针对分布式组网CMIMO雷达多目标跟踪(MTT)场景,博客分析了一种目标-雷达匹配方案与功率联合优化算法。在采用分布式组网融合架构的基础上,推导包含波束和功率分配的后验克拉美罗界(PCRLB)。随后,将该效用函数结合CMIMO雷达系统资源,建立了波束分配与功率联合优化模型。最后,利用迭代优化算法进行求解,利用协方差交叉CI融合完成多部雷达对多个目标的协同跟踪,有效提高组网CMIMO雷达的综合跟踪精度。
1.目标运动模型
图1为CMIMO雷达对多个目标同时跟踪的场景示意图。
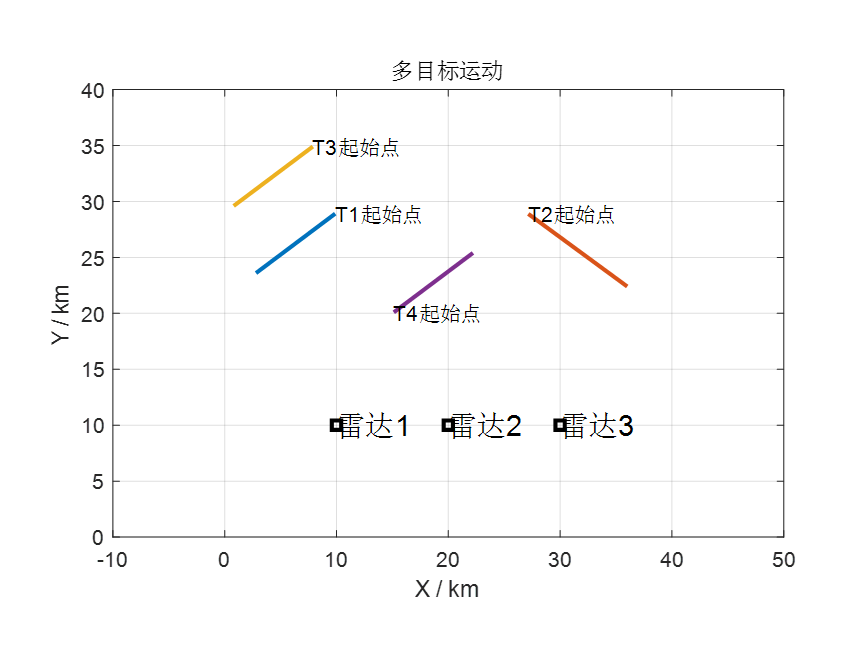
图1 CMIMO网络同时多波束跟踪
假设Q个彼此分离的目标做匀速直线CV运动,第q个目标在第k时刻的运动模型定义:
其中为状态向量。
状态转移矩阵为:
为一个零均值的高斯白噪声,其协方差表示为:
是用来控制过程噪声大小的系数。
2.雷达量测模型
设CMIMO雷达坐标为(0, 0)。在k时刻对Q个目标进行跟踪,第q个目标对应量测和状态向量之间的转换关系表示为:
其中为量测噪声,
为量测和状态向量之间的映射过程,分别为距离、速度与角度:
量测噪声的协方差矩阵表示为:
其中,为目标RCS,
为实际功率,
为大小与距离4次方成反比的衰减系数。上式可以看出,在跟踪过程中,目标RCS和雷达发射参数均会影响量测协方差。
3.多目标跟踪PCRLB递推
跟踪滤波的无偏估计量与目标状态向量之间满足:
其中为无偏估计量;
表示数学期望操作;
表示PCRLB矩阵,对应逆矩阵为目标q所对应的Fisher Information Matrix。其递推公式为:
其中表示目标状态先验分布对应的FIM,
为量测信息FIM。
表示雅克比矩阵:
。对FIM求逆得到PCRLB矩阵:
其中为k时刻对第q个目标分配的功率资源,
为雷达与目标的匹配方案。
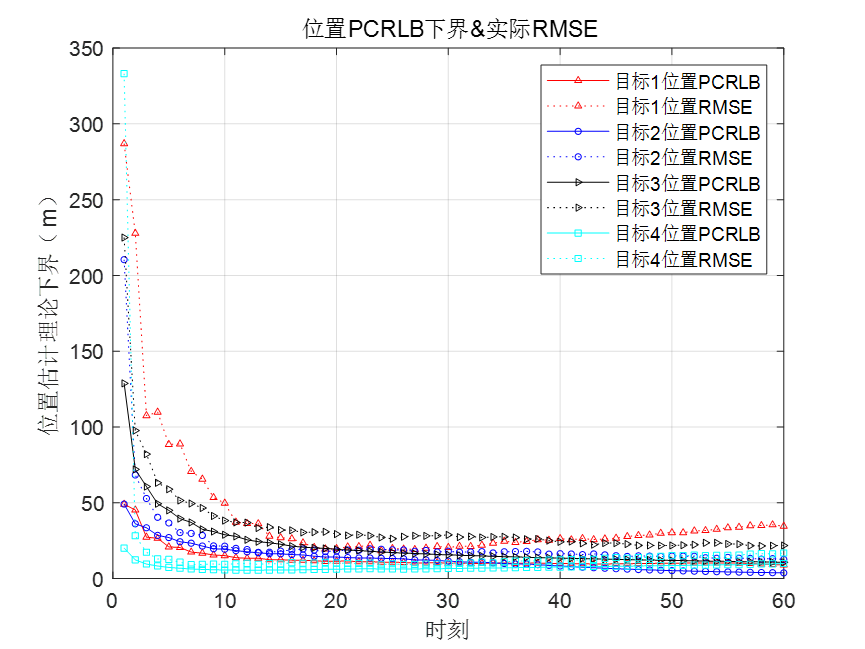
对角线元素对应目标状态向量的无偏估计方差下界,可将其作为代价函数:
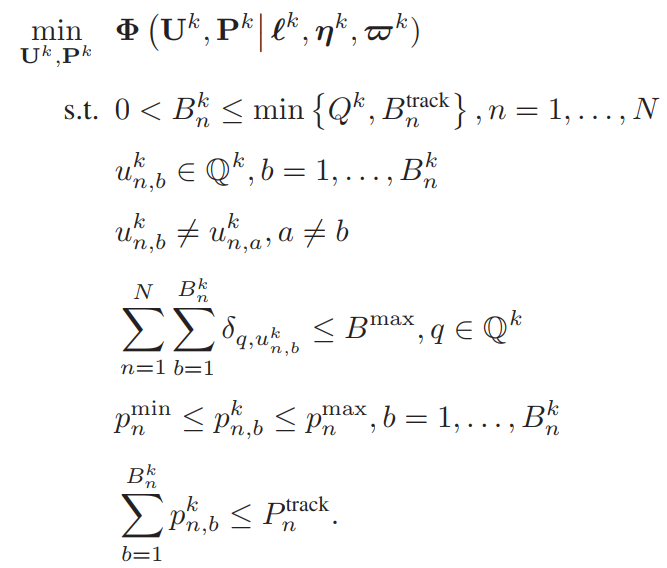
。进一步地,可以跟踪实际物理约束构造资源调度模型,我们采用MinMax准则优化多目标跟踪精度。并利用CI融合完成多部雷达的协同跟踪。
MinMax-PCRLB优化模型可以建模为:
4.仿真实验
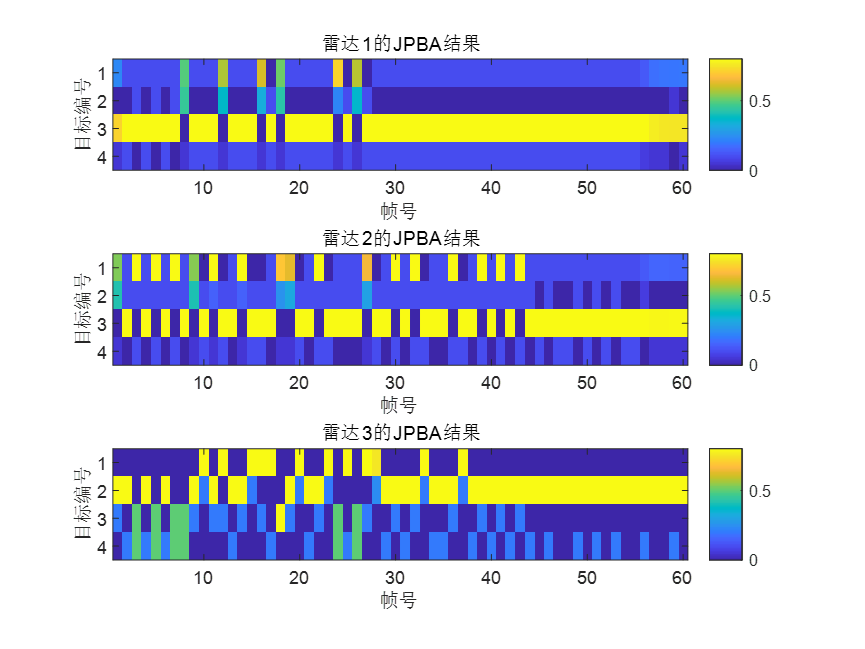
可以通过设计的优化算法进行求解,得到下一帧的雷达资源调度方案。
如有代码问题,加UltraNextYJ交流。
部分代码如下:
T = 1; % 采样频率
N_frame = 60; % 跟踪总时长
P_total = 10e3; % 雷达总功率
RCS = 1;
lb = 0.05; % 功率下限
ub = 0.8; % 功率上限
MC = 100; % 蒙特卡洛次数
Bmax = 2; % 分配给每个目标的最多波束
Tmax = 3; % 每部雷达最多发射波束
Marker = 1:1:N_frame; % 标记间隔
LAMBDA = diag([1,T]); % 用于平衡协方差矩阵中位置方差与速度方差的量纲
LAMBDA = blkdiag(LAMBDA,LAMBDA);
% 初始化雷达位置
xr(:,1) = [10e3, 0, 10e3, 0]';
xr(:,2) = [20e3, 0, 10e3, 0]';
xr(:,3) = [30e3, 0, 10e3, 0]';
R_NUM = size(xr,2); % 雷达个数
% 初始目标状态变量【x位置,x速度,y位置,y速度】
xt(:,1) = [10e3, -120, 29e3, -90]';
xt(:,2) = [27e3, 150, 29e3, -110]';
xt(:,3) = [8e3, -120, 35e3, -90]';
xt(:,4) = [15e3, 120, 20e3, 90]';
T_NUM = size(xt,2); % 目标个数
%% 观测误差基准值
% 使用0.1P_total、全带宽、全时宽对100km处RCS为1m2的目标进行观测,基准观测误差
sigma_r_basic = 1500;
sigma_b_basic = 0.01;
sigma_v_basic = 100;
% 基准发射参数、相对位置与基准目标RCS
power_basic = 0.1 * P_total;
rcs_basic = 1; % 基准RCS为1m2
r_basic = 50e3; % 观测的基准距离
coef1 = sigma_r_basic^2 * power_basic * rcs_basic.^2 / (r_basic.^4);
coef2 = sigma_b_basic^2 * power_basic * rcs_basic.^2 / (r_basic.^4);
coef3 = sigma_v_basic^2 * power_basic * rcs_basic.^2 / (r_basic.^4);
coef = [coef1, coef2, coef3];
%% 状态转移过程构建
state_num = 4; % 状态维度
Fk=[1, T, 0, 0;
0, 1, 0, 0;
0, 0, 1, T;
0, 0, 0, 1]; % 转移矩阵
ka = 0.2; % 目标运动过程噪声
Qk = ka^2*[T^3/3, T^2/2, 0, 0;
T^2/2, T, 0, 0;
0, 0, T^3/3, T^2/2;
0, 0, T^2/2, T]; % 过程噪声协方差
Gk= eye(4); % 过程噪声增益矩阵
% 跟踪的观测误差均值误差
v_mu = [0,0,0]'; % 观测误差的高斯白噪声的均值