研究背景:日常生活中,健康人依靠手完成对物体的操作。对于手部截肢患者,手部的缺失导致他们难以有效地操作物体,进而影响正常的日常生活。拥有一个能够实现拟人地自然抓取多种日常物体的五指动力假手是手部截肢患者的夙愿,有助于提高患者自尊心和生活的信心。传统假肢手多依赖脑机接口(BCI)或肌电信号(EMG)控制,但存在手势适应性差、意图识别精度低等问题。尽管视觉系统能增强物体感知,却难以实现动态拟人化抓握动作。截肢者在使用现有假肢时,常面临操作不自然、功能受限的困扰,不仅影响日常效率,更可能削弱其心理自信。为此,该团队提出了一种创新解决方案——基于视觉系统的动力假手,通过动态手势建模与智能意图预测,显著提升了假肢的拟人化水平与实用性。研究内容:该研究由哈尔滨工业大学(深圳)、中国科学院沈阳自动化研究所、南方科技大学等团队联合完成,首次实现了假肢手在抓取过程中抓取动作的拟人化。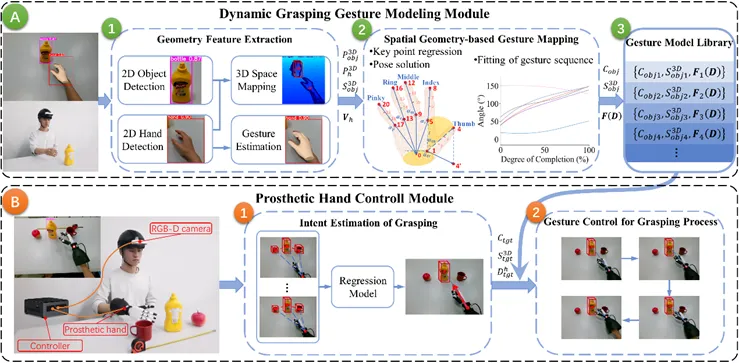
如图1所示,智能假手系统架构展示了视觉驱动假手系统的两大核心模块,分别为抓取手势动态建模功能模块和假肢手控制功能模块。动态抓握手势建模模块(A部分):通过头戴摄像头捕捉健康人手部抓握物体的视觉数据,依次完成物体3D重建、手势关键点提取,并构建手物距离与关节角度的多项式函数,最终形成可扩展的手势模型库。假手控制模块(B部分):结合实时视觉数据,利用运动轨迹回归算法预测用户抓取目标,从模型库调用对应手势函数,驱动假手实现拟人化抓握。该设计实现了“视觉感知-意图预测-动态控制”的全自动化闭环。
图1智能假肢手系统概述。(A) 上半部分为动态抓取手势建模模块工作流程。 (B) 下半部分为假肢手控制模块工作流程。该团队以右手假肢为例进行研究。动态抓取手势建模模块的数据来源于人右手抓取多种物体。图2详细呈现空间几何手势映射方法(SG-GM)的流程。物体感知(a部分):采用YOLOv5检测目标,结合深度信息重建物体3D点云,并通过背景剔除与聚类分割提取精确几何特征。手势解析(b部分):改进的SRHandNet模型定位手部区域,结合IntagHand算法估计21个关节角度,生成MANO手部网格模型。动态映射(c部分):将手-物距离序列与关节角度拟合为多项式函数,构建手势模型库,确保假手从接近到抓握全程动作连贯拟人。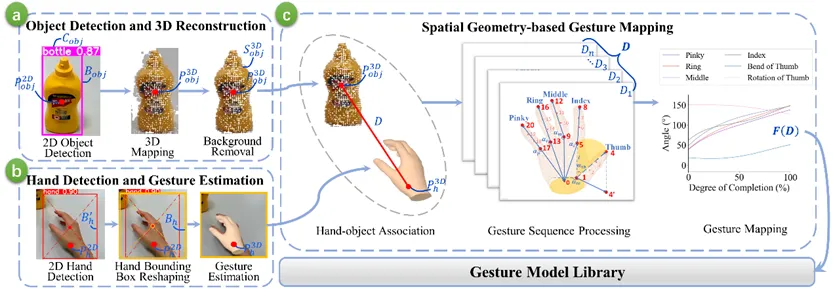
图2基于空间几何的手势映射方法(SG-GM)流程。人体抓取物体过程中,腕部在空间的运动曲线通常可近似为一条直线。基于该原理,我们提出了MTR-GIE算法。我们将采集
个假肢手腕部的位置。根据这些腕部位置回归一条空间直线,用于预测假肢手的运动方向,进而实现抓取意图的估计,图3揭示了多物体环境下意图估计算法(MTR-GIE)的数学内核:轨迹回归:基于假肢手腕的连续空间坐标(红点),通过最小二乘法拟合出预测运动直线(绿蓝平面交线)。空间分割:构建橙色空间分割平面,筛选位于预测轨迹左侧且距离最近的物体作为抓取目标。该算法仅依赖头戴摄像头数据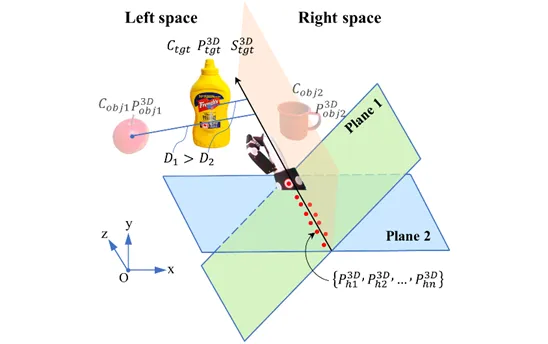
图3 基于运动轨迹回归的抓取意图估计算法(MTR-GIE)估计抓取意图的示意图。总结与展望本文提出的具有视觉的动力假肢系统具备对自然手势构建模型的能力,针对新的物体能够快速的构建手势。同时,该假肢系统实现了拟人化的手势控制,能够适应多物体抓取场景。此外,本文提出的基于运动轨迹回归的抓取意图估计算法在假肢运动过程中快速确认抓取目标,大幅度降低了对抓取时间和自然手势控制的影响。系统在单物体环境下抓取成功率为95.43%,抓取时间为3.07±0.41s,接近于人手正常抓取物体所用时间。假肢手与人手抓取动作的相似度为0.911。在多物体环境下意图估计准确率为94.35%,抓取成功率为88.75%。本文提出的方法能够使假肢手快速地实现面向新物体的、拟人的抓取,为探索假肢手控制提供了新的解决途径和思路。Yansong Xu, Xiaohui Wang, Junlin Li, Xiaoqian Zhang, Feng Li, Qing Gao, Chenglong Fu, and Yuquan Leng, “A Powered Prosthetic Hand with Vision System for Enhancing the Anthropopathic Grasp,” in IEEE Transactions on Neural Systems and Rehabilitation Engineering, doi: 10.1109/TNSRE.2025.3567392.文章链接:https://ieeexplore.ieee.org/document/10988884
冷雨泉教授团队:新型视觉驱动智能假肢手,拟人化抓握技术突破,助力截肢者重获生活自信
news2026/4/16 8:19:03
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2400931.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
pikachu靶场通关笔记14 XSS关卡10-XSS之js输出(五种方法渗透)
目录
一、源码分析
1、进入靶场
2、代码审计
二、渗透实战
1、根据提示输入tmac
2、XSS探测
3、注入Payload1
4、注入Payload2
5、注入Payload3
6、注入Payload4
7、注入Payload5 本系列为通过《pikachu靶场通关笔记》的XSS关卡(共10关)渗透集合&#x…
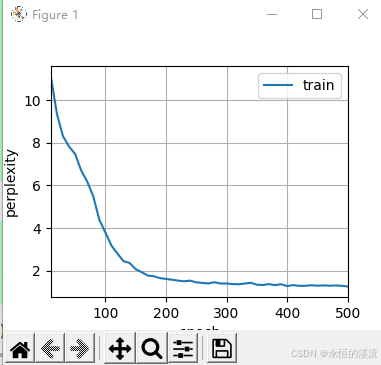
李沐-动手学深度学习:RNN
1.RNN从零开始实现
import math
import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l#8.3.4节
#batch_size:每个小批量中子序列样本的数目,num_steps:每个子序列中预定义的时间步数
#loa…
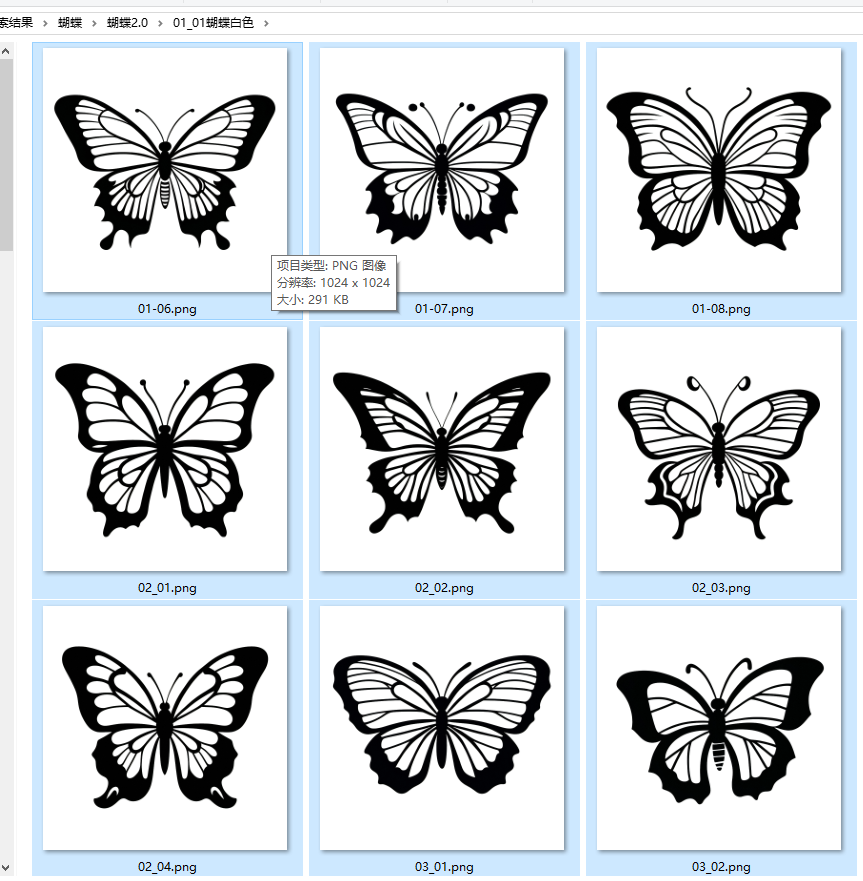
【教学类-36-10】20250531蝴蝶图案描边,最适合大小(一页1图1图、2图图案不同、2图图案相同对称)
背景说明:
之前做了动物头像扇子(描边20),并制作成一页一套图案对称两张
【教学类-36-09】20250526动物头像扇子的描边(通义万相)对称图40张,根据图片长宽,自动旋转图片,最大化图片-CSDN博客文章浏览阅读1k次,点赞37次,收藏6次。【教学类-36-09】20250526动物头像…
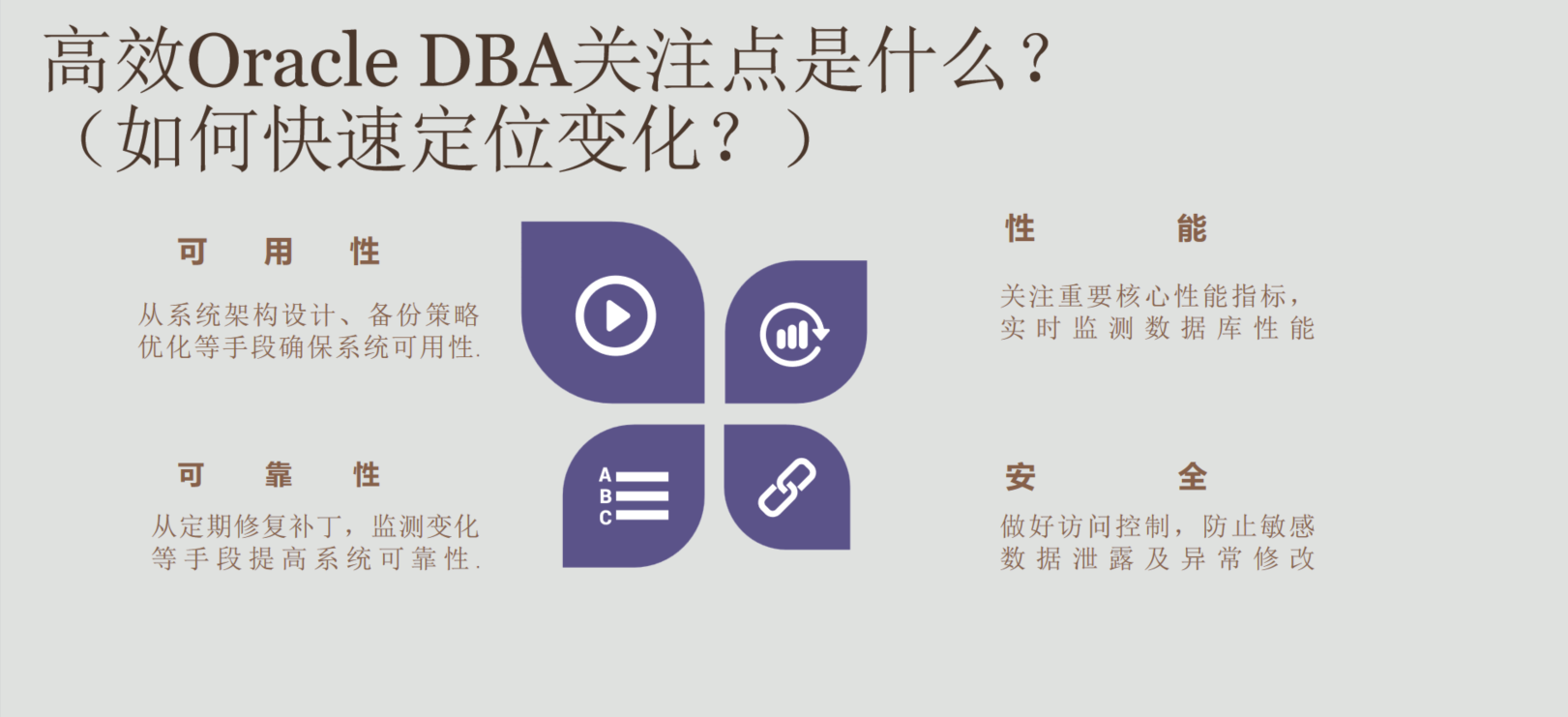
高效DBA的日常运维主题沙龙
2024年11月10日,在宁波组织了高效DBA的日常运维沙龙活动,大概有20人左右现场参加。会议的主题为: 目标:
1、识别高频低效操作并制定自动化方案 2、建立关键运维指标健康度体系 3、输出可立即落地的优化清单
会议议程 一、效能瓶…
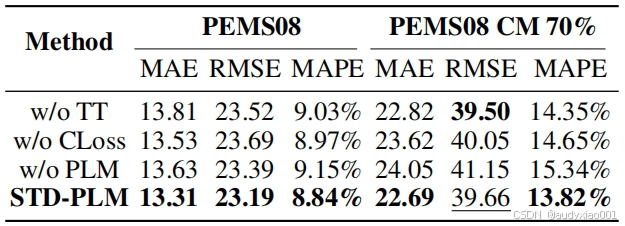
AAAI 2025论文分享│STD-PLM:基于预训练语言模型的时空数据预测与补全方法
本文详细介绍了一篇发表于人工智能顶级会议AAAI 2025的论文《STD-PLM: Understanding Both Spatial and Temporal Properties of Spatial-Temporal Data with PLM》。该论文提出了一种基于预训练语言模型(Pre-trained Language Model,PLM)的…

Ethernet/IP转DeviceNet网关:驱动大型矿山自动化升级的核心纽带
在大型矿山自动化系统中,如何高效整合新老设备、打通数据孤岛、实现统一控制,是提升效率与安全的关键挑战。JH-EIP-DVN疆鸿智能EtherNet/IP转DeviceNet网关,正是解决这一难题的核心桥梁,为矿山各环节注入强劲连接力:
…
![[蓝桥杯]模型染色](https://i-blog.csdnimg.cn/direct/c94cd8a9fe2f4a6da149d38c9e6767c5.png)
卡西欧模拟器:Windows端功能强大的计算器
引言
大家还记得初中高中时期用的计算器吗?今天给大家分享的就是一款windows端的卡西欧计算器。
软件介绍
大家好,我是逍遥小欢。
CASIO fx-9860G是一款功能强大的图形计算器,适用于数学、科学和工程计算。以下是其主要功能和特点的详细介…
机器学习基础(三) 逻辑回归
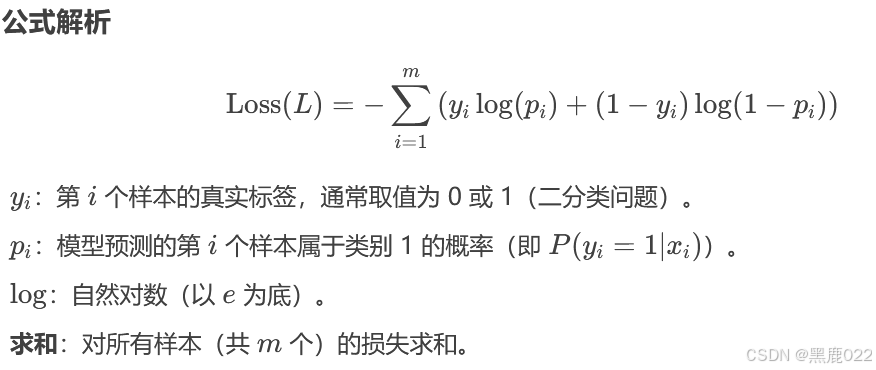
目录 逻辑回归的概念核心思想 Sigmoid 函数 逻辑回归的原理和底层优化手段伯努利分布最大似然估计 Maximum Likelihood Estimation (MLE)伯努利分布的似然函数交叉熵损失函数(Cross-Entropy Loss),也称为 对数损失&…
Qwen-3 微调实战:用 Python 和 Unsloth 打造专属 AI 模型
虽然大家都忙着在 DeepSeek 上构建应用,但那些聪明的开发者们却悄悄发现了 Qwen-3 的微调功能,这可是一个隐藏的宝藏,能把通用型 AI 变成你的专属数字专家。
通过这篇文章,你将学到如何针对特定用途微调最新的 Qwen-3 模型。无论…
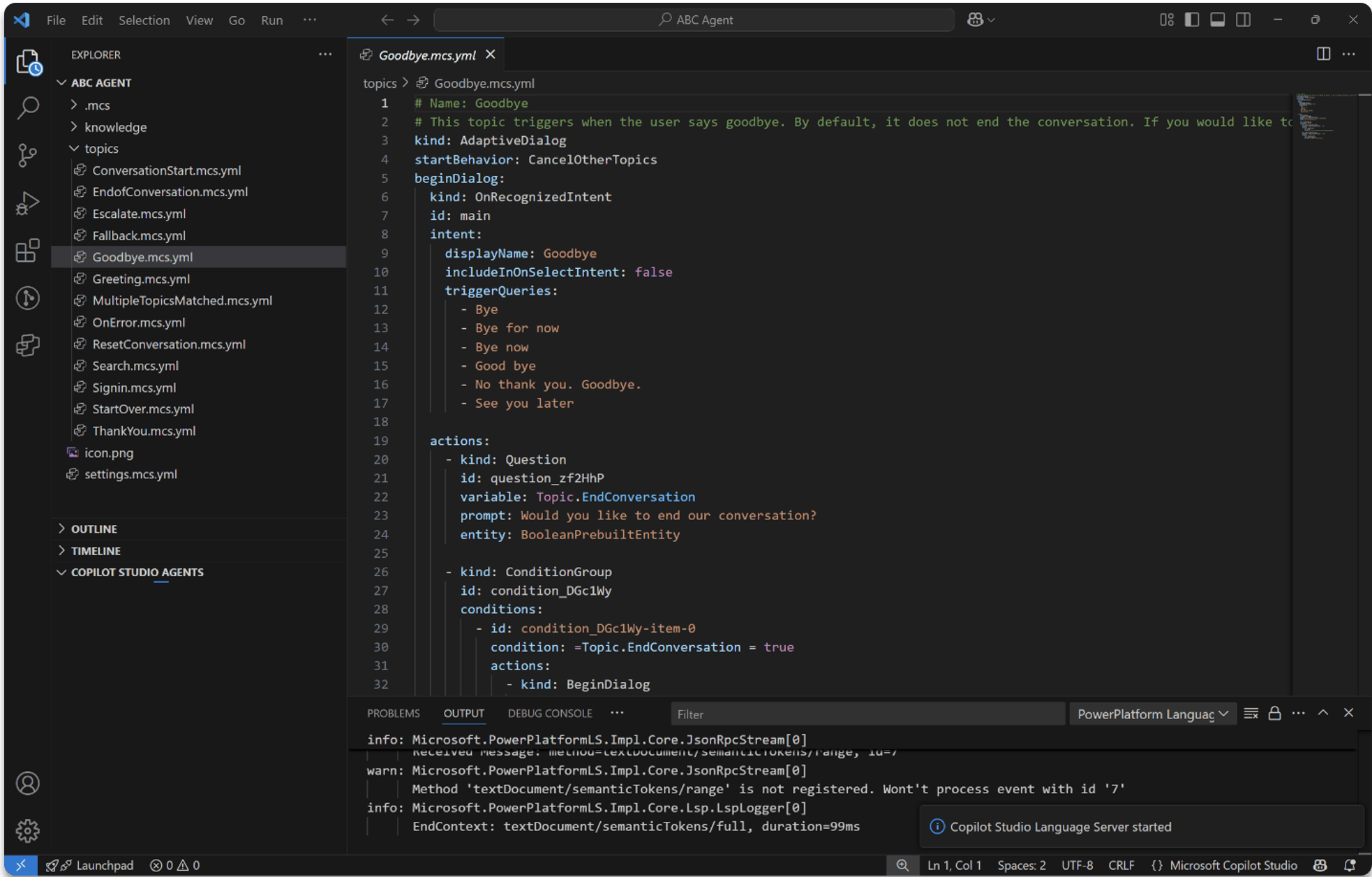
微软Build 2025:Copilot Studio升级,解锁多智能体协作未来
微软Build 2025大会圆满落幕,作为年度科技盛会,它一直是开发与AI技术突破性创新的重要展示平台。对于工程师、创作者和领域专家来说,这是了解微软生态未来动向的关键时刻。今年,Microsoft Copilot Studio推出了一系列新功能&#…
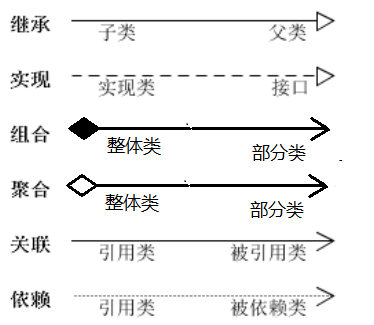
设计模式——系统数据建模设计
摘要
本文主要介绍了UML在软件系统分析和设计中的应用,详细阐述了六大类关系(泛化、实现、依赖、关联、聚合、组合)及其在UML类图中的表示方法,并通过具体例子说明了这些关系在实际编程中的应用。同时,文章还概述了UM…
解决docker运行zentao 报错:ln: failed to create symbolic link ‘/opt/zbox/tmp/mysq
1 背景描述
禅道使用docker部署运行过一段,服务正常。
后因服务器断电重启,禅道服务也随docker一起启动,但是服务却无法访问。如下如: 2 查看日志,定位原因
查看禅道日志:
# docker logs zentao容器di…

OA工程自动化办公系统 – 免费Java源码
概述
功能完备的OA工程自动化办公系统Java源码,采用主流技术栈开发,无论是学习SpringBoot框架还是开发企业级应用,都是不可多得的优质资源。
主要内容
技术架构
后端技术栈:
核心框架:SpringBoot 2.xORM框…

Apache IoTDB V2.0.3 发布|新增元数据导入导出脚本适配表模型功能
Release Announcement Version 2.0.3 Apache IoTDB V2.0.3 已经发布! V2.0.3 作为树表双模型正式版本,主要新增元数据导入导出脚本适配表模型、Spark 生态集成(表模型)、AINode 返回结果新增时间戳,表模型新增部分聚…

某校体育场馆结构自动化监测
1. 项目简介
某小学学校成立于2020年,是一所公办小学,以高起点定位为该区优质教育新增长极,依托当地学院及教师进修学院附属小学资源,注重学生综合素质培养,近年来,该小学聚焦“五育” 领域,不…

Android 3D球形水平圆形旋转,旋转动态更换图片
看效果图 1、事件监听类
OnItemClickListener:3D旋转视图项点击监听器接口
public interface OnItemClickListener {/*** 当旋转视图中的项被点击时调用** param view 被点击的视图对象* param position 被点击项在旋转视图中的位置索引(从0开始&a…

数据结构与算法学习笔记(Acwing 提高课)----动态规划·树形DP
数据结构与算法学习笔记----动态规划树形DP author: 明月清了个风 first publish time: 2025.6.4 ps⭐️树形动态规划(树形DP)是处理树结构问题的一种动态规划方法,特征也很明显,会有一个树形结构,其实是DFS的优化。…
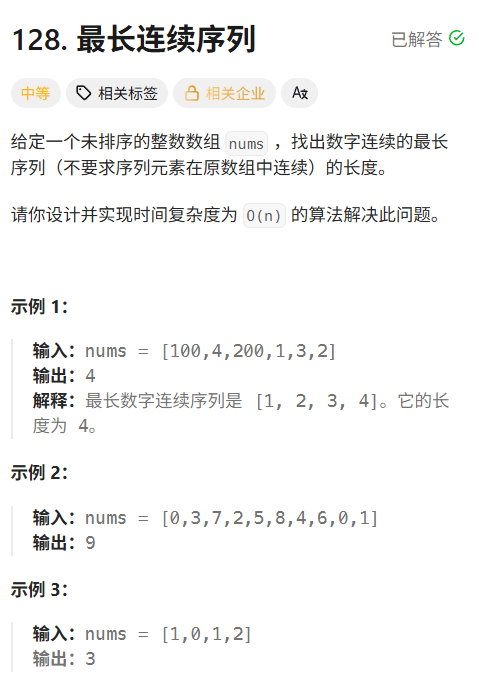
leetcode hot100刷题日记——36.最长连续序列
解答: 实际上在哈希表中存储不重复的数字。 然后遍历哈希表,找间隔,更新最大间隔。
class Solution {
public:int longestConsecutive(vector<int>& nums) {unordered_set<int>hash;for(int num:nums){hash.insert(num);}in…
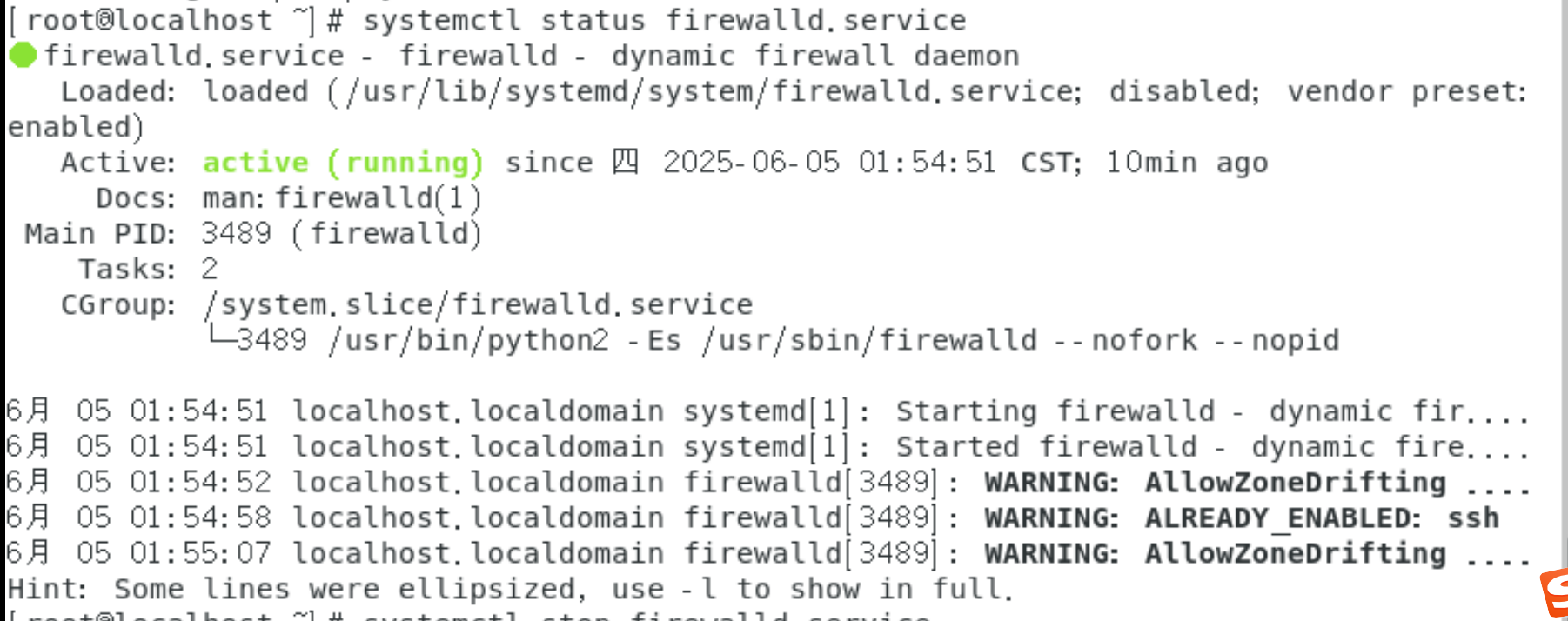
CentOS7关闭防火墙、Linux开启关闭防火墙
文章目录 一、firewalld开启、关闭防火墙1、查看防火墙状态 一、firewalld开启、关闭防火墙 以下命令在linux系统CentOS7中操作开启关闭防火墙 # 查询防火墙状态
systemctl status firewalld.service
# 开启防火墙
systemctl start firewalld.service
# 开机自启动防火墙
syste…