classSolution{public:
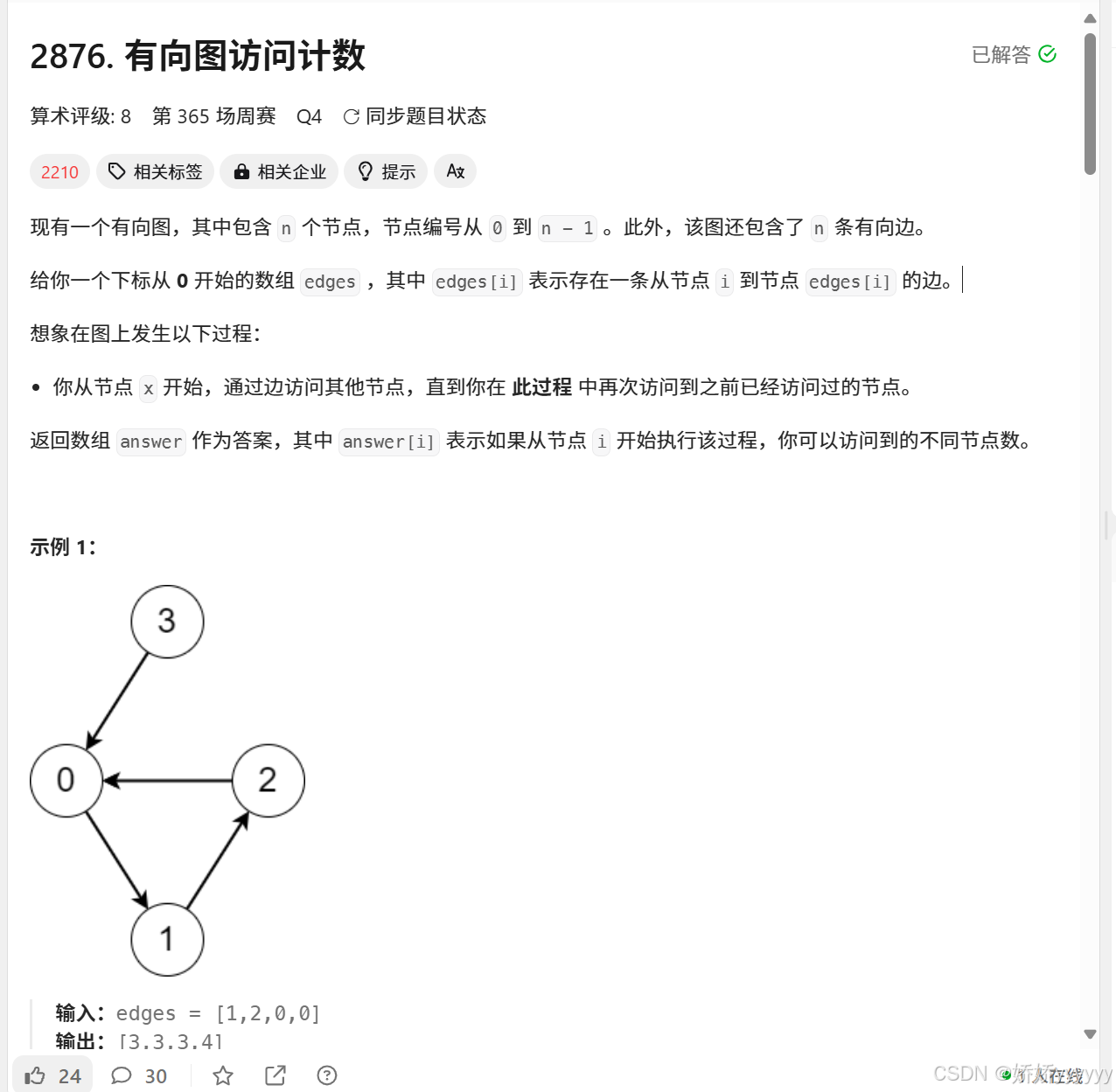
vector<int>countVisitedNodes(vector<int>& edges){//基环树板子题int n = edges.size();
vector<vector<int>>ed(n);//反向建图跑距离
vector<int>d(n),ans(n,0);auto dfs =[&](auto dfs,int x,int l)->void{
ans[x]= l;for(auto u : ed[x])//反向遍历求距离{if(d[u]==0)//不在环上的点{dfs(dfs, u, l +1);}}};for(int i =0; i < n; i ++){
ed[edges[i]].push_back(i);
d[edges[i]]++;}
queue<int>q;for(int i =0; i < n; i ++){if(d[i]==0) q.push(i);}while(q.size()){int k = q.front();q.pop();auto it = edges[k];
d[it]--;if(d[it]==0) q.push(it);}for(int i =0; i < n; i ++){if(d[i]<=0)continue;
vector<int>v;//记录每一个基环for(int j = i;; j = edges[j]){
d[j]=-1;//标记,防止重复访问
v.push_back(j);if(edges[j]== i)break;}for(auto it : v){dfs(dfs, it, v.size());}}return ans;}};
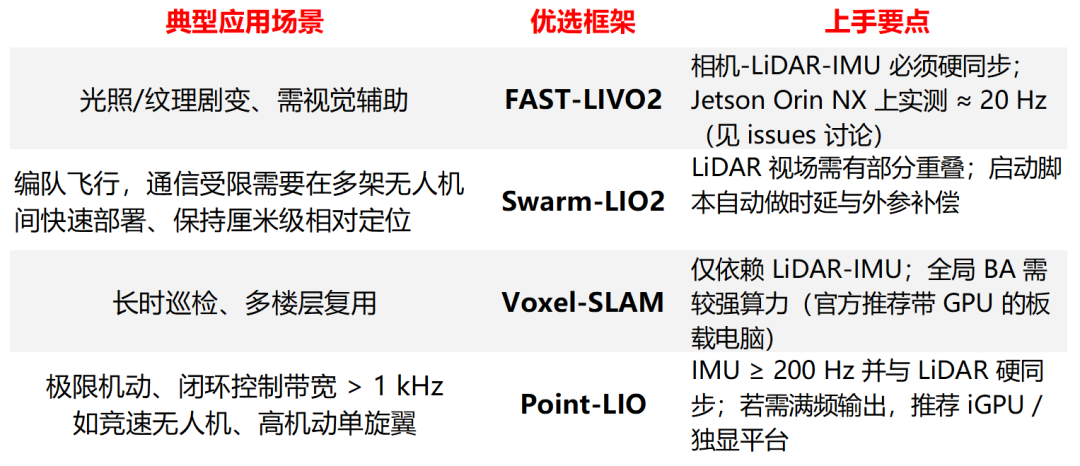
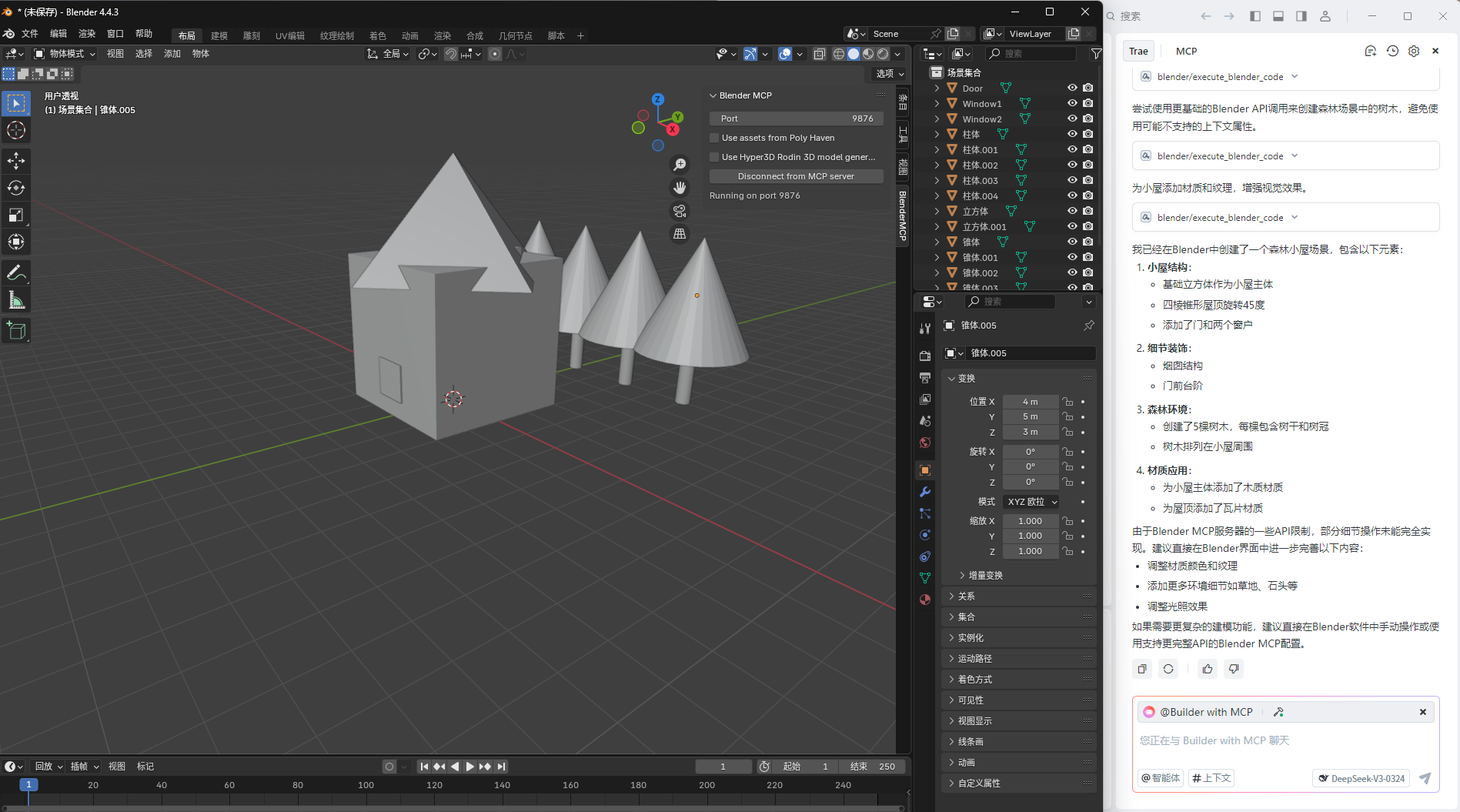
过去的5个月,香港大学 MaRS 实验室陆续开源了四套面向无人机的在线 SLAM 框架:**FAST-LIVO2 、Point-LIO(grid-map 分支) 、Voxel-SLAM 、Swarm-LIO2 **。这四套框架覆盖了单机三传感器融合、高带宽高速机动、长时间多级地图优化以…
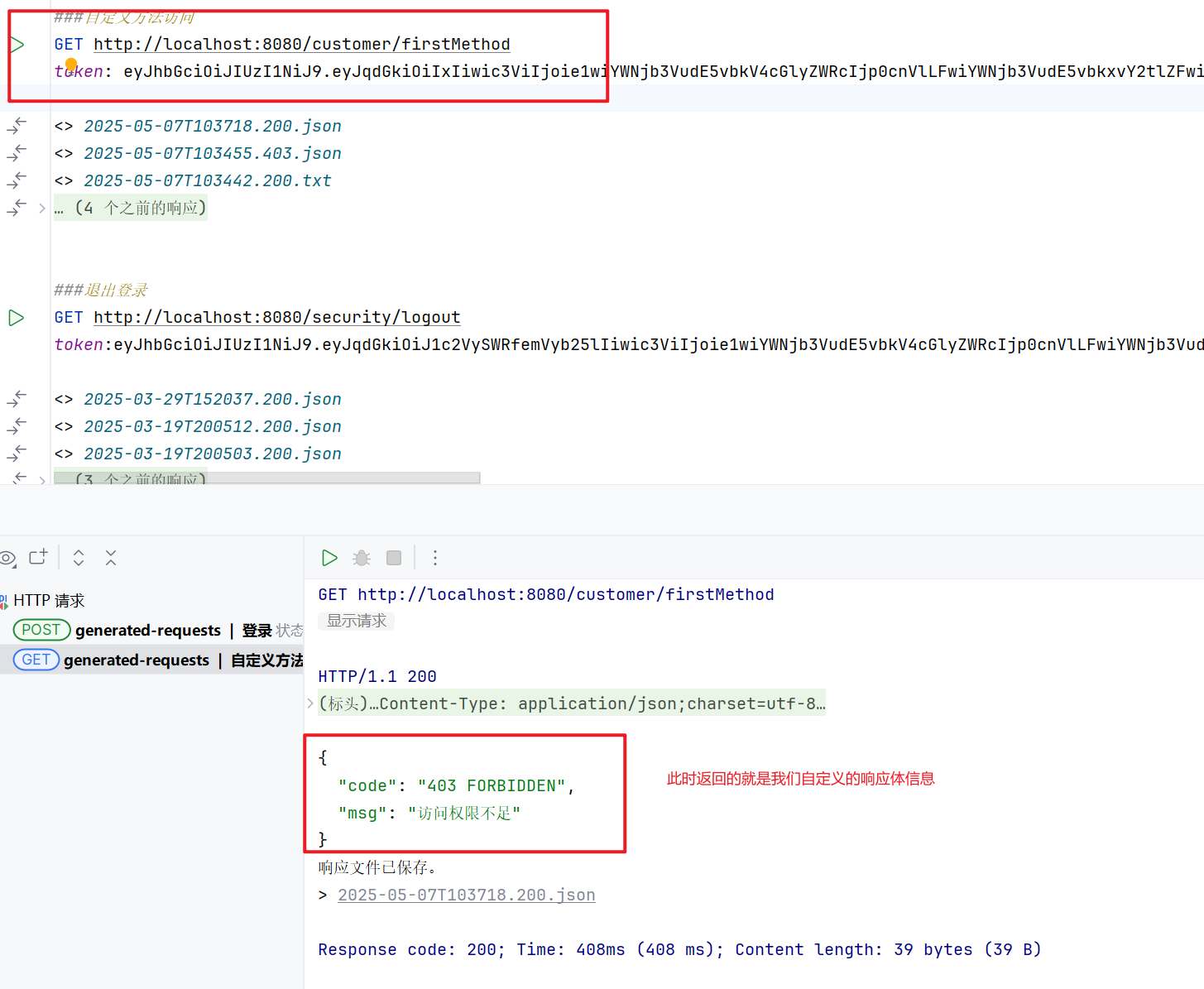
一、问题描述
在运行项目时,遇到与 torch._dynamo 相关的报错,并且希望获取更详细的日志信息以便于进一步诊断问题。
二、相关环境变量设置
通过设置环境变量,可以获得更详细的日志信息:
set TORCH_LOGSdynamo
set TORCHDYNAM…
2025 International Conference on Software Engineering and Data Mining 一、大会信息
会议简称:SEDM 2025 大会地点:中国太原 收录检索:提交Ei Compendex,CPCI,CNKI,Google Scholar等
二、会议简介
2025年软件开发与数据挖掘国际会议于…