lap.lapjv貌似是一个比匈牙利算法快的算法。
函数的参数:
如果是非方阵,extend_cost需要是True。
cost_limit,小于等于这个数值的分配代价才会分配。
def lapjv(*args, **kwargs): # real signature unknown
"""
Solve linear assignment problem using Jonker-Volgenant algorithm.
Parameters
----------
cost: (N,N) ndarray
Cost matrix. Entry `cost[i, j]` is the cost of assigning row `i` to
column `j`.
extend_cost: bool, optional
Whether or not extend a non-square matrix. Default: False.
cost_limit: double, optional
An upper limit for a cost of a single assignment. Default: `np.inf`.
return_cost: bool, optional
Whether or not to return the assignment cost.
Returns
-------
opt: double
Assignment cost. Not returned if `return_cost is False`.
x: (N,) ndarray
Assignment. `x[i]` specifies the column to which row `i` is assigned.
y: (N,) ndarray
Assignment. `y[j]` specifies the row to which column `j` is assigned.
Notes
-----
For non-square matrices (with `extend_cost is True`) or `cost_limit` set
low enough, there will be unmatched rows, columns in the solution `x`, `y`.
All such entries are set to -1.
"""
pass
一个例子:
import lap
import numpy as np
def linear_assignment(cost_matrix, thresh):
if cost_matrix.size == 0:
return np.empty((0, 2), dtype=int), tuple(range(cost_matrix.shape[0])), tuple(range(cost_matrix.shape[1]))
matches, unmatched_a, unmatched_b = [], [], []
cost, x, y = lap.lapjv(cost_matrix, extend_cost=True, cost_limit=thresh)
print(cost)
for ix, mx in enumerate(x):
if mx >= 0:
matches.append([ix, mx])
unmatched_a = np.where(x < 0)[0]
unmatched_b = np.where(y < 0)[0]
matches = np.asarray(matches)
return matches, unmatched_a, unmatched_b
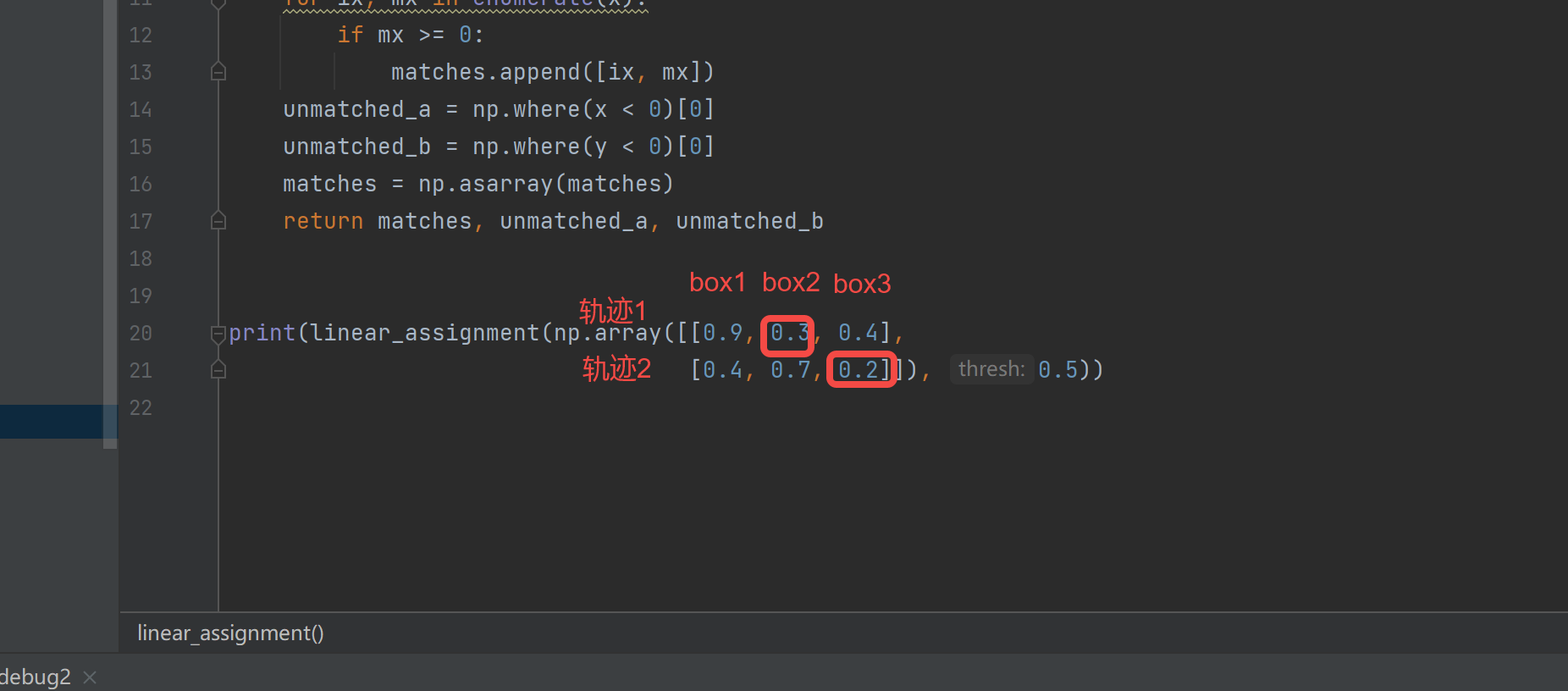
print(linear_assignment(np.array([[0.9, 0.3, 0.4],
[0.4, 0.7, 0.2]]), 0.5))
输出:(array([[0, 1],
[1, 2]]), array([], dtype=int64), array([0], dtype=int64))
如果:
print(linear_assignment(np.array([[0.9, 0.3, 0.4, 0.3],
[0.4, 0.7, 0.2, 0.3],
[0.3, 0.5, 0.6, 0.3],]), 0.5))
输出:
0.8
(array([[0, 1],
[1, 2],
[2, 0]]), array([], dtype=int64), array([3], dtype=int64))
在Bytetrack中,所有轨迹和所有框都计算匹配得分,然后1减去匹配得分就是这里的分配代价矩阵。