本文目前仅包含2个体素编码器、2个中间编码器、1个主干网络、1个颈部网络和1个检测头。如果有机会,会继续补充更多模型。
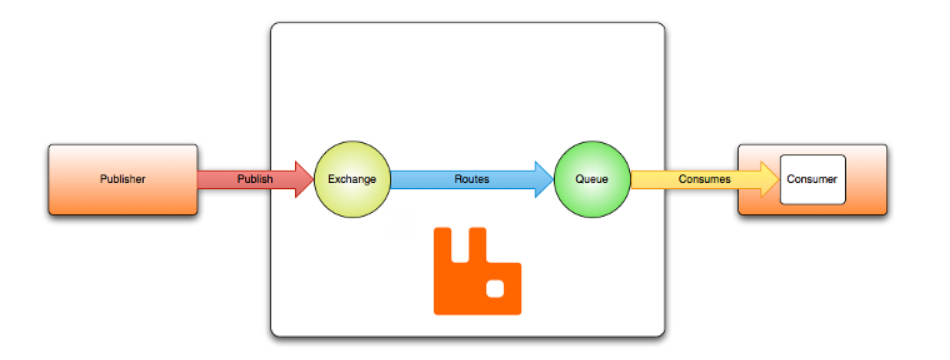
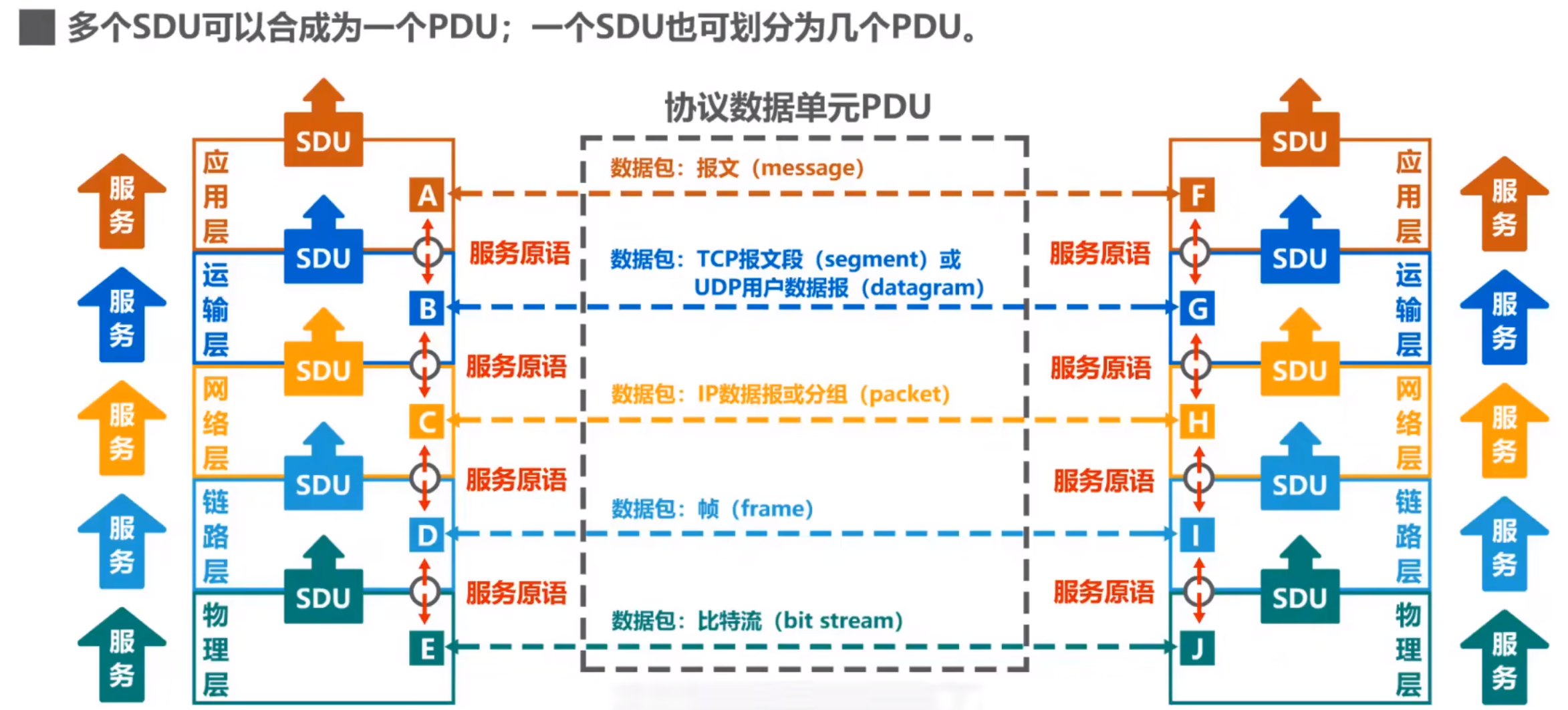
MMDetection3D的点云数据一般会经历如下步骤/模块:
训练阶段
测试阶段
点云
体素化
体素编码器
中间编码器
主干网络
颈部网络
检测头
损失函数计算
预测结果生成
下面分别介绍每个部分的一些典型模型。
在介绍体素编码器前,需要先介绍体素化函数,以理解体素编码器的输入参数含义。
0.1 mmcv.ops.voxelize中的Voxelization类
参数名称 数据类型 默认值 含义 取值说明 max_voxels (int, int) - 最大体素数 两个元素分别表示训练时和测试时的最大体素数 max_num_points int - 体素内最大点数 记为
M
M
M point_cloud_range List(float) – 点云范围 列表长为6,依次表示
x
,
y
,
z
x,y,z
x , y , z
x
,
y
,
z
x,y,z
x , y , z [x_min,y_min,z_min,x_max,y_max,z_max] voxel_size List(float) - 每个体素的大小 列表长为3,依次表示体素的
x
,
y
,
z
x,y,z
x , y , z [x_size,y_size,z_size]
注:将体素大小z_zise设置为与点云高度范围相同时,就可以实现柱体化操作。
参数名称 数据类型 默认值 含义 取值说明 input Tensor(float) - 点云特征
(
n
p
,
C
)
(n_p,C)
( n p , C )
n
p
n_p
n p
C
C
C features Tensor(float) 返回值1 每个体素内的点
(
n
,
M
,
C
)
(n,M,C)
( n , M , C )
n
n
n
i
i
i
m
i
<
M
m_i<M
m i < M features[i,j,:](
j
≥
m
i
j\geq m_i
j ≥ m i num_points Tensor(int) 返回值2 每个体素内的点数
(
n
,
)
(n,)
( n , )
i
i
i num_points[i](即上文的
m
i
m_i
m i coors Tensor(int) 返回值3 每个体素的3维位置索引
(
n
,
3
)
(n,3)
( n , 3 ) z_id,y_id,x_id
初始化:初始化mmcv.ops.voxelize中的Voxelization类为self.points_voxel_layer voxelize函数: 参数名称 数据类型 默认值 含义 取值说明 points List(Tensor(float)) - 一个batch的点云 列表长为batch size,其第
i
i
i
(
n
i
,
p
,
C
)
(n_{i,p},C)
( n i , p , C ) voxels Tensor(float) 返回值1 每个体素内的点
(
N
,
M
,
C
)
(N,M,C)
( N , M , C )
N
N
N
N
=
∑
i
n
i
N=\sum_i n_i
N = ∑ i n i num_points Tensor(int) 返回值2 每个体素内的点数 大小为
(
N
,
)
(N,)
( N , ) coors Tensor(int) 返回值3 每个体素的batch索引和3维位置索引
(
N
,
4
)
(N,4)
( N , 4 ) batch_id,z_id,y_id,x_id
作用:将体素内的点取平均作为体素特征。通常搭配SparseEncoder中间编码器。 初始化参数: 参数名称 数据类型 默认值 含义 取值说明 num_features int - 点云的特征维度 记为
C
C
C
参数名称 数据类型 默认值 含义 取值说明 features Tensor(float) - 每个体素内的点 大小为
(
N
,
M
,
C
)
(N,M,C)
( N , M , C ) num_points Tensor(int) - 每个体素内的点数 大小为
(
N
,
)
(N,)
( N , ) coors Tensor(int) - 每个体素的batch索引和3维位置索引 大小为
(
N
,
4
)
(N,4)
( N , 4 ) 返回值 Tensor(float) 返回值 非空体素特征 大小为
(
N
,
C
)
(N,C)
( N , C )
用于点云的柱体表达编码。通常搭配PointPillarsScatter中间编码器。
参数名称 数据类型 默认值 含义 取值说明 in_channels int - 柱体的特征维度 记为
C
C
C feat_channels Tuple(int) - - 长度表示图中PFN的数量
N
N
N
i
i
i
i
i
i with_distance bool False 表示是否将点到原点的距离附加在点的通道维度 - with_cluster_center bool True 表示是否将点到体素质心的三维偏移量附加在点的通道维度 - with_voxel_center bool True 表示是否将点到体素中心的三维偏移量附加在点的通道维度 - voxel_size List(float) - 每个体素的大小 列表长为3,依次表示体素的
x
,
y
,
z
x,y,z
x , y , z [x_size,y_size,z_size] point_cloud_range Tuple(float) - 点云范围 长为6,依次表示
x
,
y
,
z
x,y,z
x , y , z
x
,
y
,
z
x,y,z
x , y , z [x_min,y_min,z_min,x_max,y_max,z_max] norm_cfg dict 归一化类型默认为BN1d 设置归一化类型 配置文件格式 mode str 池化类型默认为最大池化 设置池化类型 'max’表示最大池化,'avg’表示均值池化 legacy bool True - 若为True,会导致with_cluster_center=True时影响到原始特征,且若此时with_distance=True,则附加的特征会变为到体素中心的距离而非到原点的距离;为False时结果正常
forward函数:与HardSimpleVFE的forward函数输入和输出含义相同。
参数名称 数据类型 默认值 含义 取值说明 in_channels int - 输入通道数 记为
C
C
C sparse_shape List(int) - 体素空间的shape 列表长为3,依次表示
z
,
y
,
x
z,y,x
z , y , x order Tuple(str) (‘conv’, ‘norm’, ‘act’) 表示卷积、归一化和激活函数的顺序 - norm_cfg dict 归一化类型默认为BN1d 归一化类型设置 配置文件格式 base_channel int - 第一个卷积的输出通道数 - output_channels int - 最后一个卷积的输出通道数 - encoder_channels Tuple(Tuple(int)) - 每层的输出通道维度 外层元组长度为阶段数(图中
N
N
N
L
L
L encoder_paddings Tuple(Tuple(int)) - 每层的填充值 内外层元组长度分别与encoder_channels相同 block_type str - 使用的模块类型 可为’conv_module’或’basicblock’(区别如图)
参数名称 数据类型 默认值 含义 取值说明 voxel_features Tensor(float) - 非空体素特征
(
N
,
C
)
(N,C)
( N , C )
N
N
N coors Tensor(int) - 非空体素坐标
(
N
,
4
)
(N,4)
( N , 4 ) batch_size int - batch size 记为
B
B
B spatial_features Tensor(float) 返回值 BEV特征图 大小为
(
B
,
C
′
,
H
,
W
)
(B,C',H,W)
( B , C ′ , H , W )
H
H
H y_size),
W
W
W x_size)
2.2 PointPillarsScatter
用于点云的柱体表达编码。可搭配PillarFeatureNet体素编码器。
作用:将柱体特征根据柱体坐标和batch_id生成BEV特征图。 初始化参数: 参数名称 数据类型 默认值 含义 取值说明 in_channels int - 输入通道数 - output_shape List(int) - 输出BEV特征图的大小 长度为2,分别为BEV特征图的宽度
H
H
H y_size)和长度
W
W
W x_size)
forward函数:与SparseEncoder的forward函数输入和输出含义相同。
SECOND主干网络通常搭配SECONDFPN颈部网络。前面可搭配体素操作(如HardSimpleVFE + SparseEncoder)或柱体操作(如PillarFeatureNet + PointPillarsScatter)。
参数名称 数据类型 默认值 含义 取值说明 in_channels int - 输入的体素特征维度 - out_channels List(int) - 每个阶段的输出通道数 长度为图中
L
L
L layer_nums List(int) - 每阶段的卷积层数(图中
N
N
N 长度与out_channels相同 layer_strides List(int) - 每阶段第一个卷积的步长 长度与out_channels相同 conv_cfg dict 默认卷积类型为Conv2d 设置卷积类型 配置文件格式 norm_cfg dict 默认归一化类型为BN 设置归一化类型 配置文件格式
参数名称 数据类型 默认值 含义 取值说明 x Tensor(float) - 点云的BEV表达
(
B
,
C
,
H
,
W
)
(B,C,H,W)
( B , C , H , W ) 返回值 List(Tensor(float)) 返回值 输出为点云的多尺度BEV特征 列表长度等于尺度数,每个尺度特征图大小为
(
B
,
C
i
,
H
i
,
W
i
)
(B,C_i,H_i,W_i)
( B , C i , H i , W i )
SECONDFPN颈部网络通常搭配SECOND主干网络。
参数名称 数据类型 默认值 含义 取值说明 in_channels List(int) - 表示各尺度特征通道数 与SECOND的out_channels相同 out_channels List(int) - 每个DeConv的输出通道数 长度为图中
L
L
L upsample_strides List(int) - 上采样步长 每个上采样块的上采样比例 conv_cfg dict 默认卷积类型为Conv2d 设置卷积类型 配置文件格式 norm_cfg dict 默认归一化类型为BN 设置归一化类型 配置文件格式 upsample_cfg dict 默认上采样方式为DeConv 上采样方式 配置文件格式 use_conv_for_no_stride bool False - -
use_conv_for_no_stride=False且upsample_stride=1时,或upsample_stride>1时使用upsample_cfg搭建DeConv卷积,否则(即use_conv_for_no_stride=True且upsample_stride=1,或upsample_stride<1)使用conv_cfg搭建Conv2d卷积
参数名称 数据类型 默认值 含义 取值说明 x List(Tensor(float)) - 点云多尺度BEV特征 列表长度为尺度数,可直接使用SECOND的输出 返回值 List(Tensor(float)) 返回值 多尺度融合后的BEV特征 列表长度为1
检测头模块需要注意两点:
CenterPoint的检测头。可搭配SECOND + SECONDFPN结构使用。
参数名称 数据类型 默认值 含义 取值说明 in_channels List(int) - 输入通道数 与颈部网络的输出通道数相同 shared_conv_channel int - 第一个共享卷积的输出通道维度 - bias str ’auto’ 第一个共享卷积层的偏置项设置 - tasks List(dict) - dict为{'num_class': int, 'class_names': List(str)}的结构;列表的每一个元素对应图中的一个SeperateHead结构(即对不同的类别,head的网络参数可能不同) num_heatmap_convs int - 每个中心热图头的卷积数 - common_heads dict - - 可包含如’reg’(BEV位置偏差)、‘hei’(离地高度)、‘dim’(尺寸)、‘rot’(旋转角)、‘vel’(速度)等项;每一项的值为二元组(int,int):第一元素为最终维度,第二元素为head中的卷积层数(对应图中
N
N
N norm_bbox bool True 是否对数归一化边界框尺寸作为估计值 - conv_cfg dict 默认卷积类型为Conv2d 设置卷积类型 配置文件格式 norm_cfg dict 默认归一化类型为BN2d 设置归一化类型 配置文件格式 bbox_coder dict 默认BBOX_CODERS类型为CenterPointBBoxCoder类 设置BBOX_CODERS类型 配置文件格式 loss_cls dict 默认LOSS类型为GaussianFocalLoss 设置分类任务的LOSS类型 配置文件格式 loss_bbox dict 默认LOSS类型为L1Loss 设置回归任务的LOSS类型 配置文件格式 seperate_head dict 默认为SeperateHead类 设置SeperateHead的参数 配置文件格式,其中需要手动设置的初始化参数包括:head_conv为Head卷积的中间维度;final_kernal为Head卷积核大小
train_cfg和test_cfg均为字典格式,这里单独拿出来介绍:
参数名称 数据类型 含义 取值说明 grid_size List(int) 原始体素空间的shape 列表长为3,依次表示
x
,
y
,
z
x,y,z
x , y , z point_cloud_range List(float) 点云范围 列表长为6,依次表示
x
,
y
,
z
x,y,z
x , y , z
x
,
y
,
z
x,y,z
x , y , z [x_min,y_min,z_min,x_max,y_max,z_max] voxel_size List(float) 体素大小 列表长为3,依次表示体素的
x
,
y
,
z
x,y,z
x , y , z [x_size,y_size,z_size] out_size_factor int 下采样倍数 最后BEV预测的大小为grid_size//out_size_factor max_objs int 最大检测物体数量 会取至多max_objs个物体计算热图回归目标 dense_reg float 与max_objs相乘作为最终的最大检测数量 可固定为1,仅设置max_objs即可 gaussian_overlap float 计算高斯半径时的参数 与真实物体尺寸一起用于计算高斯半径,从而生成热图的真值 min_radius float 最小高斯半径 防止上述计算出来的高斯半径过小 code_weights List(float) 计算损失时的各项权重 长度与边界框参数编码项数相同,如边界框编码包含3维位置、3维尺度,以及朝向角的正余弦值则长度应为8
参数名称 数据类型 含义 取值说明 post_center_limit_range List(float) 后处理时物体中心的范围 列表长为6,依次表示
x
,
y
,
z
x,y,z
x , y , z
x
,
y
,
z
x,y,z
x , y , z [x_min,y_min,z_min,x_max,y_max,z_max];该范围一般略大于点云范围 nms_type str NMS方法的类型 只能是’circle’(CenterPoint文章提到的NMS方法)或’rotate’(常规的NMS方法) nms_thr float rotate NMS的IoU阈值 仅在nms_type='rotate’时需要设置 score_threshold float rotate NMS的分数筛选阈值 仅在nms_type='rotate’时需要设置,nms前仅筛选满足分数大于该阈值的物体 pre_max_size int rotate NMS前考虑的最大物体数量 仅在nms_type='rotate’时需要设置,多余的预测会被丢弃(若需要全部考虑,可设置为None) post_max_size int rotate NMS或circle NMS后保留的最大物体数量 - min_radius List(float) circle NMS的最小半径 仅在nms_type='circle’时需要设置,长度为tasks数;第
i
i
i
i
i
i
参数名称 数据类型 默认值 含义 取值说明 feats List(Tensor(float)) - (多尺度)特征图 通常为颈部网络的输出 返回值 Tuple(List(dict)) 返回值 BEV上的预测结果 外层元组长为任务数,内层列表长为尺度数,字典的键为’heatmap’以及common_heads中的键(如’reg’、‘hei’、‘dim’、‘rot’),值为相应Head的输出Tensor(大小为
(
B
,
∗
,
h
,
w
)
(B,*,h,w)
( B , ∗ , h , w )
参数名称 数据类型 默认值 含义 取值说明 pred_dicts Tuple(List(dict)) - BEV下的预测结果 检测头模块forward函数的输出结果 gt_bboxes_3d List(Tensor(float)) - 真实边界框参数 列表长为batch size,Tensor为
(
n
b
,
box_dim
)
(n_b,\textup{box\_dim})
( n b , box_dim )
n
b
n_b
n b gt_labels_3d List(Tensor(int)) - 真实边界框类别标签 列表长为batch size,Tensor为
(
n
b
,
)
(n_b,)
( n b , ) 返回值 dict 返回值 损失字典 包含各任务的分类损失和回归损失,格式为{'task0.loss_heatmap': float, 'task0.loss_bbox': float, 'task1.loss_heatmap': float, ...}
参数名称 数据类型 默认值 含义 取值说明 pred_dicts Tuple(List(dict)) - BEV预测下的预测结果 检测头模块forward函数的输出结果 img_metas List(dict) - 数据信息 检测器模型forward函数输入中的img_meta项;列表长为batch size 返回值 List(List(Tensor)) - 最终的检测结果 外层列表长为batch_size,内层列表长为3,分别是预测的边界框参数
(
n
b
pred
,
box_dim
)
(n_b^\textup{pred},\textup{box\_dim})
( n b pred , box_dim )
(
n
b
pred
,
)
(n_b^\textup{pred},)
( n b pred , )
(
n
b
pred
,
)
(n_b^\textup{pred},)
( n b pred , )








![[附源码]java毕业设计乒乓球俱乐部管理系统](https://img-blog.csdnimg.cn/5951e63798284ee1a8ca88ad1878b918.png)