目录
一、何时使用自适应DPCA脉冲消除器
二、自适应DPCA脉冲消除器可抑制杂波和干扰
三、程序
一、何时使用自适应DPCA脉冲消除器
考虑需要抑制杂波的机载雷达系统 返回并可能干扰干扰。根据以下任何一项 条件下,可以选择自适应 DPCA (ADPCA) 脉冲消除器 用于抑制这些影响。
-
干扰和其他干扰影响很大。 DPCA脉冲消除器容易受到干扰,因为 DPCA脉冲消除器不使用接收到的数据。
-
样本矩阵反演 (SMI) 算法不适用 因为计算费用或快速变化的环境。
对象实现 ADPCA 脉冲消除器。该脉冲消除器使用接收到的数据 从两个连续脉冲估计时空干扰 协方差矩阵。具体而言,该对象允许您指定:phased.ADPCAPulseCanceller
-
训练单元的数量。该算法使用训练 单元格来估计干扰。一般来说,数量较多 训练细胞可以更好地估计干扰。
-
靠近目标牢房的保护牢房数。 该算法识别保护单元以防止目标返回 污染干扰的估计
二、自适应DPCA脉冲消除器可抑制杂波和干扰
本示例实现自适应 DPCA 脉冲消除器,用于杂波和干扰抑制。该场景与DPCA脉冲消除器中的场景相同,以抑制杂波,只是在该位置(3.5e3,1e3,0)添加了相当于固定宽带弹幕干扰器的噪声。干扰器的有效辐射功率为 1 kW。
为了方便起见,重复该场景,机载雷达平台是一个工作频率为 4 GHz 的六元件 ULA。阵列元件的间隔为 4 GHz 载波频率波长的一半。雷达发射十个持续时间为 2 μs 的矩形脉冲,PRF 为 5 kHz。平台沿阵列轴移动,速度等于元件间距与PRF乘积的一半。 ADPCA 脉冲消除适用于vT=d/2哪里
-
v表示平台的速度
-
T表示脉冲重复间隔
-
d指示数组的元素间距
目标具有 1 平方米的非波动 RCS,并以 (15,15,0) 的恒定速度矢量移动。
将十个矩形脉冲传播到目标并返回,并收集阵列上的响应。使用常量伽玛模型计算杂波回波,其灰度系数值对应于树木繁茂的地形。此外,将干扰信号从干扰器位置传播到机载ULA。
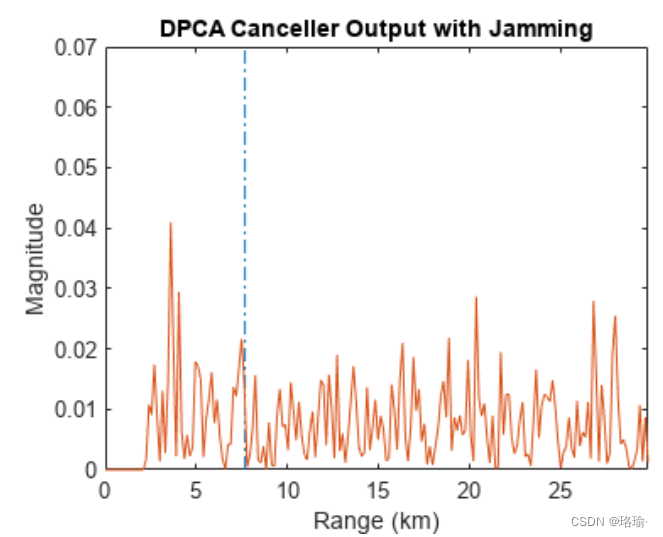
确定目标范围、距离门和双向多普勒频移。使用非自适应DPCA脉冲消除器处理阵列响应。为此,请构造 DPCA 对象,并将其应用于接收到的信号。绘制 DPCA 结果,目标范围用垂直虚线标记。请注意干扰信号的存在如何遮挡目标。
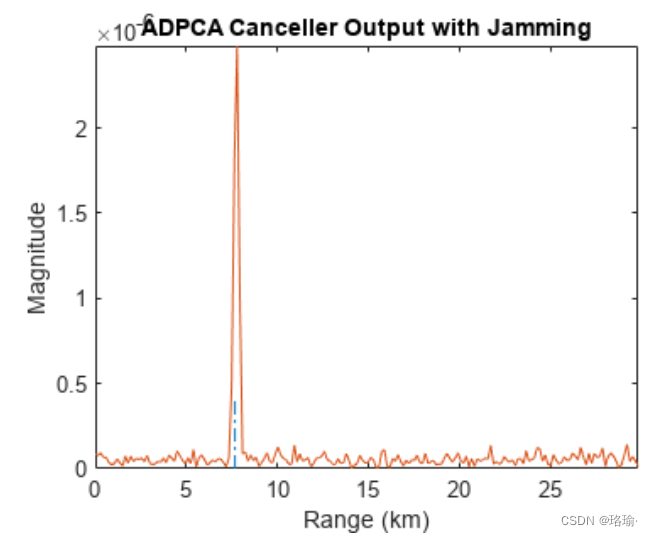
应用自适应 DPCA 脉冲消除器。使用 100 个训练单元和 4 个保护单元,目标范围门两侧各两个。使用垂直虚线标记的目标范围绘制结果。请注意自适应 DPCA 脉冲消除器如何使您能够在存在干扰信号的情况下检测目标。
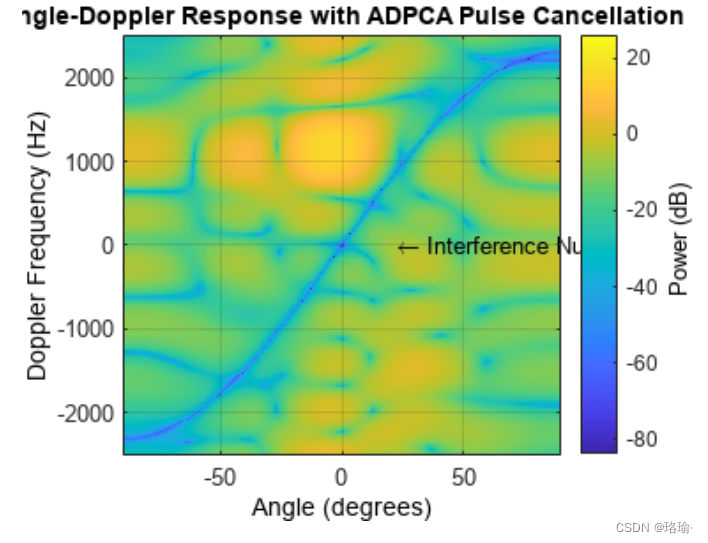
检查角度多普勒响应。请注意,对于所有多普勒频率,角度多普勒平面中存在杂波脊,干扰器宽侧角处存在零点。
三、程序
使用Matlab R2022b版本,点击打开。

打开下面的“AdaptiveDPCAPulseCancellerExample.mlx”文件,点击运行,就可以看到上述效果。
关注下面公众号,后台回复关键词:自适应位移相位中心天线脉冲消除器,发送源码链接。










![[附源码]计算机毕业设计JAVA博客系统设计](https://img-blog.csdnimg.cn/16cdf0d5625d4c12bb7b683b06e8a835.png)