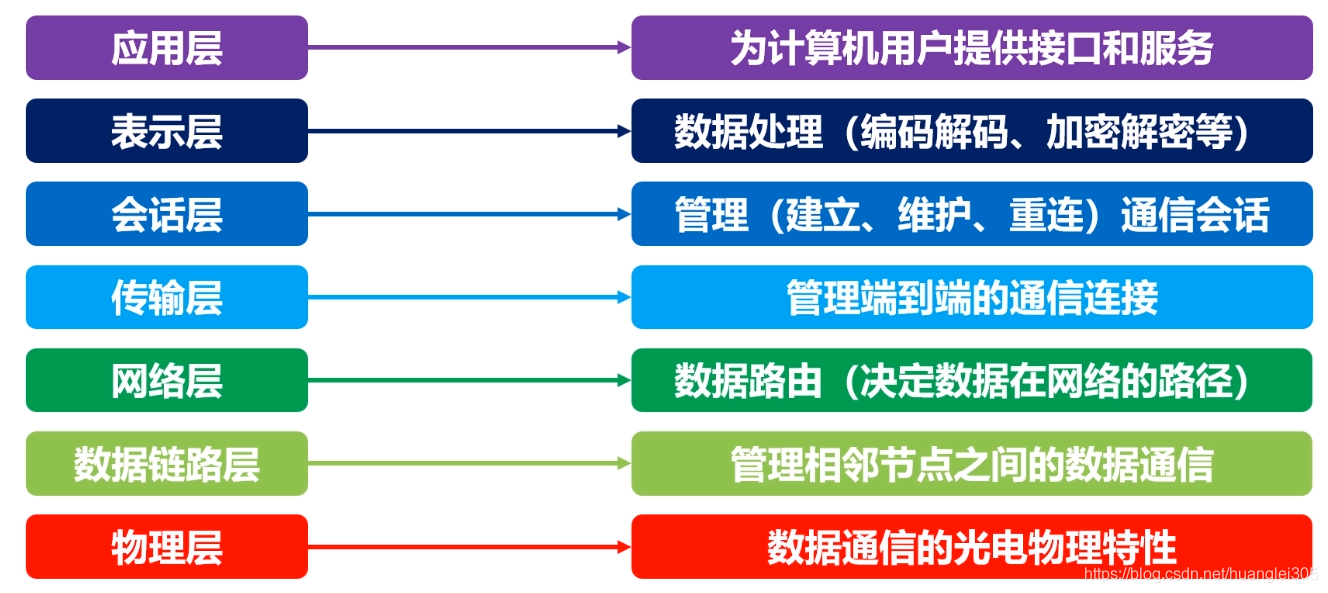
计算机基础知识解析:从应用到架构的全面拆解
目录 前言
1、 计算机的应用领域:无处不在的数字助手
2、 计算机的进化史:从算盘到量子计算
3、计算机的分类:不止 “台式机和笔记本”
4、计算机的组件:硬件与软件的协同
4.1 硬件:五大核心部件
4.2 软件&#…

C# 表达式和运算符(求值顺序)
求值顺序
表达式可以由许多嵌套的子表达式构成。子表达式的求值顺序可以使表达式的最终值发生 变化。 例如,已知表达式3*52,依照子表达式的求值顺序,有两种可能的结果,如图9-3所示。
如果乘法先执行,结果是17。如果5…
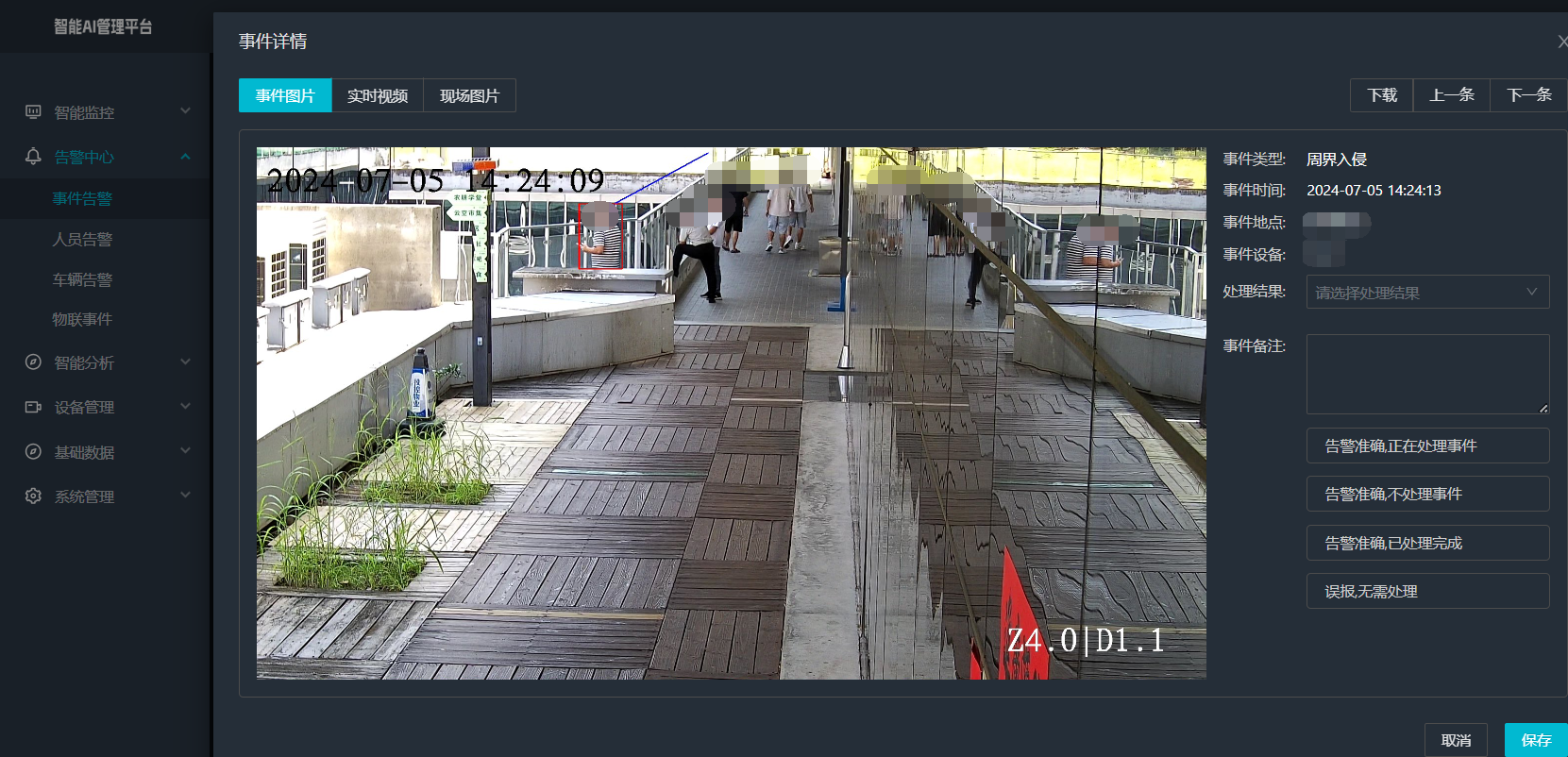
打手机检测算法AI智能分析网关V4守护公共/工业/医疗等多场景安全应用
一、方案背景
在现代生产与生活场景中,如工厂高危作业区、医院手术室、公共场景等,人员违规打手机的行为潜藏着巨大风险。传统依靠人工巡查的监管方式,存在效率低、覆盖面不足、判断主观性强等问题,难以满足对人员打手机行为精…
![[大语言模型]在个人电脑上部署ollama 并进行管理,最后配置AI程序开发助手.](https://i-blog.csdnimg.cn/direct/fabeb35cd62d4556a47999998f6a8b97.png)
[大语言模型]在个人电脑上部署ollama 并进行管理,最后配置AI程序开发助手.
ollama官网:
下载
https://ollama.com/
安装 查看可以使用的模型
https://ollama.com/search
例如
https://ollama.com/library/deepseek-r1/tags
# deepseek-r1:7bollama pull deepseek-r1:7b改token数量为409622 16384
ollama命令说明
ollama serve #:…
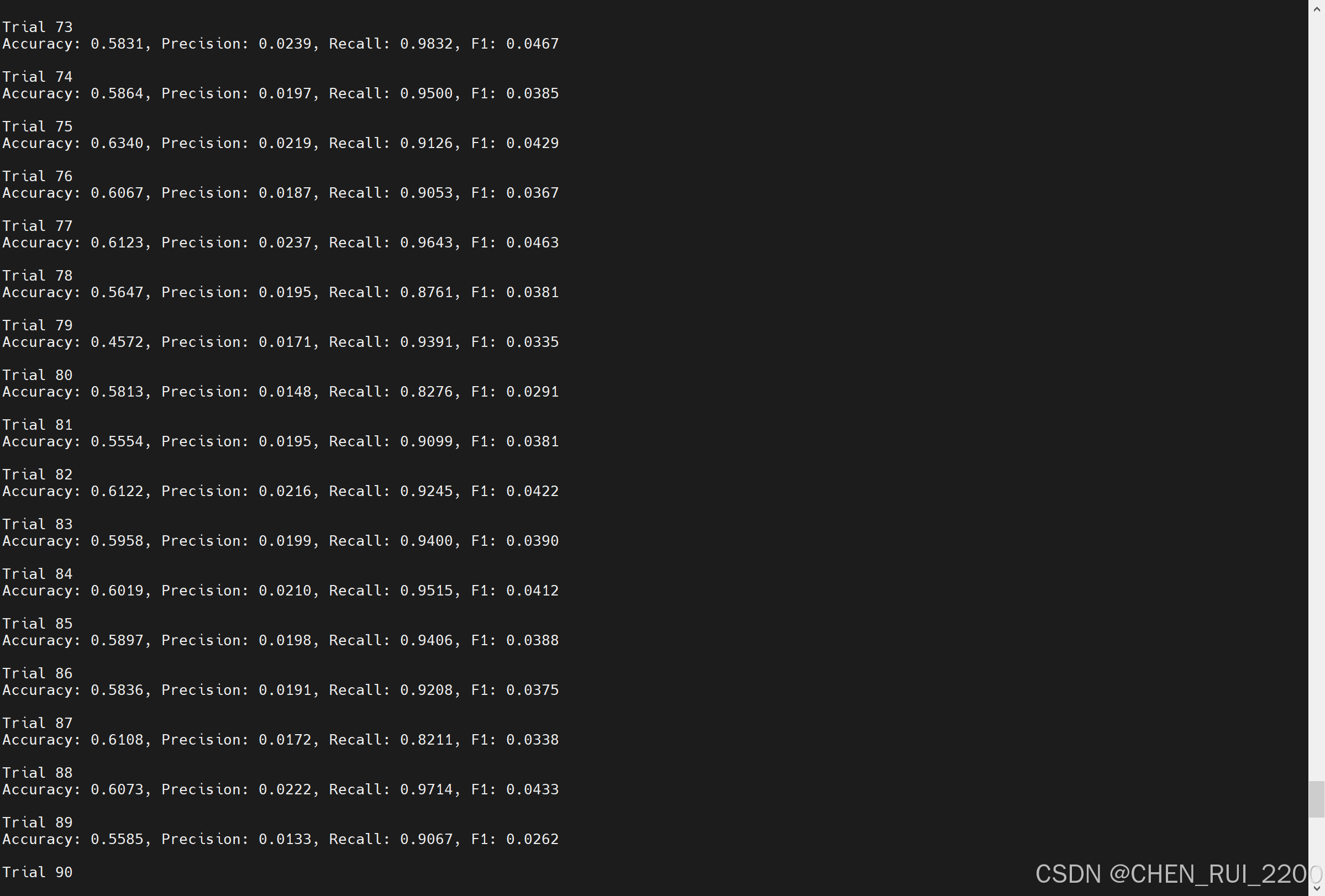
逻辑回归暴力训练预测金融欺诈
简述
「使用逻辑回归暴力预测金融欺诈,并不断增加特征维度持续测试」的做法,体现了一种逐步建模与迭代验证的实验思路,在金融欺诈检测中非常有价值,本文作为一篇回顾性记录了早年间公司给某行做反欺诈预测用到的技术和思路。百度…
FFmpeg:Windows系统小白安装及其使用
一、安装
1.访问官网
Download FFmpeg
2.点击版本目录 3.选择版本点击安装
注意这里选择的是【release buids】,注意左上角标题 例如我安装在目录
F:\FFmpeg
4.解压 5.添加环境变量
把你解压后的bin目录(即exe所在文件夹)加入系统变量…
![[ACTF2020 新生赛]Include 1(php://filter伪协议)](https://i-blog.csdnimg.cn/direct/09cb532228734a828e63036f3fbd9caf.png)
[ACTF2020 新生赛]Include 1(php://filter伪协议)
题目 做法
启动靶机,点进去
点进去
查看URL,有
?fileflag.php说明存在文件包含,原理是php://filter 协议
当它与包含函数结合时,php://filter流会被当作php文件执行。 用php://filter加编码,能让PHP把文件内容…
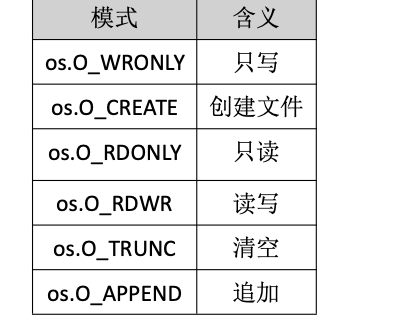
Golang——9、反射和文件操作
反射和文件操作 1、反射1.1、reflect.TypeOf()获取任意值的类型对象1.2、reflect.ValueOf()1.3、结构体反射 2、文件操作2.1、os.Open()打开文件2.2、方式一:使用Read()读取文件2.3、方式二:bufio读取文件2.4、方式三:os.ReadFile读取2.5、写…
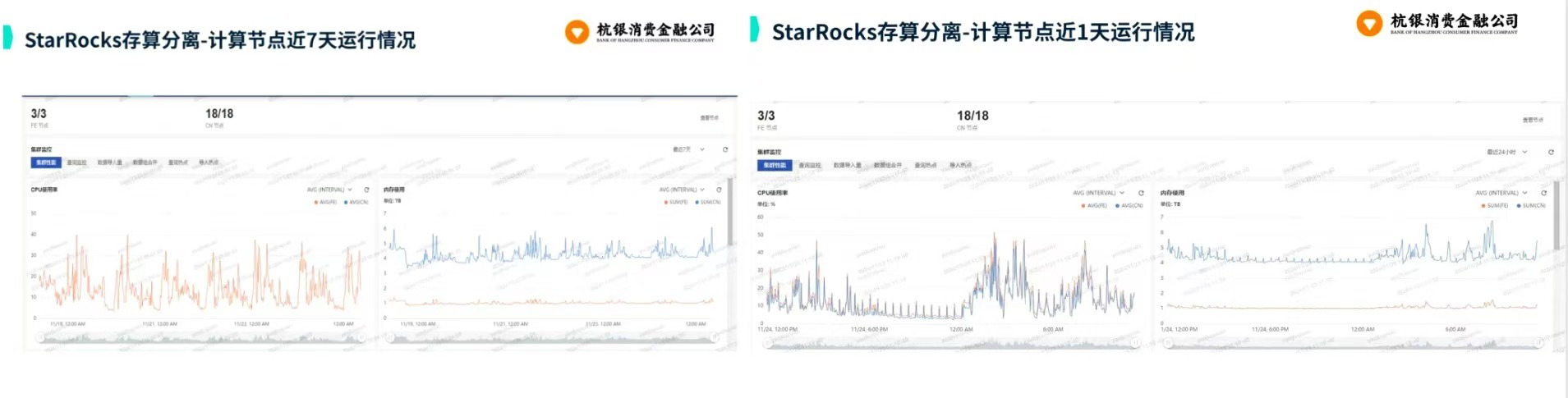
从 GreenPlum 到镜舟数据库:杭银消费金融湖仓一体转型实践
作者:吴岐诗,杭银消费金融大数据应用开发工程师
本文整理自杭银消费金融大数据应用开发工程师在StarRocks Summit Asia 2024的分享 引言:融合数据湖与数仓的创新之路
在数字金融时代,数据已成为金融机构的核心竞争力。杭银消费金…
R 语言科研绘图第 55 期 --- 网络图-聚类
在发表科研论文的过程中,科研绘图是必不可少的,一张好看的图形会是文章很大的加分项。
为了便于使用,本系列文章介绍的所有绘图都已收录到了 sciRplot 项目中,获取方式:
R 语言科研绘图模板 --- sciRplothttps://mp.…
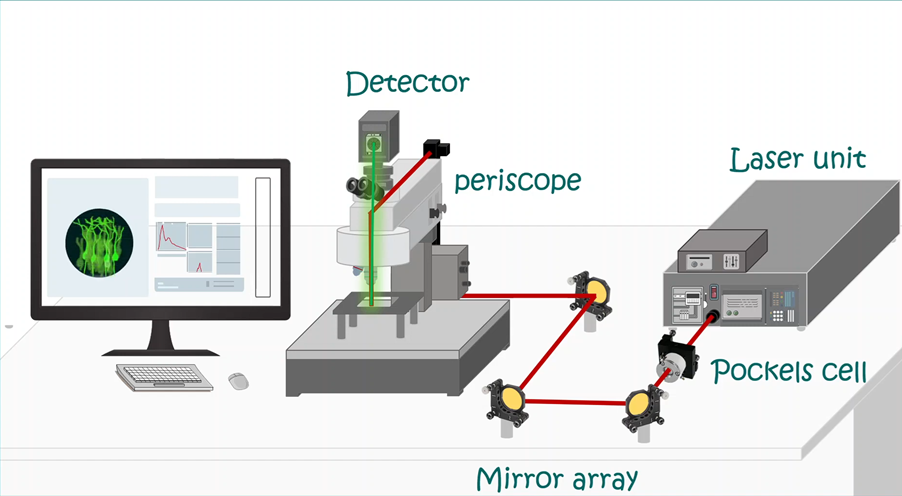
LabVIEW双光子成像系统技术
双光子成像技术的核心特性
双光子成像通过双低能量光子协同激发机制,展现出显著的技术优势: 深层组织穿透能力:适用于活体组织深度成像 高分辨率观测性能:满足微观结构的精细研究需求 低光毒性特点:减少对样本的损伤…
【 java 虚拟机知识 第一篇 】
目录 1.内存模型
1.1.JVM内存模型的介绍
1.2.堆和栈的区别
1.3.栈的存储细节
1.4.堆的部分
1.5.程序计数器的作用
1.6.方法区的内容
1.7.字符串池
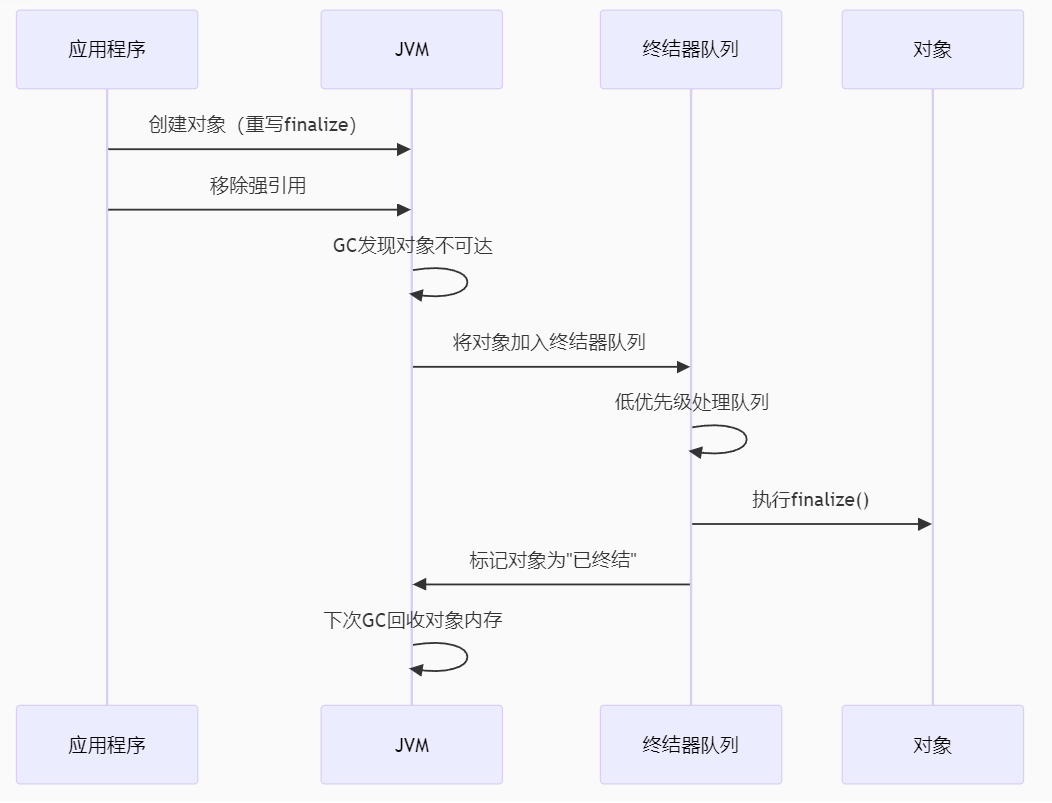
1.8.引用类型
1.9.内存泄漏与内存溢出
1.10.会出现内存溢出的结构 1.内存模型
1.1.JVM内存模型的介绍
内存模型主要分…
day36-多路IO复用
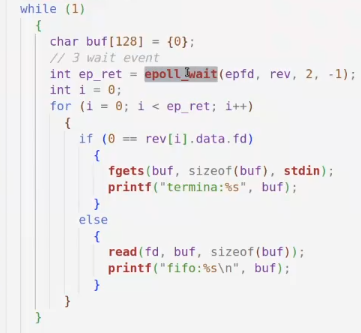
一、基本概念
(服务器多客户端模型) 定义:单线程或单进程同时监测若干个文件描述符是否可以执行IO操作的能力 作用:应用程序通常需要处理来自多条事件流中的事件,比如我现在用的电脑,需要同时处理键盘鼠标…
群晖NAS如何在虚拟机创建飞牛NAS
套件中心下载安装Virtual Machine Manager
创建虚拟机 配置虚拟机 飞牛官网下载
https://iso.liveupdate.fnnas.com/x86_64/trim/fnos-0.9.2-863.iso 群晖NAS如何在虚拟机创建飞牛NAS - 个人信息分享

android13 app的触摸问题定位分析流程
一、知识点 一般来说,触摸问题都是app层面出问题,我们可以在ViewRootImpl.java添加log的方式定位;如果是touchableRegion的计算问题,就会相对比较麻烦了,需要通过adb shell dumpsys input > input.log指令,且通过打印堆栈的方式,逐步定位问题,并找到修改方案。
问题…
基于PHP的连锁酒店管理系统
有需要请加文章底部Q哦 可远程调试 基于PHP的连锁酒店管理系统 一 介绍
连锁酒店管理系统基于原生PHP开发,数据库mysql,前端bootstrap。系统角色分为用户和管理员。 技术栈 phpmysqlbootstrapphpstudyvscode
二 功能
用户 1 注册/登录/注销 2 个人中…
基于Java+VUE+MariaDB实现(Web)仿小米商城
仿小米商城
环境安装
nodejs
maven
JDK11
运行
mvn clean install -DskipTestscd adminmvn spring-boot:runcd ../webmvn spring-boot:runcd ../xiaomi-store-admin-vuenpm installnpm run servecd ../xiaomi-store-vuenpm installnpm run serve
注意:运行前…