理解 docker commit 和 docker save 之间的区别对于正确管理 Docker 镜像非常重要。让我们详细解释一下这两个命令的作用及其区别。
1. docker commit
作用:
docker commit roop-builder roop:v1命令的作用是基于一个正在运行的容器roop-builder创建一个新的镜像roop:v1。- 这个命令会捕获容器在执行时的状态,包括文件系统的更改、环境变量、用户设置等,并将其保存为一个新的镜像。
结果:
- 新的镜像
roop:v1会存储在本地 Docker 的镜像存储目录中。 - 你可以使用
docker images命令查看这个镜像。
用途:
- 适用于在容器中进行了一些更改后,想要将这些更改保存为一个新的镜像,以便后续使用或分享。
2. docker save
作用:
docker save -o roop.tar roop:cuda118-py310命令的作用是将本地的镜像roop:cuda118-py310保存为一个 tar 归档文件roop.tar。- 这个命令不会基于容器创建新的镜像,而是将已经存在的镜像导出为文件。
结果:
- 生成的
roop.tar文件包含了镜像的所有层和元数据。 - 你可以将这个 tar 文件传输到其他机器上,并使用
docker load命令导入。
用途:
- 适用于备份镜像、传输镜像到其他机器或存储镜像以供后续使用。
- 例如,你可以在没有网络连接的环境中,通过物理介质传输镜像。
3. 二者之间的区别
| 特性 | docker commit | docker save |
|---|---|---|
| 操作对象 | 基于一个正在运行的容器创建一个新的镜像 | 将一个已经存在的镜像保存为一个 tar 文件 |
| 用途 | 捕获容器的当前状态并创建新的镜像 | 备份、传输或存储镜像 |
| 输出 | 新的镜像存储在本地 Docker 镜像存储中 | 生成的 tar 文件可以存储在任何地方 |
| 使用场景 | 在容器中进行了一些更改后,想要保存这些更改 | 需要将镜像传输到其他机器或进行备份 |
| 命令示例 | docker commit container_name new_image:tag | docker save -o image_file.tar image:tag |
| 反向操作 | docker images 查看新镜像,docker run 使用新镜像 | docker load -i image_file.tar 导入镜像 |
4. 具体例子解释
-
docker commit roop-builder roop:v1:
- 你在
roop-builder容器中进行了一些更改(例如,安装了软件包、修改了配置文件等)。 - 使用
docker commit命令将这些更改保存为一个新的镜像roop:v1。 - 这个镜像会存储在本地 Docker 的镜像存储目录中。
- 你在
-
docker save -o roop.tar roop:cuda118-py310:
- 你已经有一个名为
roop:cuda118-py310的镜像。 - 使用
docker save命令将该镜像保存为一个 tar 文件roop.tar。 - 这个 tar 文件可以用于备份或传输到其他机器上。
- 你已经有一个名为
5. 总结
docker commit是基于一个容器创建一个新的镜像,适用于捕获容器的当前状态。docker save是将一个已经存在的镜像保存为一个 tar 文件,适用于备份或传输镜像。
理解这两者的区别可以帮助你更有效地管理和使用 Docker 镜像。如果你需要将镜像从一台机器传输到另一台机器,或者进行备份,使用 docker save 和 docker load 是合适的选择。如果你只是想在容器中进行一些更改并保存这些更改,使用 docker commit 更为合适。


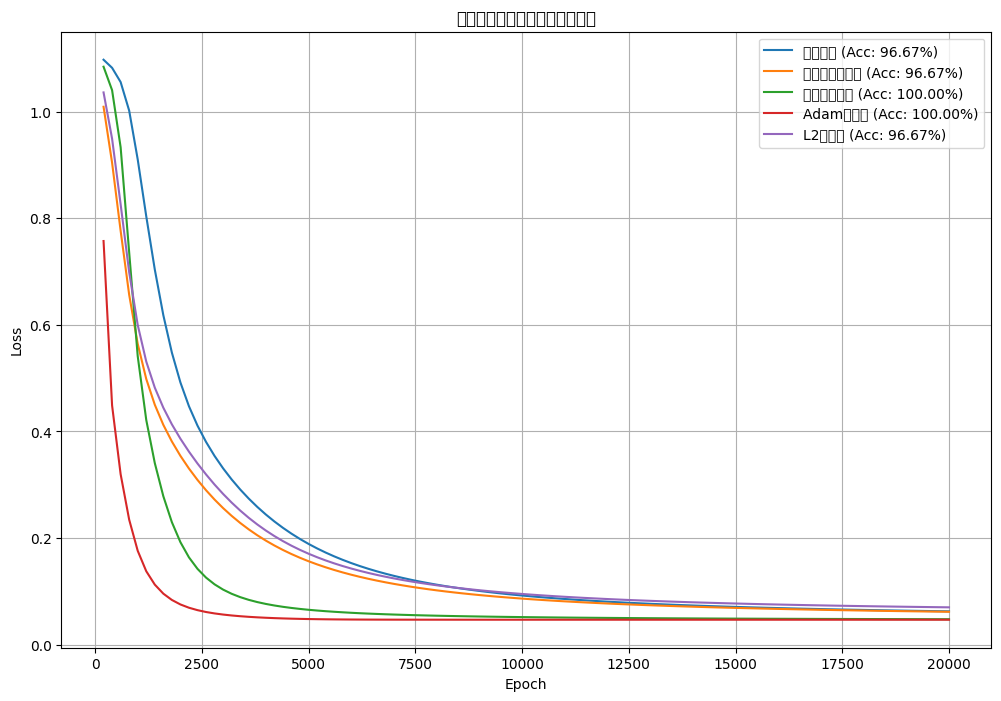
![[神经网络]使用olivettiface数据集进行训练并优化,观察对比loss结果](https://i-blog.csdnimg.cn/direct/d3f9b3ecf99f4846a6417d79091f3908.png#pic_center)