目录
数据集:
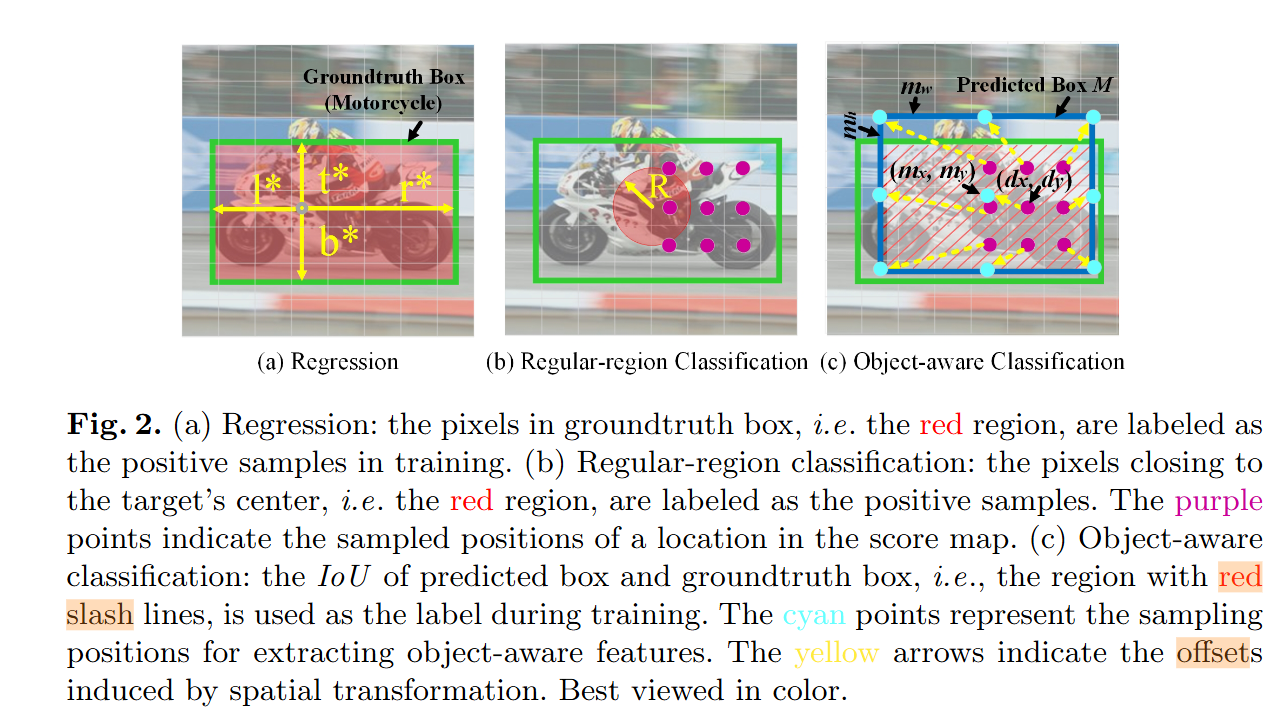
3d 投影到2d 继续求loss
reconstruct_absolute
1. 功能概述
2. 参数详解
3. 两种重建模式对比
数据集:
agora3 | 5264/5264 [00:00<00:00, 143146.78it/s]
behave 37736/37736 [00:00<00:00, 76669.67it/s]
mads 32649/32649 [00:00<00:00, 32823.97it/s]
coco 38592/38592 [00:00<00:00, 150037.89it/s]
densepose_coco.pkl 29586/29586 [00:00<00:00, 143833.04it/s]
3d 投影到2d 继续求loss
compute_loss_with_3d_gt
def compute_loss_with_3d_gt(self, inps, preds):
losses = EasyDict()
if inps.point_validity is None:
inps.point_validity = tf.ones_like(preds.coords3d_abs[..., 0], dtype=tf.bool)
diff = inps.coords3d_true - preds.coords3d_abs
# CENTER-RELATIVE 3D LOSS
# We now compute a "center-relative" error, which is either root-relative
# (if there is a root joint present), or mean-relative (i.e. the mean is subtracted).
meanrel_diff = tfu3d.center_relative_pose(
diff, joint_validity_mask=inps.point_validity, center_is_mean=True)
# root_index is a [batch_size] int tensor that holds which one is the root
# diff is [batch_size, joint_cound, 3]
# we now need to select the root joint from each batch element
if inps.root_index.shape.ndims == 0:
inps.root_index = tf.fill(tf.shape(diff)[:1], inps.root_index)
# diff has shape N,P,3 for batch, point, coord
# and root_index has shape N
# and we want to select the root joint from each batch element
sanitized_root_index = tf.where(
inps.root_index == -1, tf.zeros_like(inps.root_index), inps.root_index)
root_diff = tf.expand_dims(tf.gather_nd(diff, tf.stack(
[tf.range(tf.shape(diff)[0]), sanitized_root_index], axis=1)), axis=1)
rootrel_diff = diff - root_diff
# Some elements of the batch do not have a root joint, which is marked as -1 as root_index.
center_relative_diff = tf.where(
inps.root_index[:, tf.newaxis, tf.newaxis] == -1, meanrel_diff, rootrel_diff)
losses.loss3d = tfu.reduce_mean_masked(
self.my_norm(center_relative_diff, preds.uncert), inps.point_validity)
# ABSOLUTE 3D LOSS (camera-space)
absdiff = tf.abs(diff)
# Since the depth error will naturally scale linearly with distance, we scale the z-error
# down to the level that we would get if the person was 5 m away.
scale_factor_for_far = tf.minimum(
np.float32(1), 5 / tf.abs(inps.coords3d_true[..., 2:]))
absdiff_scaled = tf.concat(
[absdiff[..., :2], absdiff[..., 2:] * scale_factor_for_far], axis=-1)
# There are numerical difficulties for points too close to the camera, so we only
# apply the absolute loss for points at least 30 cm away from the camera.
is_far_enough = inps.coords3d_true[..., 2] > 0.3
is_valid_and_far_enough = tf.logical_and(inps.point_validity, is_far_enough)
# To make things simpler, we estimate one uncertainty and automatically
# apply a factor of 4 to get the uncertainty for the absolute prediction
# this is just an approximation, but it works well enough.
# The uncertainty does not need to be perfect, it merely serves as a
# self-gating mechanism, and the actual value of it is less important
# compared to the relative values between different points.
losses.loss3d_abs = tfu.reduce_mean_masked(
self.my_norm(absdiff_scaled, preds.uncert * 4.),
is_valid_and_far_enough)
# 2D PROJECTION LOSS (pixel-space)
# We also compute a loss in pixel space to encourage good image-alignment in the model.
coords2d_pred = tfu3d.project_pose(preds.coords3d_abs, inps.intrinsics)
coords2d_true = tfu3d.project_pose(inps.coords3d_true, inps.intrinsics)
# Balance factor which considers the 2D image size equivalent to the 3D box size of the
# volumetric heatmap. This is just a factor to get a rough ballpark.
# It could be tuned further.
scale_2d = 1 / FLAGS.proc_side * FLAGS.box_size_m
# We only use the 2D loss for points that are in front of the camera and aren't
# very far out of the field of view. It's not a problem that the point is outside
# to a certain extent, because this will provide training signal to move points which
# are outside the image, toward the image border. Therefore those point predictions
# will gather up near the border and we can mask them out when doing the absolute
# reconstruction.
is_in_fov_pred = tf.logical_and(
tfu3d.is_within_fov(coords2d_pred, border_factor=-20 * (FLAGS.proc_side / 256)),
preds.coords3d_abs[..., 2] > 0.001)
is_near_fov_true = tf.logical_and(
tfu3d.is_within_fov(coords2d_true, border_factor=-20 * (FLAGS.proc_side / 256)),
inps.coords3d_true[..., 2] > 0.001)
losses.loss2d = tfu.reduce_mean_masked(
self.my_norm((coords2d_true - coords2d_pred) * scale_2d, preds.uncert),
tf.logical_and(
is_valid_and_far_enough,
tf.logical_and(is_in_fov_pred, is_near_fov_true)))
return losses, tf.add_n([
losses.loss3d,
losses.loss2d,
FLAGS.absloss_factor * self.stop_grad_before_step(
losses.loss3d_abs, FLAGS.absloss_start_step)])reconstruct_absolute
def adjusted_train_counter(self):
return self.train_counter // FLAGS.grad_accum_steps
def reconstruct_absolute(
self, head2d, head3d, intrinsics, mix_3d_inside_fov, point_validity_mask=None):
return tf.cond(
self.adjusted_train_counter() < 500,
lambda: tfu3d.reconstruct_absolute(
head2d, head3d, intrinsics, mix_3d_inside_fov=mix_3d_inside_fov,
weak_perspective=True, point_validity_mask=point_validity_mask,
border_factor1=1, border_factor2=0.55, mix_based_on_3d=False),
lambda: tfu3d.reconstruct_absolute(
head2d, head3d, intrinsics, mix_3d_inside_fov=mix_3d_inside_fov,
weak_perspective=False, point_validity_mask=point_validity_mask,
border_factor1=1, border_factor2=0.55, mix_based_on_3d=False))1. 功能概述
该函数根据当前训练步数(adjusted_train_counter)选择两种不同的 3D重建策略:
-
训练初期(前500步):使用 弱透视投影(Weak Perspective Projection) 模型,简化计算以稳定训练。
-
训练后期(500步之后):切换为 更精确的投影模型(可能是全透视投影),提升重建精度。
2. 参数详解
| 参数 | 类型/范围 | 说明 |
|---|---|---|
head2d | Tensor | 网络预测的2D坐标(像素空间) |
head3d | Tensor | 网络预测的3D坐标(相对于根关节的偏移量,可能未对齐绝对坐标系) |
intrinsics | Tensor | 相机内参矩阵(用于从3D到2D的投影) |
mix_3d_inside_fov | Float [0,1] | 控制视场内(FOV)点使用3D预测的权重(与2D反投影结果混合) |
point_validity_mask | Tensor (bool) | 标记哪些点是有效的(如过滤掉遮挡点或离群点) |
weak_perspective | bool | 是否使用弱透视投影(True:忽略深度变化;False:使用完整透视投影) |
border_factor1/2 | float | 控制视场边缘的扩展范围(用于判断点是否在图像边界内) |
mix_based_on_3d | bool | 混合策略是否基于3D坐标(若为False,可能基于2D置信度) |
3. 两种重建模式对比
| 特性 | 训练初期(weak_perspective=True) | 训练后期(weak_perspective=False) |
|---|---|---|
| 投影模型 | 弱透视投影(假设物体深度变化可忽略) | 完整透视投影(考虑深度变化) |
| 计算复杂度 | 低(适合训练初期快速收敛) | 高(适合精细优化) |
| 适用场景 | 初始阶段姿态大致对齐 | 需要高精度重建(如关节细节优化) |
| 稳定性 | 对噪声和初始值更鲁棒 | 依赖准确的初始预测 |