一、工业相机介绍
工业相机是机器视觉系统中的一个关键组件,其最本质的功能就是将光信号转变成有序的电信号。选择合适的相机也是机器视觉系统设计中的重要环节,相机的选择不仅直接决定所采集到的图像分辨率、图像质量等,同时也与整个系统的运行模式直接相关。
二、工业相机分类
按图像传感器区分
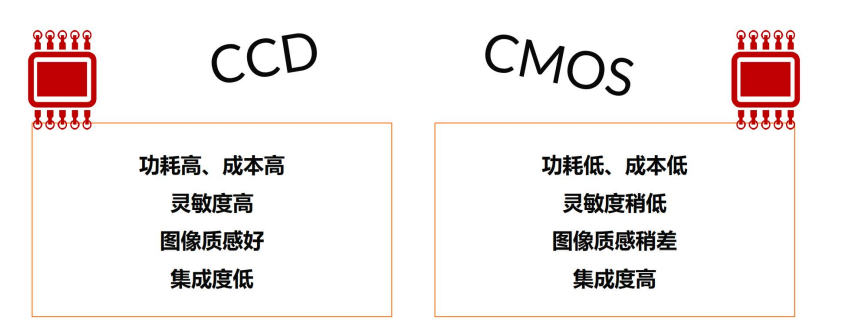
图像传感器(Image Sensor) ,是一种将光学图像转换成电子信号的设备,是组成数字摄像头的重要组成部分,可分为CCD(电荷耦合元件)和CMOS(互补金属氧化物半导体元件)两大类。
Sensor是一个由N行及M列感光单元(Pixel)组成的矩阵,Sensor基本工作原理:当光子撞击到硅原子上时,会产生自由电子,再将这些自由电子收集在一起形成信号。
CCD 相机:使用 CCD 感光芯片为图像传感器的相机,集光电转换及电荷存贮、电荷转移、信号读取于一体,是典型的固体成像器件。

CMOS 相机:使用 CMOS 感光芯片为图像传感器的相机,将光敏元阵列、图像信号放大器、信号读取电路、模数转换电路、图像信号处理器及控制器集成在一块芯片上,还具有局部像素的编程随机访问的优点。

按照图像传感器区分
单色相机:输出图像为单色图像的相机。
彩色相机:输出图像为彩色图像的相机。
按输出信号区分
模拟信号相机:从传感器中传出的信号,被转换成模拟电压信号,即普通视频信号后再传到图像采集卡中。
数字信号相机:信号自传感器中的像素输出后,在相机内部直接数字化并输出。数字相机又包含 1394 相机、USB 相机、Gige 相机、CameraLink相机等。
按照传感器类型区分
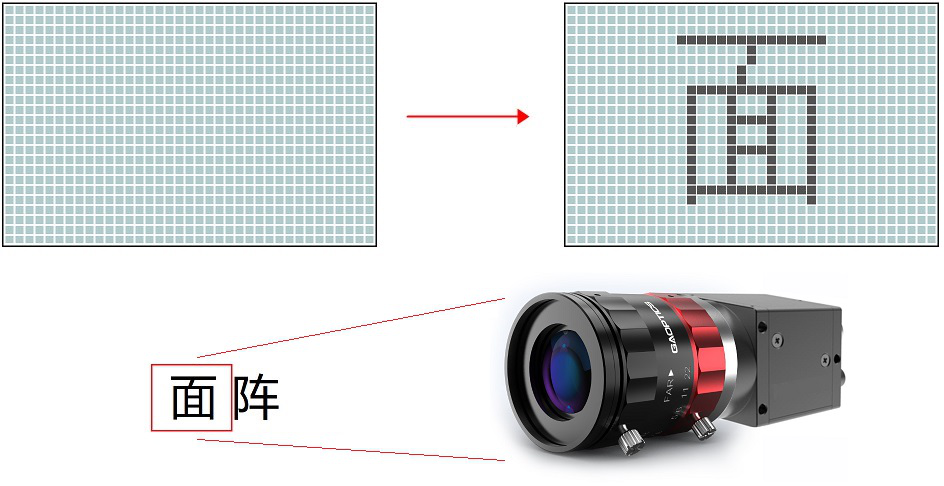
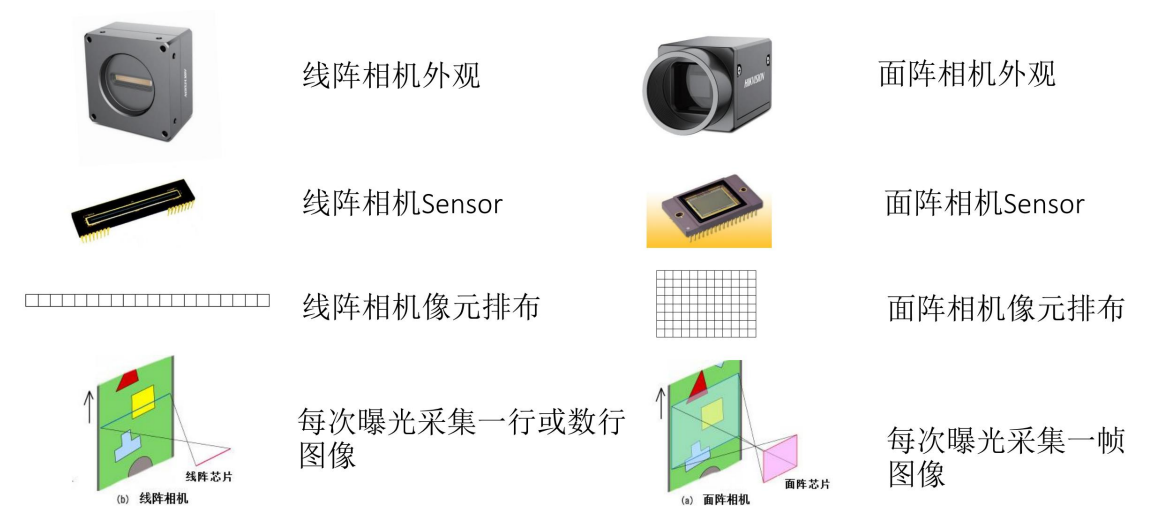
面扫描相机:传感器上像素呈面状分布的相机,其所成图像为二维“面”图像。
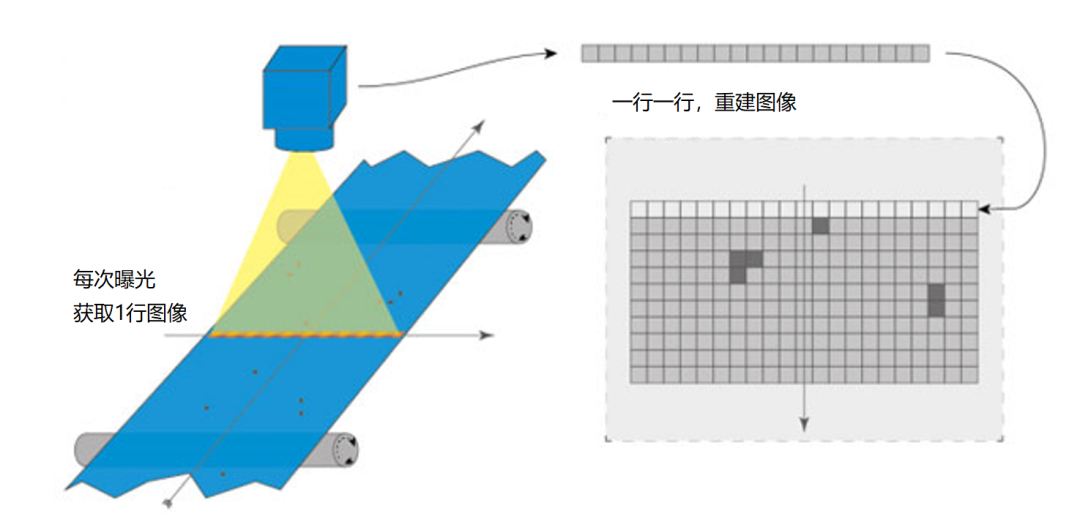
线扫描相机:传感器上呈线状(一行或三行)分布的相机,其所成图像为一维“线”图像。

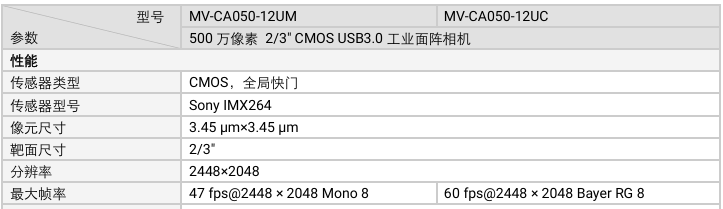
三、主要参数
相机的参数主要有传感器类型、快门方式、像元尺寸、靶面尺寸、分辨率、最大帧率、接口类型。
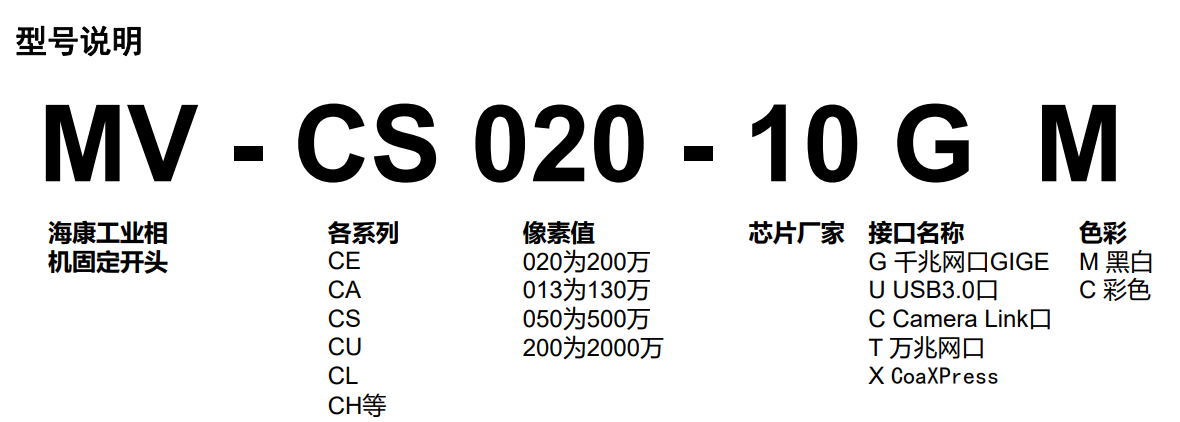
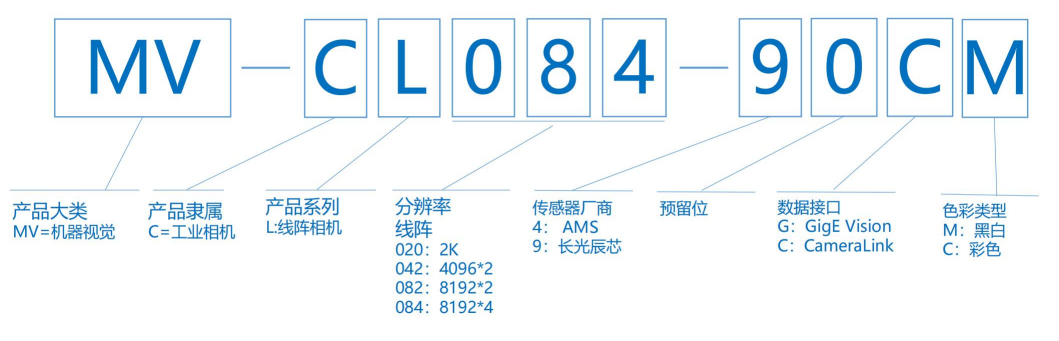
型号说明
图像传感器(Image Sensor)
图像传感器是一种将光学图像转换成电子信号的设备,是组成数字摄像头的重要组成部分,可分为CCD(电荷耦合元件)和 CMOS(互补金属氧化物半导体元件)两大类。Sensor 是一个由N行及M列感光单元(Pixel)组成的矩阵,Sensor基本工作原理:当光子撞击到硅原子上时,会产生自由电子,再将这些自由电子收集在一起形成信号。
快门方式
卷帘快门(Rolling Shutter)是Sensor通过逐行曝光的方式实现图像采集,在曝光开始的时候,Sensor逐行扫描逐行进行曝光,直至所有像素点都被曝光,不适合运动物体的拍摄。CMOS支持Rolling Shutter ,CCD不支持。卷帘快门的相机在拍摄运动中的 物体,图像会由于传感器不同行曝光时间不一样而产生图像失真 ,拖影。如下图Rolling Shutter。
全局快门(Global Shutter)是让整幅图片在同一时间曝光,Sensor所有像素点同时收集光线,同时曝光,最终将曝光图像转成电子图像。所有像素在同一时刻曝光,类似于将运动物体冻结了,适合拍摄快速运动的物体。CCD和CMOS都支持 Global Shutter;全局曝光的相机由于在曝光时整个图像芯片一起曝光,因此当物体运动时,可以由全局曝光相机对其进行动态拍摄。如下图Total Shutter。
像元尺寸
像元尺寸即一个像元的大小。像元大小和像元数(分辨率)共同决定了相机靶面的大小。
像元是反映影像特征的重要标志。是同时具有空间特征和波谱特征的数据元。几何意义是其数据值确定所代表的地面面积。物理意义是其波谱变量代表该像元内在某一特定波段中波谱响应的强度。即同一像元内的地物,只有一个共同灰度值。像元大小决定了数字影像的影像分辨率和信息量。像元小,影像分辨率高,信息量大;反之,影像分辨率低,信息量小。
靶面尺寸(Target size)
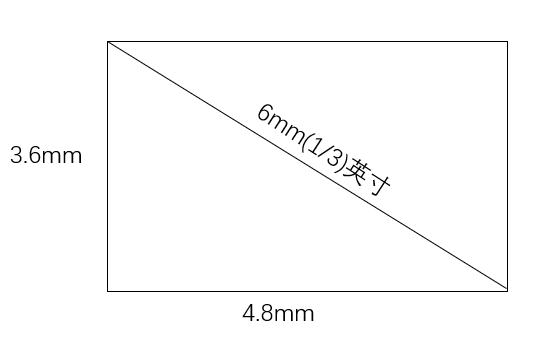
就是 CCD 尺寸,CCD 尺寸一般用英寸来表示,1/2 就是二分之一英寸,是对角线尺寸。
1 英寸换算成毫米是 16mm,而不是通常 的 25.4mm。
举例:像元尺寸 3.75umx3.75um,摄像机分辨率 1280x960,可以计算 CCD 尺寸:
3.75umx1280=4.8mm,
3.75umx960=3.6mm,
靶面尺寸为 1/3" 。
分辨率(Resolution)
相机每次采集图像的像素点数(Pixels)。
例如:MV-CA013-20GM的分辨率为1280x1024,相机为130万的黑白相机, 1280x1024=1310720=131.0720万。
最大帧率(Frame Rate)/行频(Line Rate)
相机采集传输图像的速率,对于面阵相机一般为每秒采集的帧数(Frames/Sec.),即每秒采集多少张图像,对于线阵相机为每秒采集的行数(Lines/Sec.)。这往往和传感器芯片和数据输出接口带宽有关。根据项目需求,对于拍摄运动物体,建议选取高帧率相机,具体帧率数要根据拍摄精度来确定。
相机接口数据传输


四、相机选型
工业相机是机器视觉系统中的⼀个关键组件,其最本质的功能就是将光信号转变成有序的电信号。选择合适的相机也是机器视觉系统设计中的重要环节,相机的选择不仅直接决定所采集到的图像分辨率、图像质量等,同时也与整个系统的运行模式直接相关。
1.确定黑白/彩色: 如果对颜色有检测需求(如线序颜色检测)或检测只能通过颜色判断需选择彩色,否则一般情况均选择黑白相机。
2.确定卷帘/全局快门 如果实际检测为动态,即产品在运动过程中拍照检测(如传送带上料),则需要选择全局快门的相机;如果实际检测为静态,即产品在静态时拍照检测(如人工摆放到固定位置进行检测),则可以选择卷帘快门的相机。
3.确定分辨率大小:
(1)产品检测需求为尺寸或者定位,有精度要求,可通过精度与检测视野面积进行计算得出需要的分辨率
(2)如果产品无精度要求,则优先可以考虑低像素的相机,如果成像或测试时,被测部分模糊不清楚,需要高分辨率的相机来提高成像,则再旋转高分辨率的相机
4、确定帧率
一般高速的动态检测速度可达到一秒10个以上,针对此种检测需求可以选择高帧率的相机(相机帧率为60fps表示1秒可以拍60张),一般情况下像素越低帧率越高。
分辨率计算
定位、测量用3倍精度,被测物尺寸要加入视场冗余尺寸,每个方向至少加5mm。
实际应用举例:被测工件尺寸20mm*40mm,要求检测精度0.1mm,动态定位,计算应该选用多少分辨率的相机?
相机选型:算法判断需要3*单像素精度,单像素精度要求=0.1mm/3=0.03mm;
实际视野:30mm*50mm
分辨率要求:(20+5+5mm)/0.03mm=1000,(40+5+5mm)/0.03mm=1666
分辨率要求大于1000*1666 且全局相机
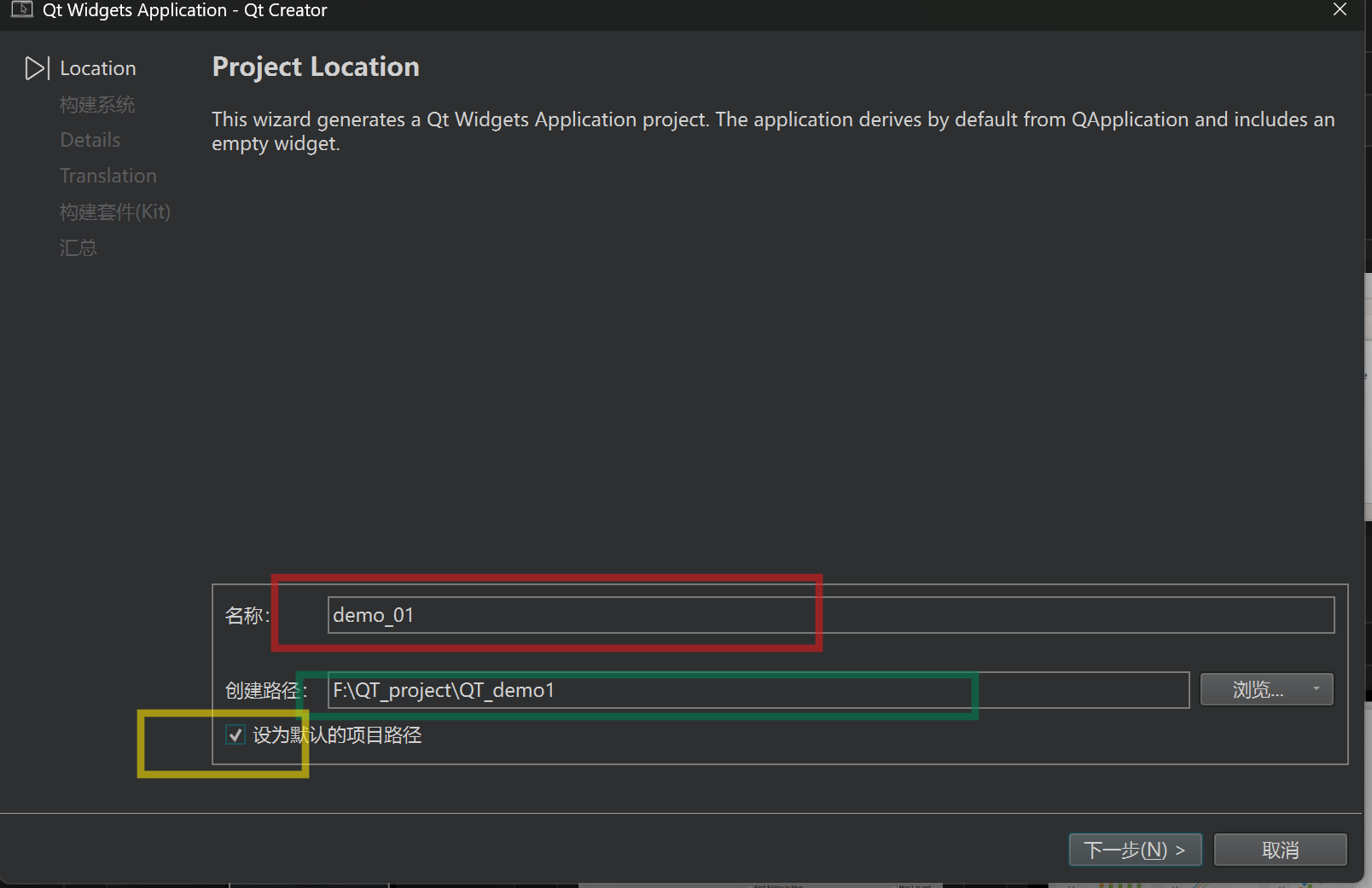
五、工业相机的驱动连接
相加硬件接口介绍

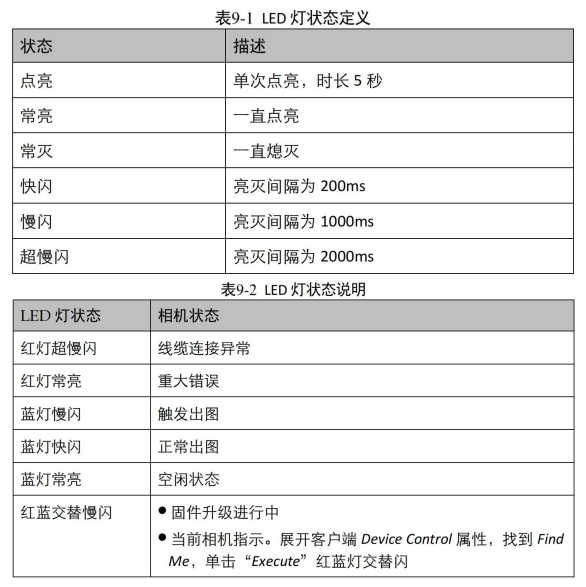
PWR状态灯
常规工业相机电源线介绍
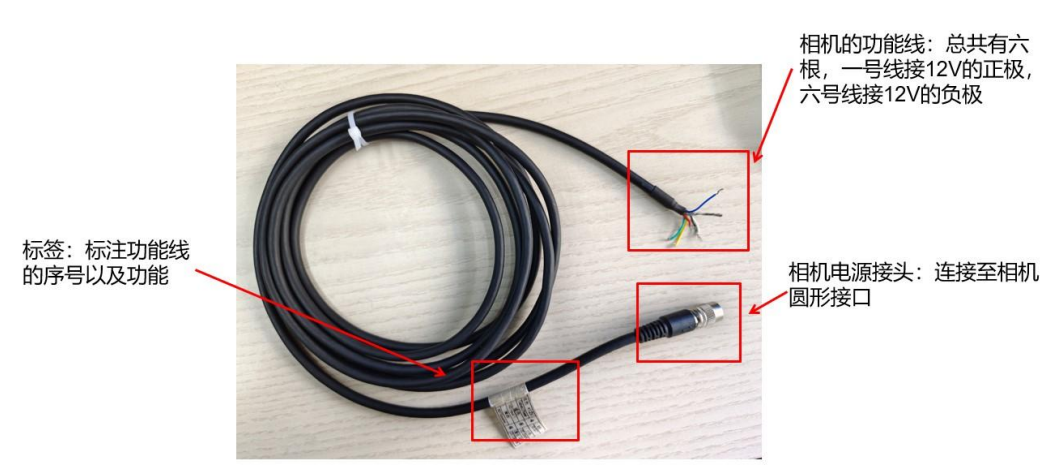
功能线介绍

六、相机IO设置
触发模式
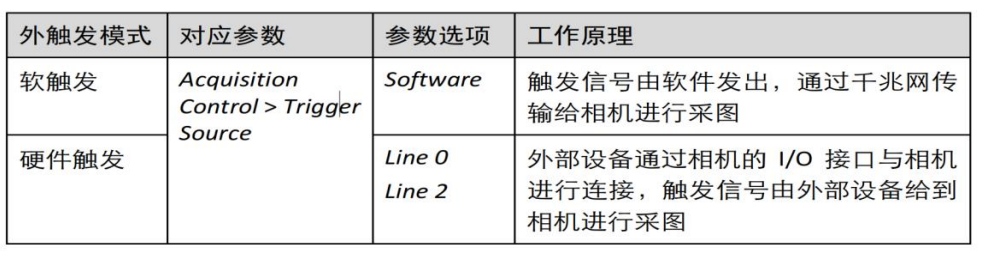
相机的触发模式分为内触发模式以及外触发模式 2 种。
内部触发就是软件触发,通过软件可以直接触发拍照。
外部触发就是外部接线控制触发拍照,例如按钮控制拍照、plc 控制拍照、光学感应器控制拍照。
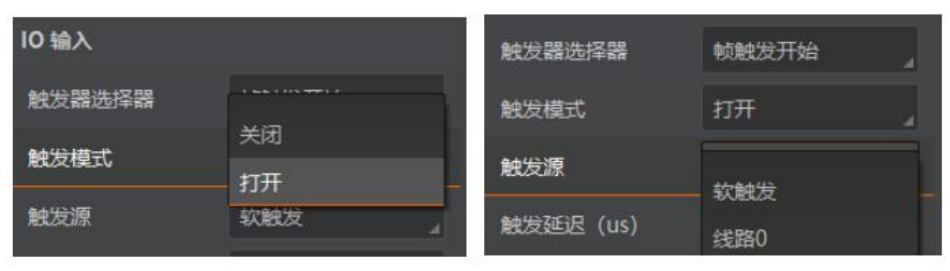
如果是内部触发,IO输入中触发模式选择关闭,触发源选择软触发。
如果是外部触发,IO输入中触发模式选择打开,触发源选择线路0。
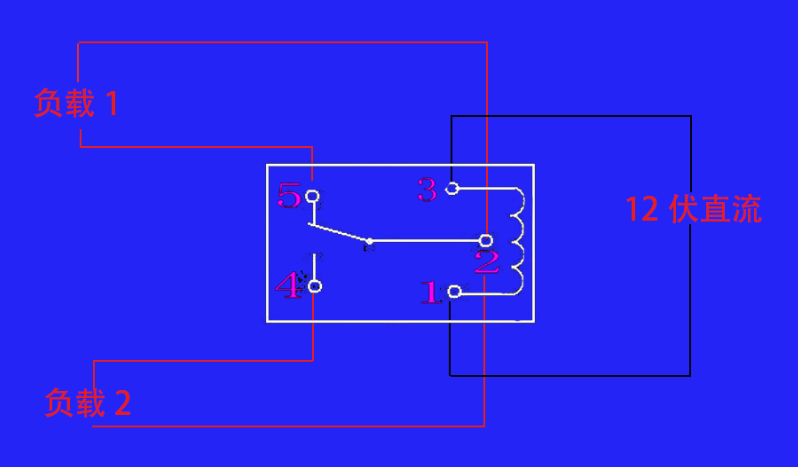
PNP与NPN
P表示正、N表示负。
NPN表示平时为低电位,信号到来时信号为高电位输出。
PNP表示平时为高电位,信号到来时信号为负。
线扫相机
对于这些视野很宽精度要求很高,或者细长型的连续的这类被测物,传统面阵相机的方案较难实现。
一种特殊的相机,它与普通的面阵相机的传感器拍摄一幅画面图像不同,它的传感器每次只采集一行或数行(彩色)图像。

型号说明
线扫与面阵区别
应用场景