1回顾
前面的几章内容探讨了aclgraph运行过程中的涉及到的关键模块和技术。本章节将前面涉及到的模块串联起来,对aclgraph形成一个端到端的了解。
先给出端到端运行的代码,如下:
import torch
import torch_npu
import torchair
import logging
from torchair import logger
logger.setLevel(logging.INFO)
torch._logging.set_logs(dynamo=logging.DEBUG,aot=logging.DEBUG,output_code=True,graph_code=True)
# Patch方式实现集合通信入图(可选)
from torchair import patch_for_hcom
patch_for_hcom()
# 定义模型Model
class Model(torch.nn.Module):
def __init__(self):
super().__init__()
def forward(self, x, y):
return torch.add(x, y)
# 实例化模型model
model = Model().npu()
# 获取TorchAir提供的默认npu backend,自行配置config功能
config = torchair.CompilerConfig()
config.mode = "reduce-overhead"
npu_backend = torchair.get_npu_backend(compiler_config=config) // 关注点1
# 使用npu backend进行compile
opt_model = torch.compile(model, backend=npu_backend) // 关注点2
# 使用编译后的model去执行
x = torch.randn(2, 2).npu()
y = torch.randn(2, 2).npu()
out = opt_model(x, y) // 关注点3
pring(out)
config.mode = "reduce-overhead"配置了aclgraph的模式。该代码在CANN8.1rc1(https://www.hiascend.com/document/detail/zh/canncommercial/81RC1/quickstart/index/index.html),torch_npu插件版本 7.0.0(https://www.hiascend.com/document/detail/zh/Pytorch/700/configandinstg/instg/insg_0004.html)以后的版本上aclgraph模式才得以支持,是可以运行起来的。
关注上述代码的3个主要部分。
2 torchair.get_npu_backend
def get_npu_backend(*, compiler_config: CompilerConfig = None, custom_decompositions: Dict = {}):
if compiler_config is None:
compiler_config = CompilerConfig()
decompositions = get_npu_default_decompositions()
decompositions.update(custom_decompositions)
add_npu_patch(decompositions, compiler_config)
return functools.partial(_npu_backend, compiler_config=compiler_config, decompositions=decompositions)
从Ascend的aclgraph(一)aclgraph是什么?torchair又是怎么成图的?中可知。该函数最终返回的是_npu_backend在固定参数compiler_config和decompositions下返回的一个新的函数。
def _npu_backend(gm: torch.fx.GraphModule, example_inputs: List[torch.Tensor],
compiler_config: CompilerConfig = None, decompositions: Dict = {}):
if compiler_config is None:
compiler_config = CompilerConfig()
compiler = get_compiler(compiler_config)
input_dim_gears = dict()
for i, t in enumerate(example_inputs):
dim_gears = get_dim_gears(t)
if dim_gears is not None:
input_dim_gears[i - len(example_inputs)] = dim_gears
fw_compiler, inference_compiler, joint_compiler = _wrap_compiler(compiler, compiler_config)
fw_compiler = _set_gear_to_compiler(fw_compiler, compiler_config, input_dim_gears)
inference_compiler = _set_gear_to_compiler(inference_compiler, compiler_config, input_dim_gears)
partition_fn = _get_partition_fn(compiler_config)
if compiler_config.experimental_config.aot_config_enable_joint_graph:
output_loss_index = int(compiler_config.experimental_config.aot_config_output_loss_index.value)
return aot_module_simplified_joint(gm, example_inputs,
compiler=joint_compiler, decompositions=decompositions,
output_loss_index=output_loss_index)
keep_inference_input_mutations = bool(compiler_config.experimental_config.keep_inference_input_mutations)
# TO DO: fix me in master
if compiler_config.mode.value == "reduce-overhead":
keep_inference_input_mutations = False
logger.debug(f"To temporarily avoid some precision problem in AclGraph, "
f"keep_inference_input_mutations config is set to {keep_inference_input_mutations}.")
return aot_module_simplified(gm, example_inputs, fw_compiler=fw_compiler, bw_compiler=compiler,
decompositions=decompositions, partition_fn=partition_fn,
keep_inference_input_mutations=keep_inference_input_mutations,
inference_compiler=inference_compiler)
_npu_backend中最终返回的是aot_module_simplified。_npu_backend的解析请参照Ascend的aclgraph(一)aclgraph是什么?torchair又是怎么成图的?和Ascend的aclgraph(二)_npu_backend中还有些什么秘密?。
aot_module_simplified 作用在前文中可知是:通常用于简化将一个 PyTorch 模型准备好进行 AOT 编译的过程,简单理解就是AOT编译前的预操作。
写个示例:
import torch
from torch.compile import aot_module_simplified
# 假设有一个简单的模型
class SimpleModel(torch.nn.Module):
def forward(self, x):
return torch.relu(x)
model = SimpleModel()
# 使用 aot_module_simplified 进行 AOT 编译
compiled_model = aot_module_simplified(model)
# 现在可以使用 compiled_model 进行推理
input_tensor = torch.randn(5)
output_tensor = compiled_model(input_tensor)
print(output_tensor)
在这个示例中,compiled_model 就是经过 aot_module_simplified 编译优化后的模型。你可以像使用普通 PyTorch 模型那样调用它的方法来进行推理。
回到代码中的关注1,那么npu_backend 返回的就是一个可以执行的model对象torch.nn.Module
接着看关注2。
3 torch.compile(model, backend=npu_backend)
通过Ascend的aclgraph(二)_npu_backend中还有些什么秘密?可知backend是一个回调函数(可调用的对象)
def _optimize(
rebuild_ctx: Callable[[], Union[OptimizeContext, _NullDecorator]],
backend="inductor",
*,
nopython=False,
guard_export_fn=None,
guard_fail_fn=None,
disable=False,
dynamic=None,
) -> Union[OptimizeContext, _NullDecorator]:
# 中间代码省略...
return _optimize_catch_errors(
convert_frame.convert_frame(backend, hooks=hooks), // backend,回调函数
hooks,
backend_ctx_ctor,
dynamic=dynamic,
compiler_config=backend.get_compiler_config()
if hasattr(backend, "get_compiler_config")
else None,
rebuild_ctx=rebuild_ctx,
)
# ---------------------------------------------------------------------------------------------------------------------------------------
def _optimize_catch_errors(
compile_fn,
hooks: Hooks,
backend_ctx_ctor=null_context,
export=False,
dynamic=None,
compiler_config=None,
rebuild_ctx=None,
):
return OptimizeContext(
convert_frame.catch_errors_wrapper(compile_fn, hooks), // 回调函数
backend_ctx_ctor=backend_ctx_ctor,
first_ctx=True,
export=export,
dynamic=dynamic,
compiler_config=compiler_config,
rebuild_ctx=rebuild_ctx,
)
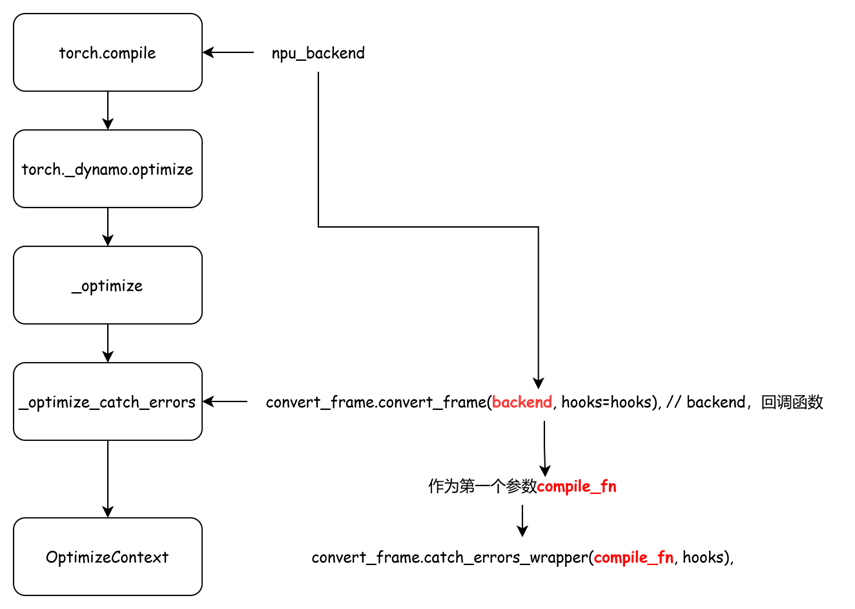
上述这些 ,都是pytorch代码中的标准流程。在npu上却有些不一样。
3.1 npu上的torch._dynamo.optimize
首先还是从代码torch.compile开始
def compile(model: Optional[Callable] = None, *, # Module/function to optimize
fullgraph: builtins.bool = False, #If False (default), torch.compile attempts to discover compileable regions in the function that it will optimize. If True, then we require that the entire function be capturable into a single graph. If this is not possible (that is, if there are graph breaks), then this will raise an error.
dynamic: Optional[builtins.bool] = None, # dynamic shape
backend: Union[str, Callable] = "inductor", # backend to be used
mode: Union[str, None] = None, # Can be either "default", "reduce-overhead", "max-autotune" or "max-autotune-no-cudagraphs"
options: Optional[Dict[str, Union[str, builtins.int, builtins.bool]]] = None, # A dictionary of options to pass to the backend. Some notable ones to try out are
disable: builtins.bool = False) # Turn torch.compile() into a no-op for testing
-> Callable:
# 中间代码省略...
return torch._dynamo.optimize(backend=backend, nopython=fullgraph, dynamic=dynamic, disable=disable)(model)
compile中调用的是torch._dynamo.optimize函数。而npu上的torch._dynamo.optimize是被重新赋值的。
函数调用流程如下:
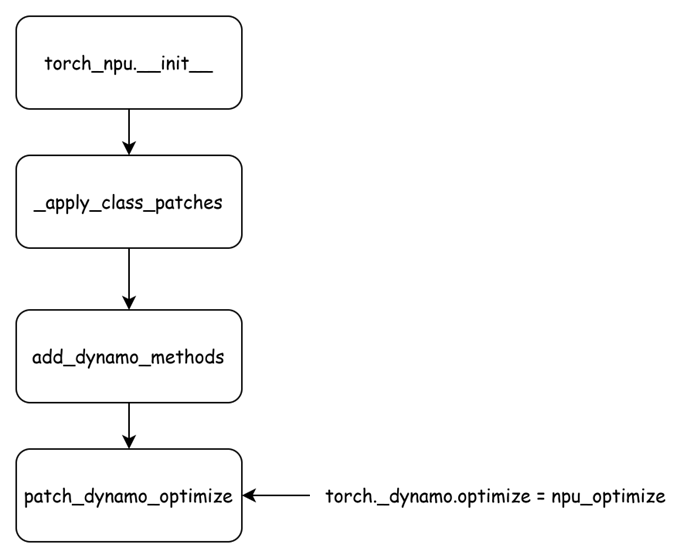
def patch_dynamo_optimize():
src_optimize = optimize
def npu_optimize(*args, **kwargs):
backend = None
if 'backend' in kwargs.keys():
backend = kwargs['backend']
elif len(args) == 1:
backend = args[0]
backend_name = None
if isinstance(backend, str):
backend_name = backend
elif isinstance(backend, _TorchCompileWrapper):
backend_name = backend.compiler_name
if backend_name == 'npu':
# Init torchair ahead of running model.
_get_global_npu_backend()
return src_optimize(*args, **kwargs)
torch._dynamo.optimize = npu_optimize
可以看到,torch._dynamo.optimize = npu_optimize已经被重新赋值了。依旧从代码的角度,看下是如何一步步执行下去的。
_get_global_npu_backend返回的是torchair.get_npu_backend()获取的对象,和关注点1加粗样式调用的接口相同,但是这里却是没有传入congfig参数,一切都是默认的。
def _get_global_npu_backend():
global _global_npu_backend
if _global_npu_backend is not None:
return _global_npu_backend
if 'torchair' not in sys.modules:
raise AssertionError("Could not find module torchair. "
"Please check if torchair is removed from sys.modules." + pta_error(ErrCode.NOT_FOUND))
import torchair
_global_npu_backend = torchair.get_npu_backend()
return _global_npu_backend
接下来调用的函数是src_optimize,而src_optimize是通过_dynamo.py中的optimize赋值的。
src_optimize = optimize
看下完整的optimize函数
def optimize(
backend="inductor",
*,
nopython=False,
guard_export_fn=None,
guard_fail_fn=None,
disable=False,
dynamic=None,
):
"""
The main entrypoint of TorchDynamo. Do graph capture and call
backend() to optimize extracted graphs.
Args:
backend: One of the two things:
- Either, a function/callable taking a torch.fx.GraphModule and
example_inputs and returning a python callable that runs the
graph faster.
One can also provide additional context for the backend, like
torch.jit.fuser("fuser2"), by setting the backend_ctx_ctor attribute.
See AOTAutogradMemoryEfficientFusionWithContext for the usage.
- Or, a string backend name in `torch._dynamo.list_backends()`
nopython: If True, graph breaks will be errors and there will
be a single whole-program graph.
disable: If True, turn this decorator into a no-op
dynamic: If True, upfront compile as dynamic a kernel as possible. If False,
disable all dynamic shapes support (always specialize). If None, automatically
detect when sizes vary and generate dynamic kernels upon recompile.
Example Usage::
@torch._dynamo.optimize()
def toy_example(a, b):
...
"""
其中backend的注释
backend:可以是以下两种情况之一:
- 要么,它是一个函数或可调用对象,接收一个 torch.fx.GraphModule 和 example_inputs,并返回一个能够更快执行该计算图的 Python 可调用对象。
你也可以通过设置 backend_ctx_ctor 属性,为 backend 提供额外的上下文信息,例如:torch.jit.fuser(“fuser2”)。
使用方式请参见:AOTAutogradMemoryEfficientFusionWithContext。- 要么,它是一个字符串,表示后端名称,这个名称必须在 torch._dynamo.list_backends() 返回的列表中。
当前npu下,属于第一种情况的backend。补充完整调用栈:
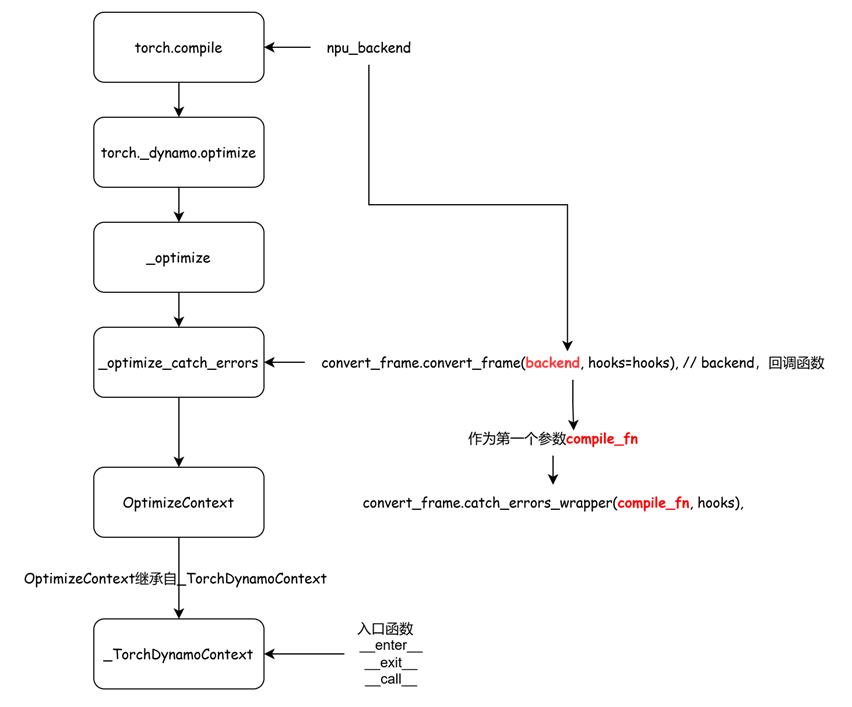
optimize最终使能到的对象是_TorchDynamoContext。
torch._dynamo.optimize的流程就走完了。再回到
return torch._dynamo.optimize(backend=backend, nopython=fullgraph, dynamic=dynamic, disable=disable)(model)
关注最后一个参数model,意思也就是给_TorchDynamoContext传入参数model,会触发调用_TorchDynamoContext的__call__方法。由于例子中的Model()是个fn, torch.nn.Module对象,因此走到下面的代码分支
... 省略
if isinstance(fn, torch.nn.Module):
mod = fn
new_mod = OptimizedModule(mod, self)
# Save the function pointer to find the original callable while nesting
# of decorators.
new_mod._torchdynamo_orig_callable = mod.forward
# when compiling torch.nn.Module,
# provide public api OptimizedModule.get_compiler_config()
assert not hasattr(new_mod, "get_compiler_config")
new_mod.get_compiler_config = get_compiler_config
return new_mod
... 省略
返回的是一个OptimizedModule实例对象。
new_mod = OptimizedModule(mod, self)
特别要注意OptimizedModule对象,实例创建的过程其实包含一段执行逻辑,先看流程图
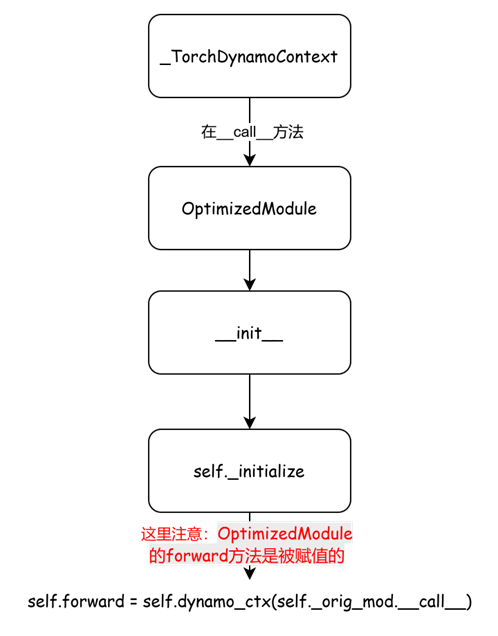
再给出代码:
class OptimizedModule(torch.nn.Module):
"""
Wraps the original nn.Module object and later patches its
forward method to optimized self.forward method.
"""
_torchdynamo_orig_callable: Callable[..., Any]
get_compiler_config: Callable[[], Any]
def __init__(self, mod: torch.nn.Module, dynamo_ctx):
super().__init__()
# Installs the params/buffer
self._orig_mod = mod
self.dynamo_ctx = dynamo_ctx
self._initialize()
def _initialize(self):
# Do this stuff in constructor to lower overhead slightly
if isinstance(self._orig_mod.forward, types.MethodType) and trace_rules.check(
self._orig_mod.forward
):
# This may be a torch.nn.* instance in trace_rules.py which
# won't trigger a frame evaluation workaround to add an extra
# frame we can capture
self.forward = self.dynamo_ctx(external_utils.wrap_inline(self._orig_mod))
else:
# Invoke hooks outside of dynamo then pickup the inner frame
self.forward = self.dynamo_ctx(self._orig_mod.__call__)
if hasattr(self._orig_mod, "_initialize_hook"):
self._forward = self.forward
self.forward = self._call_lazy_check
而self.forward = self.dynamo_ctx(self._orig_mod.__call__)这行代码会去执行_TorchDynamoContext原的__call__函数的,逻辑是如下。
OptimizedModule的构造函数种,mod就是传入的mode对象,而dynamo_ctx是_TorchDynamoContext。
self._orig_mod = mod
self.dynamo_ctx = dynamo_ctx
那么self.dynamo_ctx(self._orig_mod.__call__),意思也就是调用_TorchDynamoContext的
__call__函数,然后参数是mode的__call__对象。
也就是说,_TorchDynamoContext的__call__函数被执行了2遍。最终__call__函数返回的是_fn函数。
@functools.wraps(fn)
def _fn(*args, **kwargs):
if is_fx_tracing():
if config.error_on_nested_fx_trace:
raise RuntimeError(
"Detected that you are using FX to symbolically trace "
"a dynamo-optimized function. This is not supported at the moment."
)
else:
return fn(*args, **kwargs)
if is_jit_tracing():
if config.error_on_nested_jit_trace:
raise RuntimeError(
"Detected that you are using FX to torch.jit.trace "
"a dynamo-optimized function. This is not supported at the moment."
)
else:
return fn(*args, **kwargs)
cleanups = [enter() for enter in self.enter_exit_hooks]
prior = set_eval_frame(callback)
try:
return fn(*args, **kwargs)
finally:
set_eval_frame(prior)
for cleanup in cleanups:
cleanup()
always_optimize_code_objects[fn.__code__] = True
... 省略 ...
return _fn
读到这里,也就是说torch.compile返回的就是_fn函数。
4 opt_model(x, y)
现在走到关注点3,到模型执行部分,调用的是_fn函数,
@functools.wraps(fn)
def _fn(*args, **kwargs):
if is_fx_tracing():
if config.error_on_nested_fx_trace:
raise RuntimeError(
"Detected that you are using FX to symbolically trace "
"a dynamo-optimized function. This is not supported at the moment."
)
else:
return fn(*args, **kwargs)
if is_jit_tracing():
if config.error_on_nested_jit_trace:
raise RuntimeError(
"Detected that you are using FX to torch.jit.trace "
"a dynamo-optimized function. This is not supported at the moment."
)
else:
return fn(*args, **kwargs)
cleanups = [enter() for enter in self.enter_exit_hooks]
prior = set_eval_frame(callback)
try:
return fn(*args, **kwargs)
finally:
set_eval_frame(prior)
for cleanup in cleanups:
cleanup()
函数种fn是 Model对象
<bound method Module._wrapped_call_impl of Model()>
接下来执行的时候,会触发回调函数的调用。具体是如何触发的呢?
首先是:prior = set_eval_frame(callback),这句代码的意思,就是给frame设置了callback函数,该callback函数是convert_frame.convert_frame(backend, hooks=hooks),具体参见:Ascend的aclgraph(三)TorchDynamo。
4.1 设置set_eval_frame的callback
set_eval_frame是个pybind函数,最终执行调用的是c++(pytorch/torch/csrc/dynamo
/eval_frame.c)的是set_eval_frame函数,
static PyObject* set_eval_frame(
PyObject* new_callback,
PyThreadState* tstate,
PyObject* module) {
// Change the eval frame callback and return the old one
// - None: disables TorchDynamo
// - False: run-only mode (reuse existing compiles)
// - Python callable(): enables TorchDynamo
PyObject* old_callback = eval_frame_callback_get();
// owned by caller
Py_INCREF(old_callback);
if (old_callback != Py_None && new_callback == Py_None) {
decrement_working_threads(tstate, module);
} else if (old_callback == Py_None && new_callback != Py_None) {
increment_working_threads(tstate, module);
}
Py_INCREF(new_callback);
Py_DECREF(old_callback);
// Set thread local callback. This will drive behavior of our shim, if/when it
// is installed.
eval_frame_callback_set(new_callback);
return old_callback;
}
接着调用eval_frame_callback_set,
void eval_frame_callback_set(PyObject* obj) {
PyThread_tss_set(&eval_frame_callback_key, obj);
}
PyThread_tss_set可以认为是eval_frame_callback_key是key,obj是value。eval_frame_callback_key是个静态全局变量。
4.2 执行fn(*args, **kwargs)
Ascend的aclgraph(三)TorchDynamo中有提到,通过 CPython 提供的_PyInterpreterState_SetEvalFrameFunc()函数把CPython中用于执行字节码的默认函数给替换为custom_eval_frame_shim()。 在执行用户想要编译的函数时便会进入_custom_eval_frame_shim().
注意:小编看看的的代码中是dynamo_custom_eval_frame_shim(因为版本原因,小编是最新的main分支)。整体逻辑如下:
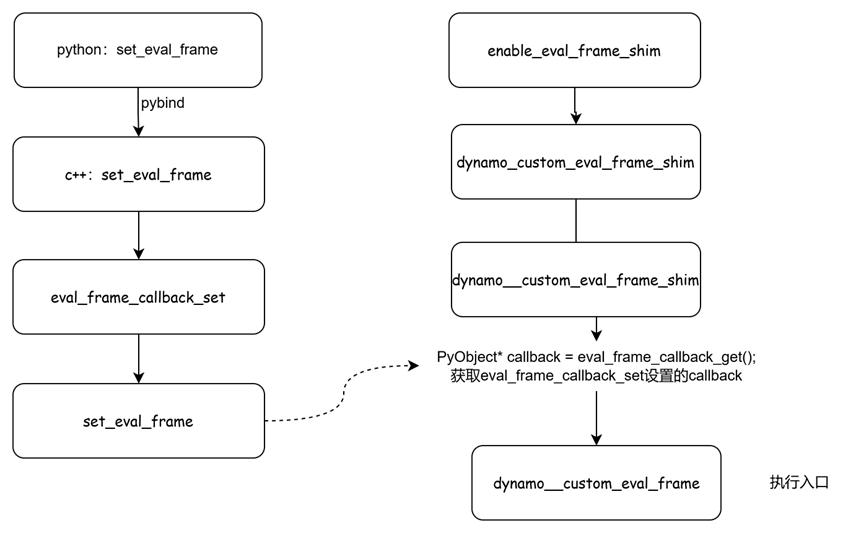
最终调用执行的函数就是dynamo__custom_eval_frame。该函数在https://github.com/pytorch/pytorch/blob/main/torch/csrc/dynamo/eval_frame_cpp.cpp中实现,如下:
/ frame and callback are borrowed references.
// Returns new reference.
PyObject* dynamo__custom_eval_frame(
PyThreadState* tstate,
THP_EVAL_API_FRAME_OBJECT* frame,
int throw_flag,
PyObject* callback_py) {
#if IS_PYTHON_3_11_PLUS
DEBUG_TRACE(
"begin %s %s %i %i",
get_frame_name(frame),
PyUnicode_AsUTF8(F_CODE(frame)->co_filename),
F_CODE(frame)->co_firstlineno,
_PyInterpreterFrame_LASTI(frame));
#else
DEBUG_TRACE(
"begin %s %s %i %i %i",
get_frame_name(frame),
PyUnicode_AsUTF8(F_CODE(frame)->co_filename),
frame->f_lineno,
frame->f_lasti,
frame->f_iblock);
#endif
if (throw_flag) {
// When unwinding generators, eval frame is called with throw_flag ==
// true. Frame evaluation is supposed to continue unwinding by propagating
// the exception. Dynamo doesn't really know how to do this, nor does it
// really want to do this, because there's unlikely any code to capture
// (you're going to immediately quit out of the frame, perhaps running
// some unwinding logic along the way). So we just run the default
// handler in this case.
//
// NB: A previous version of this patch returned NULL. This is wrong,
// because returning NULL is *different* from unwinding an exception.
// In particular, you will not execute things like context manager
// __exit__ if you just return NULL.
//
// NB: It's /conceivable/ that you might want to actually still call the
// Dynamo callback when throw_flag == TRUE, to give Dynamo a chance to
// do any stack unwinding code. But this is not really useful because
// (1) Dynamo doesn't actually know how to do stack unwinding, so it would
// immediately skip the frame, and (2) even if it did, this would only
// be profitable if there was tensor code in the unwinding code. Seems
// unlikely.
DEBUG_TRACE("throw %s", get_frame_name(frame));
return dynamo_eval_frame_default(tstate, frame, throw_flag);
}
py::handle callback(callback_py);
// callback to run on recursively invoked frames
py::handle recursive_callback = callback; // borrowed
PyCodeObject* cached_code = nullptr; // borrowed
const char* trace_annotation = "";
PyObject* eval_result = nullptr; // strong reference
// exit functions
auto eval_default = [&]() {
eval_frame_callback_set(recursive_callback.ptr());
eval_result = dynamo_eval_frame_default(tstate, frame, throw_flag);
if (!callback.is(recursive_callback)) {
// NB: Only set the callback if it's different than the recursive
// callback! Setting the callback is dangerous in the case that `frame`
// also sets the eval frame callback. This happens in some functions in
// eval_frame.py. These functions should be skipped with DEFAULT recursive
// action, so we won't accidentally overwrite the callback.
eval_frame_callback_set(callback.ptr());
}
};
// NOTE: In 3.12+, the frame evaluation function (callee) is responsible for
// clearing/popping the frame, meaning that unless we default evaluate the
// original frame, we are responsible for clearing it - via
// clear_old_frame_if_python_312_plus.
auto eval_custom = [&]() {
eval_frame_callback_set(recursive_callback.ptr());
DEBUG_NULL_CHECK(cached_code);
eval_result = dynamo_eval_custom_code(
tstate, frame, cached_code, trace_annotation, throw_flag);
if (!callback.is(recursive_callback)) {
eval_frame_callback_set(callback.ptr());
}
clear_old_frame_if_python_312_plus(tstate, frame);
};
auto fail = [&]() { clear_old_frame_if_python_312_plus(tstate, frame); };
ExtraState* extra = get_extra_state(F_CODE(frame));
if (callback.is(py::bool_(false)) && extra == nullptr) {
DEBUG_TRACE("skip (run only with empty cache) %s", get_frame_name(frame));
eval_default();
return eval_result;
}
// create cache
if (extra == nullptr) {
extra = init_and_set_extra_state(F_CODE(frame));
}
// Get recursive action
FrameExecStrategy strategy = extra_state_get_exec_strategy(extra);
recursive_callback =
_callback_from_action(recursive_callback, strategy.recursive_action);
// Skip this frame
if (strategy.cur_action == SKIP) {
DEBUG_TRACE("skip %s", get_frame_name(frame));
eval_default();
return eval_result;
}
// default and run-only mode require guard eval
std::unique_ptr<FrameLocalsMapping> locals =
std::make_unique<FrameLocalsMapping>(frame);
PyObject* backend = get_backend(callback.ptr()); // borrowed
// We don't run the current custom_eval_frame behavior for guards.
// So we temporarily set the callback to Py_None to drive the correct behavior
// in the shim.
eval_frame_callback_set(Py_None);
DEBUG_CHECK(PyDict_CheckExact(frame->f_globals));
DEBUG_CHECK(PyDict_CheckExact(frame->f_builtins));
_PytorchRecordFunctionState* rf =
_pytorch_record_function_enter(cache_lookup_profiler_str);
PyObject* maybe_cached_code = nullptr;
lookup(
extra,
locals.get(),
backend,
&maybe_cached_code,
&trace_annotation,
is_skip_guard_eval_unsafe);
_pytorch_record_function_exit(rf);
// A callback of Py_False indicates "run only" mode, the cache is checked,
// but we never compile.
bool run_only =
strategy.cur_action == RUN_ONLY || callback.is(py::bool_(false));
if (run_only) {
DEBUG_TRACE("In run only mode %s", get_frame_name(frame));
}
if (maybe_cached_code == nullptr) {
// guard eval failed, keep propagating
fail();
return eval_result;
} else if (maybe_cached_code != Py_None) {
cached_code = (PyCodeObject*)maybe_cached_code;
// used cached version
DEBUG_TRACE("cache hit %s", get_frame_name(frame));
eval_custom();
return eval_result;
}
// cache miss
DEBUG_TRACE("cache miss %s", get_frame_name(frame));
if (is_skip_guard_eval_unsafe) {
PyErr_SetString(
PyExc_RuntimeError,
"Recompilation triggered with skip_guard_eval_unsafe stance. "
"This usually means that you have not warmed up your model "
"with enough inputs such that you can guarantee no more recompilations.");
fail();
return eval_result;
}
if (run_only) {
eval_default();
return eval_result;
}
// call callback
CacheEntry* cache_entry = extract_cache_entry(extra);
FrameState* frame_state = extract_frame_state(extra);
py::object callback_result;
FrameExecStrategy new_strategy;
bool apply_to_code = false;
PyObject* guarded_code = nullptr;
try {
callback_result = dynamo_call_callback(
callback, frame, locals.get(), cache_entry, frame_state);
new_strategy =
callback_result.attr("frame_exec_strategy").cast<FrameExecStrategy>();
apply_to_code = callback_result.attr("apply_to_code").cast<bool>();
guarded_code = callback_result.attr("guarded_code").ptr();
} catch (py::error_already_set& e) {
// internal exception, returning here will leak the exception into user
// code this is useful for debugging -- but we dont want it to happen
// outside of testing NB: we intentionally DO NOT re-enable custom
// behavior to prevent cascading failure from internal exceptions. The
// upshot is if Dynamo barfs, that's it for Dynamo, even if you catch the
// exception inside the torch.compile block we won't try to Dynamo
// anything else.
fail();
e.restore();
return eval_result;
}
// recursive frame action
if (strategy.recursive_action == DEFAULT) {
// old recursive action overrides new recursive action
recursive_callback = _callback_from_action(
recursive_callback, new_strategy.recursive_action);
}
// possibly apply frame strategy to future frames with same code object
if (apply_to_code) {
if (new_strategy.cur_action != DEFAULT) {
DEBUG_TRACE("create action: %d\n", new_strategy.cur_action);
}
if (new_strategy.recursive_action != DEFAULT) {
DEBUG_TRACE(
"create recursive action: %d\n", new_strategy.recursive_action);
}
extra_state_set_exec_strategy(extra, new_strategy);
}
if (guarded_code != Py_None) {
DEBUG_TRACE("create cache %s", get_frame_name(frame));
// NB: We could use extract_cache_entry to get the cache_entry, but
// extract_cache_entry returns a borrowed reference. Modifying a borrowed
// reference seems wrong. Therefore, we directly access the
// extra->cache_entry. extra wont be NULL here.
CacheEntry* new_cache_entry =
create_cache_entry(extra, guarded_code, backend);
// Update the existing cache_entry on the extra object. This extra object
// is sitting on the extra scratch space, we are just changing the
// cache_entry ptr. As a result, extra now becomes the owner of CacheEntry
// object. This will be cleaned up when set_extra_state is called.
// Re-enable custom behavior
cached_code = CacheEntry_get_code(new_cache_entry),
trace_annotation = CacheEntry_get_trace_annotation(new_cache_entry);
eval_custom();
} else {
eval_default();
}
return eval_result;
}
整个函数很长,但基本逻辑与Ascend的aclgraph(三)TorchDynamo中讲的一样,这里引用过来:
在_custom_eval_frame函数中,会先通过lookup函数检查cache中是否有已编译代码,若存在则直接调用eval_custom_code函数执行,从而避免重复编译相同函数。若cache未命中,则通过call_callback调用回调函数进行编译,并通过set_extra()将编译结果保存在PyFrameObject中,最后调用eval_custom_code继续进行执行。而这里的回调函数也即前面在torch._dynamo.optimize传入的回调函数:convert_frame.convert_frame(backend, hooks=hooks)(包含编译入口compile_fn)。
打开日志可以看到具体的编译过程。
V0515 09:03:05.795000 281473434236992 torch/_dynamo/convert_frame.py:254] skipping because no torch.* dispatch_call /usr/local/python3.10.17/lib/python3.10/bdb.py 118
V0515 09:03:05.795000 281473434236992 torch/_dynamo/convert_frame.py:254] skipping because no torch.* break_anywhere /usr/local/python3.10.17/lib/python3.10/bdb.py 251
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] torchdynamo start compiling forward /home/torchair/test.py:19, stack (elided 5 frames):
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] File "/home/torchair/test.py", line 37, in <module>
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] print(opt_model(x, y))
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] File "/usr/local/python3.10.17/lib/python3.10/site-packages/torch/nn/modules/module.py", line 1532, in _wrapped_call_impl
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] return self._call_impl(*args, **kwargs)
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] File "/usr/local/python3.10.17/lib/python3.10/site-packages/torch/nn/modules/module.py", line 1541, in _call_impl
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] return forward_call(*args, **kwargs)
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] File "/usr/local/python3.10.17/lib/python3.10/site-packages/torch/_dynamo/eval_frame.py", line 451, in _fn
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] return fn(*args, **kwargs)
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] File "/usr/local/python3.10.17/lib/python3.10/site-packages/torch/nn/modules/module.py", line 1532, in _wrapped_call_impl
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] return self._call_impl(*args, **kwargs)
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] File "/usr/local/python3.10.17/lib/python3.10/site-packages/torch/nn/modules/module.py", line 1541, in _call_impl
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0] return forward_call(*args, **kwargs)
V0515 09:03:05.802000 281473434236992 torch/_dynamo/convert_frame.py:652] [0/0]
I0515 09:03:05.806000 281473434236992 torch/_dynamo/logging.py:55] [0/0] Step 1: torchdynamo start tracing forward /home/torchair/test.py:19
V0515 09:03:05.809000 281473434236992 torch/fx/experimental/symbolic_shapes.py:1980] [0/0] create_env
V0515 09:03:05.814000 281473434236992 torch/_dynamo/symbolic_convert.py:699] [0/0] [__trace_source] TRACE starts_line /home/torchair/test.py:19 in forward (Model.forward)
V0515 09:03:05.814000 281473434236992 torch/_dynamo/symbolic_convert.py:699] [0/0] [__trace_source] def forward(self, x, y):
V0515 09:03:07.619000 281473434236992 torch/_dynamo/symbolic_convert.py:699] [0/0] [__trace_source] TRACE starts_line /home/torchair/test.py:20 in forward (Model.forward)
V0515 09:03:07.619000 281473434236992 torch/_dynamo/symbolic_convert.py:699] [0/0] [__trace_source] return torch.add(x, y)
V0515 09:03:07.620000 281473434236992 torch/_dynamo/symbolic_convert.py:725] [0/0] TRACE LOAD_GLOBAL torch []
V0515 09:03:07.622000 281473434236992 torch/_dynamo/symbolic_convert.py:725] [0/0] TRACE LOAD_ATTR add [PythonModuleVariable(<module 'torch' from '/usr/local/python3.10.17/lib/python3.10/site-packages/torch/__init__.py'>)]
V0515 09:03:07.625000 281473434236992 torch/_dynamo/symbolic_convert.py:725] [0/0] TRACE LOAD_FAST x [TorchInGraphFunctionVariable(<built-in method add of type object at 0xffffa30bf048>)]
V0515 09:03:07.625000 281473434236992 torch/_dynamo/symbolic_convert.py:725] [0/0] TRACE LOAD_FAST y [TorchInGraphFunctionVariable(<built-in method add of type object at 0xffffa30bf048>), LazyVariableTracker()]
V0515 09:03:07.626000 281473434236992 torch/_dynamo/symbolic_convert.py:725] [0/0] TRACE CALL_FUNCTION 2 [TorchInGraphFunctionVariable(<built-in method add of type object at 0xffffa30bf048>), LazyVariableTracker(), LazyVariableTracker()]
V0515 09:03:07.627000 281473434236992 torch/_dynamo/output_graph.py:1959] [0/0] create_graph_input L_x_ L['x']
V0515 09:03:07.629000 281473434236992 torch/_dynamo/variables/builder.py:1873] [0/0] wrap_to_fake L['x'] (2, 2) StatefulSymbolicContext(dynamic_sizes=[<DimDynamic.STATIC: 2>, <DimDynamic.STATIC: 2>], constraint_sizes=[None, None], view_base_context=None, tensor_source=LocalSource(local_name='x', cell_or_freevar=False), shape_env_to_source_to_symbol_cache={}) <class 'torch.Tensor'>
V0515 09:03:07.635000 281473434236992 torch/_dynamo/output_graph.py:1959] [0/0] create_graph_input L_y_ L['y']
V0515 09:03:07.636000 281473434236992 torch/_dynamo/variables/builder.py:1873] [0/0] wrap_to_fake L['y'] (2, 2) StatefulSymbolicContext(dynamic_sizes=[<DimDynamic.STATIC: 2>, <DimDynamic.STATIC: 2>], constraint_sizes=[None, None], view_base_context=None, tensor_source=LocalSource(local_name='y', cell_or_freevar=False), shape_env_to_source_to_symbol_cache={}) <class 'torch.Tensor'>
V0515 09:03:07.645000 281473434236992 torch/_dynamo/symbolic_convert.py:725] [0/0] TRACE RETURN_VALUE None [TensorVariable()]
I0515 09:03:07.645000 281473434236992 torch/_dynamo/logging.py:55] [0/0] Step 1: torchdynamo done tracing forward (RETURN_VALUE)
V0515 09:03:07.646000 281473434236992 torch/_dynamo/symbolic_convert.py:2267] [0/0] RETURN_VALUE triggered compile
V0515 09:03:07.646000 281473434236992 torch/_dynamo/output_graph.py:871] [0/0] COMPILING GRAPH due to GraphCompileReason(reason='return_value', user_stack=[<FrameSummary file /home/torchair/test.py, line 20 in forward>], graph_break=False)
V0515 09:03:07.649000 281473434236992 torch/_dynamo/output_graph.py:1157] [0/0] [__graph_code] TRACED GRAPH
V0515 09:03:07.649000 281473434236992 torch/_dynamo/output_graph.py:1157] [0/0] [__graph_code] ===== __compiled_fn_0 =====
V0515 09:03:07.649000 281473434236992 torch/_dynamo/output_graph.py:1157] [0/0] [__graph_code] /usr/local/python3.10.17/lib/python3.10/site-packages/torch/fx/_lazy_graph_module.py class GraphModule(torch.nn.Module):
V0515 09:03:07.649000 281473434236992 torch/_dynamo/output_graph.py:1157] [0/0] [__graph_code] def forward(self, L_x_ : torch.Tensor, L_y_ : torch.Tensor):
V0515 09:03:07.649000 281473434236992 torch/_dynamo/output_graph.py:1157] [0/0] [__graph_code] l_x_ = L_x_
V0515 09:03:07.649000 281473434236992 torch/_dynamo/output_graph.py:1157] [0/0] [__graph_code] l_y_ = L_y_
V0515 09:03:07.649000 281473434236992 torch/_dynamo/output_graph.py:1157] [0/0] [__graph_code]
V0515 09:03:07.649000 281473434236992 torch/_dynamo/output_graph.py:1157] [0/0] [__graph_code] # File: /home/torchair/test.py:20 in forward, code: return torch.add(x, y)
V0515 09:03:07.649000 281473434236992 torch/_dynamo/output_graph.py:1157] [0/0] [__graph_code] add = torch.add(l_x_, l_y_); l_x_ = l_y_ = None
V0515 09:03:07.649000 281473434236992 torch/_dynamo/output_graph.py:1157] [0/0] [__graph_code] return (add,)
V0515 09:03:07.649000 281473434236992 torch/_dynamo/output_graph.py:1157] [0/0] [__graph_code]
V0515 09:03:07.649000 281473434236992 torch/_dynamo/output_graph.py:1157] [0/0] [__graph_code]
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph] Tabulate module missing, please install tabulate to log the graph in tabular format, logging code instead:
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph] TRACED GRAPH
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph] ===== __compiled_fn_0 =====
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph] /usr/local/python3.10.17/lib/python3.10/site-packages/torch/fx/_lazy_graph_module.py class GraphModule(torch.nn.Module):
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph] def forward(self, L_x_ : torch.Tensor, L_y_ : torch.Tensor):
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph] l_x_ = L_x_
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph] l_y_ = L_y_
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph]
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph] # File: /home/torchair/test.py:20 in forward, code: return torch.add(x, y)
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph] add = torch.add(l_x_, l_y_); l_x_ = l_y_ = None
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph] return (add,)
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph]
V0515 09:03:07.653000 281473434236992 torch/_dynamo/output_graph.py:1163] [0/0] [__graph]
V0515 09:03:07.656000 281473434236992 torch/_dynamo/output_graph.py:1164] [0/0] [__graph_sizes] TRACED GRAPH TENSOR SIZES
V0515 09:03:07.656000 281473434236992 torch/_dynamo/output_graph.py:1164] [0/0] [__graph_sizes] ===== __compiled_fn_0 =====
V0515 09:03:07.656000 281473434236992 torch/_dynamo/output_graph.py:1164] [0/0] [__graph_sizes] l_x_: (2, 2)
V0515 09:03:07.656000 281473434236992 torch/_dynamo/output_graph.py:1164] [0/0] [__graph_sizes] l_y_: (2, 2)
V0515 09:03:07.656000 281473434236992 torch/_dynamo/output_graph.py:1164] [0/0] [__graph_sizes] add: (2, 2)
V0515 09:03:07.656000 281473434236992 torch/_dynamo/output_graph.py:1164] [0/0] [__graph_sizes]
I0515 09:03:07.658000 281473434236992 torch/_dynamo/logging.py:55] [0/0] Step 2: calling compiler function functools.partial(<function _npu_backend at 0xfffddf6fedd0>, compiler_config=<torchair.configs.compiler_config.CompilerConfig object at 0xffffa3937e50>, decompositions={<OpOverload(op='npu_define.allgather', overload='default')>: <function allgather_decomposition at 0xfffddf03f130>, <OpOverload(op='_c10d_functional.all_to_all_single', overload='default')>: <function decomp_c10d_functional_all_to_all_single at 0xfffddf731510>})
I0515 09:03:07.717000 281473434236992 torch/_functorch/_aot_autograd/dispatch_and_compile_graph.py:109] [0/0] [__aot_graphs] TRACED GRAPH
I0515 09:03:07.717000 281473434236992 torch/_functorch/_aot_autograd/dispatch_and_compile_graph.py:109] [0/0] [__aot_graphs] ===== Forward graph 0 =====
I0515 09:03:07.717000 281473434236992 torch/_functorch/_aot_autograd/dispatch_and_compile_graph.py:109] [0/0] [__aot_graphs] /usr/local/python3.10.17/lib/python3.10/site-packages/torch/fx/_lazy_graph_module.py class <lambda>(torch.nn.Module):
I0515 09:03:07.717000 281473434236992 torch/_functorch/_aot_autograd/dispatch_and_compile_graph.py:109] [0/0] [__aot_graphs] def forward(self, arg0_1: "f32[2, 2]", arg1_1: "f32[2, 2]"):
I0515 09:03:07.717000 281473434236992 torch/_functorch/_aot_autograd/dispatch_and_compile_graph.py:109] [0/0] [__aot_graphs] # File: /home/torchair/test.py:20 in forward, code: return torch.add(x, y)
I0515 09:03:07.717000 281473434236992 torch/_functorch/_aot_autograd/dispatch_and_compile_graph.py:109] [0/0] [__aot_graphs] add: "f32[2, 2]" = torch.ops.aten.add.Tensor(arg0_1, arg1_1); arg0_1 = arg1_1 = None
I0515 09:03:07.717000 281473434236992 torch/_functorch/_aot_autograd/dispatch_and_compile_graph.py:109] [0/0] [__aot_graphs] return (add,)
I0515 09:03:07.717000 281473434236992 torch/_functorch/_aot_autograd/dispatch_and_compile_graph.py:109] [0/0] [__aot_graphs]
I0515 09:03:07.717000 281473434236992 torch/_functorch/_aot_autograd/dispatch_and_compile_graph.py:109] [0/0] [__aot_graphs]
[INFO] TORCHAIR(9569,python):2025-05-15 09:03:07.720.050 [npu_fx_compiler.py:324]9569 compiler inputs
[INFO] TORCHAIR(9569,python):2025-05-15 09:03:07.720.361 [npu_fx_compiler.py:326]9569 input 0: FakeTensor(..., device='npu:0', size=(2, 2))
[INFO] TORCHAIR(9569,python):2025-05-15 09:03:07.720.982 [npu_fx_compiler.py:326]9569 input 1: FakeTensor(..., device='npu:0', size=(2, 2))
[INFO] TORCHAIR(9569,python):2025-05-15 09:03:07.721.521 [npu_fx_compiler.py:327]9569 graph: graph():
%arg0_1 : [num_users=1] = placeholder[target=arg0_1]
%arg1_1 : [num_users=1] = placeholder[target=arg1_1]
%add : [num_users=1] = call_function[target=torch.ops.aten.add.Tensor](args = (%arg0_1, %arg1_1), kwargs = {})
return (add,)
I0515 09:03:07.745000 281473434236992 torch/_dynamo/logging.py:55] [0/0] Step 2: done compiler function functools.partial(<function _npu_backend at 0xfffddf6fedd0>, compiler_config=<torchair.configs.compiler_config.CompilerConfig object at 0xffffa3937e50>, decompositions={<OpOverload(op='npu_define.allgather', overload='default')>: <function allgather_decomposition at 0xfffddf03f130>, <OpOverload(op='_c10d_functional.all_to_all_single', overload='default')>: <function decomp_c10d_functional_all_to_all_single at 0xfffddf731510>})
I0515 09:03:07.753000 281473434236992 torch/fx/experimental/symbolic_shapes.py:2806] [0/0] produce_guards
V0515 09:03:07.754000 281473434236992 torch/fx/experimental/symbolic_shapes.py:2988] [0/0] track_symint L['x'].size()[0] 2 None
V0515 09:03:07.754000 281473434236992 torch/fx/experimental/symbolic_shapes.py:2988] [0/0] track_symint L['x'].size()[1] 2 None
V0515 09:03:07.754000 281473434236992 torch/fx/experimental/symbolic_shapes.py:2988] [0/0] track_symint L['x'].stride()[0] 2 None
V0515 09:03:07.755000 281473434236992 torch/fx/experimental/symbolic_shapes.py:2988] [0/0] track_symint L['x'].stride()[1] 1 None
V0515 09:03:07.755000 281473434236992 torch/fx/experimental/symbolic_shapes.py:2988] [0/0] track_symint L['x'].storage_offset() 0 None
V0515 09:03:07.756000 281473434236992 torch/fx/experimental/symbolic_shapes.py:2988] [0/0] track_symint L['y'].size()[0] 2 None
V0515 09:03:07.756000 281473434236992 torch/fx/experimental/symbolic_shapes.py:2988] [0/0] track_symint L['y'].size()[1] 2 None
V0515 09:03:07.756000 281473434236992 torch/fx/experimental/symbolic_shapes.py:2988] [0/0] track_symint L['y'].stride()[0] 2 None
V0515 09:03:07.757000 281473434236992 torch/fx/experimental/symbolic_shapes.py:2988] [0/0] track_symint L['y'].stride()[1] 1 None
V0515 09:03:07.757000 281473434236992 torch/fx/experimental/symbolic_shapes.py:2988] [0/0] track_symint L['y'].storage_offset() 0 None
V0515 09:03:07.759000 281473434236992 torch/fx/experimental/symbolic_shapes.py:3138] [0/0] Skipping guard L['x'].size()[0] == 2
V0515 09:03:07.759000 281473434236992 torch/fx/experimental/symbolic_shapes.py:3138] [0/0] Skipping guard L['x'].size()[1] == 2
V0515 09:03:07.760000 281473434236992 torch/fx/experimental/symbolic_shapes.py:3138] [0/0] Skipping guard L['x'].stride()[0] == 2
V0515 09:03:07.760000 281473434236992 torch/fx/experimental/symbolic_shapes.py:3138] [0/0] Skipping guard L['x'].stride()[1] == 1
V0515 09:03:07.761000 281473434236992 torch/fx/experimental/symbolic_shapes.py:3138] [0/0] Skipping guard L['x'].storage_offset() == 0
V0515 09:03:07.762000 281473434236992 torch/fx/experimental/symbolic_shapes.py:3138] [0/0] Skipping guard L['y'].size()[0] == 2
V0515 09:03:07.762000 281473434236992 torch/fx/experimental/symbolic_shapes.py:3138] [0/0] Skipping guard L['y'].size()[1] == 2
V0515 09:03:07.763000 281473434236992 torch/fx/experimental/symbolic_shapes.py:3138] [0/0] Skipping guard L['y'].stride()[0] == 2
V0515 09:03:07.763000 281473434236992 torch/fx/experimental/symbolic_shapes.py:3138] [0/0] Skipping guard L['y'].stride()[1] == 1
V0515 09:03:07.764000 281473434236992 torch/fx/experimental/symbolic_shapes.py:3138] [0/0] Skipping guard L['y'].storage_offset() == 0
V0515 09:03:07.764000 281473434236992 torch/_dynamo/guards.py:1076] [0/0] [__guards] GUARDS:
V0515 09:03:07.765000 281473434236992 torch/_dynamo/guards.py:1085] [0/0] [__guards] hasattr(L['x'], '_dynamo_dynamic_indices') == False # return torch.add(x, y) # ome/torchair/test.py:20 in forward
V0515 09:03:07.768000 281473434236992 torch/_dynamo/guards.py:1085] [0/0] [__guards] hasattr(L['y'], '_dynamo_dynamic_indices') == False # return torch.add(x, y) # ome/torchair/test.py:20 in forward
V0515 09:03:07.770000 281473434236992 torch/_dynamo/guards.py:1085] [0/0] [__guards] utils_device.CURRENT_DEVICE == None # _dynamo/output_graph.py:430 in init_ambient_guards
V0515 09:03:07.772000 281473434236992 torch/_dynamo/guards.py:1085] [0/0] [__guards] ___check_current_backend(281468843512288) # _dynamo/output_graph.py:436 in init_ambient_guards
V0515 09:03:07.773000 281473434236992 torch/_dynamo/guards.py:1085] [0/0] [__guards] check_tensor(L['x'], Tensor, DispatchKeySet(PrivateUse1, BackendSelect, ADInplaceOrView, AutogradPrivateUse1), torch.float32, device=0, requires_grad=False, size=[2, 2], stride=[2, 1]) # return torch.add(x, y) # ome/torchair/test.py:20 in forward
V0515 09:03:07.775000 281473434236992 torch/_dynamo/guards.py:1085] [0/0] [__guards] check_tensor(L['y'], Tensor, DispatchKeySet(PrivateUse1, BackendSelect, ADInplaceOrView, AutogradPrivateUse1), torch.float32, device=0, requires_grad=False, size=[2, 2], stride=[2, 1]) # return torch.add(x, y) # ome/torchair/test.py:20 in forward
[INFO] TORCHAIR(9569,python):2025-05-15 09:03:08.055.789 [fx2acl_converter.py:148]9569 Success to capture fx graph[id: 281468755723648] and start to run AclGraph[id: 281468838205920].
模型的最终输出:
tensor([[-1.4626, 1.1921],
[ 1.8496, -0.7179]], device='npu:0')
5 小结
经过总体9篇的介绍,相信大家已经对AclConcreteGraph中的成图有个大概的了解。剩下就剩一个遗留问题,就是GeConcreteGraph,顺便看看GeConcreteGraph与AclConcreteGraph之间的差别。