文章目录
- 前言
- 一、接线
- 二、刷固件
- 三、设置机架
- 四、校准遥控器
- 五、设置遥控开关
- 六、校准传感器
- 七、设置参数
前言
硬件:
pix2.4.8
250穿越机
云卓T10遥控
软件:
APM4.3.7
QGC
MP
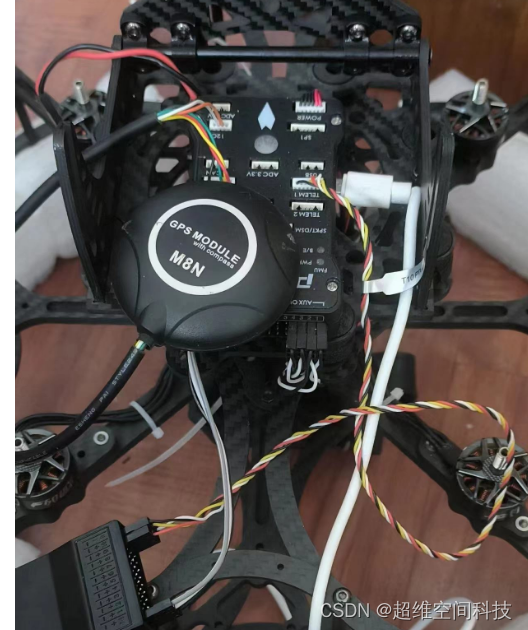
一、接线
GPS接gps和i2c口,接收机的p/s口接飞控RCIN
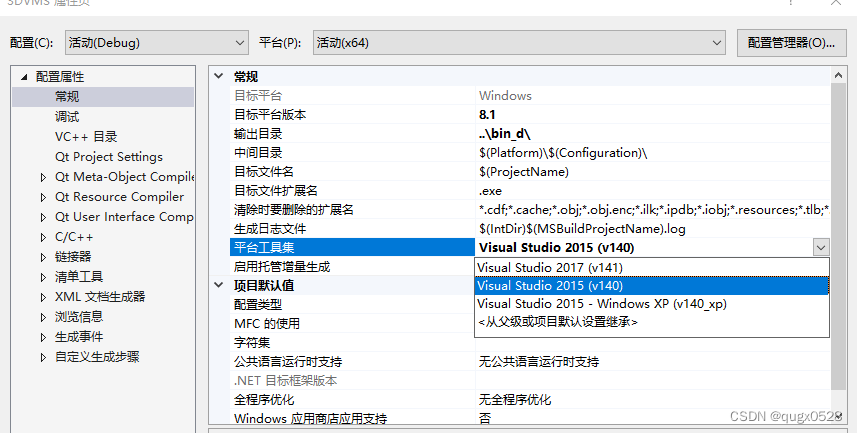
二、刷固件
刷固件我这里使用的是qgc(也可以用mp)。
切到下面页面,然后插上飞控(飞机不要接电池)
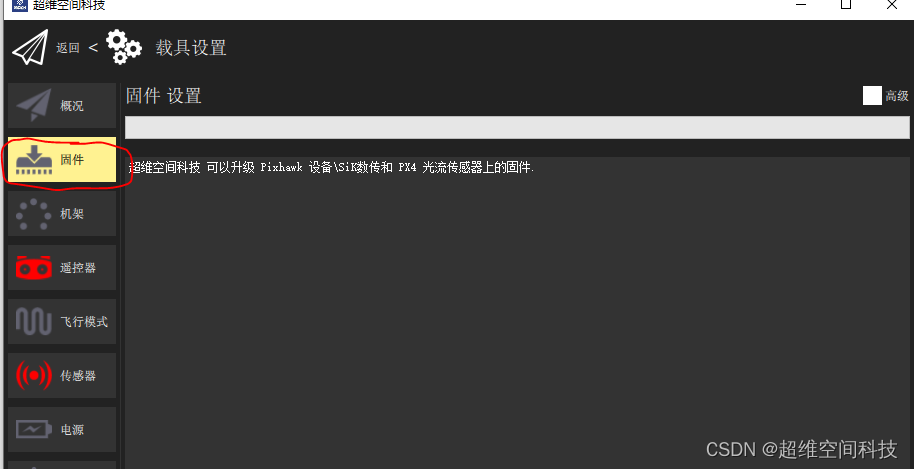
插上后设置如下,然后点确定下载固件
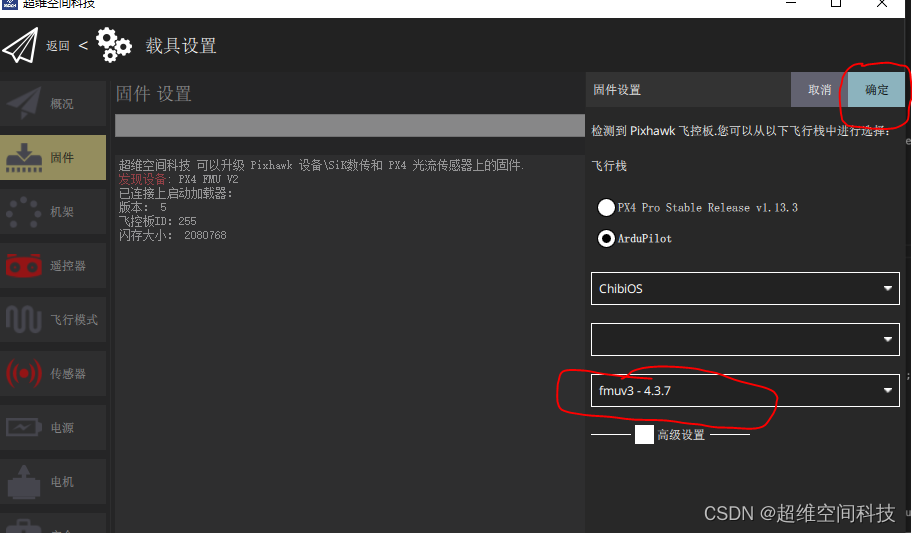
下载完后如下:

三、设置机架
设置如下:

四、校准遥控器
点击下图的校准,然后按提示拨动摇杆即可,校准时不要接电池

五、设置遥控开关
在下图设置遥控的拨码开关,设置一个切模式开关,我这里设置成自稳定高定点。再设置一个解锁开关和刹车开关(刹车开关如果在空中使用,飞机将自由落体),设置完后需重启飞控才能生效

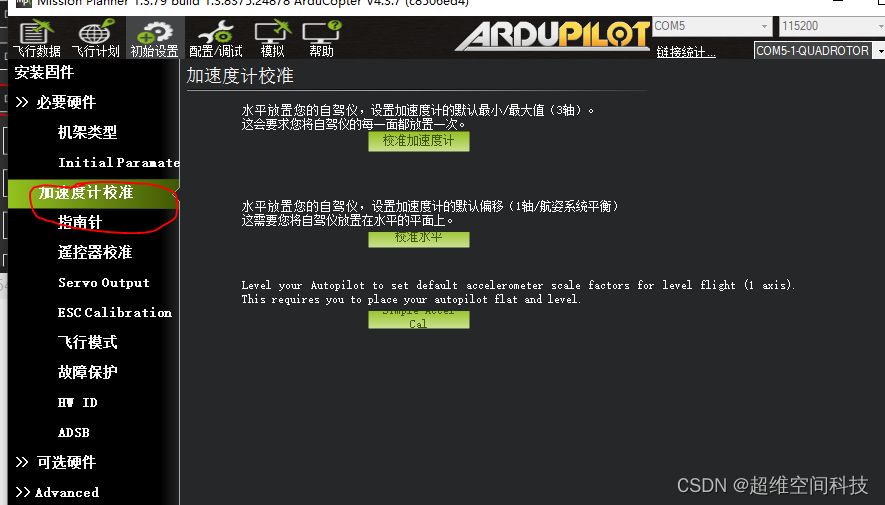
六、校准传感器
qgc校准apm固件的传感器会非常卡,这里使用mp
按提示校准加速度计和指南针即可。
七、设置参数
由于电调支持dshot,所以这里设置电机输出为dshot

同时点击输出通道也改一下,因为主通道无法输出dshot协议,因此改到辅助通道,同时电调的信号线也接到辅助通道

经过上面的配置,无人机就可以装上桨叶试飞了。务必检查电机和桨叶不要装反

![【进阶]Java:线程通信(了解)](https://img-blog.csdnimg.cn/85806098b96c417aa2ac4587a45d292f.png)