文章目录
- 前言
- 文件描述符简介
- 文件描述符原理
- 文件描述符实现
- 修改thread.h
- 修改thread.c
- 文件操作相关的基础函数
- inode操作相关函数
- 文件相关函数
- 编写file.h
- 编写file.c
- 目录相关函数
- 完善fs/dir.h
- 编写fs/dir.c
- 路径解析相关函数
- 实现文件检索功能
- 修改fs.h
- 继续完善fs.c
- makefile
- 结语
前言
本章是14章第二篇博客,计划完成14.3、14.4两个小节内容。14.3是文件描述符简介,比较短,我们摘一些要点即可,14.4是一个大章,我们要完成文件操作的很多基础函数,代码量很大。
文件描述符简介
文件描述符原理
首先引入文件结构这个概念。文件结构用于描述文件被打开后,文件读写偏移量等信息。每次打开一个文件,就会创建一个文件结构,多次打开会创建多个文件结构。

Linux 把所有的“文件结构”组织到一起形成数组统一管理, 该数组称为文件表,我们要多次引用此概念。
然后引入文件描述符。在Linux中,我们读写函数文件时都是通过操作文件描述符来完成的。例如open,返回一个数字,而该数字就是我们所说的文件描述符,文件描述符是个整数,准确地说,它是PCB中文件描述符数组元素的下标,只不过此数字并不用来表示“数量”,而是用 来表示“位置”,它是位于进程PCB中的文件描述符数组的元素的下标,而文件描述符数组元素中的信息又指向文件表中的某个文件结构。
为什么文件描述符是数字,而不是像其他描述符那样,是个具有多个成员属性的复合数据结构?(1)所有进程可打开的文件数是一致的,每个进程都要有一套独立完整的文件描述符数组。(2)文件结构中包含进程执行文件操作的偏移量,它属于与各个任务单独绑定的资源,因此最好放在 PCB 中管理。
综合以上两点,我们不会把完整庞大的文件表塞进pcb,只要在 PCB中建立个文件描述符数组就可以了,该数组成员不需要是真正的文件结构,出于简单处理,咱们用int整型就足够了,用它存储文件表中文件结构的下标。
如何通过一个数字,也就是文件描述符,来找到文件数据块的?见示意图
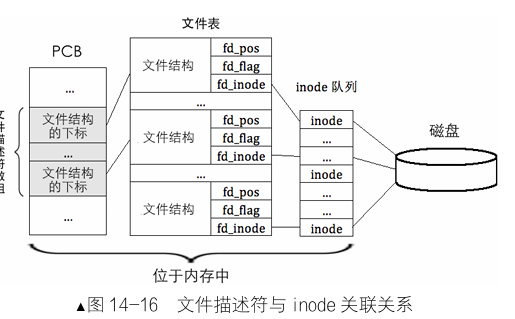
梳理寻址过程:某个进程调用类似于open这样的函数,把文件描述符(int类型)作为参数提交给文件系统,文件系统通过进程pcb中的文件描述符数组,索引到一个文件表的文件结构表项,从这个文件结构获取inode指针,通过inode指针找到数据块。
文件描述符数组在pcb中创建,inode队列在创建文件系统时就已经实现,所以创建文件描述符的过程就是在pcb数组、文件表和inode队列中寻找空位填充的过程。
文件描述符实现
这部分其实是在pcb中完善文件描述符数组属性。完整的通过文件描述符操作文件我们会在14.4中实现
修改thread.h
只给出修改部分吧,开头新增了一个宏,pcb结构体新增了一个文件描述符属性。
...
#define MAX_FILES_OPEN_PER_PROC 8 // 每个进程最大能同时打开的文件数
...
/* 线程或进程的pcb程序控制块 */
struct task_struct
{
uint32_t *self_kstack; // 线程自己的栈的栈顶指针
pid_t pid; // 线程的pid,系统调用部分对它进行操作
enum thread_status status; // 线程的状态
uint8_t priority; // 线程的优先级
uint8_t ticks; // 线程的时间片,在处理器上运行的时间滴答数
uint32_t elapsed_ticks; // 线程的运行时间,也就是这个线程已经执行了多久
char name[16]; // 线程的名字
int32_t fd_table[MAX_FILES_OPEN_PER_PROC]; // 文件描述符数组
struct list_elem general_tag; // 用于线程在一般队列中的节点
struct list_elem all_list_tag; // 用于线程在thread_all_list队列中的节点
uint32_t *pgdir; // 如果是进程,这是进程的页表结构中页目录表的虚拟地址,线程则置为NULL
struct virtual_addr userprog_vaddr; // 用户进程的虚拟地址,后续转化为物理地址后存入cr3寄存器
struct mem_block_desc u_block_desc[DESC_CNT]; // 进程内存块描述符数组,用于用户进程的堆内存管理
uint32_t stack_magic; // 线程栈的魔数,边界标记,用来检测栈溢出
};
...
修改thread.c
初始化刚刚新增的文件描述符数组
...
/* 初始化线程基本信息 */
void init_thread(struct task_struct *pthread, char *name, int prio)
{
memset(pthread, 0, sizeof(*pthread)); // 清空线程pcb
pthread->pid = allocate_pid(); // 获取唯一的pid
strcpy(pthread->name, name); // 线程名字
if (pthread == main_thread) // 线程状态
pthread->status = TASK_RUNNING;
else
pthread->status = TASK_READY;
/* self_kstack 是线程自己在内核态下使用的栈顶地址 */
pthread->self_kstack = (uint32_t *)((uint32_t)pthread + PG_SIZE); // 线程内核栈
/*初始化文件描述符数组*/
// 预留标准输入输出
pthread->fd_table[0] = 0;
pthread->fd_table[1] = 1;
pthread->fd_table[2] = 2;
// 剩下的设置为-1
uint8_t fd_idx = 3;
while (fd_idx < MAX_FILES_OPEN_PER_PROC)
{
pthread->fd_table[fd_idx] = -1;
fd_idx++;
}
pthread->priority = prio; // 线程优先级
pthread->ticks = prio; // 线程时间片
pthread->elapsed_ticks = 0; // 线程运行时间
pthread->pgdir = NULL; // 线程页表
pthread->stack_magic = 0x20250325; // 线程栈的魔数,边界标记,用来检测栈溢出
}
...
有关线程的部分就修改这些,剩下的就涉及到其他文件模块了,我们下一小节实现。
文件操作相关的基础函数
摘一下书上的原文:在本节我们要想实现文件及目录的创建、打开、读、写操作,必须建设好基础设施,现在咱们要一步 一个脚印,慢慢走向目的地。 为了帮助大伙儿理清楚函数间的依赖关系,本文按照它们的调用关系来介绍相关的文件,同时为了减 少学习的复杂性,根据实际情况有可能只会列出文件中的部分代码,并不是一股脑地把不相关的内容也搬 出来,待需要的时候依然会在相同的文件中添加新功能,因此有可能同一件文件会在不同功能的讲解中反 复更新,请您知晓。
inode操作相关函数
回顾:inode在inode数组里,inode数组实际位置在根目录前,inode位图后,inode数组的起始地址和大小也被记录在超级块里。这部分可以参考14.1文件系统布局。
在我们的文件系统里,引导扇区占据第0扇区、超级块占用第1扇区,位图类结构必须对齐到扇区,数据类结构(包括数组,根目录,空闲块)大小不定,可以跨扇区存在。
来看代码,在fs路径下创建inode.c文件,总共是写160行左右的代码,实现5个函数
#include "inode.h"
#include "../device/ide.h"
#include "../kernel/debug.h"
#include "../kernel/interrupt.h"
#include "../thread/thread.h"
#include "../lib/string.h"
#include "../lib/kernel/stdint.h"
/*用来存储inode位置的结构体*/
struct inode_position
{
bool two_sec; // 此inode是否跨区
uint32_t sec_lba; // 此inode起始扇区号
uint32_t off_size; // 此inode在扇区内的字节偏移量
};
/*获取inode所在的扇区和扇区内的偏移量*/
static void inode_locate(struct partition *part, uint32_t inode_no, struct inode_position *inode_pos)
{
ASSERT(inode_no < 4096);
uint32_t inode_table_lba = part->sb->inode_table_lba;
uint32_t inode_size = sizeof(struct inode);
uint32_t off_size = inode_no * inode_size; // 第no号inode据inode数组起始位置的字节偏移量
uint32_t off_sec = off_size / 512; // 字节偏移量对应的扇区偏移量
uint32_t off_size_in_sec = off_size % 512; // 待查找的inode在此扇区的起始地址
// 判断此inode是否跨区
uint32_t left_in_sec = 512 - off_size_in_sec; // 本扇区剩余存储空间
// 剩余空间不够一个inode
if (left_in_sec < inode_size)
{
inode_pos->two_sec = true;
}
else
{
inode_pos->two_sec = false;
}
inode_pos->sec_lba = inode_table_lba + off_sec;
inode_pos->off_size = off_size_in_sec;
}
/*将内存中的inode写入到硬盘分区part*/
void inode_sync(struct partition *part, struct inode *inode, void *io_buf)
{
uint8_t inode_no = inode->i_no;
struct inode_position inode_pos;
// 调用上面的函数获取inode所在的扇区和偏移量,保存到inode_pos
inode_locate(part, inode_no, &inode_pos);
ASSERT(inode_pos.sec_lba <= (part->start_lba + part->sec_cnt));
struct inode pure_inode;
memcpy(&pure_inode, inode, sizeof(struct inode));
// 以下三个成员只在内存中有意义,写入硬盘时清理掉即可
pure_inode.i_open_cnts = 0;
pure_inode.write_deny = false; // 可读可写
pure_inode.inode_tag.prev = pure_inode.inode_tag.next = NULL;
// 以下,先把原有inode读取出来,更新后再写入
char *inode_buf = (char *)io_buf;
if (inode_pos.two_sec)
{
// 如果跨扇区了,需要读两个扇区
ide_read(part->my_disk, inode_pos.sec_lba, inode_buf, 2);
/*inode_buf + inode_pos.off_sizes是在缓冲区内的偏移地址
*用于在512/1024字节的缓冲区内定位到实际indoe位置*/
memcpy((inode_buf + inode_pos.off_size), &pure_inode, sizeof(struct inode));
ide_write(part->my_disk, inode_pos.sec_lba, inode_buf, 2);
}
else
{
ide_read(part->my_disk, inode_pos.sec_lba, inode_buf, 1);
memcpy((inode_buf + inode_pos.off_size), &pure_inode, sizeof(struct inode));
ide_write(part->my_disk, inode_pos.sec_lba, inode_buf, 1);
}
}
/*根据i节点号返回i节点指针*/
struct inode *inode_open(struct partition *part, uint32_t inode_no)
{
// 先在每个分区中存在的,打开的i节点链表中寻找i节点,此链表是为了提速创建的缓冲区
struct list_elem *elem = part->open_inodes.head.next;
struct inode *inode_found;
while (elem != &part->open_inodes.tail)
{
inode_found = elem2entry(struct inode, inode_tag, elem);
if (inode_found->i_no == inode_no) // 如果成功找到,inode打开次数+1,返回indoe地址
{
inode_found->i_open_cnts++;
return inode_found;
}
elem = elem->next;
}
/*目前在链表中没有找到,于是从硬盘中读入inode并加入链表*/
struct inode_position inode_pos;
// 调用locate函数,获知no对应的inode的信息
inode_locate(part, inode_no, &inode_pos);
/*为了让进程新创建的inode被共享,需要将inode放在内核区
*需要临时将pcb的pgdir设置为NULL*/
struct task_struct *cur = running_thread();
uint32_t *cur_pagedir_bak = cur->pgdir; // 临时记录
cur->pgdir = NULL;
inode_found = (struct inode *)sys_malloc(sizeof(struct inode));
cur->pgdir = cur_pagedir_bak;
char *inode_buf;
if (inode_pos.two_sec == true)
{
// 跨扇区读两个扇区
inode_buf = (char *)sys_malloc(1024);
ide_read(part->my_disk, inode_pos.sec_lba, inode_buf, 2);
}
else
{
inode_buf = (char *)sys_malloc(512);
ide_read(part->my_disk, inode_pos.sec_lba, inode_buf, 1);
}
memcpy(inode_found, inode_buf + inode_pos.off_size, sizeof(struct inode));
// 加入队列方便后续使用
list_push(&part->open_inodes, &inode_found->inode_tag);
// 队列里没有,说明这是第一次被打开,打开次数设置为1
inode_found->i_open_cnts = 1;
sys_free(inode_buf);
return inode_found;
}
/*关闭indoe或减少inode打开数*/
void inode_close(struct inode *inode)
{
enum intr_status old_status = intr_disable(); // 关inode应为原子操作
if (--inode->i_open_cnts == 0)
{
list_remove(&inode->inode_tag);
// 内存中新的inode开辟在内核空间,移除时也需要确保回收内核空间
struct task_struct *cur = running_thread();
uint32_t *cur_pagedir_bak = cur->pgdir; // 临时记录
cur->pgdir = NULL;
sys_free(inode);
cur->pgdir = cur_pagedir_bak;
}
intr_set_status(old_status);
}
/*初始化new_inode*/
void inode_init(uint32_t inode_no, struct inode *new_inode)
{
new_inode->i_no = inode_no;
new_inode->i_size = 0;
new_inode->i_open_cnts = 0;
new_inode->write_deny = false;
// 初始化块索引数组i_sector
uint8_t sec_idx = 0;
while (sec_idx < 13)
{
new_inode->i_sectors[sec_idx] = 0;
sec_idx++;
}
}
这个文件已经编译过一次,排除了编译错误。
现在是2025年5月11日21点11分,今天就写到这里吧。
文件相关函数
这部分涉及两个新文件,file.c和file.h,都在fs目录下。
编写file.h
#ifndef __FS_FILE_H
#define __FS_FILE_H
#include "../lib/kernel/stdint.h"
struct inode; // 前向声明,代替inode
struct partition; // 代替ide.h
/*文件结构,每次打开文件就会创建一个此结构
*记录偏移量,打开情况,inode指针等信息*/
struct file
{
uint32_t fd_pos; // 记录文件操作的偏移地址,最小是0,最大是size-1
uint32_t fd_flag; // 记录是否打开
struct inode *fd_inode; // 记录此文件的inode指针
};
/*标准输入输出描述符*/
enum std_fd
{
stdin_no, // 0,标准输入
stdout_no, // 1,标准输出
stderr_no // 2,标准错误
};
/*位图类型*/
enum bitmap_type
{
INODE_BITMAP, // inode位图
BLOCK_BITMAP // 块位图
};
#define MAX_FILE_OPEN 32 // 系统可打开的最大文件数
/*从文件表file_table中获取一个空闲位,成功返回下标,失败返回-1*/
int32_t get_free_slot_in_global(void);
/*将全局描述符下标安装到进程或线程自己的文件描述符数组fd_table中
*成功返回下标,失败返回-1*/
int32_t pcb_fd_install(int32_t global_fd_idx);
/*分配一个i节点,返回i结点号*/
int32_t inode_bitmap_alloc(struct partition *part);
/*分配1个扇区,返回扇区地址*/
int32_t block_bitmap_alloc(struct partition *part);
/*将内存中bitmap第bit_idx位所在的512个字节同步到硬盘*/
void bitmap_sync(struct partition *part, uint32_t bit_idx, uint8_t btmp);
#endif
编写file.c
#include "file.h"
#include "inode.h" //对应前向声明
#include "../device/ide.h" //对应前向声明
#include "../lib/stdio.h" //printk
#include "../thread/thread.h" //pcb
/*文件表,前三个成员预留给标准输入、标准输出、标准错误*/
struct file file_table[MAX_FILE_OPEN];
/*从文件表file_table中获取一个空闲位,成功返回下标,失败返回-1*/
int32_t get_free_slot_in_global(void)
{
uint32_t fd_idx = 3; // 跳过0、1、2
while (fd_idx < MAX_FILE_OPEN)
{
if (file_table[fd_idx].fd_inode == NULL)
{
break; // i结点==NULL说明这个文件结构没被使用,存在空闲
}
fd_idx++;
}
if (fd_idx == MAX_FILE_OPEN)
{
// 超出最大打开文件数限制
printk("exceed max open files\n");
return -1;
}
return fd_idx;
}
/*将全局描述符下标安装到进程或线程自己的文件描述符数组fd_table中
*成功返回下标,失败返回-1*/
int32_t pcb_fd_install(int32_t global_fd_idx)
{
struct task_struct *cur = running_thread();
uint8_t local_fd_idx = 3;
while (local_fd_idx < MAX_FILES_OPEN_PER_PROC)
{
// 我们在线程初始化的时候,用-1表示线程文件表空位,所以-1对应可以使用
if (cur->fd_table[local_fd_idx] == -1)
{
cur->fd_table[local_fd_idx] = global_fd_idx;
break;
}
local_fd_idx++;
}
if (local_fd_idx == MAX_FILES_OPEN_PER_PROC)
{
// 超出单个进程最大打开文件数限制
printk("exceed max open files_per_proc\n");
return -1;
}
return local_fd_idx;
}
/*分配一个i节点,返回i结点号*/
int32_t inode_bitmap_alloc(struct partition *part)
{
int32_t bit_idx = bitmap_scan(&part->inode_bitmap, 1);
if (bit_idx == -1)
{
return -1; // 申请失败
}
// 申请成功,设置位图并返回编号
bitmap_set(&part->inode_bitmap, bit_idx, 1);
return bit_idx;
}
/*分配1个扇区,返回扇区lba地址*/
int32_t block_bitmap_alloc(struct partition *part)
{
int32_t bit_idx = bitmap_scan(&part->block_bitmap, 1);
if (bit_idx == -1)
{
return -1; // 申请失败
}
bitmap_set(&part->block_bitmap, bit_idx, 1);
// 返回扇区lba号
return (part->sb->block_bitmap_lba + bit_idx);
}
/*内存中某个bitmap第bit_idx位修改后,将对应的修改同步到硬盘*/
void bitmap_sync(struct partition *part, uint32_t bit_idx, uint8_t btmp)
{
// 一个位图的一个位进行了修改,说明512字节的一个扇区被分配或者回收,需要更新硬盘位图
// 位图结构总是整扇区大小的,一次至少更新512字节
uint32_t off_sec = bit_idx / 4096; // 找到位图对应的硬盘上的扇区偏移量
uint32_t off_size = off_sec * 512; // 对应的字节偏移量
uint32_t sec_lba;
uint8_t *bitmap_off;
if (btmp == INODE_BITMAP)
{
sec_lba = part->sb->inode_bitmap_lba + off_sec;
bitmap_off = part->inode_bitmap.btmp_bits + off_size;
}
else if (btmp == BLOCK_BITMAP)
{
sec_lba = part->sb->block_bitmap_lba + off_sec;
bitmap_off = part->block_bitmap.btmp_bits + off_size;
}
ide_write(part->my_disk, sec_lba, bitmap_off, 1);
}
目前file.c是100行左右代码,后续还会新增。
目录相关函数
先回顾目录和目录项:目录本身是一种特殊文件,内部的数据块保存的是目录项的列表。目录项是目录文件的一条记录,用于记录该目录下的一个文件或目录信息。这两种结构被抽象在dir.h中,大小都不需要是整扇区。
完善fs/dir.h
新增了函数声明
#ifndef __FS_DIR_H
#define __FS_DIR_H
#include "../lib/kernel/stdint.h"
#include "fs.h" //提供enum file_types
struct inode; // inode前向声明
#define MAX_FILE_NAME_LEN 16 // 最大文件名长度
/*目录结构体*/
struct dir
{
struct inode *inode;
uint32_t dir_pos; // 记录在此目录下的偏移
uint8_t dir_buf[512]; // 目录的数据缓冲区
};
/*目录项结构体*/
struct dir_entry
{
char filename[MAX_FILE_NAME_LEN]; // 普通文件或目录名称
uint32_t i_no; // 对应的i结点编号
enum file_types f_type; // 文件类型
};
/*打开根目录*/
void open_root_dir(struct partition *part);
/*在part分区打开i结点编号inode_no的目录,并返回目录指针*/
struct dir *dir_open(struct partition *part, uint32_t inode_no);
/*在part分区内的pdir目录内寻找名为name的文件或目录
*找到后返回true,并把目录项存在dir_e,否则返回false*/
bool search_dir_entry(struct partition *part, struct dir *pdir, const char *name, struct dir_entry *dir_e);
/*关闭目录*/
void dir_close(struct dir *dir);
/*在内存中初始化目录项p_de*/
void create_dir_entry(char *filename, uint32_t inode_no, uint8_t file_type, struct dir_entry *p_de);
/*将目录项p_de写入父目录parent_dir中,io_buf由主调函数提供*/
bool sync_dir_entry(struct dir *parent_dir, struct dir_entry *p_de, void *io_buf);
#endif
编写fs/dir.c
回顾一下inode结构。一块一扇区512字节。对于我们的inode,只有13个指针,前12个是直接块指针,最后一个指针指向一级间接块索引表。索引表页也是一个块,512字节大小,内部包含128个4字节指针,再次指向128个块。一个inode结构可以控制140个块。
这是本节新增文件,写完是230+行。
#include "dir.h"
#include "inode.h" // 前向声明
#include "file.h" //block_bitmap_alloc函数
#include "../device/ide.h" // partition结构体
#include "../kernel/memory.h" // sys_malloc函数
#include "../kernel/debug.h" //ASSERT哨兵
#include "../lib/stdio.h" //printk函数
#include "../lib/string.h" //strcmp函数
struct dir root_dir; // 根目录
/*打开根目录,即初始化*/
void open_root_dir(struct partition *part)
{
root_dir.inode = inode_open(part, part->sb->root_inode_no);
root_dir.dir_pos = 0; // 偏移地址为0
}
/*在part分区打开i结点编号inode_no的目录,并返回目录指针*/
struct dir *dir_open(struct partition *part, uint32_t inode_no)
{
struct dir *pdir = (struct dir *)sys_malloc(sizeof(struct dir));
pdir->inode = inode_open(part, inode_no);
pdir->dir_pos = 0;
return pdir;
}
/*在part分区内的pdir目录内寻找名为name的文件或目录
*找到后返回true,并把目录项存在dir_e,否则返回false*/
bool search_dir_entry(struct partition *part, struct dir *pdir, const char *name, struct dir_entry *dir_e)
{
/*对于我们的inode,只有13个指针,前12个是直接块指针,最后一个指针指向一级间接块索引表
*索引表页也是一个块,512字节大小,内部包含128个4字节指针,再次指向128个块
*当硬盘被虚拟抽象到内存后,LBA号也就抽象成了指针*/
uint32_t block_cnt = 12 + 128; // 12个直接块+128个一级间接块指针
// all_block保存此inode所有块指针,32位系统中,一个指针大小为4字节
uint32_t *all_block = (uint32_t *)sys_malloc((12 + 128) * 4);
if (all_block == NULL)
{
printk("search_dir_entry: sys_malloc for all_block failed");
return false;
}
uint32_t block_idx = 0;
// 先处理12个直接块
while (block_idx < 12)
{
all_block[block_idx] = pdir->inode->i_sectors[block_idx];
block_idx++;
}
block_idx = 0;
// 如果使用了一级间接块表,处理一级间接块
if (pdir->inode->i_sectors[12] != 0)
{
// 因为all_block的类型是uint32_t *,所以后面的+12其实是+12*4,目的是跳过12个直接块
ide_read(part->my_disk, pdir->inode->i_sectors[12], all_block + 12, 1);
}
uint8_t *buf = (uint8_t *)sys_malloc(SECTOR_SIZE);
struct dir_entry *p_de = (struct dir_entry *)buf; // 指向目录项的指针
uint32_t dir_entry_size = part->sb->dir_entry_size;
uint32_t dir_entry_cnt = SECTOR_SIZE / dir_entry_size; // 计算一个扇区包含多少目录项
while (block_idx < block_cnt) // 遍历这个目录拥有的所有的块
{
// 地址为0说明块内无数据,寻找下一个块
if (all_block[block_idx] == 0)
{
block_idx++;
continue;
}
ide_read(part->my_disk, all_block[block_idx], buf, 1);
// 现在我们读取了一个块的数据到buf中(也就是pd_e中),接下来遍历这个扇区内所有的目录项
uint32_t dir_entry_idx = 0;
while (dir_entry_idx < dir_entry_cnt)
{
// 取反的原因涉及到strcmp函数的返回值
if (!strcmp(p_de->filename, name))
{
// 找到了相关文件或目录,复制到指定内存dir_e
memcpy(dir_e, p_de, dir_entry_size);
sys_free(buf);
sys_free(all_block);
return true;
}
dir_entry_idx++; // 进入下一个目录项
p_de++;
}
block_idx++; // 此扇区已遍历完,进入下一个扇区
p_de = (struct dir_entry *)buf; // 指向新扇区的buf
memset(buf, 0, SECTOR_SIZE); // 将buf清零
}
sys_free(buf);
sys_free(all_block);
return false;
}
/*关闭目录*/
void dir_close(struct dir *dir)
{
/******************** 根目录不能被关闭 ********************
*1 根目录自打开后就不应该关闭,否则还需要再次open_root_dir();
*2 root_dir 所在的内存是低端1MB之内,并非在堆中,free会出问题 */
if (dir == &root_dir)
{
return;
}
// 对于一般目录,关闭目录就是关闭目录文件inode,然后释放dir所占内存
inode_close(dir->inode);
sys_free(dir);
}
/*在内存中初始化目录项p_de*/
void create_dir_entry(char *filename, uint32_t inode_no, uint8_t file_type, struct dir_entry *p_de)
{
ASSERT(strlen(filename) <= MAX_FILE_NAME_LEN);
memcpy(p_de->filename, filename, strlen(filename));
p_de->i_no = inode_no;
p_de->f_type = file_type;
}
/*将目录项p_de写入父目录parent_dir中,io_buf由主调函数提供*/
bool sync_dir_entry(struct dir *parent_dir, struct dir_entry *p_de, void *io_buf)
{
struct inode *dir_inode = parent_dir->inode;
uint32_t dir_size = dir_inode->i_size;
uint32_t dir_entry_size = cur_part->sb->dir_entry_size;
ASSERT(dir_size % dir_entry_size == 0); // 目录大小是目录项大小的整数倍
uint32_t dir_entry_per_sec = (512 / dir_size); // 每扇区目录项数
int32_t block_lba = -1; // 数据块lba
uint8_t block_idx = 0;
uint32_t all_block[140] = {0};
// 处理直接块
while (block_idx < 12)
{
all_block[block_idx] = dir_inode->i_sectors[block_idx];
block_idx++;
}
struct dir_entry *dir_e = (struct dir_entry *)io_buf; // dir_e用来在io_buf中遍历目录项
int32_t block_bitmap_idx = -1; // 数据块位图索引
/*开始遍历扇区寻找空目录项,如果已有扇区没有空目录项,在文件大小范围内,申请新扇区*/
while (block_idx < 140)
{
block_bitmap_idx = -1;
if (all_block[block_idx] == 0) // 此块未使用
{
// 申请此块,获得lba
block_lba = block_bitmap_alloc(cur_part);
if (block_lba == -1) // 失败
{
printk("alloc block bitmap for sync_dir_entry failed\n");
return false;
}
// 数据块位图索引=当前lba-数据块起始lba
block_bitmap_idx = block_lba - cur_part->sb->data_start_lba;
ASSERT(block_bitmap_idx != -1);
bitmap_sync(cur_part, block_bitmap_idx, BLOCK_BITMAP);
block_bitmap_idx = -1;
// 先定位到空目录项所在扇区
if (block_idx < 12) // 直接块
{
dir_inode->i_sectors[block_idx] = all_block[block_idx] = block_lba;
}
else if (block_idx == 12) // 还未分配一级间接块表地址
{
dir_inode->i_sectors[12] = block_lba; // 将上面获取的lba作为一级间接块表地址
block_lba = -1;
block_lba = block_bitmap_alloc(cur_part); // 分配第0个间接块地址
if (block_lba == -1) // 分配失败
{
block_bitmap_idx = dir_inode->i_sectors[12] - cur_part->sb->data_start_lba;
bitmap_set(&cur_part->block_bitmap, block_bitmap_idx, 0); // 将相应块位图设置为未使用
dir_inode->i_sectors[12] = 0;
printk("alloc block bitmap for sync_dir_entry failed\n");
return false;
}
// 同步block_bitmap
block_bitmap_idx = block_lba - cur_part->sb->data_start_lba;
ASSERT(block_bitmap_idx != -1);
bitmap_sync(cur_part, block_bitmap_idx, BLOCK_BITMAP);
all_block[12] = block_lba;
// 写入硬盘
ide_write(cur_part->my_disk, dir_inode->i_sectors[12], all_block + 12, 1);
}
else // 还有未分配的间接块
{
all_block[block_idx] = block_lba;
// 我们更新硬盘中的一级间接表,让间接表多一个指向新扇区的指针
ide_write(cur_part->my_disk, dir_inode->i_sectors[12], all_block + 12, 1);
}
// 将新目录项p_de写入新分配的间接块
memset(io_buf, 0, 512);
memcpy(io_buf, p_de, dir_entry_size);
// 区别dir_inode->i_sectors[12]和all_block
// 前者是inode内一级块表,通过它索引到all_block后128项
ide_write(cur_part->my_disk, all_block[block_idx], io_buf, 1);
dir_inode->i_size += dir_entry_size;
return true;
}
/*对应此块未使用的情况,如果此块已被使用,将块读入内存
*然后寻找块内有没有空目录项*/
ide_read(cur_part->my_disk, all_block[block_idx], io_buf, 1);
uint8_t dir_entry_idx = 0; // 用于按目录项遍历块
while (dir_entry_idx < dir_entry_per_sec)
{
if ((dir_e + dir_entry_idx)->f_type == FT_UNKNOWN)
{
// FT_UNKNOWN代表未使用或已删除,总之就是空白
memcpy(dir_e + dir_entry_idx, p_de, dir_entry_size);
ide_write(cur_part->my_disk, all_block[block_idx], io_buf, 1);
dir_inode->i_size += dir_entry_size;
return true;
}
dir_entry_idx++;
}
block_idx++;
}
printk("directory is full!\n");
return false;
}
从今天下午4点开始写,到现在是2025年5月12日20点45分,进度推进到这里。
路径解析相关函数
路径解析,就是根据路径把文件名分层,逐层在磁盘查找,确认文件名是否存在。这部分继续编写fs.c,总共是实现两个函数。
/*将最上层路径名解析出来,在name_store保存当前路径名,然后返回解析后的子路径*/
static char *path_paser(char *pathname, char *name_store)
{
if (pathname[0] == '/') // 跳过前面所有的/
{
while (*pathname == '/')
{
pathname++;
}
}
// 开始一般的路径解析,提取最上层路径名,即从字符开始到第一个/停止
while (*pathname != '/' && *pathname != 0) // 0是空字符ascii码
{
// 我不喜欢写自增,因为自增容易带来阅读障碍
*name_store = *pathname;
name_store++;
pathname++;
}
if (pathname[0] == 0)
{
return NULL;
}
return pathname;
}
/*返回路径深度*/
int32_t path_depth_cnt(char *pathname)
{
ASSERT(pathname != NULL);
char *p = pathname; // 用于保存每次path_paser返回的子路径
char name[MAX_FILE_NAME_LEN]; // 用于保存每次path_paser返回的原文件名
uint32_t depth = 0;
p = path_paser(p, name);
while (name[0] != 0) // 只要存在当前文件
{
depth++;
memset(name, 0, MAX_FILE_NAME_LEN);
if (p != 0) // 只要存在子路径
{
p = path_paser(p, name);
}
}
return depth;
}
实现文件检索功能
文件检索就是确定文件是否存在于此路径
修改fs.h
新增了宏,枚举,结构体,还有上一节的函数的声明。
#ifndef __FS_FS_H
#define __FS_FS_H
struct partition; // 前向声明,代替ide.h
struct dir; // 代替dir.h
#define MAX_FILES_PER_PART 4096 // 每个扇区最大支持文件数
#define BITS_PER_SECTOR 4096 // 每扇区的位数
#define SECTOR_SIZE 512 // 每扇区的字节数
#define BLOCK_SIZE SECTOR_SIZE // 块字节大小 我们设置为1个块==1个扇区
#define MAX_PATH_LEN 512 // 路径最大长度
/*文件类型枚举*/
enum file_types
{
FT_UNKNOWN, // 0,未知文件类型
FT_REGULAR, // 1,普通文件类型
FT_DIRECTORY // 2,目录文件类型
};
/*打开文件的选项枚举*/
enum oflags
{
O_RDONLY, // 只读
O_WRONLY, // 只写
O_RDWR, // 读写
O_CREAT = 4 // 创建
};
/*记录查找过程中的上级路径*/
struct path_search_record
{
char searched_path[MAX_PATH_LEN]; // 父路径
struct dir *parent_dir; // 直接父目录
enum file_types file_type; // 找到的文件的类型
};
void filesys_init(void); /*在磁盘上搜索文件系统,若没有则格式化分区创建文件系统*/
int32_t path_depth_cnt(char *pathname); /*返回路径深度*/
extern struct partition *cur_part;
#endif
继续完善fs.c
#include "fs.h"
#include "inode.h"
#include "dir.h"
#include "super_block.h"
#include "../lib/kernel/stdint.h"
#include "../lib/kernel/list.h"
#include "../lib/string.h"
#include "../lib/stdio.h"
#include "../device/ide.h" //partition
#include "../kernel/debug.h"
struct partition *cur_part; // 记录默认情况下操作的分区
/* 在分区链表中找到名为part_name的分区,并将其指针赋值给cur_part */
static bool mount_partition(struct list_elem *pelem, int arg)
{
char *part_name = (char *)arg;
struct partition *part = elem2entry(struct partition, part_tag, pelem);
if (!strcmp(part->name, part_name))
{
cur_part = part;
struct disk *hd = cur_part->my_disk;
// 创建用来保存超级块的缓冲区
struct super_block *sb_buf = (struct super_block *)sys_malloc(SECTOR_SIZE);
// 在内存创建cur_part的超级块
cur_part->sb = (struct super_block *)sys_malloc(sizeof(struct super_block));
if (cur_part->sb == NULL)
{
PANIC("alloc memory failed!");
}
/*读入超级块到缓冲区*/
memset(sb_buf, 0, SECTOR_SIZE);
ide_read(hd, cur_part->start_lba + 1, sb_buf, 1);
/*把缓冲区超级块数据复制到cur_part的sb中*/
memcpy(cur_part->sb, sb_buf, sizeof(struct super_block));
/*为什么要先读入缓冲区,再把缓冲区数据复制到相应的变量中?
*缓冲区大小就是1扇区512字节,和硬盘读取标准对齐,而实际超级块结构体小于512字节
*如果直接读入实际结构体,会导致硬盘读写很慢。*/
/*将分区的块位图写入内存*/
// 开辟内存空间给位图指针
cur_part->block_bitmap.btmp_bits = (uint8_t *)sys_malloc(sb_buf->block_bitmap_sects * SECTOR_SIZE);
if (cur_part->block_bitmap.btmp_bits == NULL)
{
PANIC("alloc memory failed!");
}
// 设置位图长度
cur_part->block_bitmap.btmp_bytes_len = sb_buf->block_bitmap_sects * SECTOR_SIZE;
// sb_buf->block_bitmap_sects等价于cur_part->sb->block_bitmap_sects
// 给位图指针赋值
ide_read(hd, sb_buf->block_bitmap_lba, cur_part->block_bitmap.btmp_bits, sb_buf->block_bitmap_sects);
/*将分区的inode位图写入内存*/
cur_part->inode_bitmap.btmp_bits = (uint8_t *)sys_malloc(sb_buf->inode_bitmap_sects * SECTOR_SIZE);
if (cur_part->inode_bitmap.btmp_bits == NULL)
{
PANIC("alloc memory failed!");
}
cur_part->inode_bitmap.btmp_bytes_len = sb_buf->block_bitmap_sects * SECTOR_SIZE;
ide_read(hd, sb_buf->inode_bitmap_lba, cur_part->inode_bitmap.btmp_bits, sb_buf->inode_bitmap_sects);
list_init(&cur_part->open_inodes);
printk("mount %s done!\n", part->name);
/*返回true是为了配合定义在list.c的list_traversal函数,和本函数功能无关
*返回true时list_traversal停止对链表的遍历*/
return true;
}
return false;
}
static void partition_format(struct disk *hd, struct partition *part)
{
uint32_t boot_sector_sects = 1; // 根目录扇区
uint32_t super_block_sects = 1; // 超级块扇区
// inode位图所占扇区
uint32_t inode_bitmap_sects = DIV_ROUND_UP(MAX_FILES_PER_PART, BITS_PER_SECTOR);
// inode表所占扇区
uint32_t inode_table_sects = DIV_ROUND_UP(((sizeof(struct inode) * MAX_FILES_PER_PART)), SECTOR_SIZE);
uint32_t used_sects = boot_sector_sects + super_block_sects + inode_bitmap_sects + inode_table_sects;
uint32_t free_sects = part->sec_cnt - used_sects;
// 块位图所占扇区
uint32_t block_bitmap_sects = DIV_ROUND_UP(free_sects, BITS_PER_SECTOR);
uint32_t block_bitmap_bit_len = free_sects - block_bitmap_sects;
block_bitmap_sects = DIV_ROUND_UP(block_bitmap_bit_len, BITS_PER_SECTOR);
// 将超级块初始化
struct super_block sb;
sb.magic = 0x20250325;
sb.sec_cnt = part->sec_cnt;
sb.inode_cnt = MAX_FILES_PER_PART;
sb.part_lba_base = part->start_lba;
sb.block_bitmap_lba = sb.part_lba_base + 2;
sb.block_bitmap_sects = block_bitmap_sects;
sb.inode_bitmap_lba = sb.block_bitmap_lba + sb.block_bitmap_sects;
sb.inode_bitmap_sects = inode_bitmap_sects;
sb.inode_table_lba = sb.inode_bitmap_lba + sb.inode_bitmap_sects;
sb.inode_table_sects = inode_table_sects;
sb.data_start_lba = sb.inode_table_lba + sb.inode_table_sects;
sb.root_inode_no = 0;
sb.dir_entry_size = sizeof(struct dir_entry);
printk("%s info:\n"
" magic: 0x%x\n"
" part_lba_base: 0x%x\n"
" all_sectors: 0x%x\n"
" inode_cnt: 0x%x\n"
" block_bitmap_lba: 0x%x\n"
" block_bitmap_sects: 0x%x\n"
" inode_bitmap_lba: 0x%x\n"
" inode_bitmap_sects: 0x%x\n"
" inode_table_lba: 0x%x\n"
" inode_table_sects: 0x%x\n"
" data_start_lba: 0x%x\n",
part->name,
sb.magic, sb.part_lba_base, sb.sec_cnt, sb.inode_cnt,
sb.block_bitmap_lba, sb.block_bitmap_sects, sb.inode_bitmap_lba,
sb.inode_bitmap_sects, sb.inode_table_lba, sb.inode_table_sects,
sb.data_start_lba);
// 1.将超级块写入本分区1扇区
ide_write(hd, part->start_lba + 1, &sb, 1);
printk(" super_blcok_lba: 0x%x\n", part->start_lba + 1);
// 开辟一块缓冲区,大小为三个属性中最大的
uint32_t buf_size = (sb.block_bitmap_sects >= sb.inode_bitmap_sects) ? sb.block_bitmap_sects : sb.inode_bitmap_sects;
buf_size = (buf_size >= sb.inode_table_sects) ? buf_size : sb.inode_table_sects;
buf_size *= SECTOR_SIZE;
uint8_t *buf = (uint8_t *)sys_malloc(buf_size);
// 2.将块位图初始化并写入sb.block_bitmap_lba
buf[0] |= 0x01; // 0号块留给根目录
uint32_t block_bitmap_last_byte = block_bitmap_bit_len / 8;
uint8_t block_bitmap_last_bit = block_bitmap_bit_len % 8;
// last_size是保存位图的最后一个扇区中,多余出的位
uint32_t last_size = (SECTOR_SIZE - block_bitmap_last_byte % SECTOR_SIZE);
// 先将超出实际块数的部分设置为已占用1
memset(&buf[block_bitmap_last_byte], 0xff, last_size);
// 在将有效位重新设置为未占用0
uint8_t bit_idx = 0;
while (bit_idx <= block_bitmap_last_bit)
{
// 通过取反+左移,实现逐位清零
buf[block_bitmap_last_byte] &= ~(1 << bit_idx++);
}
ide_write(hd, sb.block_bitmap_lba, buf, sb.block_bitmap_sects);
// 3.将inode位图初始化并写入sb.inode_bitmap_lba
// 清空缓冲区
memset(buf, 0, buf_size);
buf[0] |= 0x1;
/*inode_table中有4096个inode,正好一个扇区,
*inode_bitmap扇区没有多余无效位,不需要进一步处理*/
ide_write(hd, sb.inode_bitmap_lba, buf, sb.inode_bitmap_sects);
// 4 将inode数组初始化并写入sb.inode_table_lba
// 初始化了第一个indoe
memset(buf, 0, buf_size);
struct inode *i = (struct inode *)buf;
i->i_size = sb.dir_entry_size * 2; // 留出..和.目录
i->i_no = 0;
i->i_sectors[0] = sb.data_start_lba;
ide_write(hd, sb.inode_table_lba, buf, sb.inode_table_sects);
// 5.将根目录写入sb.data_start_lba
memset(buf, 0, buf_size);
struct dir_entry *p_de = (struct dir_entry *)buf;
// 初始化当前目录.
memcpy(p_de->filename, ".", 1);
p_de->i_no = 0;
p_de->f_type = FT_DIRECTORY;
p_de++;
// 初始化父目录..
memcpy(p_de->filename, "..", 2);
p_de->i_no = 0;
p_de->f_type = FT_DIRECTORY;
ide_write(hd, sb.data_start_lba, buf, 1);
printk(" root_dir_lba: 0x%x\n", sb.data_start_lba);
printk("%s format done\n", part->name);
sys_free(buf);
}
/*在磁盘上搜索文件系统,若没有则格式化分区创建文件系统*/
void filesys_init()
{
uint8_t channel_no = 0, dev_no, part_idx = 0;
// 开辟超级块缓冲区
struct super_block *sb_buf = (struct super_block *)sys_malloc(SECTOR_SIZE);
if (sb_buf == NULL)
{
PANIC("alloc memory failed!");
}
printk("searching filesystem......\n");
while (channel_no < channel_cnt) // channel_cnt声明在ide.h,实现在ide.c
{
dev_no = 0;
while (dev_no < 2) // 一个通道可以挂载2个设备
{
if (dev_no == 0)
{
dev_no++;
continue;
}
struct disk *hd = &channels[channel_no].devices[dev_no];
struct partition *part = hd->prim_parts; // 初始指向4个主分区
while (part_idx < 12) // 4主分区+8逻辑分区
{
if (part_idx == 4)
{
part = hd->logic_parts; // 开始处理逻辑分区
}
if (part->sec_cnt != 0)
{
memset(sb_buf, 0, SECTOR_SIZE);
// 读取超级块,根据魔数判断是否存在文件系统
ide_read(hd, part->start_lba + 1, sb_buf, 1);
// 魔数匹配,说明存在我的文件系统
if (sb_buf->magic == 0x20250325)
{
printk(" %s has file system\n", part->name);
}
// 不匹配,认为不存在文件系统,于是创建我的操作系统
else
{
// 提示正在进行初始化
printk("formatting %s's partition %s......\n", hd->name, part->name);
// 调用函数创建每个分区的文件系统
partition_format(hd, part);
}
}
part_idx++;
part++; // 进入下一分区
}
dev_no++; // 进入下一磁盘
}
channel_no++; // 进入下一通道
}
sys_free(sb_buf);
/*确定默认操作分区*/
char default_part[8] = "sdb1";
/*挂载分区*/
list_traversal(&partition_list, mount_partition, (int)default_part);
}
/*将最上层路径名解析出来,在name_store保存当前路径名,然后返回解析后的子路径*/
static char *path_paser(char *pathname, char *name_store)
{
if (pathname[0] == '/') // 跳过前面所有的/
{
while (*pathname == '/')
{
pathname++;
}
}
// 开始一般的路径解析,提取最上层路径名,即从字符开始到第一个/停止
while (*pathname != '/' && *pathname != 0) // 0是空字符ascii码
{
// 我不喜欢写自增,因为自增容易带来阅读障碍
*name_store = *pathname;
name_store++;
pathname++;
}
if (pathname[0] == 0)
{
return NULL;
}
return pathname;
}
/*返回路径深度*/
int32_t path_depth_cnt(char *pathname)
{
ASSERT(pathname != NULL);
char *p = pathname; // 用于保存每次path_paser返回的子路径
char name[MAX_FILE_NAME_LEN]; // 用于保存每次path_paser返回的原文件名
uint32_t depth = 0;
p = path_paser(p, name);
while (name[0] != 0) // 只要存在当前文件
{
depth++;
memset(name, 0, MAX_FILE_NAME_LEN);
if (p != 0) // 只要存在子路径
{
p = path_paser(p, name);
}
}
return depth;
}
/*搜索文件pathname,若找到返回inode号,否则返回-1*/
static int search_file(const char *pathname, struct path_search_record *search_record)
{
/*如果查找的是根目录,直接返回根目录信息*/
if (!strcmp(pathname, "/") || !strcmp(pathname, "/.") || !strcmp(pathname, "/.."))
{
search_record->file_type = FT_DIRECTORY;
search_record->parent_dir = &root_dir;
search_record->searched_path[0] = 0;
return 0;
}
uint32_t path_len = strlen(pathname);
ASSERT(path_len < MAX_PATH_LEN);
char *sub_path = (char *)pathname;
struct dir *parent_dir = &root_dir;
struct dir_entry dir_e; // 保存查到的目录项
/*逐级解析路径*/
char name[MAX_FILE_NAME_LEN] = {0};
search_record->parent_dir = parent_dir;
search_record->file_type = FT_UNKNOWN;
uint32_t parent_inode_no = 0; // 父目录的inode号
sub_path = path_paser(sub_path, name);
while (name[0])
{
ASSERT(strlen(search_record->searched_path) < MAX_PATH_LEN);
/*记录已经存在的路径*/
strcat(search_record->searched_path, "/");
strcat(search_record->searched_path, name);
// 如果成功找到了当前本级文件名的目录项
if (search_dir_entry(cur_part, parent_dir, name, &dir_e))
{
memset(name, 0, MAX_FILE_NAME_LEN);
if (sub_path) // 如果还有子目录项
{
sub_path = path_paser(sub_path, name);
}
if (dir_e.f_type == FT_DIRECTORY) // 目录文件,需要进一步查找
{
parent_inode_no = parent_dir->inode->i_no;
dir_close(parent_dir);
parent_dir = dir_open(cur_part, dir_e.i_no);
search_record->parent_dir = parent_dir;
continue;
}
else if (dir_e.f_type == FT_REGULAR) // 普通文件,查找到了终点
{
search_record->file_type = FT_REGULAR;
return dir_e.i_no;
}
}
else // 没有找到当前文件名的目录项
{
return -1;
}
}
/*至此,已经遍历完完整目录,并且最后一个文件是目录文件*/
dir_close(search_record->parent_dir);
// 更新查找记录
search_record->parent_dir = dir_open(cur_part, parent_inode_no);
search_record->file_type = FT_DIRECTORY;
return dir_e.i_no;
}
这是目前能通过编译的fs.c,365行代码。
makefile
最后放一下这章结束时的makefile吧,这部分没有开bochs检验,因为还都是基础函数,所以没有什么运行截图。目前的makefile也是为了确保代码能编译,不保证代码逻辑的完全正确。
BUILD_DIR = ./build
ENTRY_POINT = 0xc0001500
AS = nasm
CC = gcc
LD = ld
LIB = -I lib/ -I lib/kernel/ -I lib/user/ -I kernel/ -I device/
ASFLAGS = -f elf
CFLAGS = -Wall -m32 -fno-stack-protector $(LIB) -c -fno-builtin -W -Wstrict-prototypes -Wmissing-prototypes
LDFLAGS = -m elf_i386 -Ttext $(ENTRY_POINT) -e main -Map $(BUILD_DIR)/kernel.map
OBJS = $(BUILD_DIR)/main.o $(BUILD_DIR)/init.o $(BUILD_DIR)/interrupt.o \
$(BUILD_DIR)/timer.o $(BUILD_DIR)/kernel.o $(BUILD_DIR)/print.o \
$(BUILD_DIR)/debug.o $(BUILD_DIR)/string.o $(BUILD_DIR)/memory.o \
$(BUILD_DIR)/bitmap.o $(BUILD_DIR)/thread.o $(BUILD_DIR)/list.o \
$(BUILD_DIR)/switch.o $(BUILD_DIR)/sync.o $(BUILD_DIR)/console.o \
$(BUILD_DIR)/keyboard.o $(BUILD_DIR)/ioqueue.o $(BUILD_DIR)/tss.o \
$(BUILD_DIR)/process.o $(BUILD_DIR)/syscall-init.o $(BUILD_DIR)/syscall.o \
$(BUILD_DIR)/stdio.o $(BUILD_DIR)/ide.o $(BUILD_DIR)/fs.o \
$(BUILD_DIR)/inode.o $(BUILD_DIR)/file.o $(BUILD_DIR)/dir.o
################ c代码编译 ##################
$(BUILD_DIR)/main.o: kernel/main.c lib/kernel/print.h \
lib/kernel/stdint.h kernel/init.h kernel/debug.h \
kernel/memory.h thread/thread.h kernel/interrupt.h \
device/console.h userprog/process.h lib/user/syscall.h \
userprog/syscall-init.h lib/stdio.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/init.o: kernel/init.c kernel/init.h lib/kernel/print.h \
lib/kernel/stdint.h kernel/interrupt.h device/timer.h \
kernel/memory.h thread/thread.h device/console.h \
device/keyboard.h userprog/tss.h userprog/syscall-init.h \
device/ide.h fs/fs.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/interrupt.o: kernel/interrupt.c kernel/interrupt.h \
lib/kernel/stdint.h kernel/global.h kernel/io.h \
lib/kernel/print.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/timer.o: device/timer.c device/timer.h lib/kernel/stdint.h \
kernel/io.h lib/kernel/print.h kernel/interrupt.h \
thread/thread.h kernel/debug.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/debug.o: kernel/debug.c kernel/debug.h \
lib/kernel/print.h kernel/interrupt.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/string.o: lib/string.c lib/string.h \
kernel/debug.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/memory.o: kernel/memory.c kernel/memory.h \
lib/kernel/stdint.h lib/kernel/bitmap.h kernel/debug.h \
lib/string.h thread/sync.h thread/thread.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/bitmap.o: lib/kernel/bitmap.c lib/kernel/bitmap.h \
lib/string.h kernel/interrupt.h lib/kernel/print.h \
kernel/debug.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/thread.o: thread/thread.c thread/thread.h \
lib/kernel/stdint.h lib/kernel/list.h lib/string.h \
kernel/memory.h kernel/interrupt.h kernel/debug.h \
lib/kernel/print.h userprog/process.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/list.o: lib/kernel/list.c lib/kernel/list.h \
lib/kernel/stdint.h kernel/interrupt.h kernel/debug.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/sync.o: thread/sync.c thread/sync.h \
lib/kernel/stdint.h thread/thread.h kernel/debug.h \
kernel/interrupt.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/console.o: device/console.c device/console.h \
lib/kernel/print.h thread/sync.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/keyboard.o: device/keyboard.c device/keyboard.h \
lib/kernel/print.h kernel/interrupt.h kernel/io.h \
lib/kernel/stdint.h device/ioqueue.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/ioqueue.o: device/ioqueue.c device/ioqueue.h \
lib/kernel/stdint.h thread/thread.h thread/sync.h \
kernel/interrupt.h kernel/debug.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/tss.o: userprog/tss.c userprog/tss.h \
lib/kernel/stdint.h thread/thread.h kernel/global.h \
lib/kernel/print.h lib/string.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/process.o: userprog/process.c userprog/process.h \
kernel/global.h lib/kernel/stdint.h thread/thread.h \
kernel/debug.h userprog/tss.h device/console.h \
lib/string.h kernel/interrupt.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/syscall.o: lib/user/syscall.c lib/user/syscall.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/syscall-init.o: userprog/syscall-init.c userprog/syscall-init.h \
lib/kernel/stdint.h lib/user/syscall.h thread/thread.h \
lib/kernel/print.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/stdio.o: lib/stdio.c lib/stdio.h \
lib/kernel/stdint.h lib/string.h kernel/debug.h \
lib/user/syscall.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/ide.o: device/ide.c device/ide.h \
lib/stdio.h kernel/debug.h kernel/global.h \
thread/sync.h kernel/io.h device/timer.h \
kernel/interrupt.h lib/string.h fs/super_block.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/fs.o: fs/fs.c fs/fs.h \
fs/inode.h fs/super_block.h fs/dir.h \
lib/stdio.h lib/string.h kernel/debug.h \
device/ide.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/inode.o: fs/inode.c fs/inode.h \
device/ide.h kernel/debug.h kernel/interrupt.h \
thread/thread.h lib/string.h lib/kernel/stdint.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/file.o: fs/file.c fs/file.h \
fs/inode.h device/ide.h thread/thread.h \
lib/stdio.h lib/kernel/stdint.h
$(CC) $(CFLAGS) $< -o $@
$(BUILD_DIR)/dir.o: fs/dir.c fs/dir.h \
fs/inode.h fs/file.h device/ide.h \
kernel/memory.h kernel/debug.h lib/stdio.h \
lib/string.h
$(CC) $(CFLAGS) $< -o $@
############## 汇编代码编译 ###############
$(BUILD_DIR)/kernel.o: kernel/kernel.S
$(AS) $(ASFLAGS) $< -o $@
$(BUILD_DIR)/print.o: lib/kernel/print.S
$(AS) $(ASFLAGS) $< -o $@
$(BUILD_DIR)/switch.o: thread/switch.S
$(AS) $(ASFLAGS) $< -o $@
############## 连接所有目标文件 #############
$(BUILD_DIR)/kernel.bin: $(OBJS)
$(LD) $(LDFLAGS) $^ -o $@
.PHONY : mk_dir hd clean all
mk_dir:
if [ ! -d $(BUILD_DIR) ]; then mkdir $(BUILD_DIR); fi
hd:
dd if=$(BUILD_DIR)/kernel.bin \
of=/home/hongbai/bochs/bin/os_hd_60M.img \
bs=512 count=200 seek=10 conv=notrunc
clean:
cd $(BUILD_DIR) && rm -f ./*
build: $(BUILD_DIR)/kernel.bin
all: mk_dir build hd
结语
现在是5月13日晚上8点,从前天晚上开始到现在,算是写完了14.3和14.4这部分。后面就是一个个功能的实现了,还是非常期待的。
这周能自由支配的时间比较短,所以一点点写吧,能写多少算多少。
感觉文件这部分想要学好,必须理解虚拟在内存的硬盘和内存之间的通信关系,只能说目前我只能是看懂代码copy一下,还需要进一步学习理解啊。
后续文件操作6章两篇博客,目录操作5章两篇博客,再有4篇博客我们就能完成文件系统这一部分了。