LFMCW雷达测速基础
- 1 基本测速原理——多普勒频移
- 1.0 写在前面
- 1.1 多普勒效应
- 1.2 多普勒频移
- 疑问
- 2 LFMCW雷达测速原理
- 2.1 Doppler Shift 到底是调频还是调相
- 2.2 为什么是二维FFT
1 基本测速原理——多普勒频移
1.0 写在前面
- 振动/波在空间中传播有三个关键变量,分别是波长、波速、频率。三者的数学关系如下
V = λ f V=\lambda f V=λf
毫米波本质上是一种电磁波,因此其波速等于光速,为3x10的8次方。速度一定的情况下,一定时间内波在空间中传播的距离是一定的。一个周期T内传播的距离就是一个波长,所以,波长本质上表示距离。
1.1 多普勒效应
多普勒效应(Doppler effect)是波源与观察者有相对运动时,观察者接受到波的频率与波源发出的频率并不相同的现象。生活中比较常见的例子是远方急驶过来的火车鸣笛声变得尖细(即频率变高,波长变短),而离我们而去的火车鸣笛声变得低沉(即频率变低,波长变长)。
1.2 多普勒频移
1.1节所述为多普勒效应的内容,可以知道多普勒效应的本质是波源与观察者之间波的频率的差别,本节详细解释相对运动与频率的数学关系。
初始关系如下图所示,
波
源
S
保
持
静
止
,
V
s
=
0
,
均
匀
向
四
周
辐
射
波
长
为
λ
s
,
波
速
为
V
的
波
有
两
个
接
收
源
X
和
Y
,
均
保
持
静
止
,
他
们
接
收
到
波
源
S
辐
射
的
波
长
为
λ
o
由
于
此
时
源
和
接
收
者
之
间
没
有
相
对
运
动
,
因
此
λ
s
=
λ
o
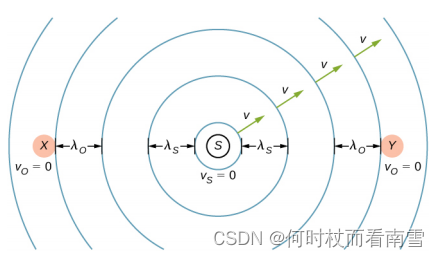
\begin{array}{c} 波源S保持静止,V_{s} = 0,均匀向四周辐射波长为\lambda _{s},波速为V的波\\ 有两个接收源X和Y,均保持静止,他们接收到波源S辐射的波长为\lambda _{o}\\ 由于此时源和接收者之间没有相对运动,因此\lambda _{s} = \lambda _{o} \end{array}
波源S保持静止,Vs=0,均匀向四周辐射波长为λs,波速为V的波有两个接收源X和Y,均保持静止,他们接收到波源S辐射的波长为λo由于此时源和接收者之间没有相对运动,因此λs=λo
从
某
一
时
刻
开
始
,
波
源
S
以
V
s
的
速
度
向
Y
运
动
,
运
动
时
间
为
一
个
周
期
T
s
,
其
他
参
数
不
变
四
幅
图
分
别
表
示
T
=
0
,
T
=
T
s
,
T
=
2
T
s
,
T
=
3
T
s
,
图
中
实
线
表
示
对
应
时
刻
波
辐
射
的
位
置
。
虚
线
表
示
对
应
时
刻
之
前
波
辐
射
的
位
置
\begin{array}{c} 从某一时刻开始,波源S以V_{s}的速度向Y运动,运动时间为一个周期T _{s},其他参数不变\\ 四幅图分别表示T = 0,T=T _{s},T=2T _{s},T=3T _{s},\\ 图中实线表示对应时刻波辐射的位置。虚线表示对应时刻之前波辐射的位置 \end{array}
从某一时刻开始,波源S以Vs的速度向Y运动,运动时间为一个周期Ts,其他参数不变四幅图分别表示T=0,T=Ts,T=2Ts,T=3Ts,图中实线表示对应时刻波辐射的位置。虚线表示对应时刻之前波辐射的位置
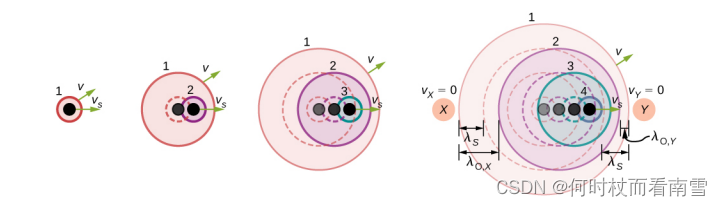
根据图片内容,很容易得出,相对于X
λ
o
=
λ
s
+
Δ
x
v
T
o
=
v
T
s
+
v
s
T
s
v
f
o
=
v
f
s
+
v
s
f
s
=
v
+
v
s
f
s
f
o
=
f
s
(
v
v
+
v
s
)
\begin{aligned} \lambda_{o} &=\lambda_{s}+\Delta x \\ v T_{o} &=v T_{s}+v_{s} T_{s} \\ \frac{v}{f_{o}} &=\frac{v}{f_{s}}+\frac{v_{s}}{f_{s}}=\frac{v+v_{s}}{f_{s}} \\ f_{o} &=f_{s}\left(\frac{v}{v+v_{s}}\right) \end{aligned}
λovTofovfo=λs+Δx=vTs+vsTs=fsv+fsvs=fsv+vs=fs(v+vsv)
相对于Y,有
λ
o
=
λ
s
−
Δ
x
v
T
o
=
v
T
s
−
v
s
T
s
v
f
o
=
v
f
s
−
v
s
f
s
=
v
−
v
s
f
s
f
o
=
f
s
(
v
v
−
v
s
)
.
\begin{aligned} \lambda_{o} &=\lambda_{s}-\Delta x \\ v T_{o} &=v T_{s}-v_{s} T_{s} \\ \frac{v}{f_{o}} &=\frac{v}{f_{s}}-\frac{v_{s}}{f_{s}}=\frac{v-v_{s}}{f_{s}} \\ f_{o} &=f_{s}\left(\frac{v}{v-v_{s}}\right) . \end{aligned}
λovTofovfo=λs−Δx=vTs−vsTs=fsv−fsvs=fsv−vs=fs(v−vsv).
疑问
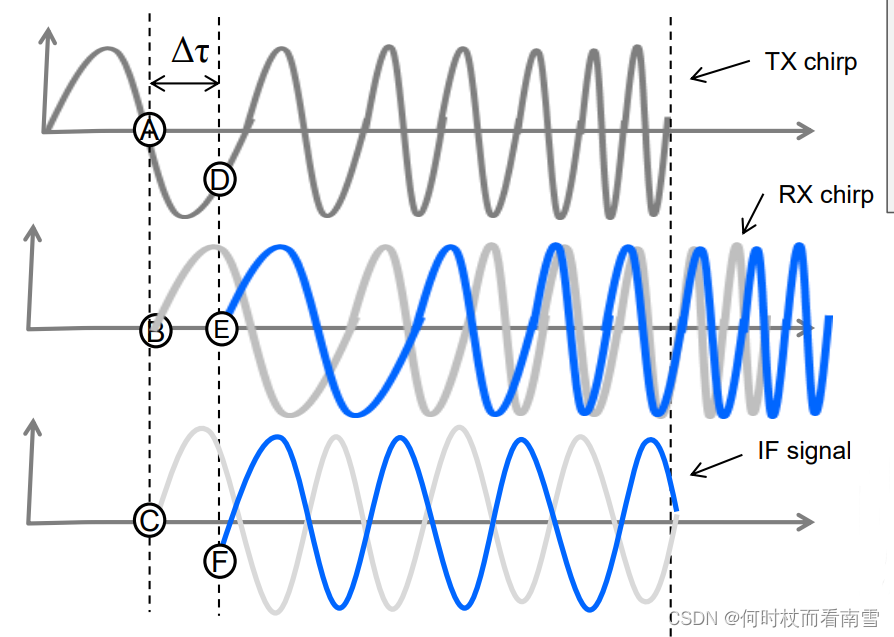
从上面的分析和众多的资料中都显示,多普勒频移是直接影响到一个连续波的频率,波的相位仍然保持连续,如下图所示。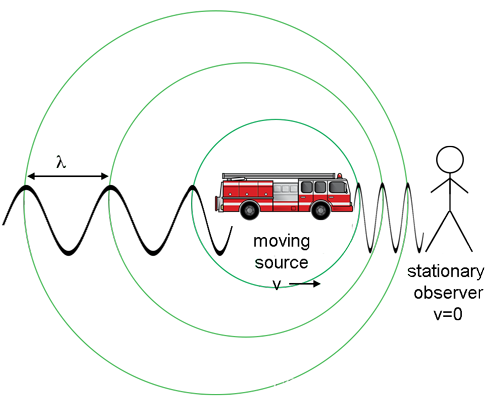

不知道有没有人跟我一样对Doppler shift 频率改变相位连续表示过怀疑,这些怀疑基于:
- 波在离开波源后,理想情况下是没有任何外作用力可以改变波的任何参数,就像断了线的风筝一样不受控制,自由在空间中极化与传播,因此Doppler频移一定不是在传播过程中被改变的。
- 正常情况下,一个未被频率调制的波在空间中的传播可以理解为一个sin函数,如果是在真空中传播且没有遮挡,那么理论上这个sin函数是可以传播无限远的。
- 波源移动导致相邻波之间有一个Vs*T的波程差,最终的波不应该是相位上有差别而频率不会被改变吗?
解答:
波源是在移动过程中产生波,以上的讨论波是连续生成的,所以在波源移动过程中,波相当于被调制了,因此产生那样的Doppler shift。
2 LFMCW雷达测速原理
2.1 Doppler Shift 到底是调频还是调相
个人拙见,Doppler Shift本质上是调相,由于上面1节是关于波源发射连续波并以恒定速度进行运动的理想场景,对波调相刚好可以等效为调频,因此叫Doppler 频移,但是LFMCW调频波的发送是间隔的非连续的,因此虽然LFMCW雷达的也叫Dopple shift,但其本质上已经是在分析相位的变化了。
这一点,我们可以从德州仪器关于TI毫米波雷达测速方面的讲解视频得知。所以需要分析相位随时间变化的关系。
2.2 为什么是二维FFT
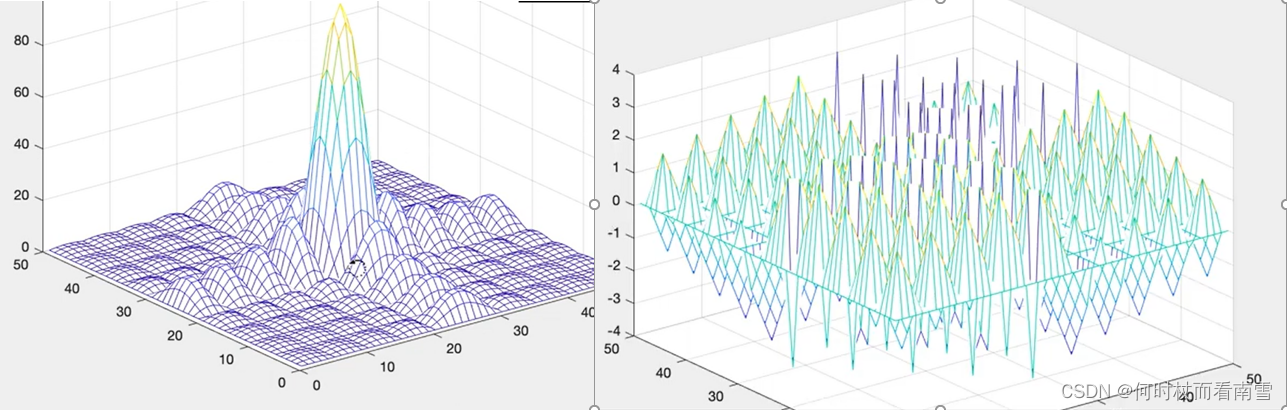
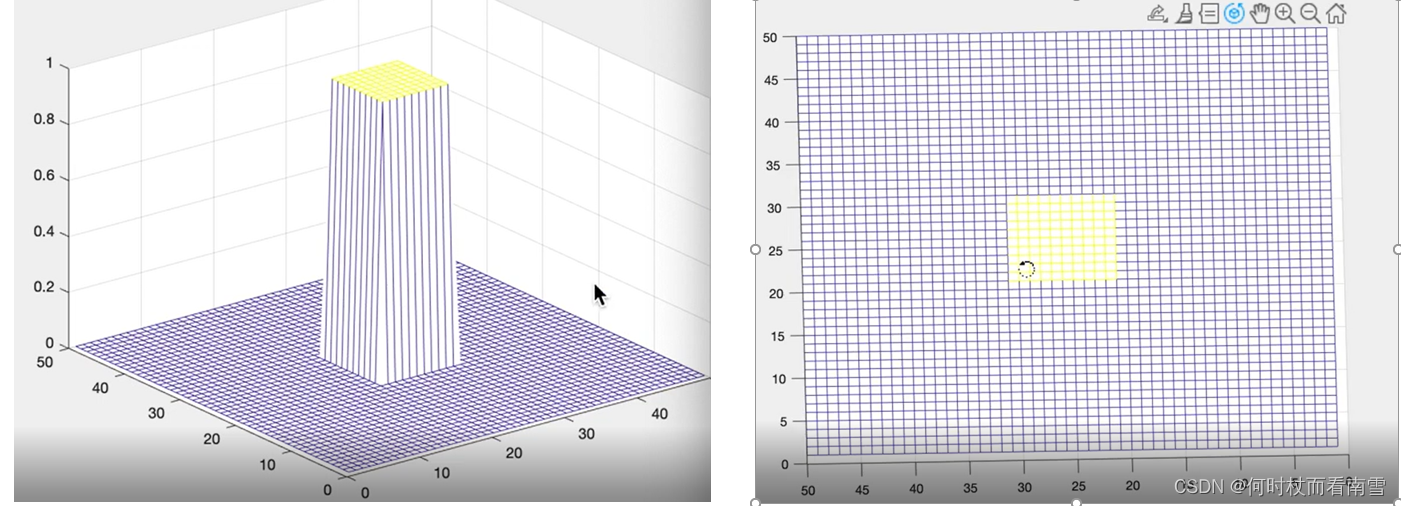
对于矩阵数据的二维FFT处理更多的其实是在Image Processing这个领域当中,图像处理领域认为2DFFT和信号的相位有着天然的联系,当然这种认知背后是有严谨的数学推理和论证过程的,这里就不进行公式的推导了,给大家上几幅图直观的感受一下,2DFFT和信号相位的关系。如下图所示的信号,在矩阵中心n*n窗口内值为1,其三维图和俯视图如下所示。
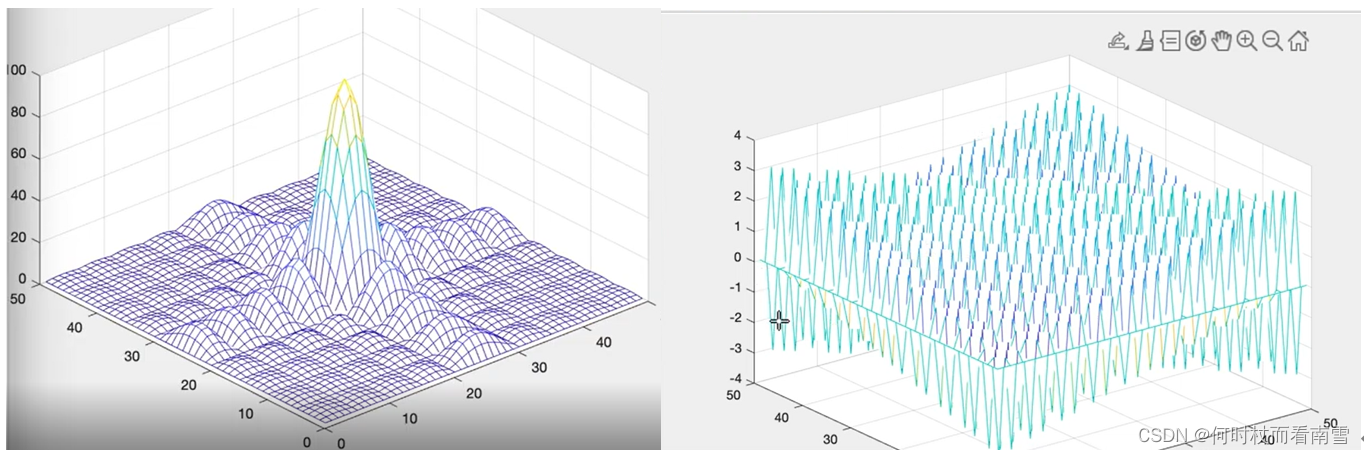
下图为上述图像分别做2DFFT的幅频图像和相频图像
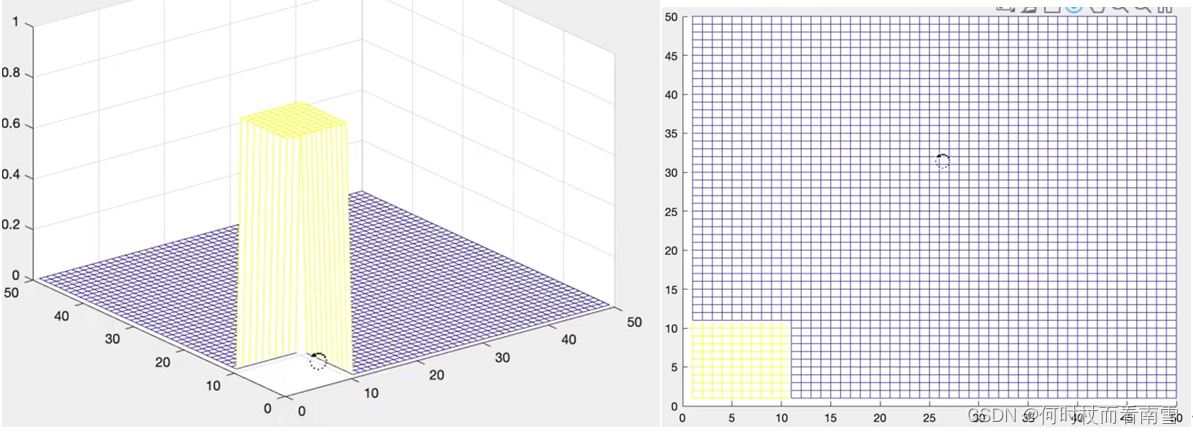
请大家记住上面的幅频图像和相频图像,然后我们原始图像什么都不做,仅仅改变原始图像的相位,幅度为1的矩阵由中心移动到边缘,改变后的图像时域如下图所示
我们来看上述图像的2DFTT的结果,观察其幅频曲线和相频曲线,然后奇妙的事情发生了,2DFFT的幅度函数和原来保持一样,相位却发生了改变!!!