一、系统概述
本代码实现了一个基于Pygame的2D自主机器人模拟系统,具备以下核心功能:
-
双模式控制:支持手动控制(WASD键)和自动导航模式(鼠标左键设定目标)
-
智能路径规划:采用改进型A*算法进行全局路径规划
-
动态避障:基于LIDAR传感器的实时障碍物检测与智能规避
-
状态恢复:具备卡死检测与自主恢复机制
-
数据记录:支持运动轨迹和状态参数的CSV格式记录
-
可视化交互:实时显示机器人状态、传感器数据和环境信息
二、核心功能分析
-
机器人控制系统
-
状态机管理:包含7种状态(Manual/Recovery/Avoiding/Stuck等)
-
运动控制:
-
自动模式:PID式转向控制,速度与距离自适应
-
手动模式:独立速度参数(前进4px/frame,后退2px/frame)
-
-
传感器系统:
-
360° LIDAR扫描(5°分辨率,150px范围)
-
前向90°安全检测区域(半径25px)
-
-
-
避障机制
-
间隙导航策略:
-
扫描前方±90°区域
-
识别最大可通过间隙(>30°)
-
朝向间隙中心点导航
-
-
应急策略:
-
最近障碍物反向规避
-
完全阻塞时最大距离导航
-
-
-
路径规划系统
-
改进型A*算法:
-
网格尺寸20px
-
8方向移动(含对角线)
-
障碍物膨胀处理(机器人半径补偿)
-
-
动态重规划:
-
固定间隔重规划(3秒)
-
障碍物变化即时重规划
-
卡死状态强制重规划
-
-
-
异常处理系统
-
卡死检测:
-
1.5秒无位移判定
-
随机方向恢复旋转(0.75秒)
-
-
碰撞预测:
-
前向运动预检测
-
边界限制(屏幕范围)
-
-
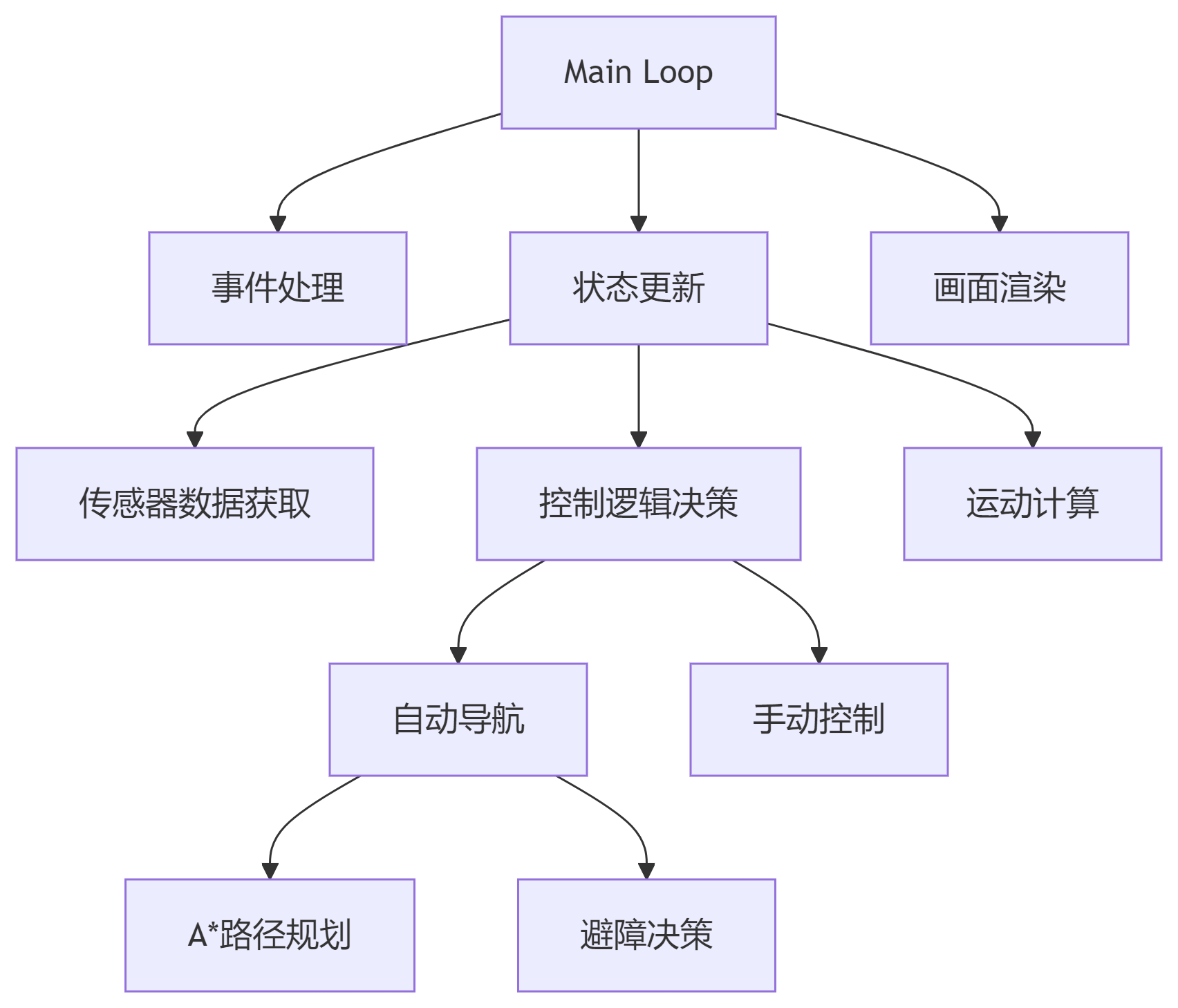
三、技术实现细节
-
架构设计
-
性能参数
类别 参数 值 物理 机器人半径 15px 运动 基础转向速度 4°/frame 传感器 LIDAR分辨率 5° 路径规划 网格尺寸 20px 系统 刷新率 60FPS
四、代码结构分析
-
模块组成
-
参数定义区:全局配置参数
-
Robot类:核心控制逻辑(1200+行)
-
Obstacle类:障碍物对象
-
A*算法:独立路径规划函数
-
主循环:Pygame事件管理与渲染
-
-
**关键设计模式
-
状态模式:通过状态标志位管理行为逻辑
-
观察者模式:按键事件驱动状态切换
-
策略模式:可替换的路径规划算法
-
五、优缺点评估
优势:
-
模块化设计:各功能组件解耦良好
-
完备的异常处理:多级安全机制
-
可视化调试:实时显示传感器数据
-
参数可配置性:54个可调参数
改进空间:
-
计算效率:LIDAR扫描未做优化(720次/帧碰撞检测)
-
运动控制:缺乏速度插值,急停急起
-
路径规划:未考虑动态障碍物
-
代码结构:部分逻辑耦合度过高(如update方法)
六、优化建议
-
性能优化
-
空间划分:使用四叉树加速碰撞检测
-
LIDAR优化:增量式扫描+缓存机制
-
多线程:路径规划独立线程运行
-
-
功能扩展
# 动态障碍物示例 class DynamicObstacle(Obstacle): def update(self): self.x += self.vx self.rect.x = self.x if random.random() < 0.02: # 2%概率改变方向 self.vx *= -1 -
算法改进
-
路径规划:D* Lite动态重规划算法
-
运动控制:速度轨迹规划(S曲线)
-
传感器融合:IMU数据补偿
-
-
代码重构
-
状态机独立类封装
-
控制策略抽象接口
-
配置参数类化管理
-
七、应用场景展望
-
教育领域:机器人算法教学平台
-
研究领域:SLAM算法验证平台
-
工业应用:AGV调度系统仿真
-
游戏开发:NPC智能导航引擎
附录:典型运行数据
Timestamp_ms,Frame,Mode,State,Pos_X,Pos_Y,Angle_Deg,Target_X,Target_Y,Path_Len 1718285300123,456,Auto,Avoiding,342.15,287.63,45.2,500,320,8 1718285300156,457,Auto,PathFollowing,345.78,290.12,43.8,500,320,7
该代码展现了一个完整的自主机器人系统原型,具备良好的扩展性和研究价值。建议后续重点优化算法效率,并增加传感器噪声模拟以提升真实性。

![[学成在线]22-自动部署项目](https://i-blog.csdnimg.cn/img_convert/b62cc68e0394c29a22b5b180ab2c689c.png)