引言
在 C 语言开发中,printf函数是我们调试程序、输出数据的得力助手,它能将格式化的数据输出到标准输出设备(通常是屏幕)。然而,在嵌入式领域,STM32 单片机并没有默认的显示设备,要让printf函数正常工作,就需要我们手动为它 “指定” 输出方向 —— 这就是重定向技术。通过重定向fputc函数,我们可以让 STM32 通过串口将数据输出到 PC 端或其他设备,实现实时调试与数据交互。本文将详细介绍如何在 STM32 上实现printf重定向到串口,让你的代码 “开口说话”。
一、重定向的核心概念
什么是重定向?
重定向的本质是修改标准库函数的输出目标。在 C 语言中,printf函数会调用fputc函数来完成实际的字符输出操作,而fputc默认指向的输出设备(如终端屏幕)在嵌入式系统中并不存在。因此,我们需要重新实现fputc函数,将字符输出的目标指向 STM32 的串口寄存器或 HAL 库的串口发送函数,这一过程就称为重定向。
为什么需要重定向?
-
无默认输出设备:STM32 本身没有显示屏,无法直接显示
printf的输出内容。 -
调试需求:通过串口将数据输出到 PC 端的串口调试助手,是嵌入式开发中最常用的调试手段之一。
-
灵活扩展:除了串口,重定向技术还可将输出指向 LCD、OLED 等其他设备,但串口是最基础、最常用的场景。
二、标准库与 HAL 库的重定向实现
(一)标准库实现(以 USART1 为例)
代码实现
#include "stdio.h"
#include "stm32f10x.h"
// 重定向fputc函数到USART1
int fputc(int c, FILE* stream) {
// 等待串口发送缓冲区为空(TC标志位为1)
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
// 将字符写入串口发送数据寄存器
USART_SendData(USART1, (uint8_t)c);
return c;
}
关键步骤解析
-
包含头文件:需要包含
stdio.h以使用标准库函数。 -
等待发送完成:
USART_GetFlagStatus(USART1, USART_FLAG_TC)用于检测串口发送缓冲区是否为空。只有当TC标志位为 1 时,才能发送下一个字符,避免数据丢失。 -
发送字符:通过
USART_SendData将字符写入串口的发送数据寄存器(DR),由硬件完成实际的串口发送过程。
使用注意事项
-
串口初始化:在使用
printf前,需先初始化 USART1(配置波特率、数据位、停止位等)。 -
MicroLIB 支持
:在 Keil MDK 中,需勾选
Target -> Use MicroLIB
否则可能因标准库依赖问题导致编译错误。
(二)HAL 库实现(以 huart1 为例)
代码实现
#include "stdio.h"
#include "stm32f10x_hal.h"
UART_HandleTypeDef huart1; // 假设已在CubeMX中配置好huart1
int fputc(int c, FILE *f) {
// 使用HAL库函数发送单个字符(阻塞模式)
HAL_UART_Transmit(&huart1, (uint8_t *)&c, 1, 0xFFFF);
return c;
}
关键步骤解析
-
HAL 库函数调用:
HAL_UART_Transmit是 HAL 库提供的串口发送函数,参数包括串口句柄、发送数据指针、数据长度和超时时间。 -
阻塞模式发送:最后一个参数
0xFFFF表示超时时间较长,确保发送成功。在非阻塞模式下,需结合中断或 DMA 使用,但重定向场景中阻塞模式更简单直接。
使用注意事项
-
CubeMX 配置:建议通过 CubeMX 工具初始化串口,生成
huart1的配置代码(包括时钟、引脚、波特率等)。 -
头文件包含:需包含
stm32f10x_hal.h以使用 HAL 库函数。
三、重定向的调试应用场景
1. 实时数据监控
通过printf输出传感器采集的数据(如温度、电压等),在 PC 端串口调试助手中实时显示,方便观察数据变化趋势。
float temp = get_temperature(); // 假设获取温度的函数
printf("Current temperature: %.2f ℃\n", temp);
2. 程序流程跟踪
在代码中插入printf语句,输出关键变量或函数执行状态,快速定位程序运行中的问题。
void key_processing(void) {
printf("Key pressed: %d\n", key_value); // 输出按键值
// 处理按键逻辑
}
3. 命令交互
结合串口接收功能,实现简单的命令行交互界面,通过printf返回命令执行结果。
if (cmd == "version") {
printf("System version: V1.0.0\n");
}
四、常见问题与解决方案
1. 输出乱码
-
原因:串口波特率、数据位、停止位等参数与调试助手不一致。
-
解决:确保 STM32 的串口配置与调试助手设置完全一致(如波特率 115200、8 位数据位、1 位停止位、无校验)。
2. 程序编译错误(未定义FILE类型)
-
原因:未包含
stdio.h头文件,或未启用 MicroLIB。 -
解决:添加
#include "stdio.h",并在 Keil 中勾选Use MicroLIB。
3. 输出延迟或卡顿
-
原因:串口发送缓冲区已满,后续字符被阻塞。
-
解决:确保
fputc函数中正确等待发送完成标志(如USART_FLAG_TC),或改用 DMA 方式发送以提高效率。
五、总结
通过重定向fputc函数,我们赋予了 STM32 使用printf函数的能力,使其能够通过串口与外界进行数据交互。无论是标准库还是 HAL 库,核心思路都是将字符输出指向串口的发送函数,并处理好发送过程中的同步问题。这一技巧不仅是调试的利器,也是实现设备监控、交互功能的基础。
六、最后
作为技术分享者,我一直致力于用清晰易懂的语言和详细的代码示例,帮助大家深入理解技术知识。但由于技术的复杂性和个人知识的局限性,文中可能存在不足或疏漏之处。非常期待大家在评论区提出宝贵意见和建议,无论是对内容的疑问,还是对代码优化的想法,都欢迎分享。让我们携手在技术学习的道路上不断探索、共同进步!


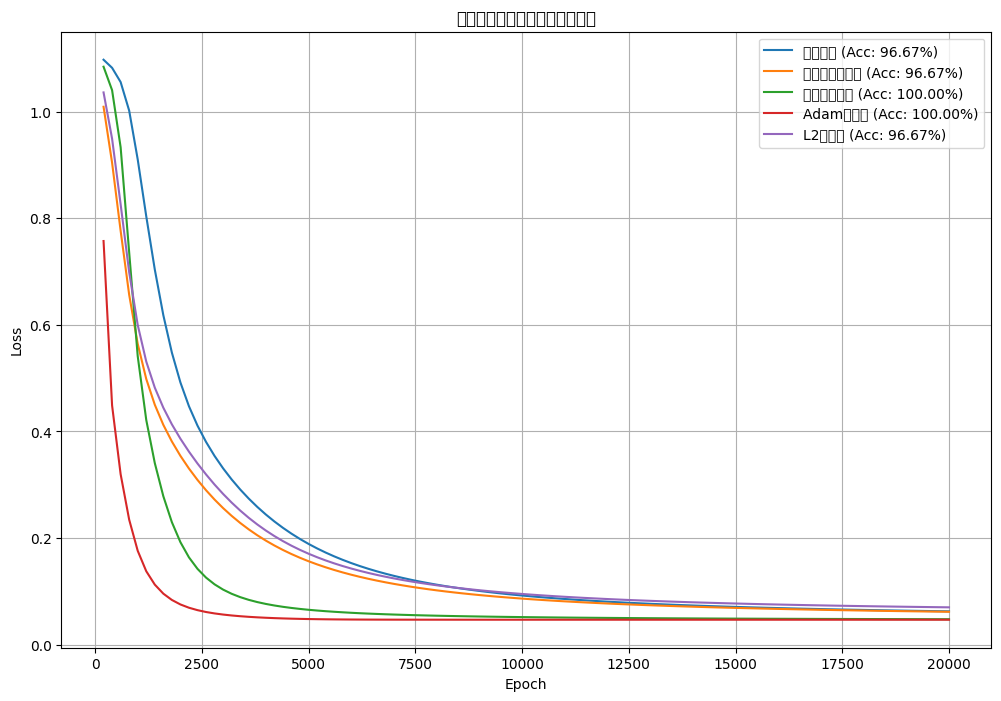
![[神经网络]使用olivettiface数据集进行训练并优化,观察对比loss结果](https://i-blog.csdnimg.cn/direct/d3f9b3ecf99f4846a6417d79091f3908.png#pic_center)