
介绍:俗话说的好,电控决定机器人下限,机械决定机器人上限。作为一个在电控领域摸打滚爬了三年的选手,一直非常心动那些酷炫的机械模型,但是一直以来只能做甲方给别人提需求,做不到自己动手实现。所以我打算趁着空闲时间,也学习一下SW的使用,以后争取机器人自己造,自己调。
参考资料:SOLIDWORKS精品教程
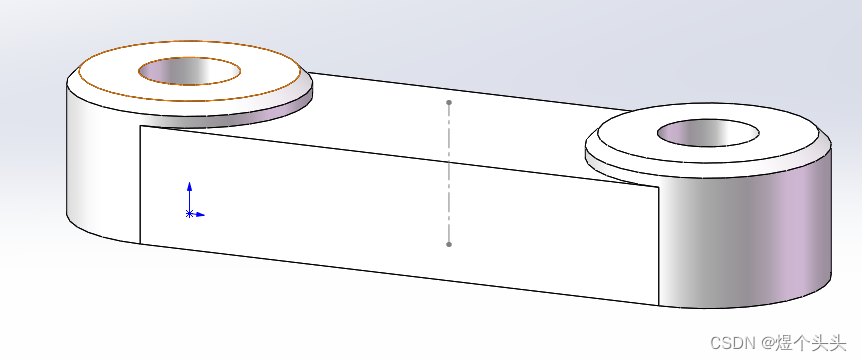
参数调节
通过查看装配体不同零件之间的关系,调整零件的草图尺寸,让整体更加结构更加合理。
比如曲柄高度,轴肩螺丝长度,外壳长度等等。
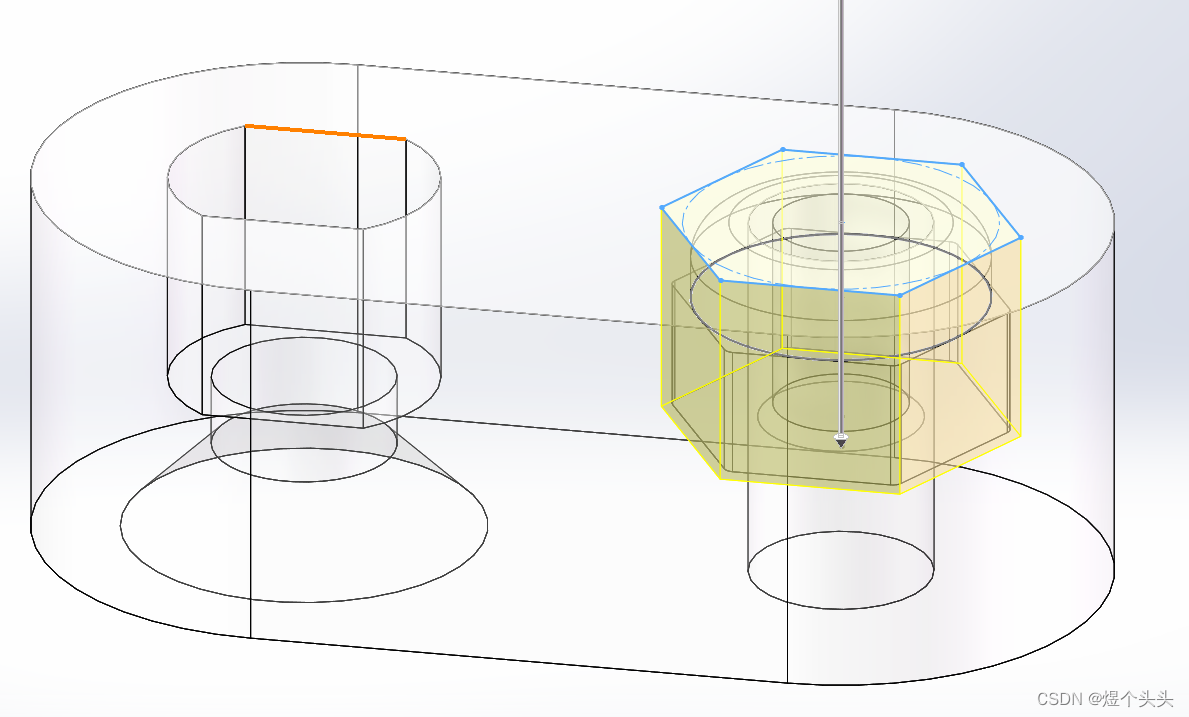
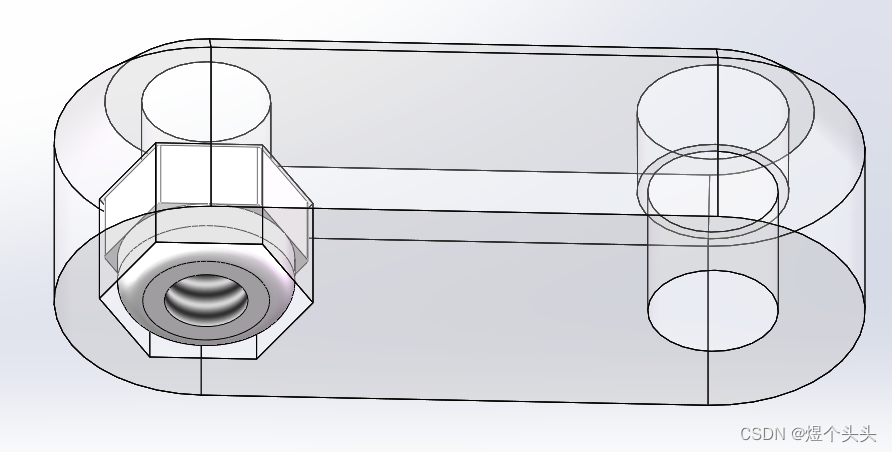
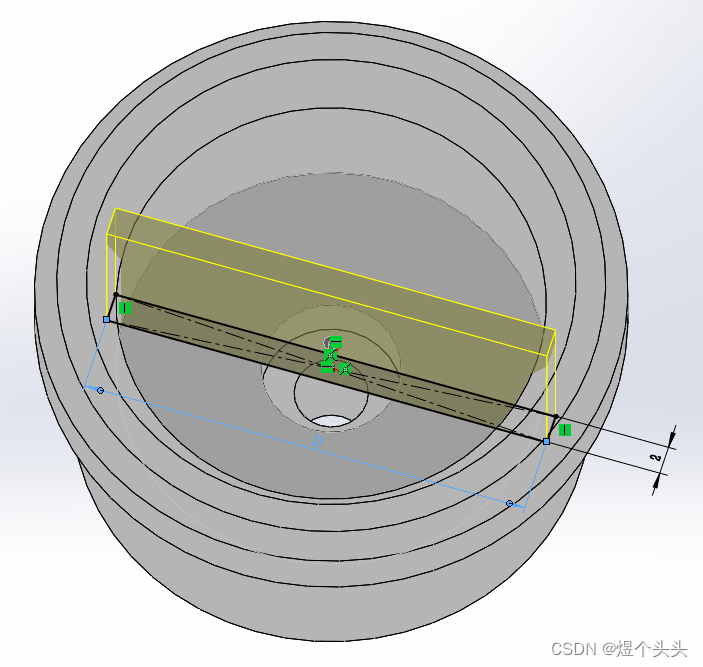
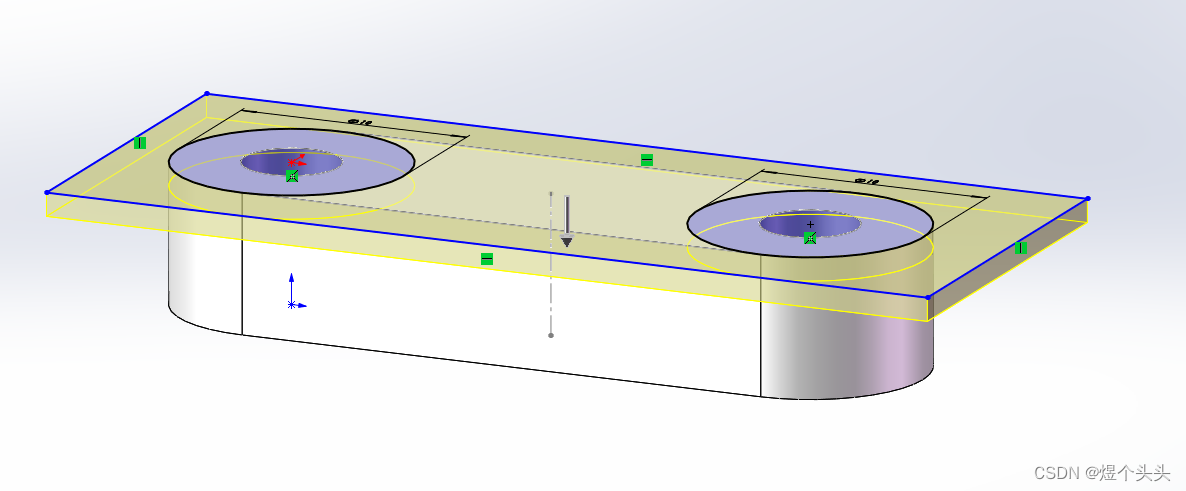
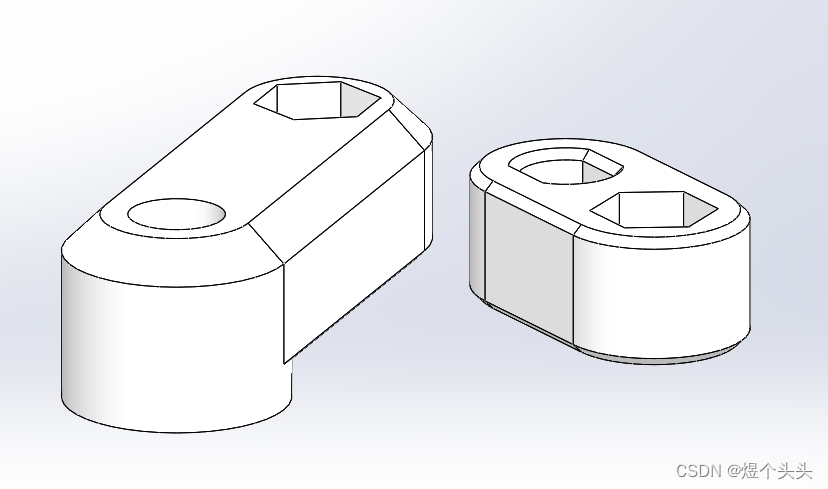
添加曲柄和摇杆的螺母孔
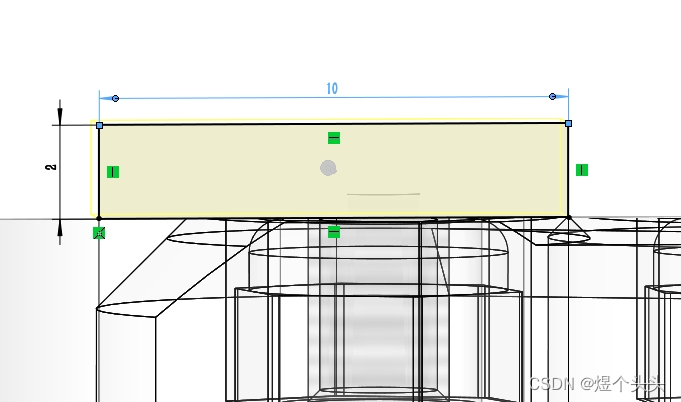
将曲柄和螺母孤立,并将曲柄设置为透明,对比绘制的孔比螺母略大,高度一致即可,可以采用草图绘制中的直线进行距离测量。
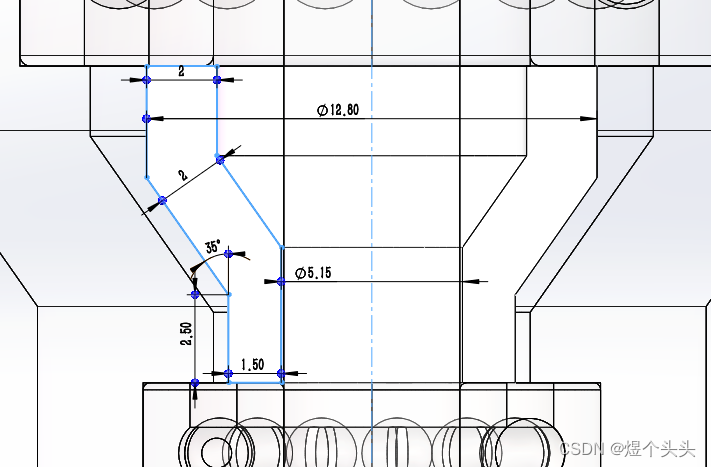
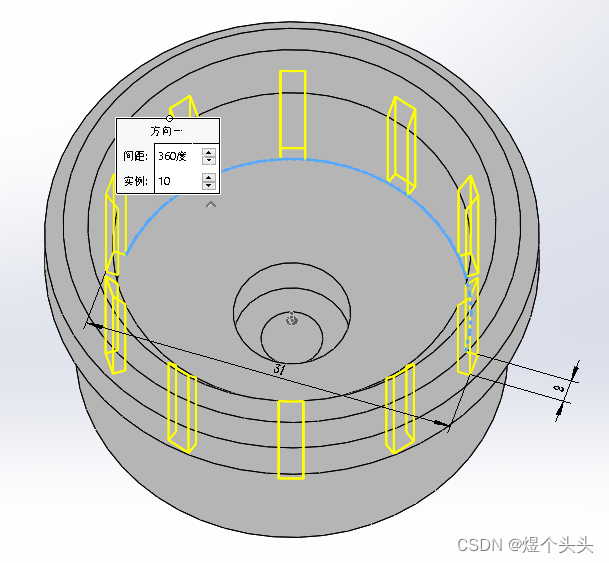
添加轴套
添加电机安装孔

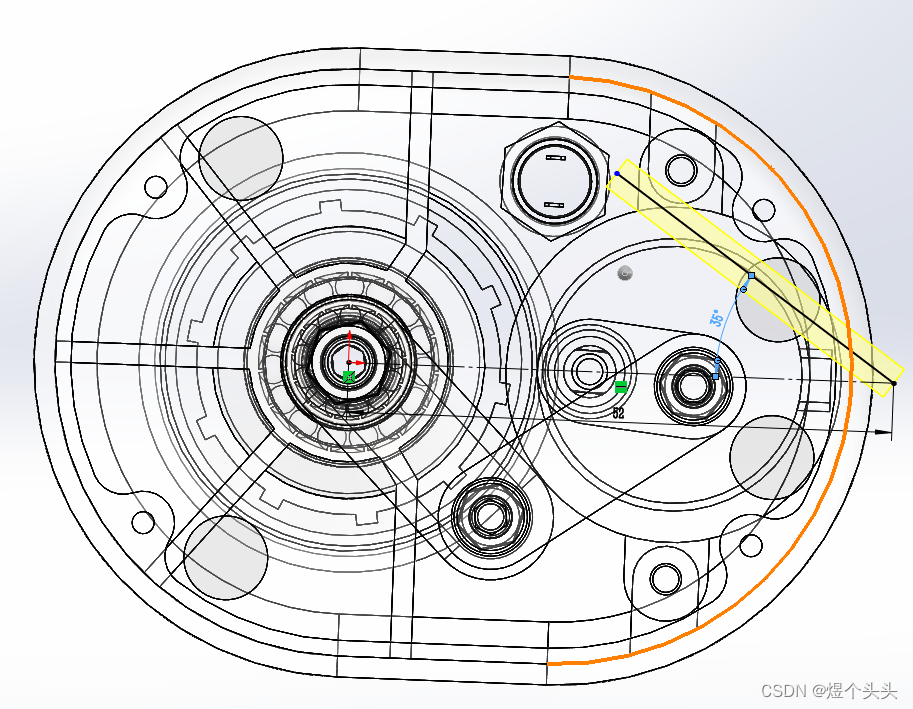
添加按钮和对应螺母
确定好按钮位置后再在外壳上打孔,先确定好孔的位置,再在装配体中调整配合关系,使其与按钮同心。
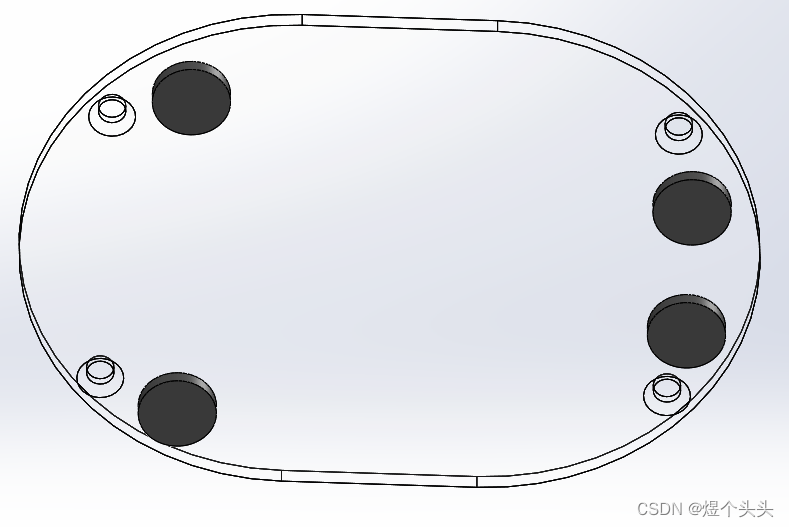
添加底板
先修改外壳,添加承载底板的结构
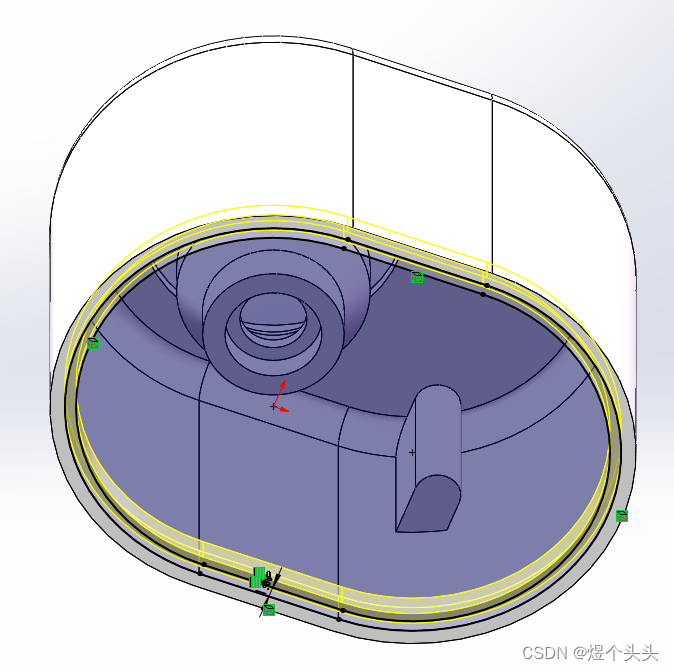
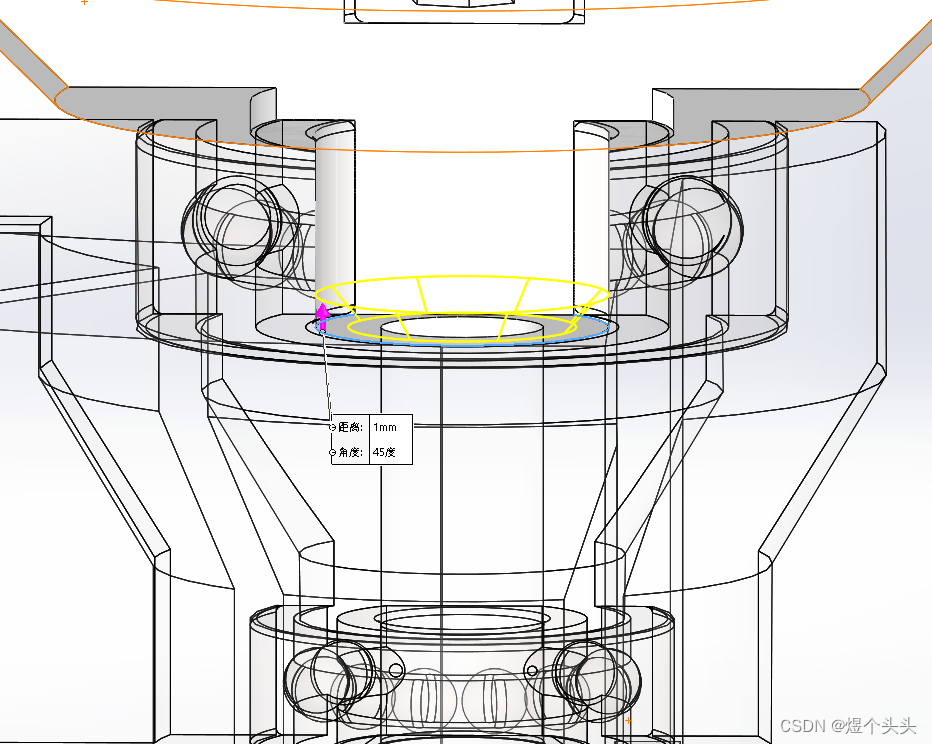
然后合理利用等距实体和转换实体引用,创建底板。

添加外壳与轴承的连接
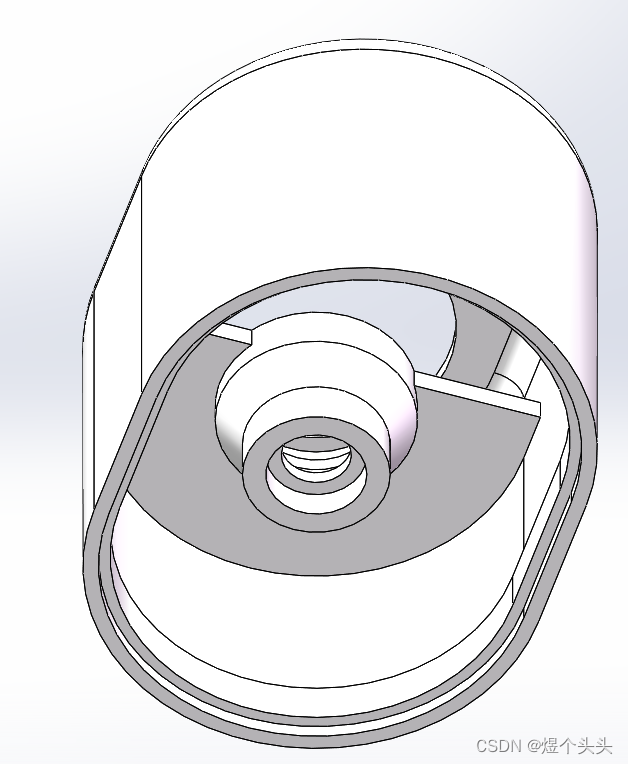
添加轴承座与外壳的筋
添加旋转底座细节
添加底座安装孔

添加底板EVA软垫
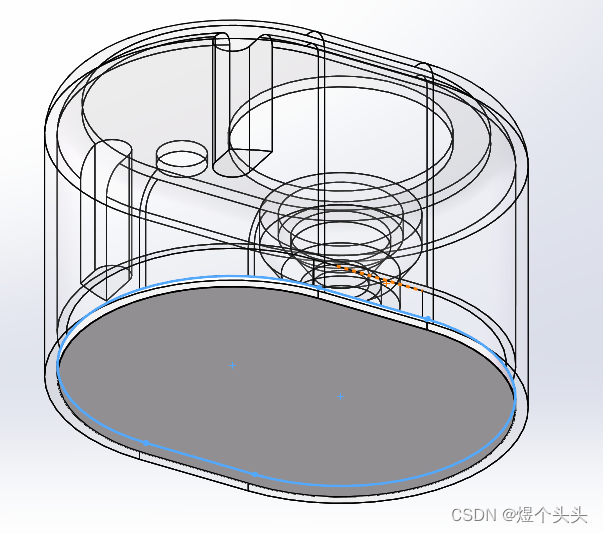
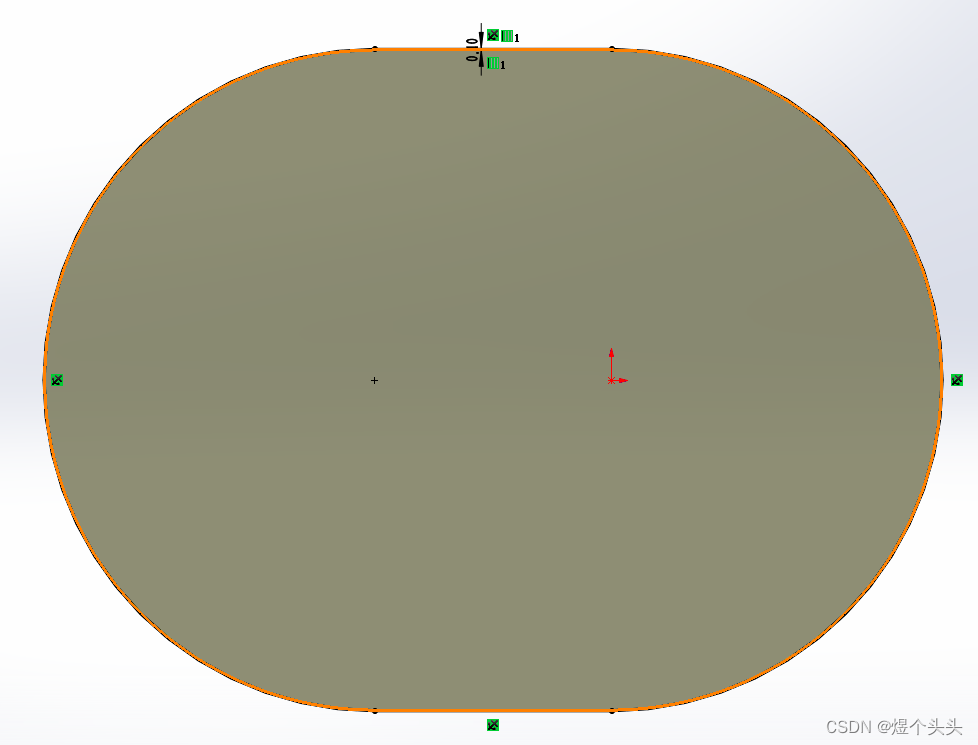
修改底板草图
因为底板的轮廓是外壳转换实体引用而来,但是外壳需要开孔引线,所以需要将底板的转换实体引用标签去掉,并且将草图轮廓线固定
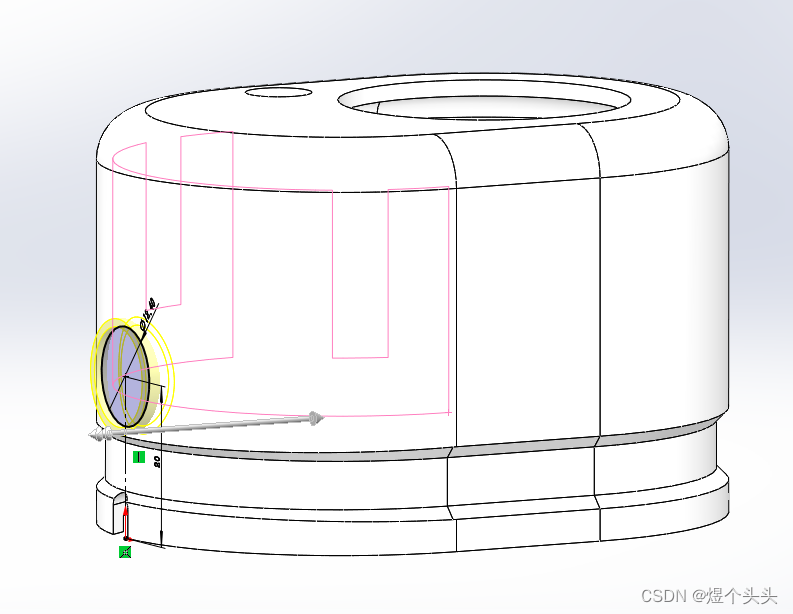
绘制外壳线槽
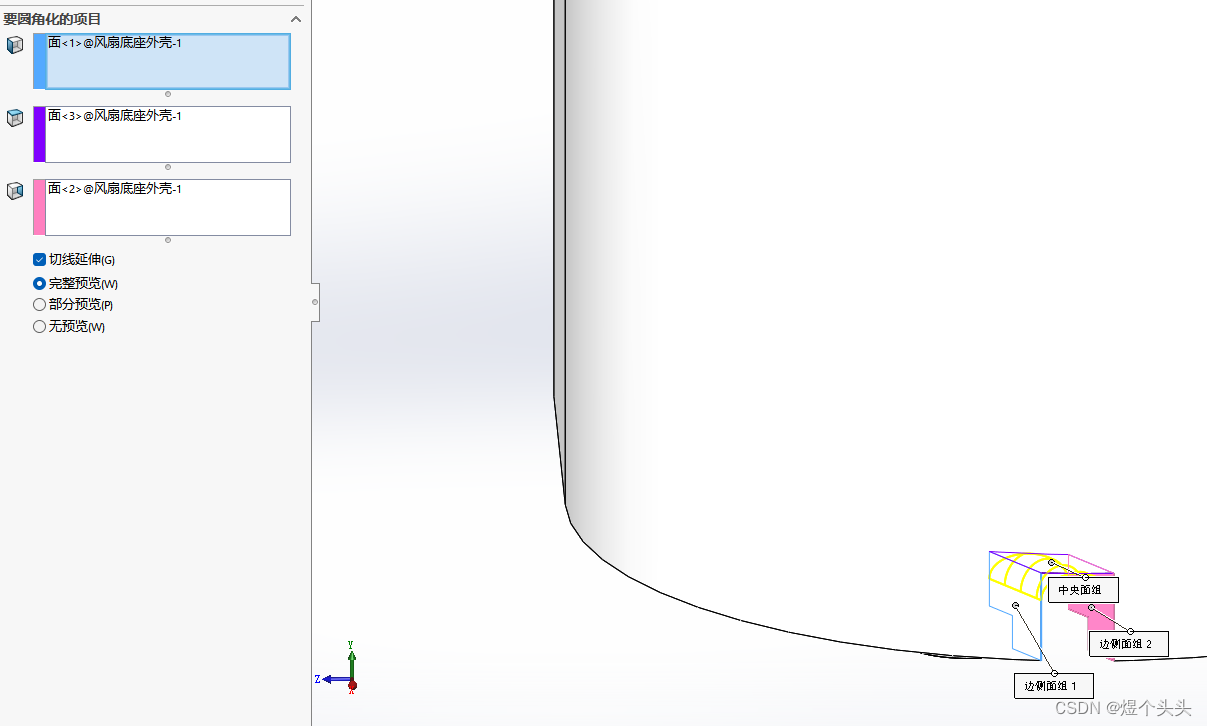
添加圆角
底板添加挡板,防止曲柄与线发生摩擦,并且挡板底板需增加倒角以增加强度。
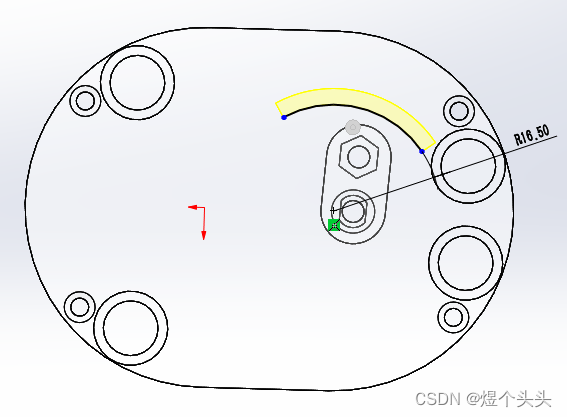
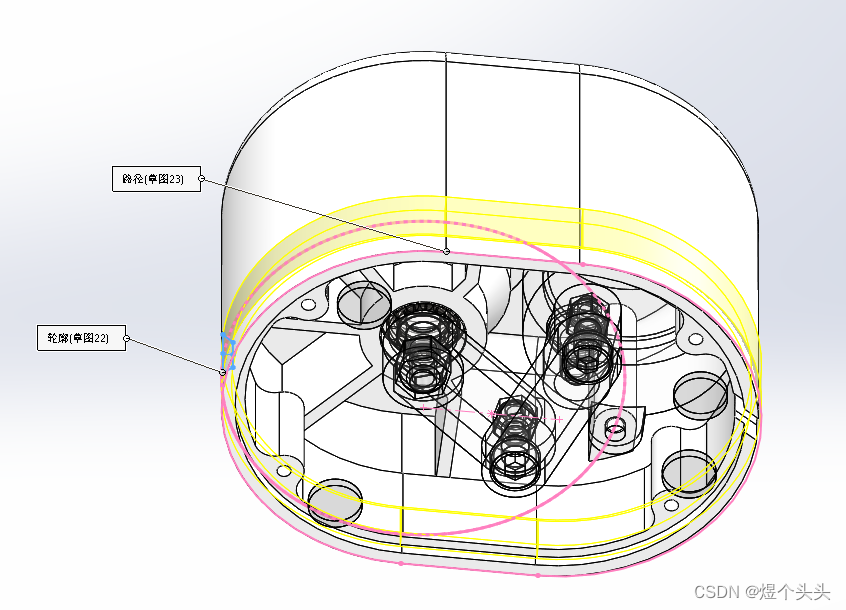
线收纳槽设计
首先将外壳内部的底板支撑结构的高度拉高至与轴承底座的筋接触,以增加外壳厚度,便于挖槽。
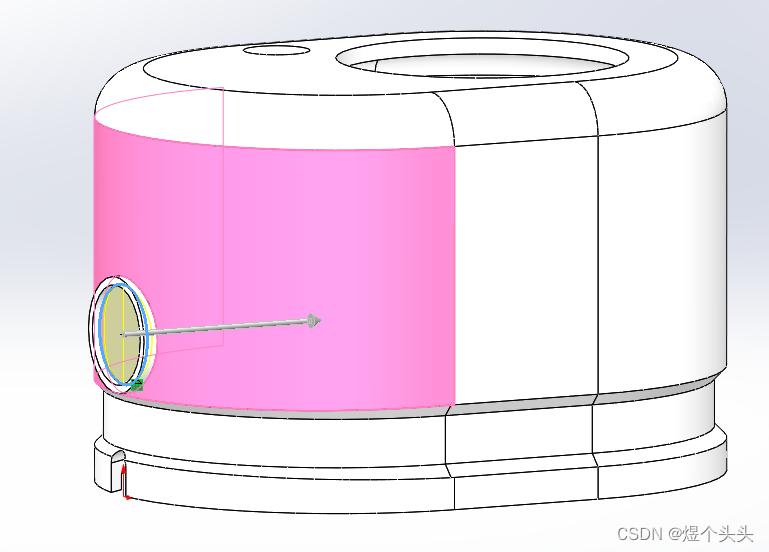
利用扫描切除,得到线槽
添加磁铁粘贴槽
需要将粘贴的面处理为竖直平面。
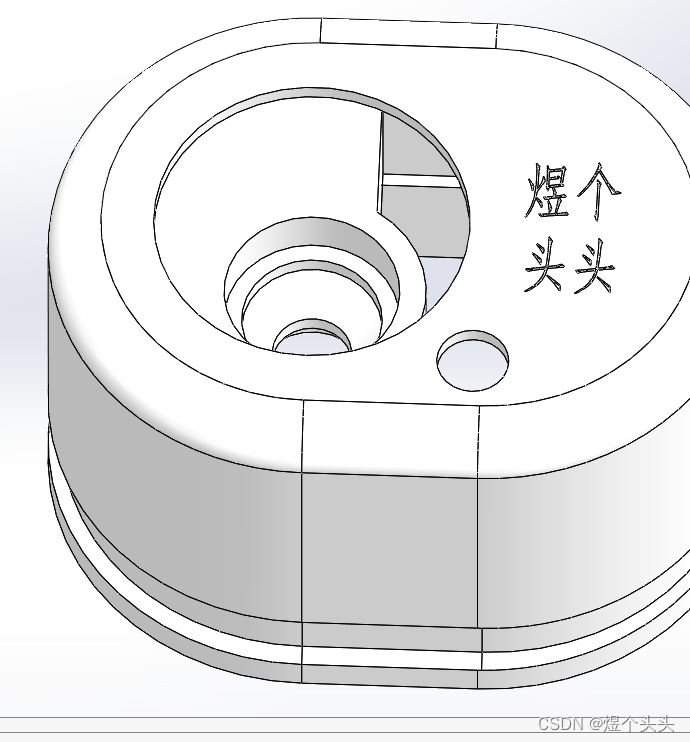
添加文字
问题排查
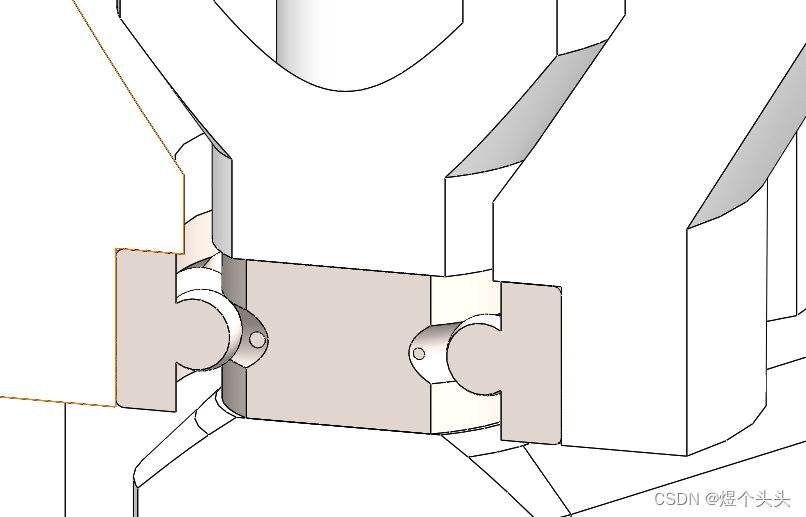
处理连杆与曲柄的干涉
曲柄和摇杆也同样需要添加倒角
摆动曲柄发现摇杆可能会与外壳干涉,所以需要缩减摇杆的长度
筋与摇杆的螺丝干涉了,所以需要切除筋的一部分
轴套与轴承座的距离过小,可以缩小轴套的尺寸
旋转底座的底面需插入轴承中,所以增加倒角更容易安装
收尾
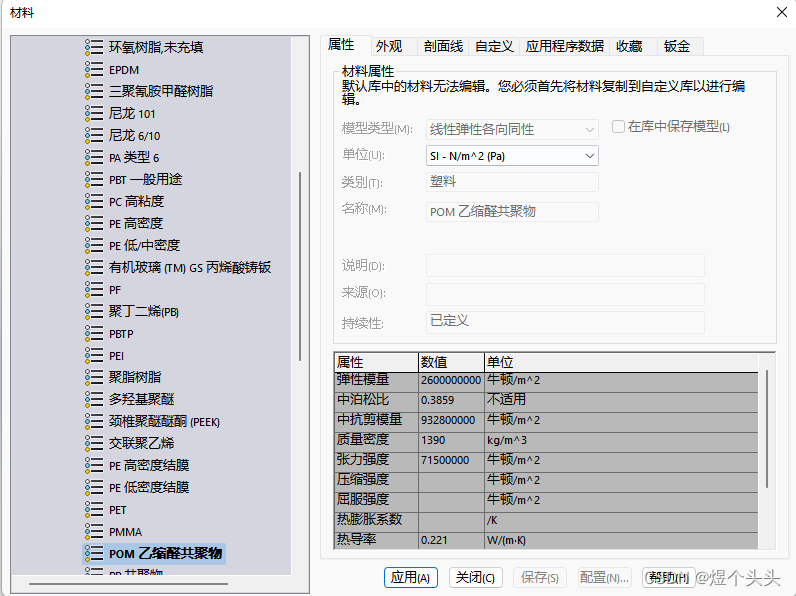
模型设计结束后,需要进行零件打印,可以新建一个装配体,然后将需要打印的零件都放进去,并配置好材质等参数,方便之后的打印
添加材料参数
保存为STEP格式文件

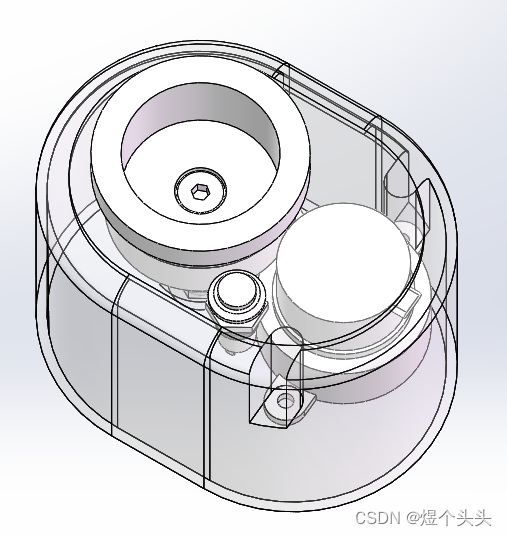
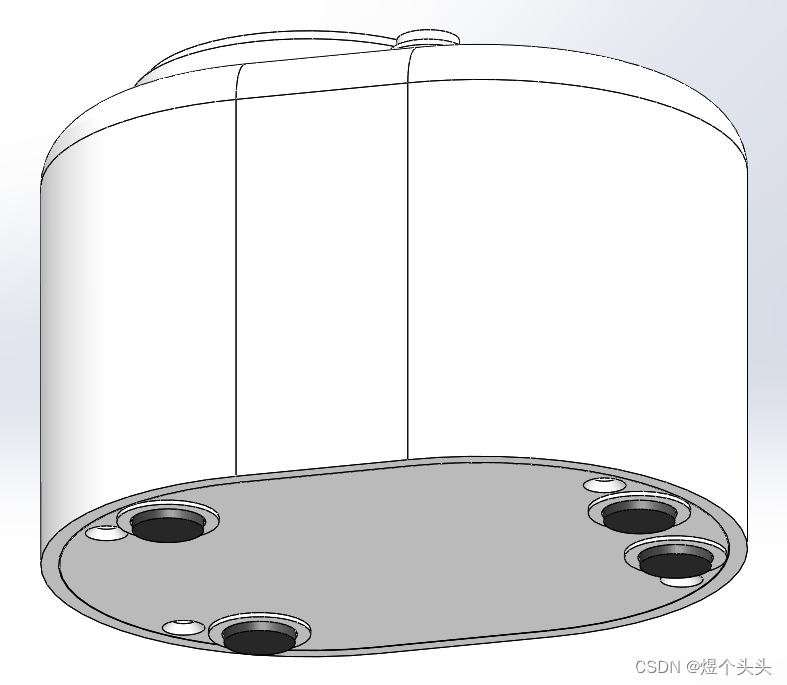
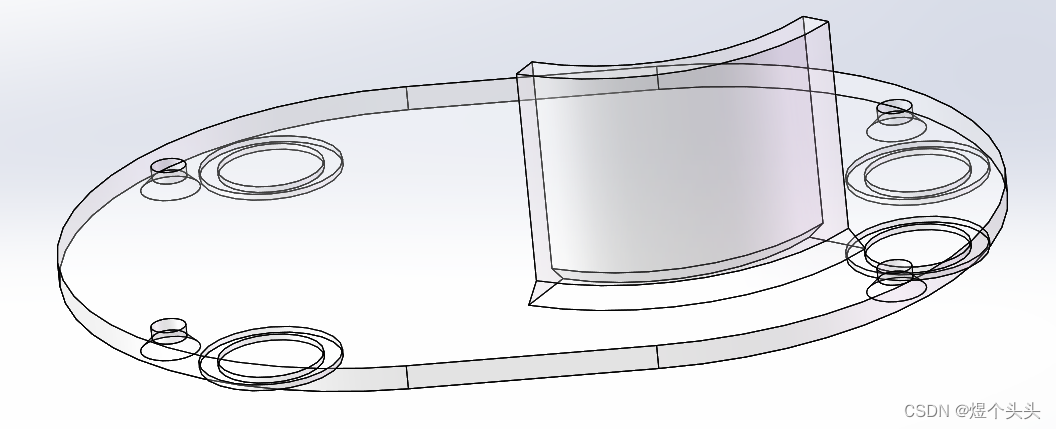
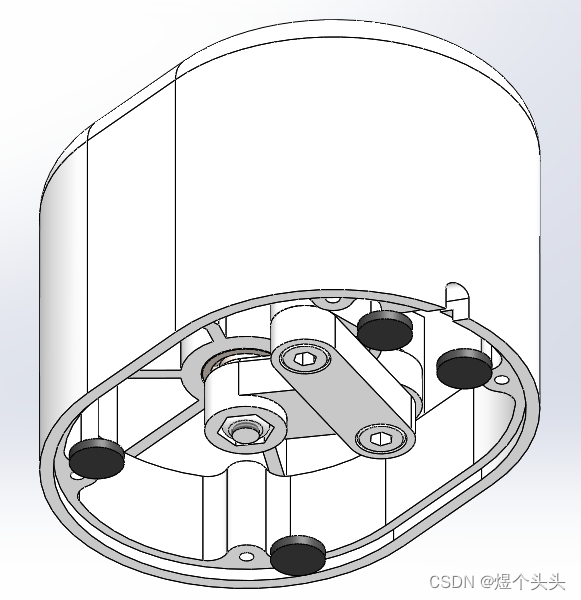
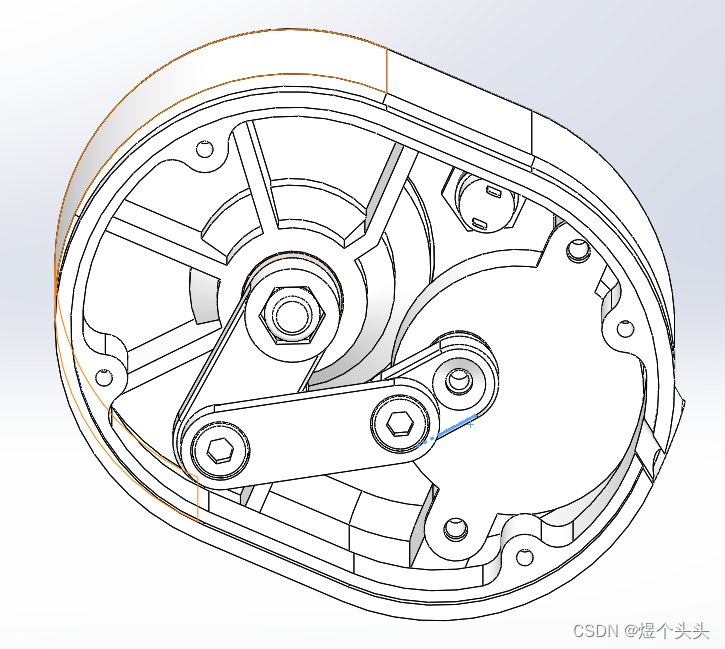
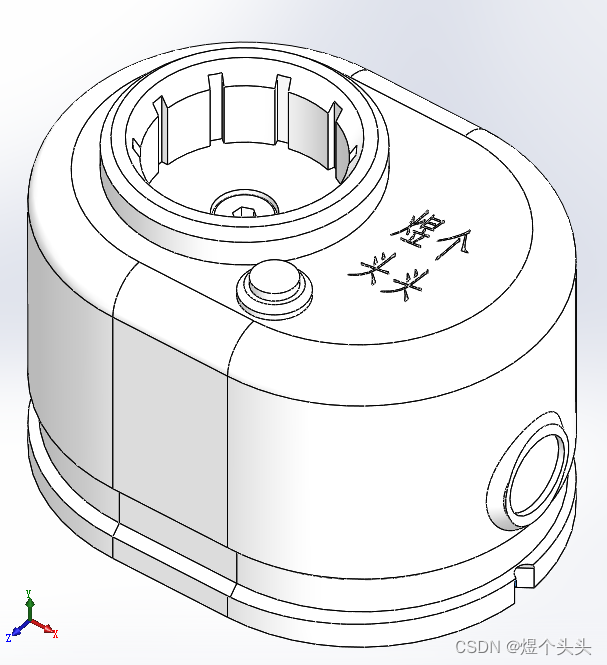
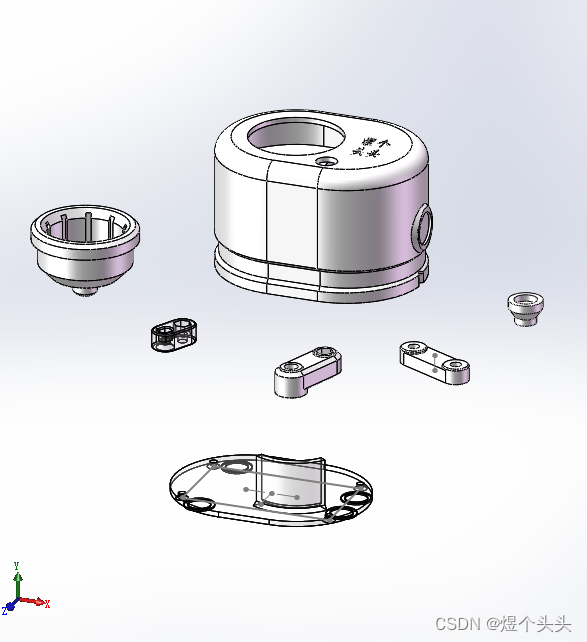
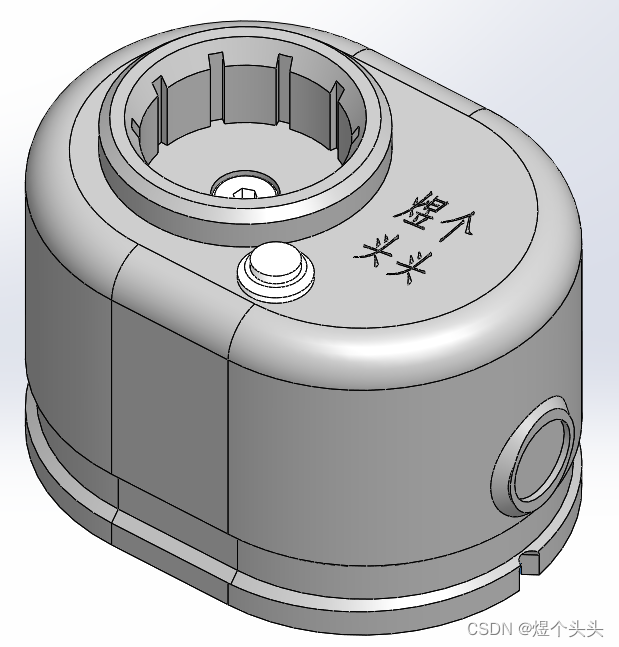
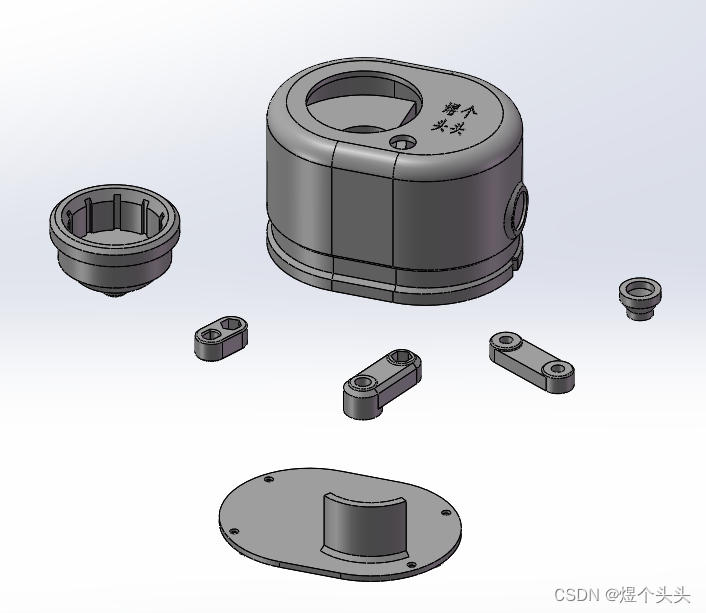
最终模型
完整模型
3D打印零件







![[附源码]计算机毕业设计JAVAjsp宠物店管理系统](https://img-blog.csdnimg.cn/05c3c66aaca14031bb84bf237a8aa2f1.png)