上一章:
(STM32)从零开始的RT-Thread之旅--SPI驱动ST7735(1)
上一章我们先用SPI读取到了LCD的ID,这一章则是使用PWM调光点亮屏幕,因为测试这块屏幕时,发现直接设置背光引脚为高好像无法点亮,好像必须使用PWM调光,不过反正后面调节亮度还是需要PWM,索性先打通PWM。但这其中官方留的坑还是挺多的,简单的一个PWM因为需要契合内核驱动框架调了半天。
一如之前配置SPI的时候先配置RT-Thread Settings:

如果图形界面没有PWM,随便右键一个图标,点击配置项。
然后还是到board.h中定义相关的宏定义:
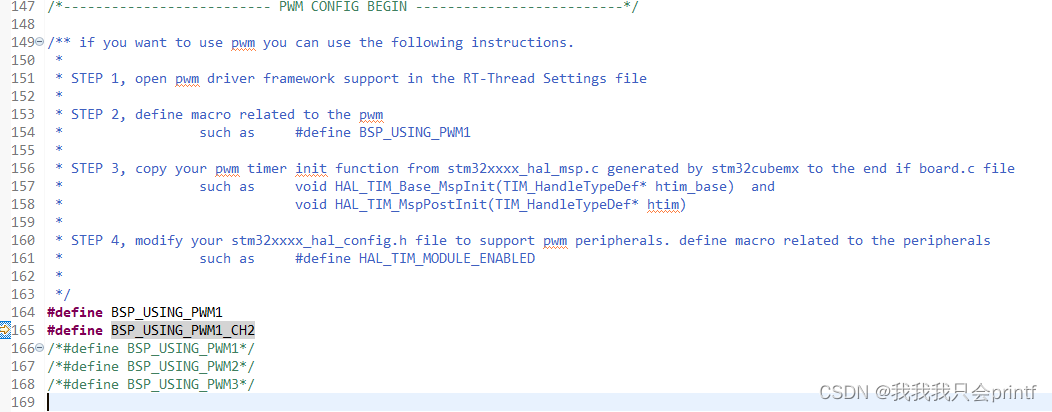
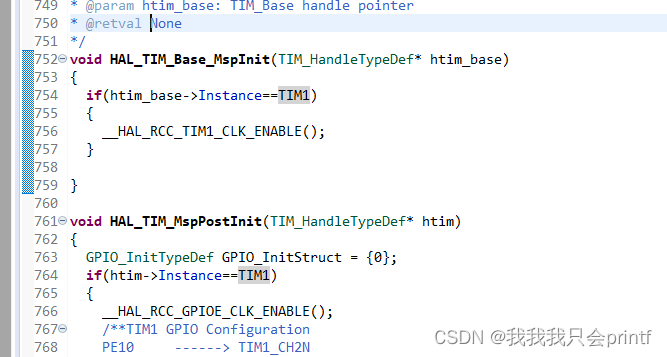
看一下介绍,结合上一章所讲,大致调用流程也很清晰。如果你在CubeMX中配置了相关PWM,就会生成这两个函数:
此时编译后会发现存在问题:
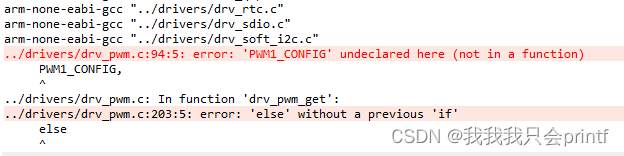
打开pwm_config.h中可以看到PWM_CONFIG是从PWM2开始配置的:
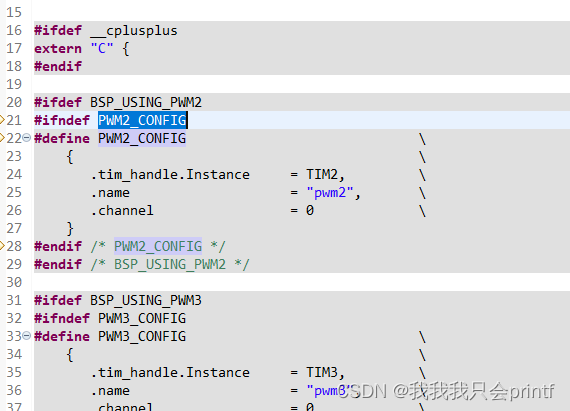
如果使用的PWM1则需要仿照现有的添加一个PWM1的:
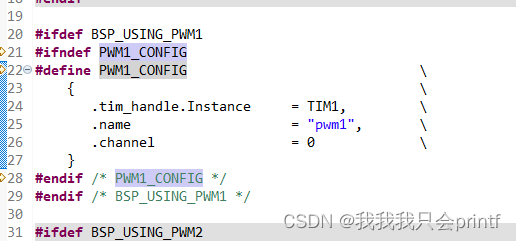
这里 tim_handle.Instance 也就是我们的PWM1对应的定时器是TIM1,名字是"pwm1",这个名字和我们之前用SPI4注册"spi40"设备时用的总线名字一样,我们到时候会通过一个函数搜索到它,如官方给的例子:

再次编译发现还回有问题,问题出在drv_pwm_set和drv_pwm_get这两个函数中,这是因为内核没有把H7系列的芯片包含进去:
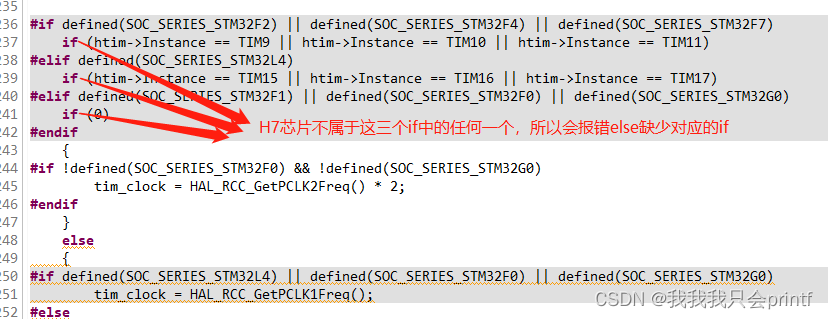
可以看到这里的内核驱动代码还不完善,其实这里主要是为了获取 tim_clock 这个变量,也就是定时器时钟,但是对于H7来说,确定用的哪个定时器很重要。详细可以参考:
H7定时器
这个应该是硬汉出的教程,别人转载的。这里我讲一下我是用的TIM1是怎么配置的,你可以根据需要配置你自己的定时器。这里讲解一下怎么由时钟树理解时钟走向。
首先我们进到 HAL_RCC_GetPCLK2Freq 这个函数中,如果你定时器挂载在APB1上,则应该使用的是 HAL_RCC_GetPCLK1Freq 这个函数获取PCLK1的频率。为什么需要用这个函数?我们从时钟树上理一下,这部分时钟树如下:

TIM1挂载在APB2下,时钟源是 rcc_timy_ker_ck ,我们需要先确定 rcc_pclk2的频率,也就是APB2总线的频率,它又来自于 rcc_hclk ,也就是AHB1/2的时钟,所以我们进入函数HAL_RCC_GetPCLK2Freq 可以看到:

首先我们通过HAL_RCC_GetHCLKFreq()这个函数获取到HCLK的时钟频率,然后拆分后面的部分,(RCC->D2CFGR & RCC_D2CFGR_D2PPRE2)>> RCC_D2CFGR_D2PPRE2_Pos 是为了获取 RCC_D2CFGR_D2PPRE2 寄存器的值,原理如下:
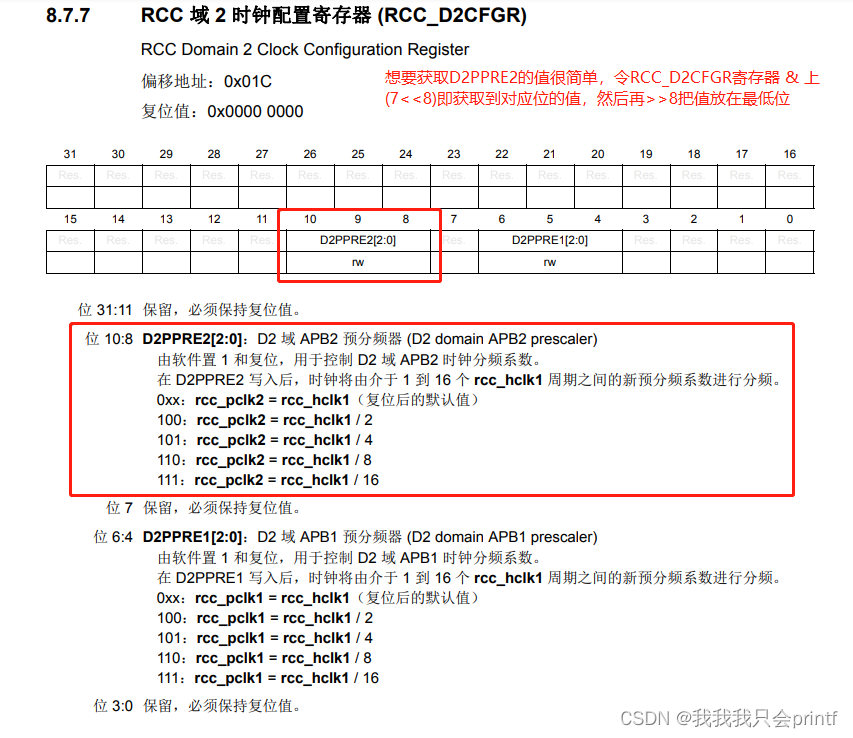 获取到 RCC_D2CFGR_D2PPRE2 寄存器的值后,查表:
获取到 RCC_D2CFGR_D2PPRE2 寄存器的值后,查表:

比如这个寄存器的值是 110,即6,D1CorePrescTable[6] = 3,HCLK的时钟右移3,相当于除以8,正好和上图中计算110:rcc_pclk2的情况相同。然后根据这个时钟去计算定时器时钟,这又分为两个情况:
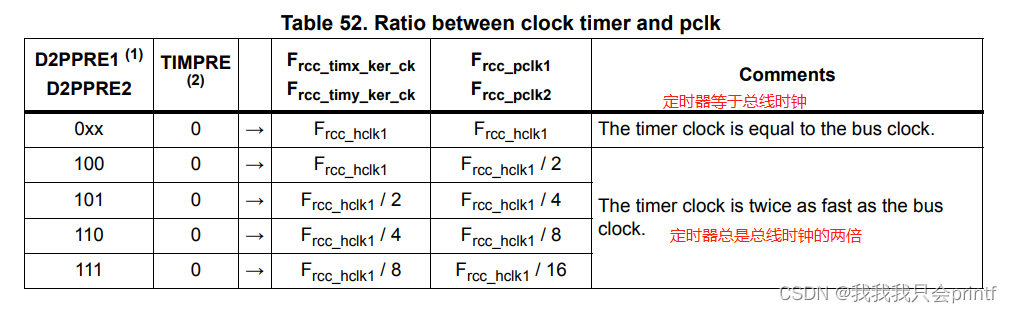
源码中我们可以看到在使用 HAL_RCC_GetPCLK2Freq 获取定时器时钟的情况中只有乘2这一种情况:
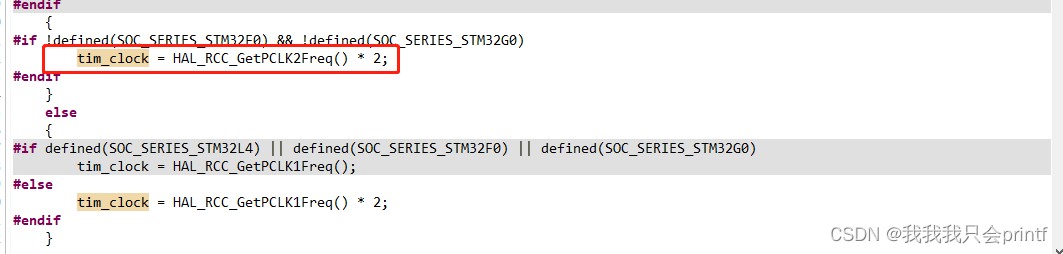
但其实应该是两种情况,我这里在CubeMX中 D2PPRE2 寄存器选择的是除以2,所以这里乘2是没有关系的:
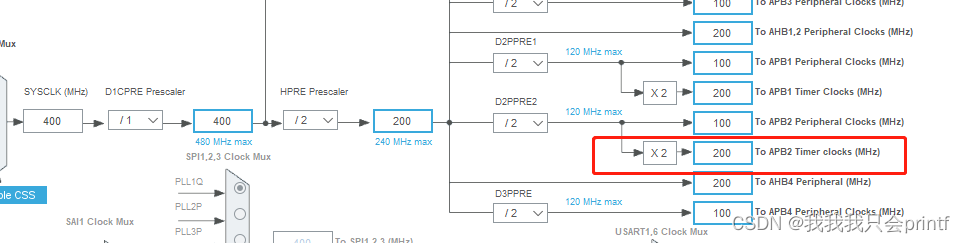
如果在CubeMX中D2PPRE2选择1,你会发现定时器那里会自动选为除以1,但是选1的话可以看到会有如下提示:

APB2最大只能120MHz,选1则系统主频最高只能240MHz了。
修改完这里,编译即可正常通过。然后我们就可以开始调用官方给的接口函数控制PWM了:
#include <rtthread.h>
#include <rtdevice.h>
#include "mpwm.h"
#include <stm32h7xx.h>
struct rt_device_pwm *pwm_lcd;
static uint32_t mpulse = 0;
void mpwm_set(uint32_t pulse)
{
mpulse = pulse;
rt_pwm_set(pwm_lcd,2,1000,pulse);
}
uint32_t mpwm_get(void)
{
return mpulse;
}
void mpwm_init(void)
{
pwm_lcd = (struct rt_device_pwm *)rt_device_find("pwm1");
if(!pwm_lcd)
{
rt_kprintf("pwm1 can't find\n");
}
rt_pwm_enable(pwm_lcd,2);
rt_pwm_set(pwm_lcd,2,1000,0);
}这里简单写了几个接口函数,实际直接使用,发现并没有输出,主要的坑已经全踩过了!懒得给官方提PR了,留给后人完善吧。
STM32的PWM所使用定时的初始化在内核驱动 drv_pwm.c 文件中的 stm32_pwm_init的 stm32_hw_pwm_init 函数里:
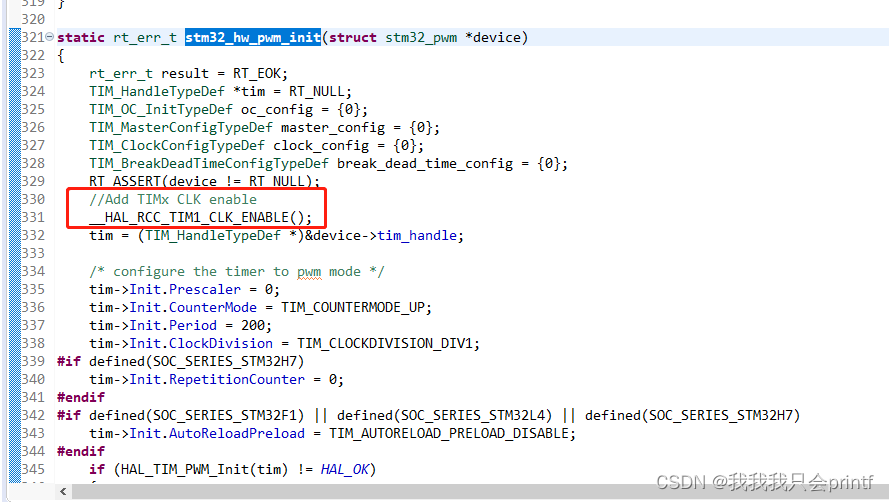
注意上图红色方框,你使用哪个定时器就需要添加哪个定时器的时钟使能。其次高级定时器一些额外的设置也需要添加,你如果不知道你用的定时器需不需要添加这些,请参照你使用CubeMX生成的定时器配置,我这里是在main.c中:
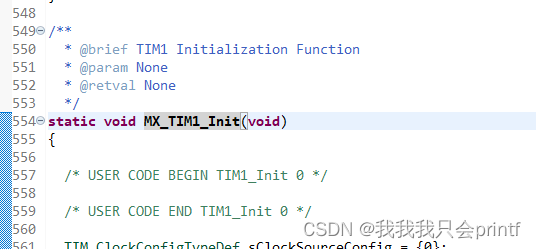
根据上面函数的配置,添加到这个函数里:
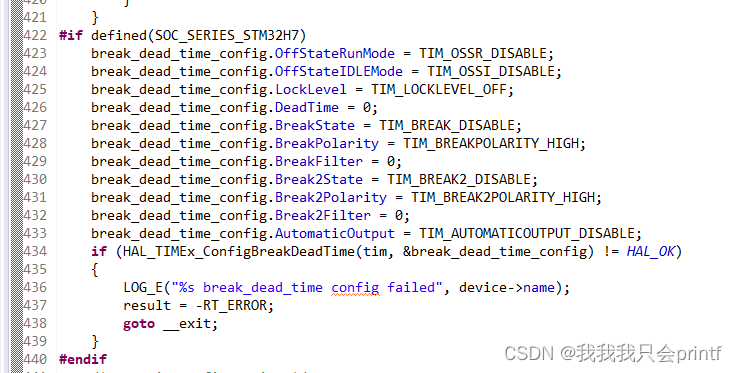
我这里使用的TIM1需要配置刹车和死区配置。添加完这些,你会发现还是无法使用PWM输出,这是因为是使能函数有问题:
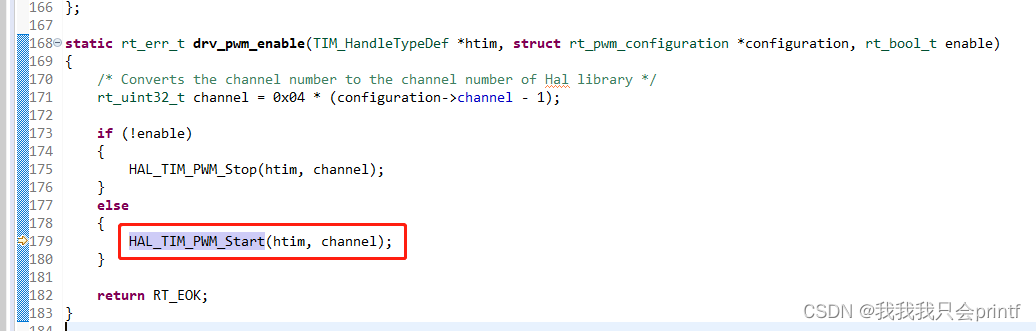
在同个文件中还有pwm使能函数,这个函数中所使用的 HAL_TIM_PWM_Start 函数只对普通定时器有效,TIM1是高级定时器,所以应该使用的函数是:HAL_TIMEx_PWMN_Start 。我这里不考虑其他情况,只针对我自己的工程做以下修改:
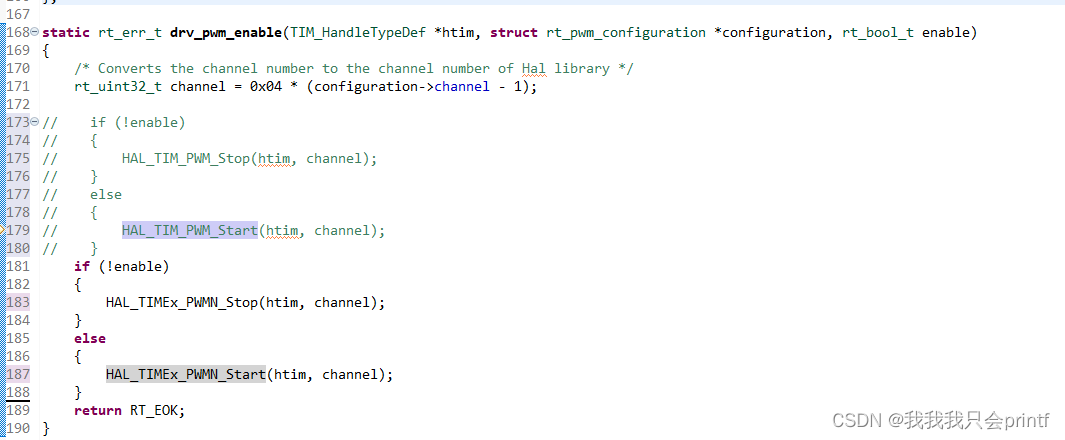
此时再使用PWM即可正常使用。
给出drv_pwm.c以供参考:
/*
* Copyright (c) 2006-2018, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2018-12-13 zylx first version
*/
#include <board.h>
#include<rtthread.h>
#include<rtdevice.h>
#ifdef RT_USING_PWM
#include "drv_config.h"
#define DRV_DEBUG
#define LOG_TAG "drv.pwm"
#include <drv_log.h>
#define MAX_PERIOD 65535
#define MIN_PERIOD 3
#define MIN_PULSE 2
extern void HAL_TIM_MspPostInit(TIM_HandleTypeDef *htim);
enum
{
#ifdef BSP_USING_PWM1
PWM1_INDEX,
#endif
#ifdef BSP_USING_PWM2
PWM2_INDEX,
#endif
#ifdef BSP_USING_PWM3
PWM3_INDEX,
#endif
#ifdef BSP_USING_PWM4
PWM4_INDEX,
#endif
#ifdef BSP_USING_PWM5
PWM5_INDEX,
#endif
#ifdef BSP_USING_PWM6
PWM6_INDEX,
#endif
#ifdef BSP_USING_PWM7
PWM7_INDEX,
#endif
#ifdef BSP_USING_PWM8
PWM8_INDEX,
#endif
#ifdef BSP_USING_PWM9
PWM9_INDEX,
#endif
#ifdef BSP_USING_PWM10
PWM10_INDEX,
#endif
#ifdef BSP_USING_PWM11
PWM11_INDEX,
#endif
#ifdef BSP_USING_PWM12
PWM12_INDEX,
#endif
#ifdef BSP_USING_PWM13
PWM13_INDEX,
#endif
#ifdef BSP_USING_PWM14
PWM14_INDEX,
#endif
#ifdef BSP_USING_PWM15
PWM15_INDEX,
#endif
#ifdef BSP_USING_PWM16
PWM16_INDEX,
#endif
#ifdef BSP_USING_PWM17
PWM17_INDEX,
#endif
};
struct stm32_pwm
{
struct rt_device_pwm pwm_device;
TIM_HandleTypeDef tim_handle;
rt_uint8_t channel;
char *name;
};
static struct stm32_pwm stm32_pwm_obj[] =
{
#ifdef BSP_USING_PWM1
PWM1_CONFIG,
#endif
#ifdef BSP_USING_PWM2
PWM2_CONFIG,
#endif
#ifdef BSP_USING_PWM3
PWM3_CONFIG,
#endif
#ifdef BSP_USING_PWM4
PWM4_CONFIG,
#endif
#ifdef BSP_USING_PWM5
PWM5_CONFIG,
#endif
#ifdef BSP_USING_PWM6
PWM6_CONFIG,
#endif
#ifdef BSP_USING_PWM7
PWM7_CONFIG,
#endif
#ifdef BSP_USING_PWM8
PWM8_CONFIG,
#endif
#ifdef BSP_USING_PWM9
PWM9_CONFIG,
#endif
#ifdef BSP_USING_PWM10
PWM10_CONFIG,
#endif
#ifdef BSP_USING_PWM11
PWM11_CONFIG,
#endif
#ifdef BSP_USING_PWM12
PWM12_CONFIG,
#endif
#ifdef BSP_USING_PWM13
PWM13_CONFIG,
#endif
#ifdef BSP_USING_PWM14
PWM14_CONFIG,
#endif
#ifdef BSP_USING_PWM15
PWM15_CONFIG,
#endif
#ifdef BSP_USING_PWM16
PWM16_CONFIG,
#endif
#ifdef BSP_USING_PWM17
PWM17_CONFIG,
#endif
};
static rt_err_t drv_pwm_control(struct rt_device_pwm *device, int cmd, void *arg);
static struct rt_pwm_ops drv_ops =
{
drv_pwm_control
};
static rt_err_t drv_pwm_enable(TIM_HandleTypeDef *htim, struct rt_pwm_configuration *configuration, rt_bool_t enable)
{
/* Converts the channel number to the channel number of Hal library */
rt_uint32_t channel = 0x04 * (configuration->channel - 1);
// if (!enable)
// {
// HAL_TIM_PWM_Stop(htim, channel);
// }
// else
// {
// HAL_TIM_PWM_Start(htim, channel);
// }
if (!enable)
{
HAL_TIMEx_PWMN_Stop(htim, channel);
}
else
{
HAL_TIMEx_PWMN_Start(htim, channel);
}
return RT_EOK;
}
static rt_err_t drv_pwm_get(TIM_HandleTypeDef *htim, struct rt_pwm_configuration *configuration)
{
/* Converts the channel number to the channel number of Hal library */
rt_uint32_t channel = 0x04 * (configuration->channel - 1);
rt_uint64_t tim_clock;
#if defined(SOC_SERIES_STM32F2) || defined(SOC_SERIES_STM32F4) || defined(SOC_SERIES_STM32F7)
if (htim->Instance == TIM9 || htim->Instance == TIM10 || htim->Instance == TIM11)
#elif defined(SOC_SERIES_STM32L4)
if (htim->Instance == TIM15 || htim->Instance == TIM16 || htim->Instance == TIM17)
#elif defined(SOC_SERIES_STM32F1) || defined(SOC_SERIES_STM32F0) || defined(SOC_SERIES_STM32G0) || defined(SOC_SERIES_STM32H7)
if (0)
#elif defined(SOC_SERIES_STM32H7)
if (1)
#endif
{
#if !defined(SOC_SERIES_STM32F0) && !defined(SOC_SERIES_STM32G0)
tim_clock = HAL_RCC_GetPCLK2Freq() * 2;
#endif
}
else
{
#if defined(SOC_SERIES_STM32L4) || defined(SOC_SERIES_STM32F0) || defined(SOC_SERIES_STM32G0)
tim_clock = HAL_RCC_GetPCLK1Freq();
#else
tim_clock = HAL_RCC_GetPCLK1Freq() * 2;
#endif
}
if (__HAL_TIM_GET_CLOCKDIVISION(htim) == TIM_CLOCKDIVISION_DIV2)
{
tim_clock = tim_clock / 2;
}
else if (__HAL_TIM_GET_CLOCKDIVISION(htim) == TIM_CLOCKDIVISION_DIV4)
{
tim_clock = tim_clock / 4;
}
/* Convert nanosecond to frequency and duty cycle. 1s = 1 * 1000 * 1000 * 1000 ns */
tim_clock /= 1000000UL;
configuration->period = (__HAL_TIM_GET_AUTORELOAD(htim) + 1) * (htim->Instance->PSC + 1) * 1000UL / tim_clock;
configuration->pulse = (__HAL_TIM_GET_COMPARE(htim, channel) + 1) * (htim->Instance->PSC + 1) * 1000UL / tim_clock;
return RT_EOK;
}
static rt_err_t drv_pwm_set(TIM_HandleTypeDef *htim, struct rt_pwm_configuration *configuration)
{
rt_uint32_t period, pulse;
rt_uint64_t tim_clock, psc;
/* Converts the channel number to the channel number of Hal library */
rt_uint32_t channel = 0x04 * (configuration->channel - 1);
#if defined(SOC_SERIES_STM32F2) || defined(SOC_SERIES_STM32F4) || defined(SOC_SERIES_STM32F7)
if (htim->Instance == TIM9 || htim->Instance == TIM10 || htim->Instance == TIM11)
#elif defined(SOC_SERIES_STM32L4)
if (htim->Instance == TIM15 || htim->Instance == TIM16 || htim->Instance == TIM17)
#elif defined(SOC_SERIES_STM32F1) || defined(SOC_SERIES_STM32F0) || defined(SOC_SERIES_STM32G0)
if (0)
#elif defined(SOC_SERIES_STM32H7)
if (1)
#endif
{
#if !defined(SOC_SERIES_STM32F0) && !defined(SOC_SERIES_STM32G0)
tim_clock = HAL_RCC_GetPCLK2Freq() * 2;
#endif
}
else
{
#if defined(SOC_SERIES_STM32L4) || defined(SOC_SERIES_STM32F0) || defined(SOC_SERIES_STM32G0)
tim_clock = HAL_RCC_GetPCLK1Freq();
#else
tim_clock = HAL_RCC_GetPCLK1Freq() * 2;
#endif
}
/* Convert nanosecond to frequency and duty cycle. 1s = 1 * 1000 * 1000 * 1000 ns */
tim_clock /= 1000000UL;
period = (unsigned long long)configuration->period * tim_clock / 1000ULL ;
psc = period / MAX_PERIOD + 1;
period = period / psc;
__HAL_TIM_SET_PRESCALER(htim, psc - 1);
if (period < MIN_PERIOD)
{
period = MIN_PERIOD;
}
__HAL_TIM_SET_AUTORELOAD(htim, period - 1);
pulse = (unsigned long long)configuration->pulse * tim_clock / psc / 1000ULL;
if (pulse < MIN_PULSE)
{
pulse = MIN_PULSE;
}
else if (pulse > period)
{
pulse = period;
}
__HAL_TIM_SET_COMPARE(htim, channel, pulse - 1);
__HAL_TIM_SET_COUNTER(htim, 0);
/* Update frequency value */
HAL_TIM_GenerateEvent(htim, TIM_EVENTSOURCE_UPDATE);
return RT_EOK;
}
static rt_err_t drv_pwm_control(struct rt_device_pwm *device, int cmd, void *arg)
{
struct rt_pwm_configuration *configuration = (struct rt_pwm_configuration *)arg;
TIM_HandleTypeDef *htim = (TIM_HandleTypeDef *)device->parent.user_data;
switch (cmd)
{
case PWM_CMD_ENABLE:
return drv_pwm_enable(htim, configuration, RT_TRUE);
case PWM_CMD_DISABLE:
return drv_pwm_enable(htim, configuration, RT_FALSE);
case PWM_CMD_SET:
return drv_pwm_set(htim, configuration);
case PWM_CMD_GET:
return drv_pwm_get(htim, configuration);
default:
return RT_EINVAL;
}
}
static rt_err_t stm32_hw_pwm_init(struct stm32_pwm *device)
{
rt_err_t result = RT_EOK;
TIM_HandleTypeDef *tim = RT_NULL;
TIM_OC_InitTypeDef oc_config = {0};
TIM_MasterConfigTypeDef master_config = {0};
TIM_ClockConfigTypeDef clock_config = {0};
TIM_BreakDeadTimeConfigTypeDef break_dead_time_config = {0};
RT_ASSERT(device != RT_NULL);
//Add TIMx CLK enable
__HAL_RCC_TIM1_CLK_ENABLE();
tim = (TIM_HandleTypeDef *)&device->tim_handle;
/* configure the timer to pwm mode */
tim->Init.Prescaler = 0;
tim->Init.CounterMode = TIM_COUNTERMODE_UP;
tim->Init.Period = 200;
tim->Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
#if defined(SOC_SERIES_STM32H7)
tim->Init.RepetitionCounter = 0;
#endif
#if defined(SOC_SERIES_STM32F1) || defined(SOC_SERIES_STM32L4) || defined(SOC_SERIES_STM32H7)
tim->Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
#endif
if (HAL_TIM_PWM_Init(tim) != HAL_OK)
{
LOG_E("%s pwm init failed", device->name);
result = -RT_ERROR;
goto __exit;
}
clock_config.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(tim, &clock_config) != HAL_OK)
{
LOG_E("%s clock init failed", device->name);
result = -RT_ERROR;
goto __exit;
}
master_config.MasterOutputTrigger = TIM_TRGO_RESET;
#if defined(SOC_SERIES_STM32H7)
master_config.MasterOutputTrigger2 = TIM_TRGO_RESET;
#endif
master_config.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(tim, &master_config) != HAL_OK)
{
LOG_E("%s master config failed", device->name);
result = -RT_ERROR;
goto __exit;
}
oc_config.OCMode = TIM_OCMODE_PWM1;
oc_config.Pulse = 0;
oc_config.OCPolarity = TIM_OCPOLARITY_HIGH;
#if defined(SOC_SERIES_STM32H7)
oc_config.OCNPolarity = TIM_OCNPOLARITY_LOW;
#endif
oc_config.OCFastMode = TIM_OCFAST_DISABLE;
oc_config.OCNIdleState = TIM_OCNIDLESTATE_RESET;
oc_config.OCIdleState = TIM_OCIDLESTATE_RESET;
/* config pwm channel */
if (device->channel & 0x01)
{
if (HAL_TIM_PWM_ConfigChannel(tim, &oc_config, TIM_CHANNEL_1) != HAL_OK)
{
LOG_E("%s channel1 config failed", device->name);
result = -RT_ERROR;
goto __exit;
}
}
if (device->channel & 0x02)
{
if (HAL_TIM_PWM_ConfigChannel(tim, &oc_config, TIM_CHANNEL_2) != HAL_OK)
{
LOG_E("%s channel2 config failed", device->name);
result = -RT_ERROR;
goto __exit;
}
}
if (device->channel & 0x04)
{
if (HAL_TIM_PWM_ConfigChannel(tim, &oc_config, TIM_CHANNEL_3) != HAL_OK)
{
LOG_E("%s channel3 config failed", device->name);
result = -RT_ERROR;
goto __exit;
}
}
if (device->channel & 0x08)
{
if (HAL_TIM_PWM_ConfigChannel(tim, &oc_config, TIM_CHANNEL_4) != HAL_OK)
{
LOG_E("%s channel4 config failed", device->name);
result = -RT_ERROR;
goto __exit;
}
}
#if defined(SOC_SERIES_STM32H7)
break_dead_time_config.OffStateRunMode = TIM_OSSR_DISABLE;
break_dead_time_config.OffStateIDLEMode = TIM_OSSI_DISABLE;
break_dead_time_config.LockLevel = TIM_LOCKLEVEL_OFF;
break_dead_time_config.DeadTime = 0;
break_dead_time_config.BreakState = TIM_BREAK_DISABLE;
break_dead_time_config.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
break_dead_time_config.BreakFilter = 0;
break_dead_time_config.Break2State = TIM_BREAK2_DISABLE;
break_dead_time_config.Break2Polarity = TIM_BREAK2POLARITY_HIGH;
break_dead_time_config.Break2Filter = 0;
break_dead_time_config.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(tim, &break_dead_time_config) != HAL_OK)
{
LOG_E("%s break_dead_time config failed", device->name);
result = -RT_ERROR;
goto __exit;
}
#endif
/* pwm pin configuration */
HAL_TIM_MspPostInit(tim);
/* enable update request source */
__HAL_TIM_URS_ENABLE(tim);
__exit:
return result;
}
static void pwm_get_channel(void)
{
#ifdef BSP_USING_PWM1_CH1
stm32_pwm_obj[PWM1_INDEX].channel |= 1 << 0;
#endif
#ifdef BSP_USING_PWM1_CH2
stm32_pwm_obj[PWM1_INDEX].channel |= 1 << 1;
#endif
#ifdef BSP_USING_PWM1_CH3
stm32_pwm_obj[PWM1_INDEX].channel |= 1 << 2;
#endif
#ifdef BSP_USING_PWM1_CH4
stm32_pwm_obj[PWM1_INDEX].channel |= 1 << 3;
#endif
#ifdef BSP_USING_PWM2_CH1
stm32_pwm_obj[PWM2_INDEX].channel |= 1 << 0;
#endif
#ifdef BSP_USING_PWM2_CH2
stm32_pwm_obj[PWM2_INDEX].channel |= 1 << 1;
#endif
#ifdef BSP_USING_PWM2_CH3
stm32_pwm_obj[PWM2_INDEX].channel |= 1 << 2;
#endif
#ifdef BSP_USING_PWM2_CH4
stm32_pwm_obj[PWM2_INDEX].channel |= 1 << 3;
#endif
#ifdef BSP_USING_PWM3_CH1
stm32_pwm_obj[PWM3_INDEX].channel |= 1 << 0;
#endif
#ifdef BSP_USING_PWM3_CH2
stm32_pwm_obj[PWM3_INDEX].channel |= 1 << 1;
#endif
#ifdef BSP_USING_PWM3_CH3
stm32_pwm_obj[PWM3_INDEX].channel |= 1 << 2;
#endif
#ifdef BSP_USING_PWM3_CH4
stm32_pwm_obj[PWM3_INDEX].channel |= 1 << 3;
#endif
#ifdef BSP_USING_PWM4_CH1
stm32_pwm_obj[PWM4_INDEX].channel |= 1 << 0;
#endif
#ifdef BSP_USING_PWM4_CH2
stm32_pwm_obj[PWM4_INDEX].channel |= 1 << 1;
#endif
#ifdef BSP_USING_PWM4_CH3
stm32_pwm_obj[PWM4_INDEX].channel |= 1 << 2;
#endif
#ifdef BSP_USING_PWM4_CH4
stm32_pwm_obj[PWM4_INDEX].channel |= 1 << 3;
#endif
#ifdef BSP_USING_PWM5_CH1
stm32_pwm_obj[PWM5_INDEX].channel |= 1 << 0;
#endif
#ifdef BSP_USING_PWM5_CH2
stm32_pwm_obj[PWM5_INDEX].channel |= 1 << 1;
#endif
#ifdef BSP_USING_PWM5_CH3
stm32_pwm_obj[PWM5_INDEX].channel |= 1 << 2;
#endif
#ifdef BSP_USING_PWM5_CH4
stm32_pwm_obj[PWM5_INDEX].channel |= 1 << 3;
#endif
#ifdef BSP_USING_PWM6_CH1
stm32_pwm_obj[PWM6_INDEX].channel |= 1 << 0;
#endif
#ifdef BSP_USING_PWM6_CH2
stm32_pwm_obj[PWM6_INDEX].channel |= 1 << 1;
#endif
#ifdef BSP_USING_PWM6_CH3
stm32_pwm_obj[PWM6_INDEX].channel |= 1 << 2;
#endif
#ifdef BSP_USING_PWM6_CH4
stm32_pwm_obj[PWM6_INDEX].channel |= 1 << 3;
#endif
#ifdef BSP_USING_PWM7_CH1
stm32_pwm_obj[PWM7_INDEX].channel |= 1 << 0;
#endif
#ifdef BSP_USING_PWM7_CH2
stm32_pwm_obj[PWM7_INDEX].channel |= 1 << 1;
#endif
#ifdef BSP_USING_PWM7_CH3
stm32_pwm_obj[PWM7_INDEX].channel |= 1 << 2;
#endif
#ifdef BSP_USING_PWM7_CH4
stm32_pwm_obj[PWM7_INDEX].channel |= 1 << 3;
#endif
#ifdef BSP_USING_PWM8_CH1
stm32_pwm_obj[PWM8_INDEX].channel |= 1 << 0;
#endif
#ifdef BSP_USING_PWM8_CH2
stm32_pwm_obj[PWM8_INDEX].channel |= 1 << 1;
#endif
#ifdef BSP_USING_PWM8_CH3
stm32_pwm_obj[PWM8_INDEX].channel |= 1 << 2;
#endif
#ifdef BSP_USING_PWM8_CH4
stm32_pwm_obj[PWM8_INDEX].channel |= 1 << 3;
#endif
#ifdef BSP_USING_PWM9_CH1
stm32_pwm_obj[PWM9_INDEX].channel |= 1 << 0;
#endif
#ifdef BSP_USING_PWM9_CH2
stm32_pwm_obj[PWM9_INDEX].channel |= 1 << 1;
#endif
#ifdef BSP_USING_PWM9_CH3
stm32_pwm_obj[PWM9_INDEX].channel |= 1 << 2;
#endif
#ifdef BSP_USING_PWM9_CH4
stm32_pwm_obj[PWM9_INDEX].channel |= 1 << 3;
#endif
#ifdef BSP_USING_PWM12_CH1
stm32_pwm_obj[PWM12_INDEX].channel |= 1 << 0;
#endif
#ifdef BSP_USING_PWM12_CH2
stm32_pwm_obj[PWM12_INDEX].channel |= 1 << 1;
#endif
}
static int stm32_pwm_init(void)
{
int i = 0;
int result = RT_EOK;
pwm_get_channel();
for (i = 0; i < sizeof(stm32_pwm_obj) / sizeof(stm32_pwm_obj[0]); i++)
{
/* pwm init */
if (stm32_hw_pwm_init(&stm32_pwm_obj[i]) != RT_EOK)
{
LOG_E("%s init failed", stm32_pwm_obj[i].name);
result = -RT_ERROR;
goto __exit;
}
else
{
LOG_D("%s init success", stm32_pwm_obj[i].name);
/* register pwm device */
if (rt_device_pwm_register(&stm32_pwm_obj[i].pwm_device, stm32_pwm_obj[i].name, &drv_ops, &stm32_pwm_obj[i].tim_handle) == RT_EOK)
{
LOG_D("%s register success", stm32_pwm_obj[i].name);
}
else
{
LOG_E("%s register failed", stm32_pwm_obj[i].name);
result = -RT_ERROR;
}
}
}
__exit:
return result;
}
INIT_DEVICE_EXPORT(stm32_pwm_init);
#endif /* RT_USING_PWM */