在当前目标检测领域中,YOLO系列模型因其优异的速度-精度平衡能力而被广泛部署于工业界与科研场景。YOLOv8作为该系列的最新版本,在主干网络与特征金字塔结构上进行了多项优化,进一步提升了其实时性与鲁棒性。然而,其核心组件—
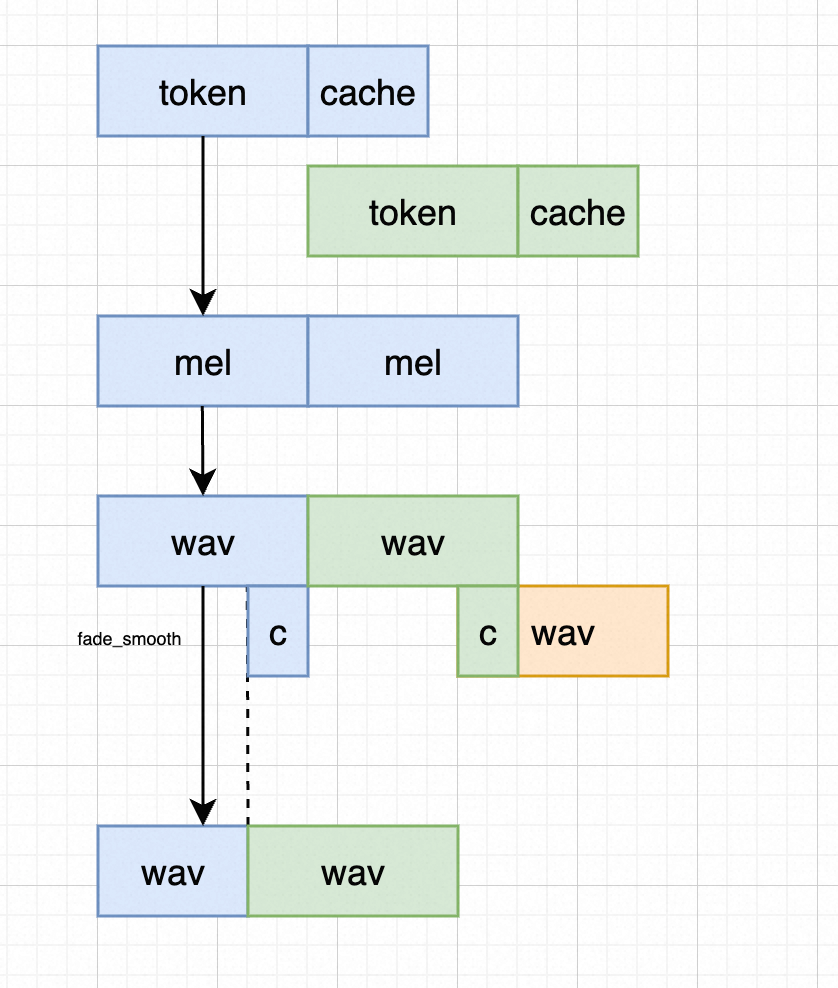
SPPF(Spatial Pyramid Pooling Fast)模块仍采用传统池化操作,导致模型在复杂场景下对小目标和遮挡目标的识别能力受限。为解决这一问题,本文提出一种新型的ILK-SPPF(Improved Large Kernel SPPF)模块 ,将UniRepLKNet中的大kernel感知机制 引入YOLOv8架构中,通过非膨胀卷积 与结构重参数化策略 显著提升模型的感受野与上下文建模能力。
1. SPP与SPPF结构演进及在YOLO中的应用
空间金字塔池化(Spatial Pyramid Pooling, SPP )用于解决CNN输入尺寸固定的问题,并增强特征图的空间不变性。该结构在多个目标检测框架中得到应用,如Fast R-CNN、YOLOv3等。随着轻量化需求的增长,Ultral

![[项目总结] 抽奖系统项目技术应用总结](https://i-blog.csdnimg.cn/direct/d01896bda0774fd68623d4d7c9fbb8b2.png)