若该文为原创文章,转载请注明原文出处。
最近在研究使用APP如何显示ESP32 CAM的摄像头数据,看到有人实现把ESP32 CAM的数据流上传,通过YOLOV5来检测,实现拉流推理,这里复现一下。
一、环境
arduino配置esp32-cam开发环境
https://www.jianshu.com/p/c1a69a6772f3软件自行安装
二、程序
程序是基于esp32的例子上修改的
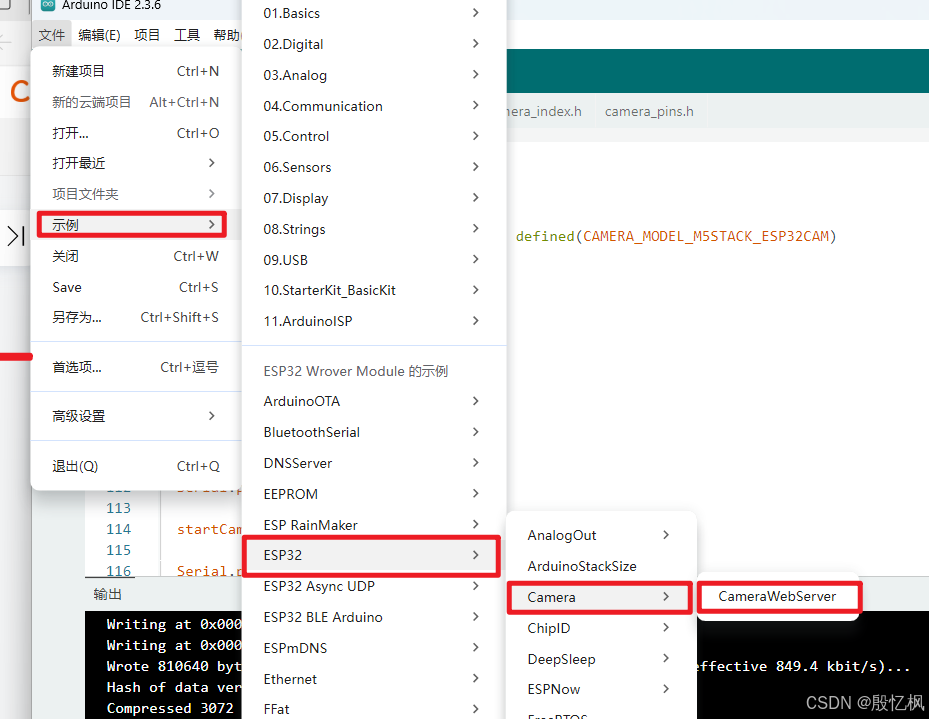
修改主要是几个地方
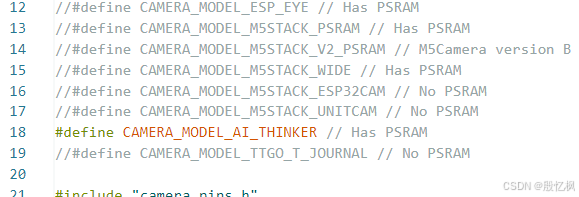
1、摄像头
根据自己的ESP32 CAM选择
2、WIFI

3、配置TCP端口
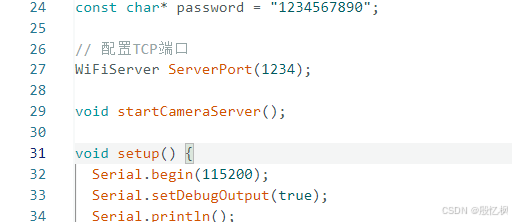
配置是为了YOLOV5拉流使用
4、源码
#include "esp_camera.h"
#include <WiFi.h>
//
// WARNING!!! PSRAM IC required for UXGA resolution and high JPEG quality
// Ensure ESP32 Wrover Module or other board with PSRAM is selected
// Partial images will be transmitted if image exceeds buffer size
//
// Select camera model
//#define CAMERA_MODEL_WROVER_KIT // Has PSRAM
//#define CAMERA_MODEL_ESP_EYE // Has PSRAM
//#define CAMERA_MODEL_M5STACK_PSRAM // Has PSRAM
//#define CAMERA_MODEL_M5STACK_V2_PSRAM // M5Camera version B Has PSRAM
//#define CAMERA_MODEL_M5STACK_WIDE // Has PSRAM
//#define CAMERA_MODEL_M5STACK_ESP32CAM // No PSRAM
//#define CAMERA_MODEL_M5STACK_UNITCAM // No PSRAM
#define CAMERA_MODEL_AI_THINKER // Has PSRAM
//#define CAMERA_MODEL_TTGO_T_JOURNAL // No PSRAM
#include "camera_pins.h"
const char* ssid = "yifeng";
const char* password = "1234567890";
// 配置TCP端口
WiFiServer ServerPort(1234);
void startCameraServer();
void setup() {
Serial.begin(115200);
Serial.setDebugOutput(true);
Serial.println();
// 配置闪光灯
pinMode(4, OUTPUT);
// 关闭闪光灯
digitalWrite(4, LOW);
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
// if PSRAM IC present, init with UXGA resolution and higher JPEG quality
// for larger pre-allocated frame buffer.
if(psramFound()){
config.frame_size = FRAMESIZE_UXGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
#if defined(CAMERA_MODEL_ESP_EYE)
pinMode(13, INPUT_PULLUP);
pinMode(14, INPUT_PULLUP);
#endif
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
sensor_t * s = esp_camera_sensor_get();
// initial sensors are flipped vertically and colors are a bit saturated
if (s->id.PID == OV3660_PID) {
s->set_vflip(s, 1); // flip it back
s->set_brightness(s, 1); // up the brightness just a bit
s->set_saturation(s, -2); // lower the saturation
}
// drop down frame size for higher initial frame rate
//s->set_framesize(s, FRAMESIZE_QVGA);
s->set_framesize(s, FRAMESIZE_SVGA);
s->set_vflip(s, 1);
s->set_hmirror(s, 1);
#if defined(CAMERA_MODEL_M5STACK_WIDE) || defined(CAMERA_MODEL_M5STACK_ESP32CAM)
s->set_vflip(s, 1);
s->set_hmirror(s, 1);
#endif
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
startCameraServer();
Serial.print("Camera Ready! Use 'http://");
Serial.print(WiFi.localIP());
Serial.println("' to connect");
// 打开TCP
ServerPort.begin();
}
void loop()
{
unsigned char i = 200;
// 等待客户端连接
WiFiClient client = ServerPort.available();
if (client) {
Serial.println("New client connected");
while (client.connected()) {
// 检查是否有数据可供读取
if (client.available()) {
// 读取客户端发送的数据
String data = client.readStringUntil('\n');
Serial.print("Received data: ");
Serial.println(data);
// 发送响应到客户端
String response = "Server received: " + data;
client.println(response);
}
}
// 断开与客户端的连接
client.stop();
Serial.println("Client disconnected");
}
}三、YOLOV5环境安装
YOLOV5采用的是5.0版本,下载源码后安装
参考:AI学习笔记二:YOLOV5环境搭建及测试全过程_yolov5 测试-CSDN博客
测试代码:
import cv2
import torch
import numpy as np
import socket
camera_url = "http://192.168.50.2:81/stream"
send_msg = "found"
# 创建socket对象
socket_client = socket.socket()
# 连接到服务器
socket_client.connect(("192.168.50.2", 1234))
# 读取yolov5模型
model = torch.hub.load('E:/desktop/ESP32_CAM/yolov5-5.0/', 'custom',
'E:/desktop/ESP32_CAM/yolov5-5.0/yolov5s.pt', source='local')
# 设置模型
model.conf = 0.4
cap = cv2.VideoCapture(camera_url)
while True:
ret, frame = cap.read()
frame = cv2.flip(frame, 1)
img_cvt = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
results = model(img_cvt)
# 打印得到的数据
# print(str(results.pandas().xyxy[0].to_numpy()[:, -1])) # tensor-to-numpy
results_ = results.pandas().xyxy[0].to_numpy()
for result in results_:
target = result[6]
if target != "":
#发送消息
socket_client.send(send_msg.encode("UTF-8"))
print(target)
i = 0
# 画图
for box in results_:
l, t, r, b = box[:4].astype('int')
confidence = str(round(box[4] * 100, 2)) + "%"
cls_name = box[6]
cv2.rectangle(frame, (l, t), (r, b), (0, 200, 55), 2)
cv2.putText(frame, cls_name + "-" + confidence, (l, t), cv2.FONT_ITALIC, 1, (200, 55, 0), 2)
cv2.imshow("result", frame)
if cv2.waitKey(10) & 0xFF == ord("q"):
break
cap.release()
cv2.destroyAllWindows()
# 关闭连接
socket_client.close()代码需要注意的是地址,根据板子的地址,自行修改
测试结果:
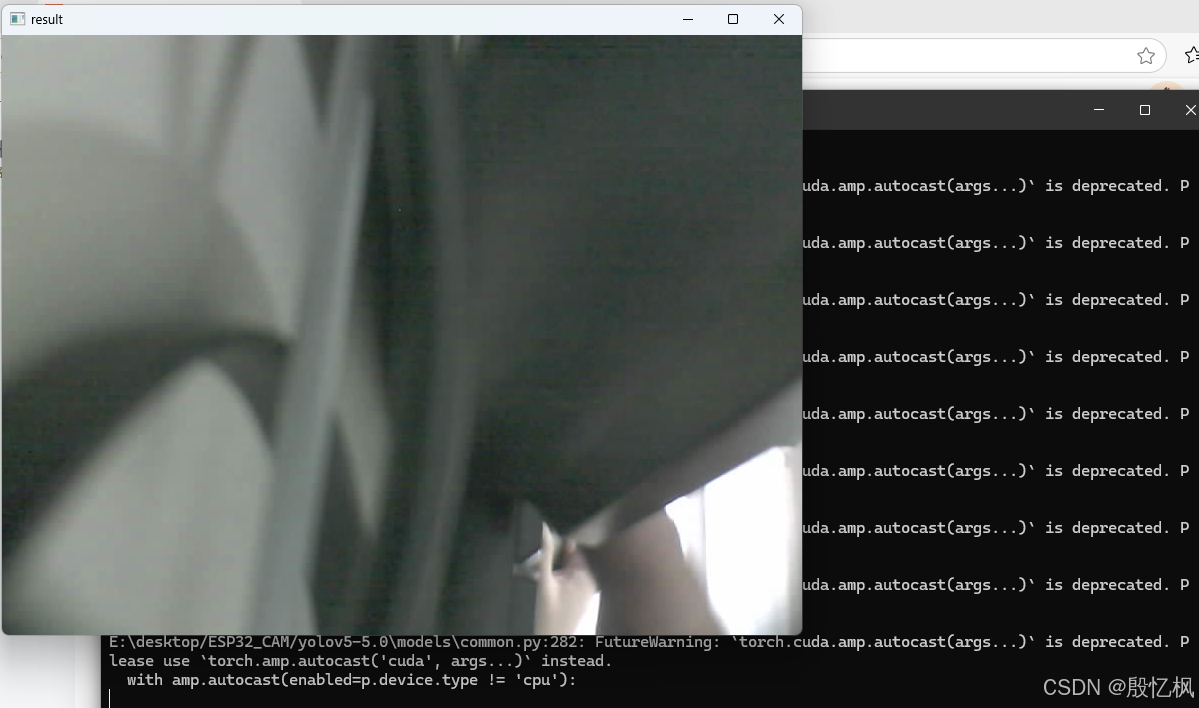
四、YOLOV11测试
import cv2
import torch
import numpy as np
import socket
import cv2
from ultralytics import YOLO
camera_url = "http://192.168.1.106:81/stream"
send_msg = "found"
# 创建socket对象
socket_client = socket.socket()
# 连接到服务器
socket_client.connect(("192.168.1.106", 1234))
def predict(chosen_model, img, classes=[], conf=0.5):
if classes:
results = chosen_model.predict(img, classes=classes, conf=conf)
else:
results = chosen_model.predict(img, conf=conf)
return results
def predict_and_detect(chosen_model, img, classes=[], conf=0.5, rectangle_thickness=2, text_thickness=1):
results = predict(chosen_model, img, classes, conf=conf)
for result in results:
for box in result.boxes:
cv2.rectangle(img, (int(box.xyxy[0][0]), int(box.xyxy[0][1])),
(int(box.xyxy[0][2]), int(box.xyxy[0][3])), (255, 0, 0), rectangle_thickness)
cv2.putText(img, f"{result.names[int(box.cls[0])]}",
(int(box.xyxy[0][0]), int(box.xyxy[0][1]) - 10),
cv2.FONT_HERSHEY_PLAIN, 1, (255, 0, 0), text_thickness)
return img, results
# defining function for creating a writer (for mp4 videos)
def create_video_writer(video_cap, output_filename):
# grab the width, height, and fps of the frames in the video stream.
frame_width = int(video_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
frame_height = int(video_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = int(video_cap.get(cv2.CAP_PROP_FPS))
# initialize the FourCC and a video writer object
fourcc = cv2.VideoWriter_fourcc(*'MP4V')
writer = cv2.VideoWriter(output_filename, fourcc, fps,
(frame_width, frame_height))
return writer
model = YOLO("G:/enpei_Project_Code/ESP32_CAM/yolo11s.pt")
cap = cv2.VideoCapture(camera_url)
while True:
success, img = cap.read()
if not success:
break
result_img, _ = predict_and_detect(model, img, classes=[], conf=0.5)
# 打印得到的数据
# print(str(results.pandas().xyxy[0].to_numpy()[:, -1])) # tensor-to-numpy
cv2.imshow("Image", result_img)
if cv2.waitKey(10) & 0xFF == ord("q"):
break
cap.release()
cv2.destroyAllWindows()
# 关闭连接
socket_client.close()这个只是个demo测试,还是想实现如果使用APP显示。
如有侵权,或需要完整代码,请及时联系博主。