在SNAP中用sentinel-1数据做InSAR
- 0 写在前面
- 1 数据下载
- 2 处理步骤
- 2.1 split
- 2.2 apply orbit 导入精密轨道
- 2.3 查看数据的时空基线base line
- 2.4 back-geocoding 配准
- 2.5 Enhanced Spectral Diversity
- 2.6 Deburst
- 2.7 Interogram Formation 生成干涉图
- 2.8 Multilook 多视
- 2.9 Goldstein Phase Filtering 相位滤波
- 2.10 Subset(可选)
- 2.11 snaphu中的解缠处理
- 2.11.1 snaphu--export 输出为snaphu文件
- 2.11.2 Snaphu-unwrapping 解缠(GUI图形界面)
- 2.11.2 Snaphu-unwrapping 解缠(terminal)
- 2.11.3 snaphu-Import,导入解缠好的文件
- 2.11 Phase to Dispalcement相位转形变
- 2.12 导出成果为tif
0 写在前面
- SNAP版本为8.0.0
- snaphu的安装请参阅博文在SNAP中用sentinel-1数据制作DEM
1 数据下载
- SAR数据:
使用sentinel-1数据,均为下行(Des)数据,数据下载请参阅
哨兵-1 Sentinel-1数据下载(ASF)
哨兵-1 Sentinel-1数据下载(欧空局)- 具体的数据名称为:
S1A_IW_SLC__1SDV_20211229T231926_20211229T231953_041230_04E66A_3DBE ***Des
S1A_IW_SLC__1SDV_20220110T231926_20220110T231953_041405_04EC57_103E ***Des
-
DEM数据:
使用的DEM数据为欧空局COP 30m
下载方法请参阅QGIS下载各种DEM的插件(SRTM 90m/30m -ALOS 30m -Cop 30m/90m-NASADEM Global DEM)
当然了,你也可以使用SRTM,如果网络条件好,SNAP也会自动下载DEM,包括上述数据。 -
精密轨道数据
这个不必多说,一定是最精密的POEORB数据,SNAP会根据数据自动下载,如果想手动下载,请参阅3种方法下载Sentinel-1精密轨道数据
2 处理步骤
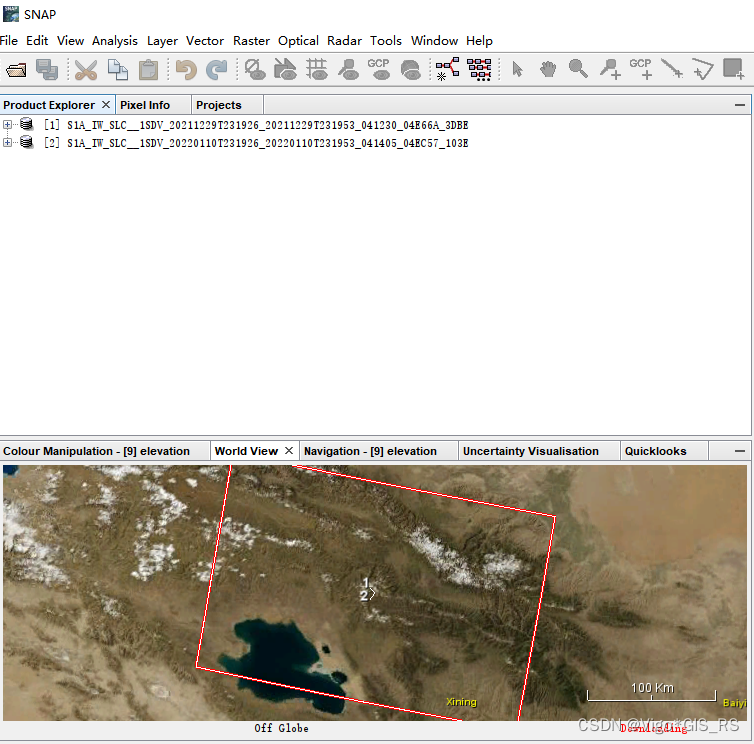
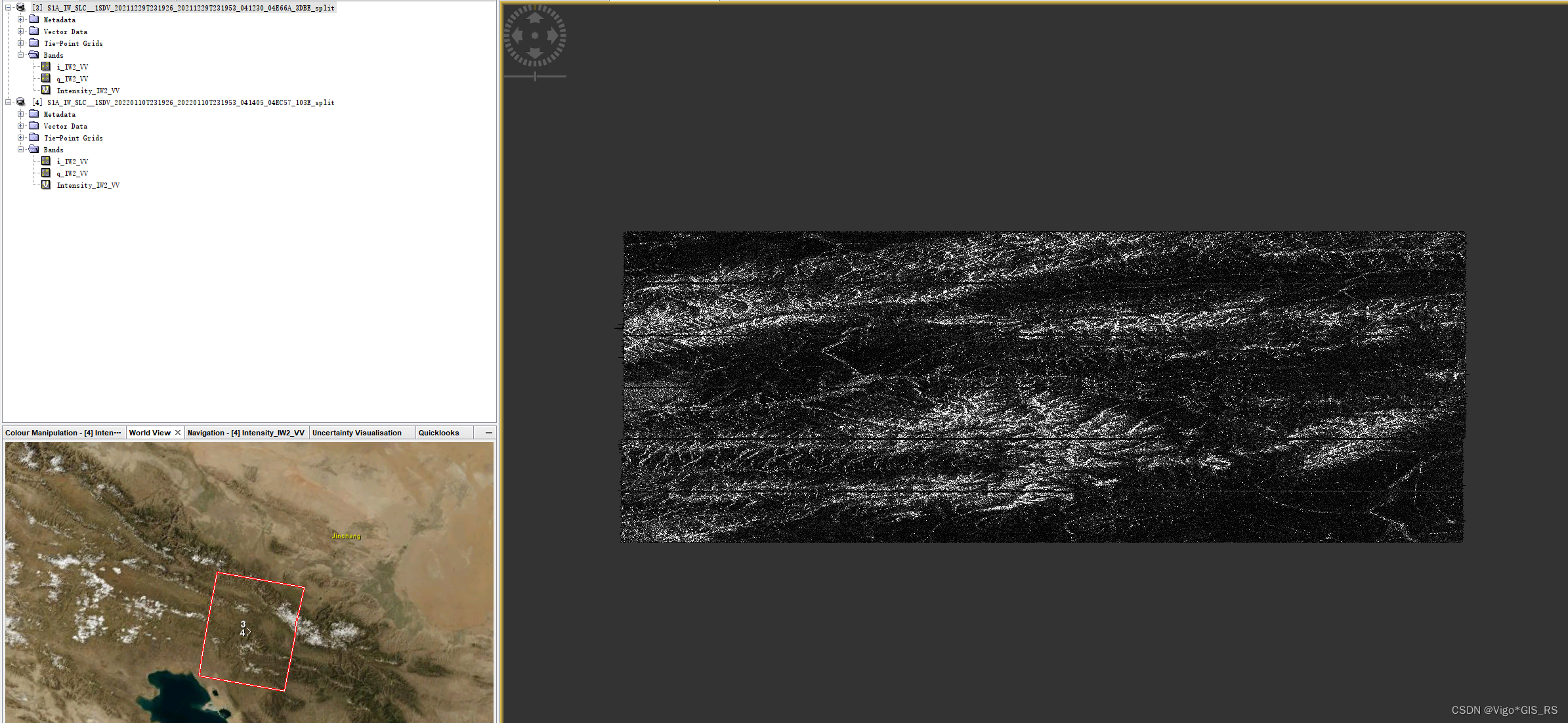
- 把数据压缩包拖进SNAP
2.1 split
- 工具路径为
Radar--Sentinel-1 TOPS--S-1 TOPS Split
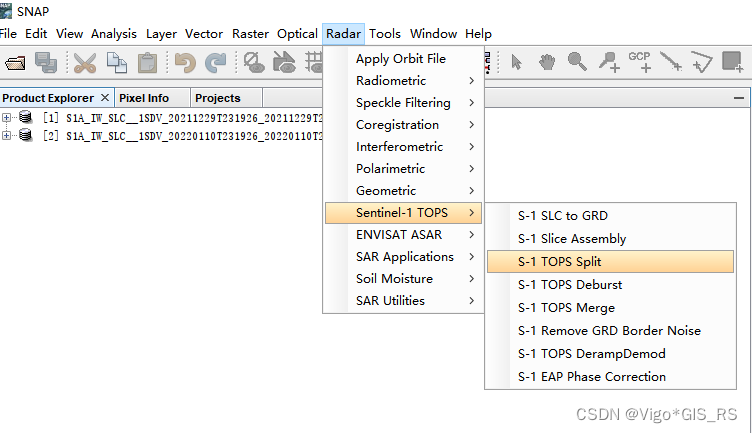
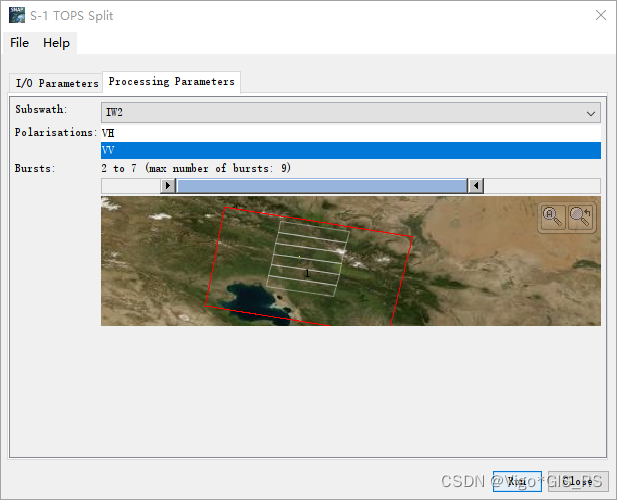
- 选择数据,两景都要做split
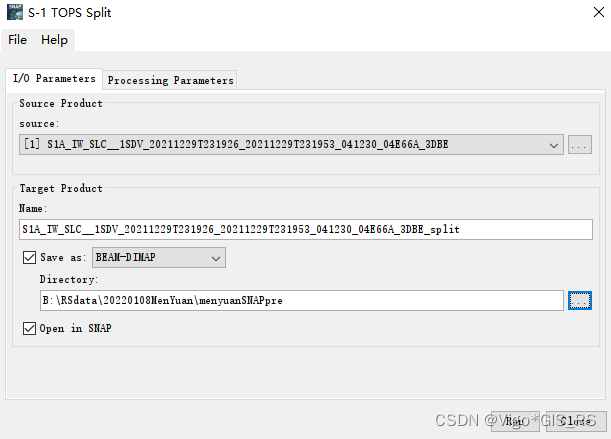
- 选择subswath、pol(极化)、burst。这里我选择的是IW2、VV极化、2-7bursts,所有数据的设置要一致。选择brust的时候,鼠标拖动两遍的三角形,就可以移动位置了。设置好后点击RUN即可。
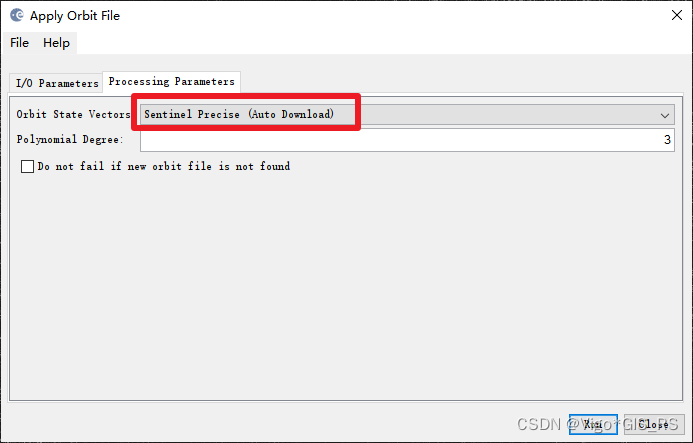
2.2 apply orbit 导入精密轨道
- 工具路径
Radar--Apply Orbit File
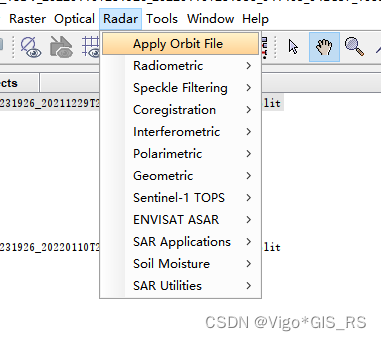
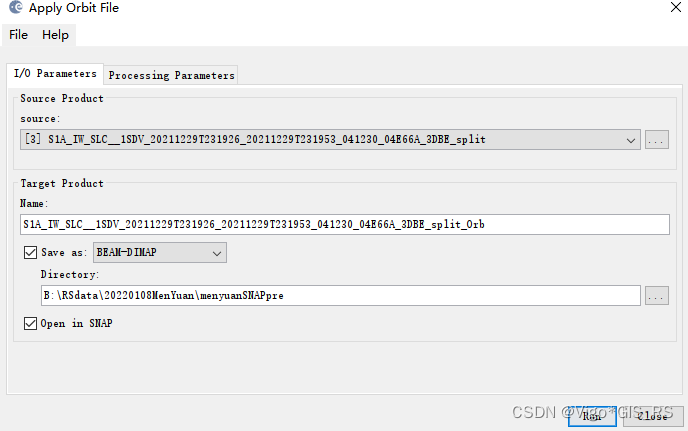
- 选择Sentinel Precise(Auto Download)
2.3 查看数据的时空基线base line
- 工具路径
Radar--Interferometic--InSAR SAtack Overview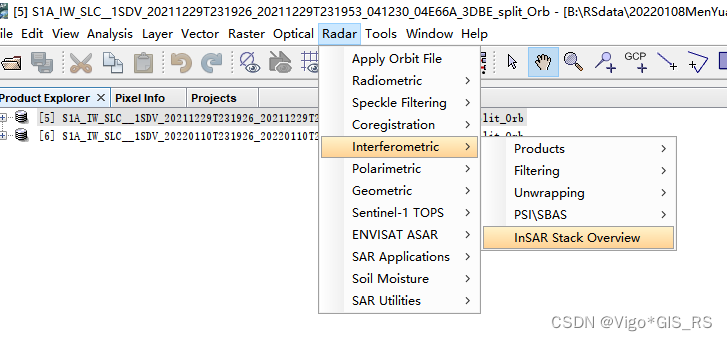
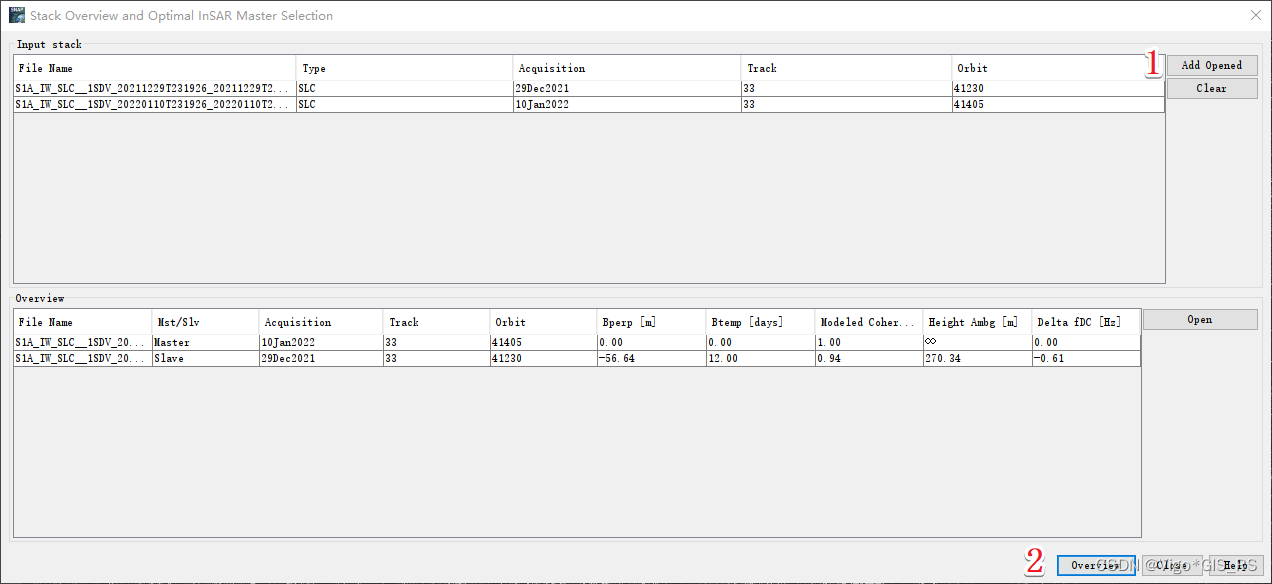
- 点击Add Opened(我打开的是_orbit数据),再点击Overview,可以看到时间基线(Btemp)12天,空间基线(Bperp)56.64米,模拟相干系数(Modeld Coherence)0.94,说明还不错,当然,做形变的空间基线越短越好。
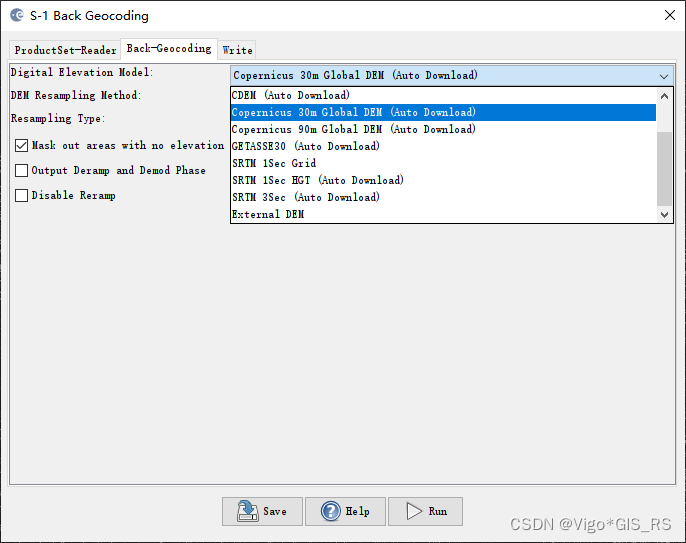
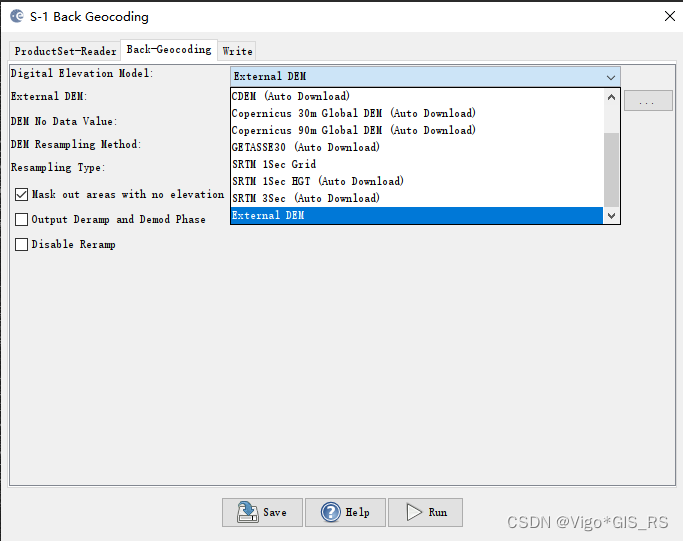
2.4 back-geocoding 配准
- 工具路径:
Radar--Coregistration--S1 TOPS Coregistration--S-1 Back Geocoding
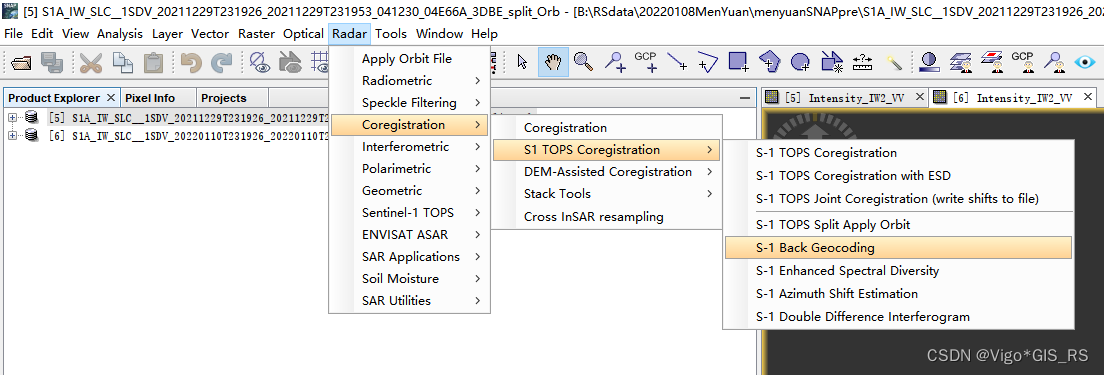
- 添加数据,第一行为主影像。如果数据较多,请结合上一节的时空基线选择主影像。

- 选择参考DEM,精度越高越好,可以自动下载,也可以选择电脑上已经下载好的DEM,这里我选择的是自动下载COP30。
2.5 Enhanced Spectral Diversity
- 工具路径
Radar--Coregistration--S1 TOPS Coregistration--S1 Enhanced Spectral Diversity
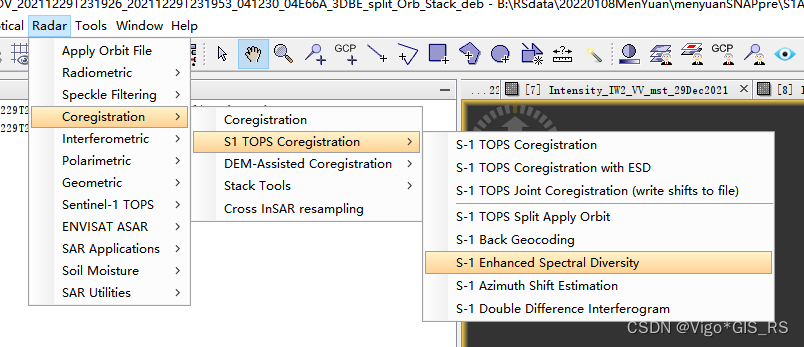
默认即可
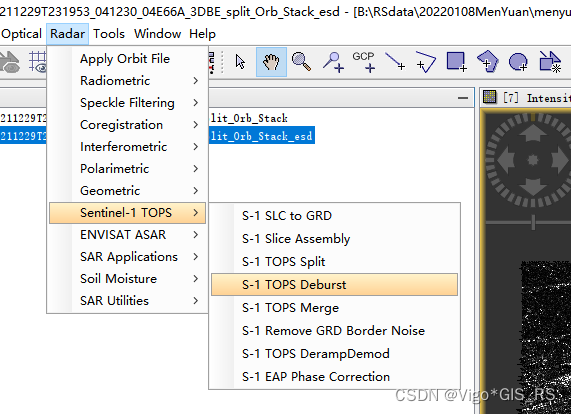
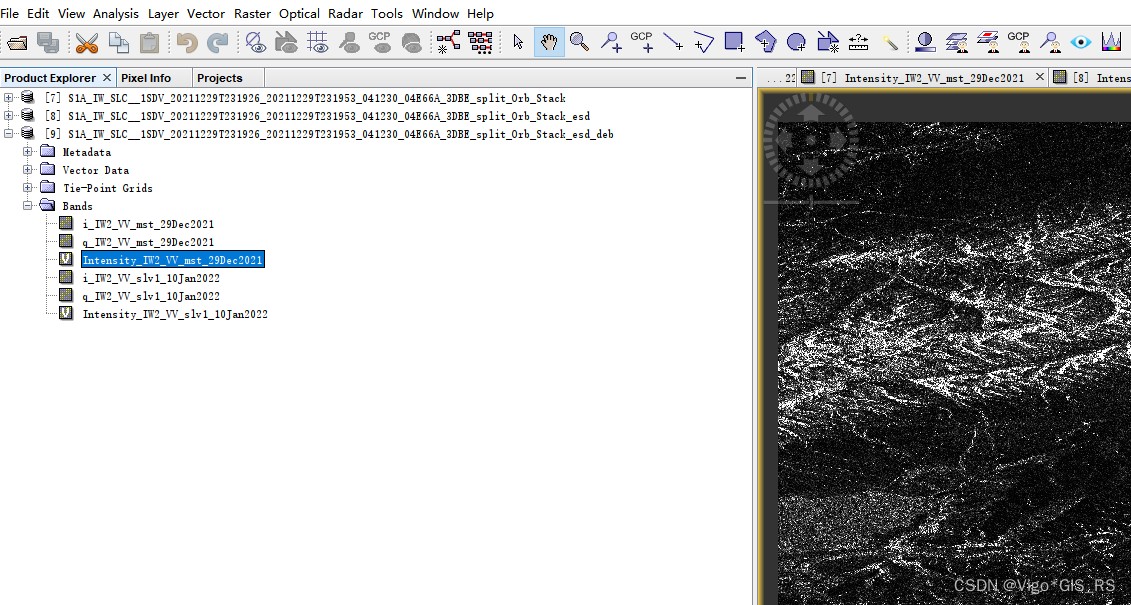
2.6 Deburst
就是把这些burst的缝接起来
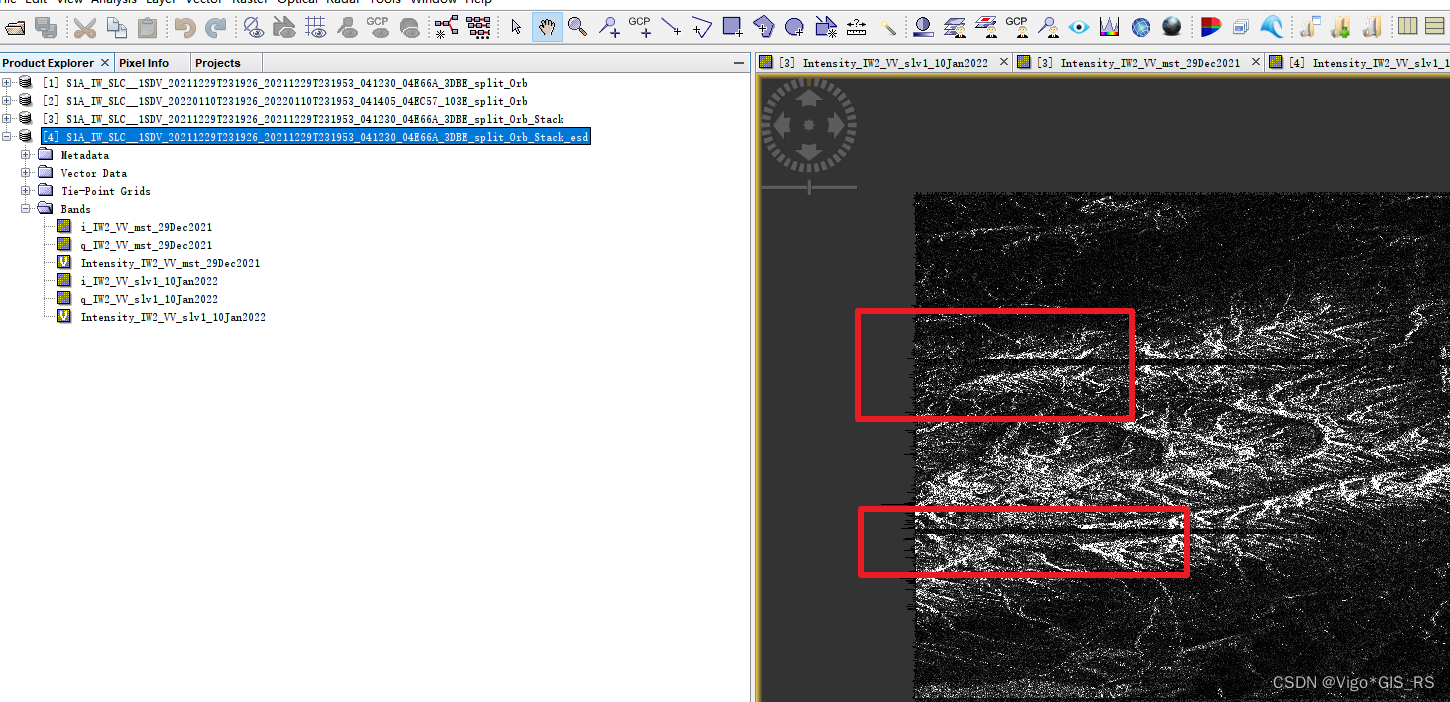
- 工具路径
Radar--Sentinel-1 TOPS--S-1 TOPS Deburst
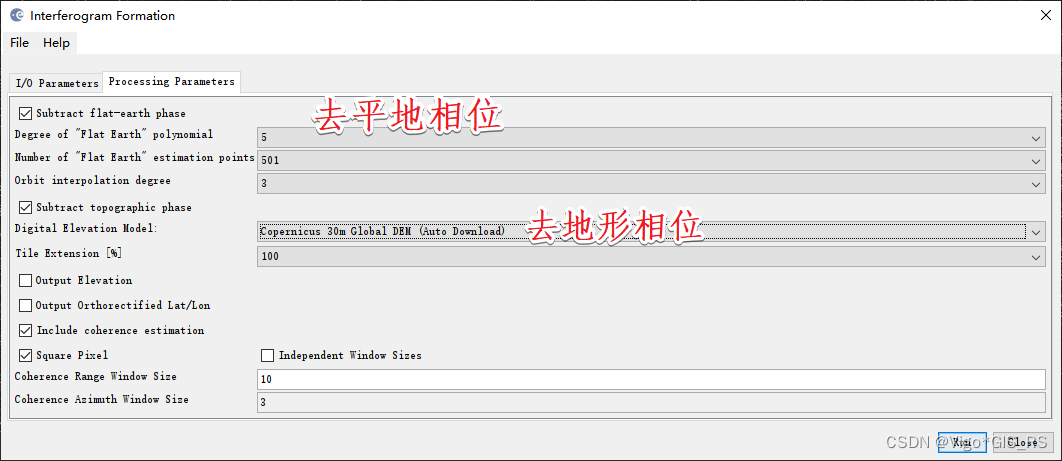
2.7 Interogram Formation 生成干涉图
- 工具路径
Radar--Interferometic--Products--Interferogram Formation
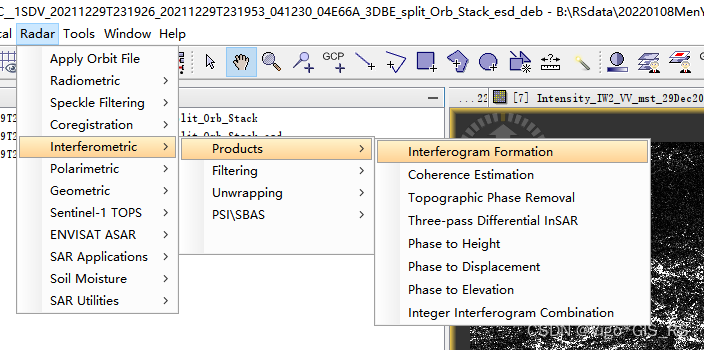
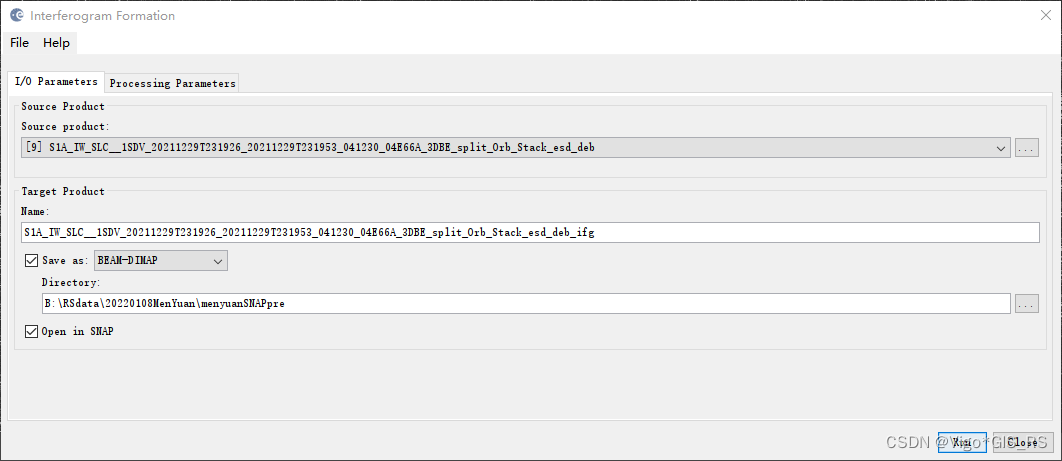
- 去平地相位、去地形相位;如果想制作DEM,则不需要去地形相位,参阅博文在SNAP中用sentinel-1数据制作DEM
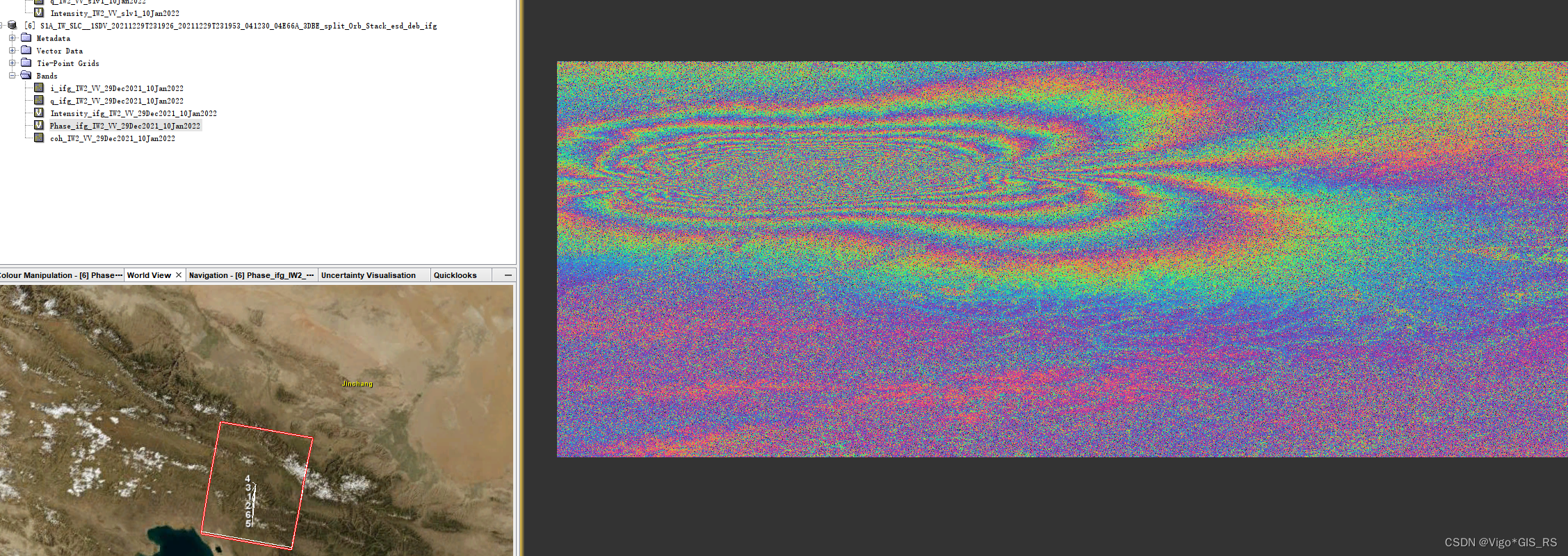
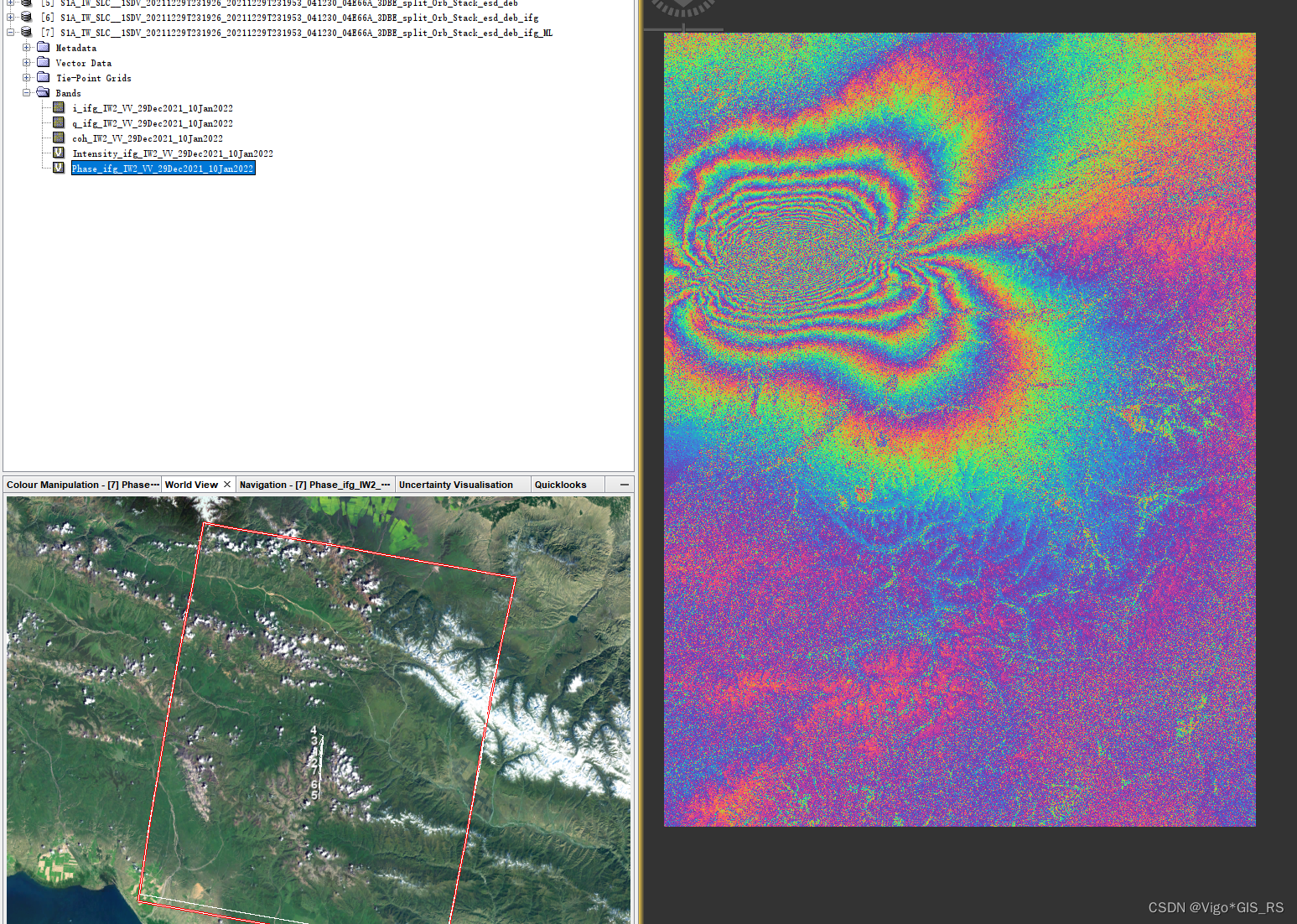
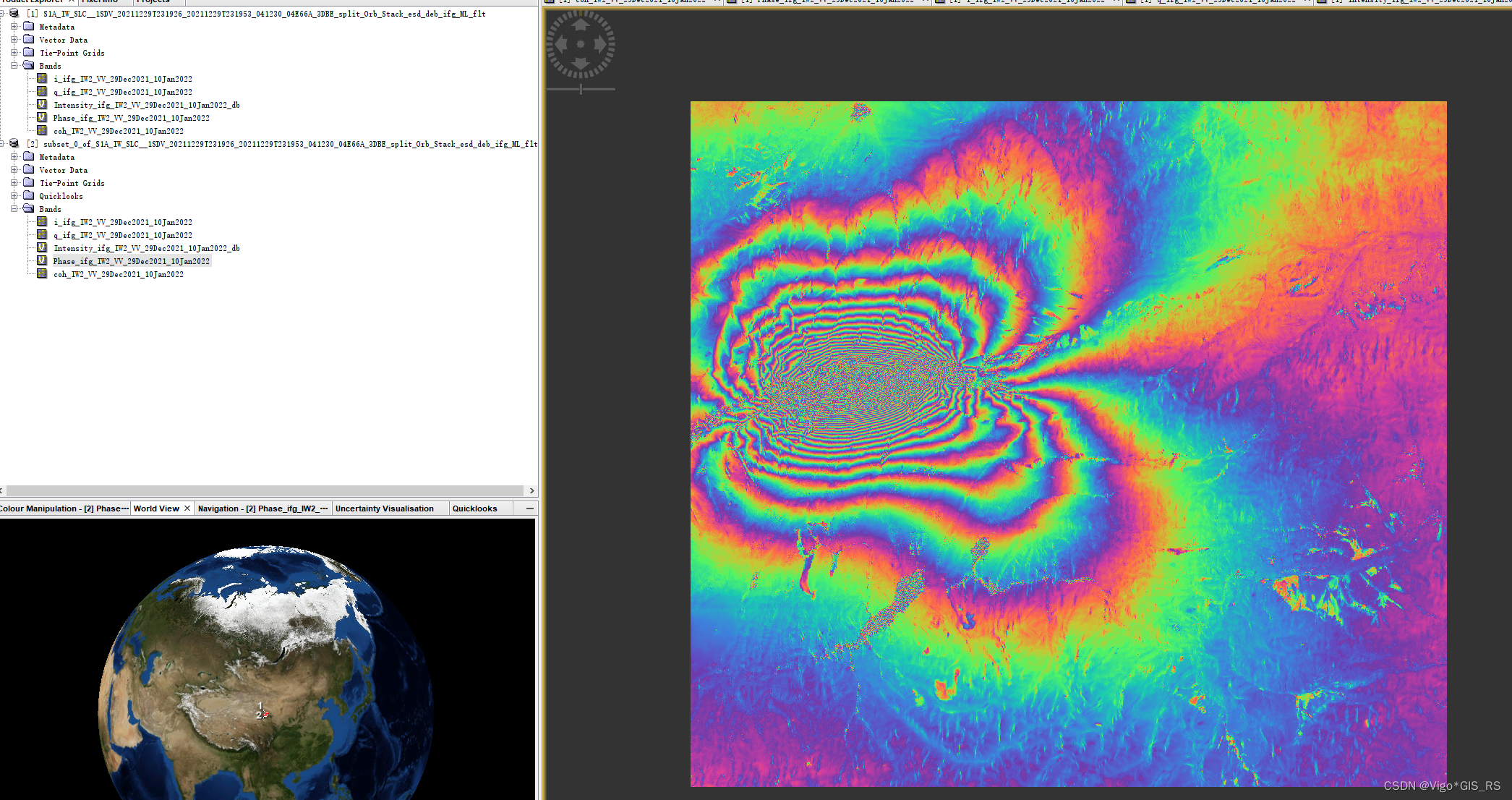
- 近乎完美的蝴蝶纹
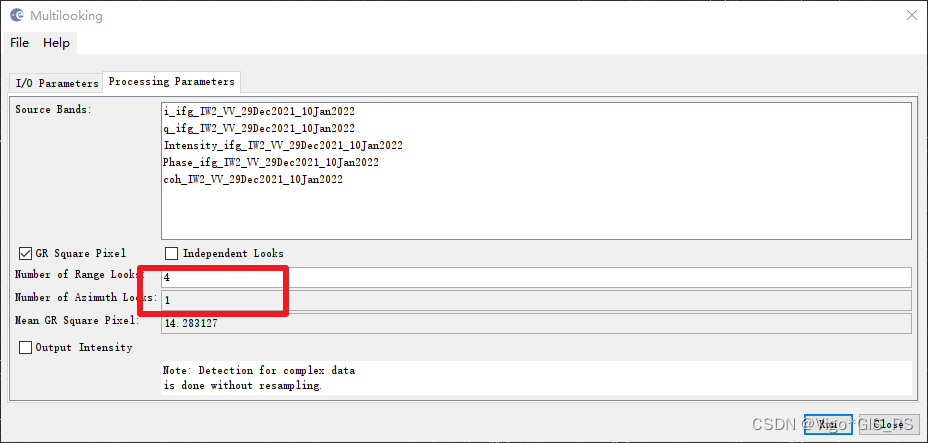
2.8 Multilook 多视
- 工具路径:
Radar--SAR Utilities--Multilook
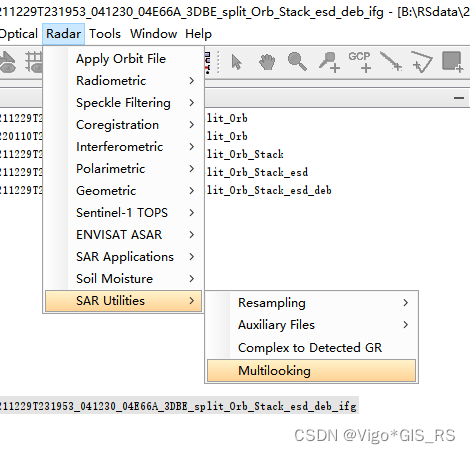
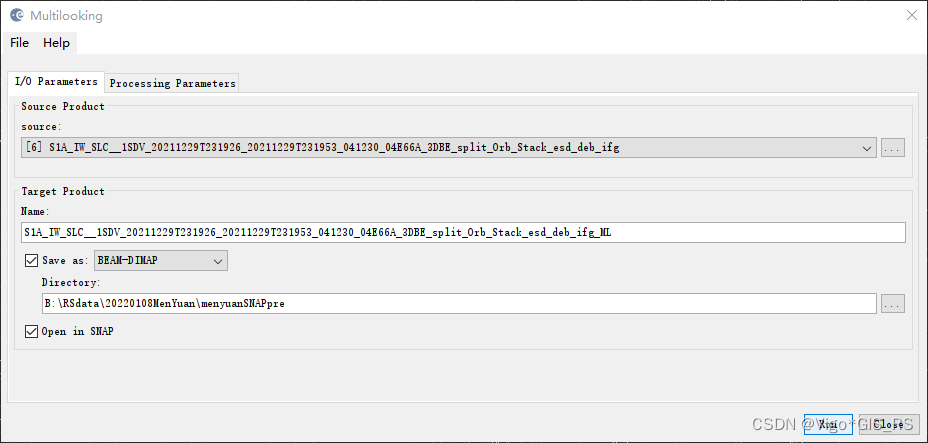
- 多视比默认为4:1,地距分辨率大概为14m
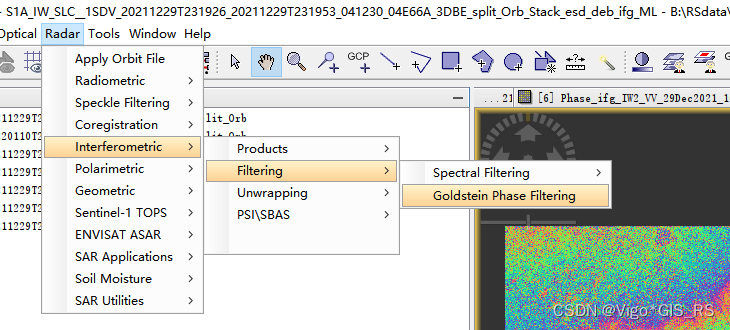
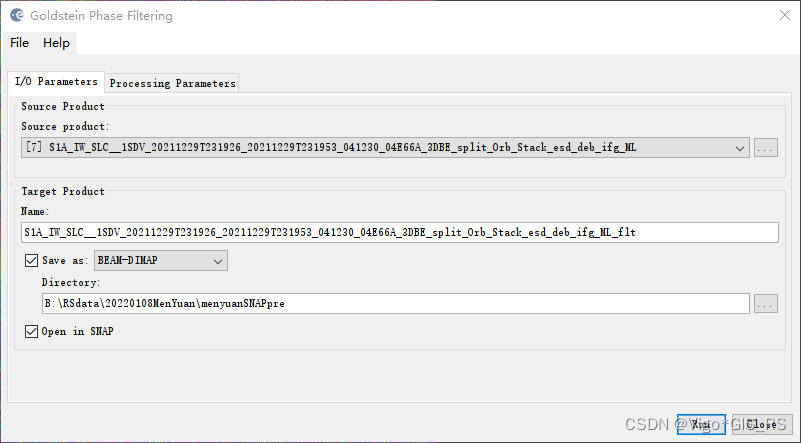
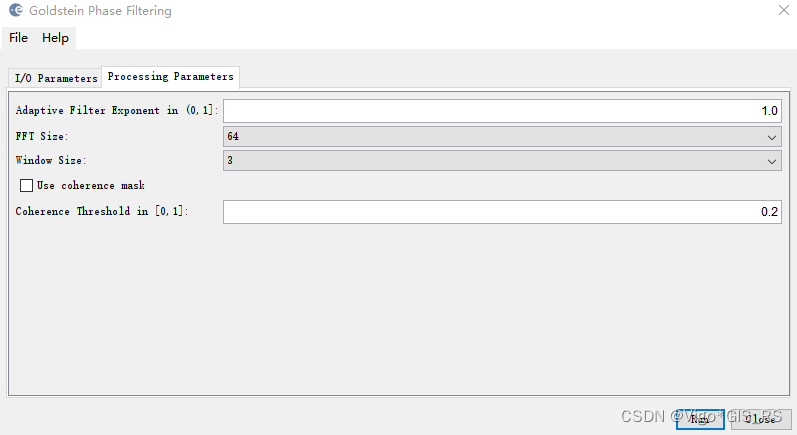
2.9 Goldstein Phase Filtering 相位滤波
- 工具路径
Radar--Interferometic-Filtering--Goldstein Phase Filtering
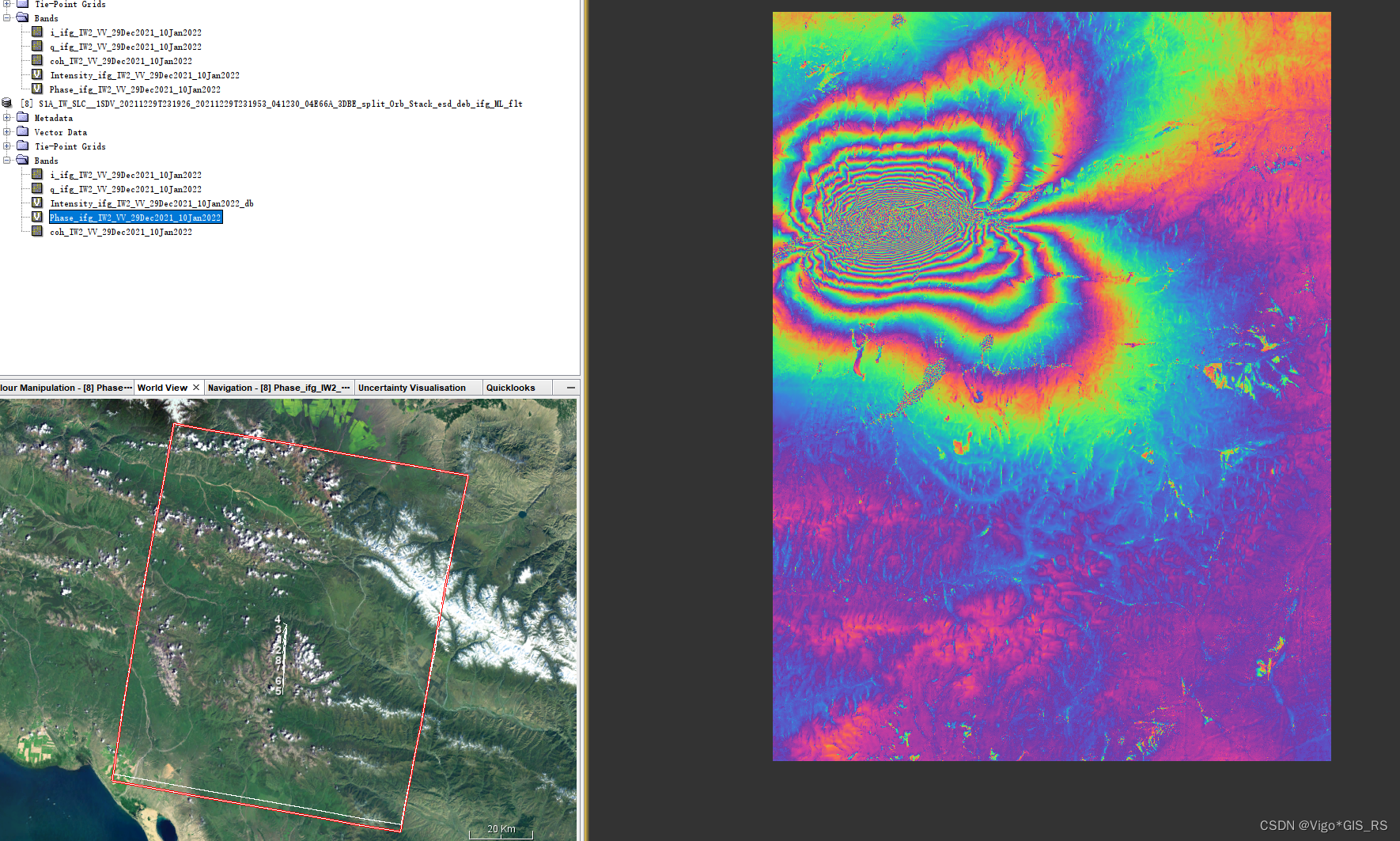
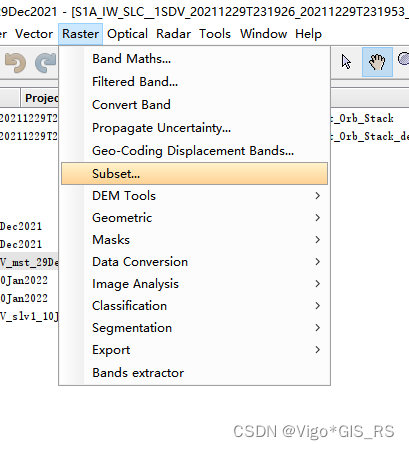
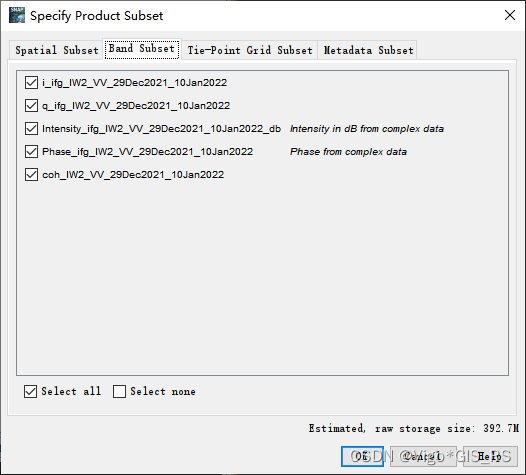
2.10 Subset(可选)
- 工具路径
Radar-Subset
- 参照flt之后的缠绕相位的图片,裁剪研究区,设定好范围之后,其他默认。
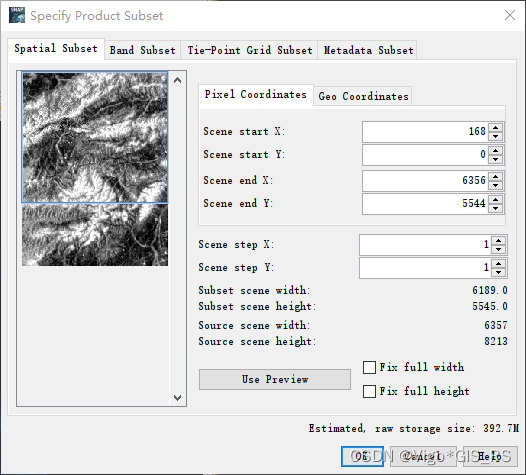
- 这是裁剪之后的范围
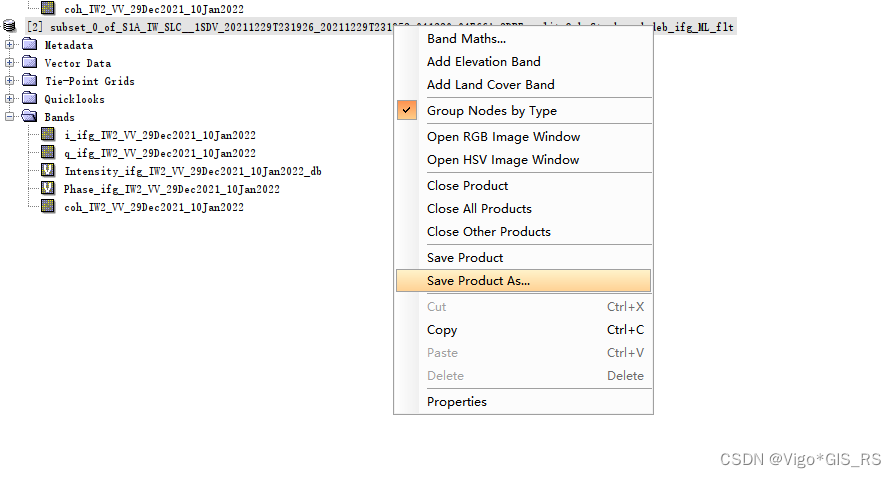
- 将裁剪后的成果save as。
2.11 snaphu中的解缠处理
snaphu的安装请参阅博文在SNAP中用sentinel-1数据制作DEM
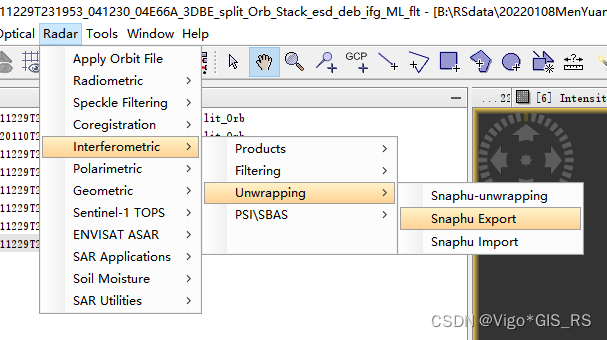
2.11.1 snaphu–export 输出为snaphu文件
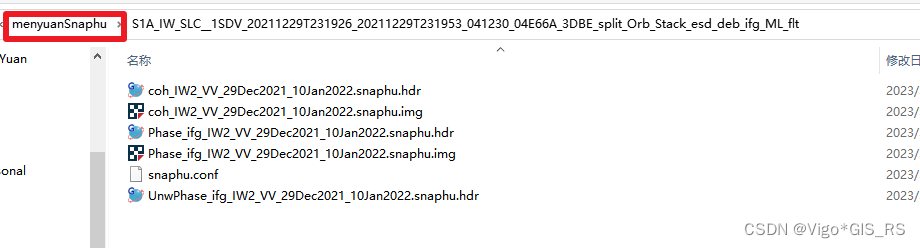
这个意思是把数据导出成snaphu能处理的格式,所以这里文件夹的命名就要有snaphu相关的字符。导出之后要到文件夹中找到相关文件
-
工具路径
Radar--Interferometic--Unwrapping--Snaphu Export
-
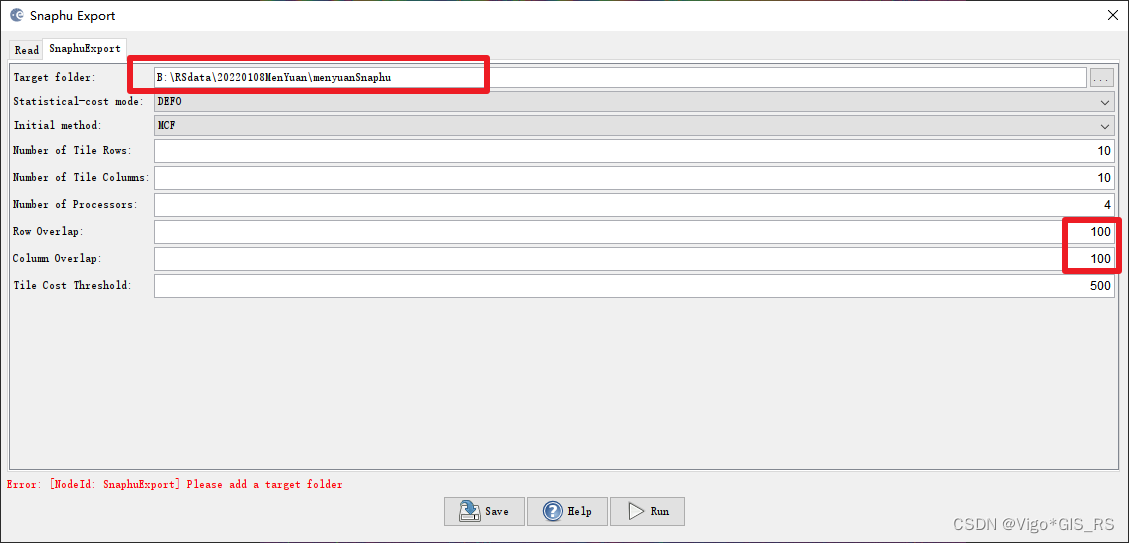
设置导出路径,注意看这里的几个参数,包括分块、同时处理的块的数量、块之间的重叠,如果分块太多,块之间的重叠面积太小,可能会因为相位孤岛而导致解缠失败。当然,分块数量也是和电脑性能有关的,如果电脑性能若,就分块多一些,如果电脑性能好,就分块少一些,不管怎么分块,都要设置合适的重叠
-
这里我设置了两中不同的参数:
-
- 第一个是分成10*10=100块,同时处理4块,块间重叠为100
- 第一个是分成10*10=100块,同时处理4块,块间重叠为100
- 第二个是分块1*1=1,此时同时处理块数和块间已经无意义。
-
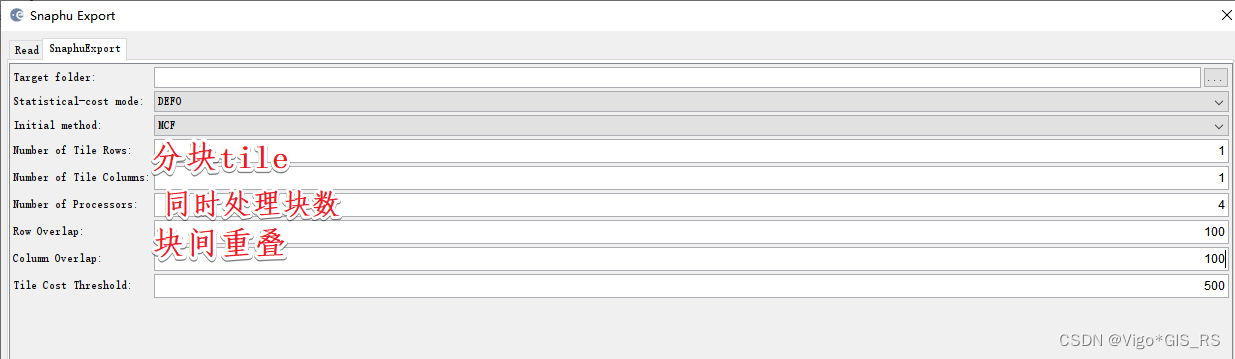
如果不分块,只有一块的话,处理时间可能比较久。
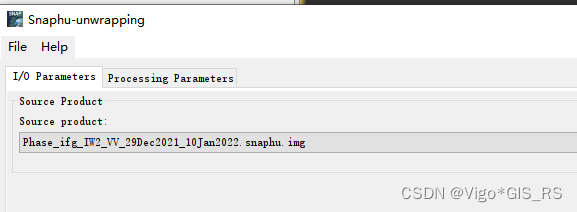
2.11.2 Snaphu-unwrapping 解缠(GUI图形界面)
-
工具路径
Radar--Interferometic--Unwrapping--Snaphu-unwrapping

-
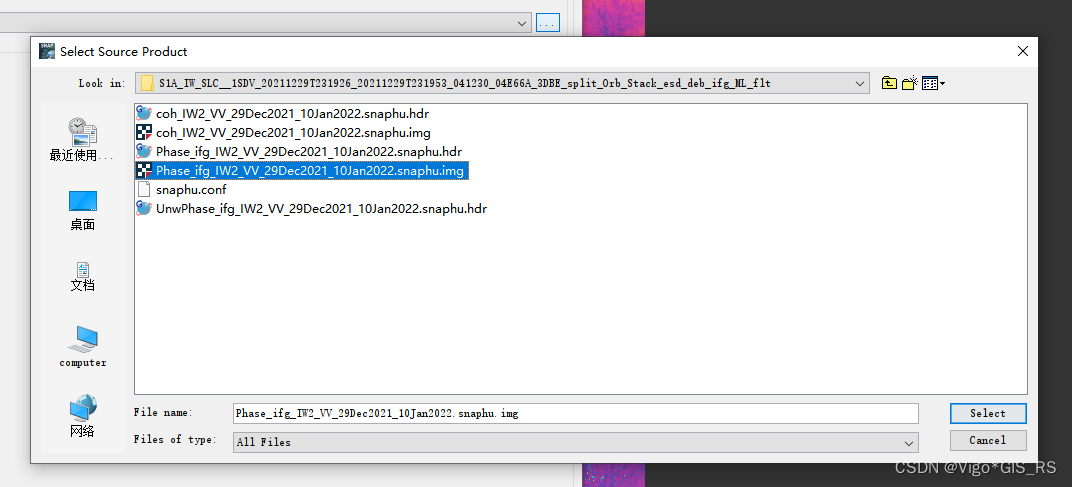
选择phase开头的snaphu.img格式的文件
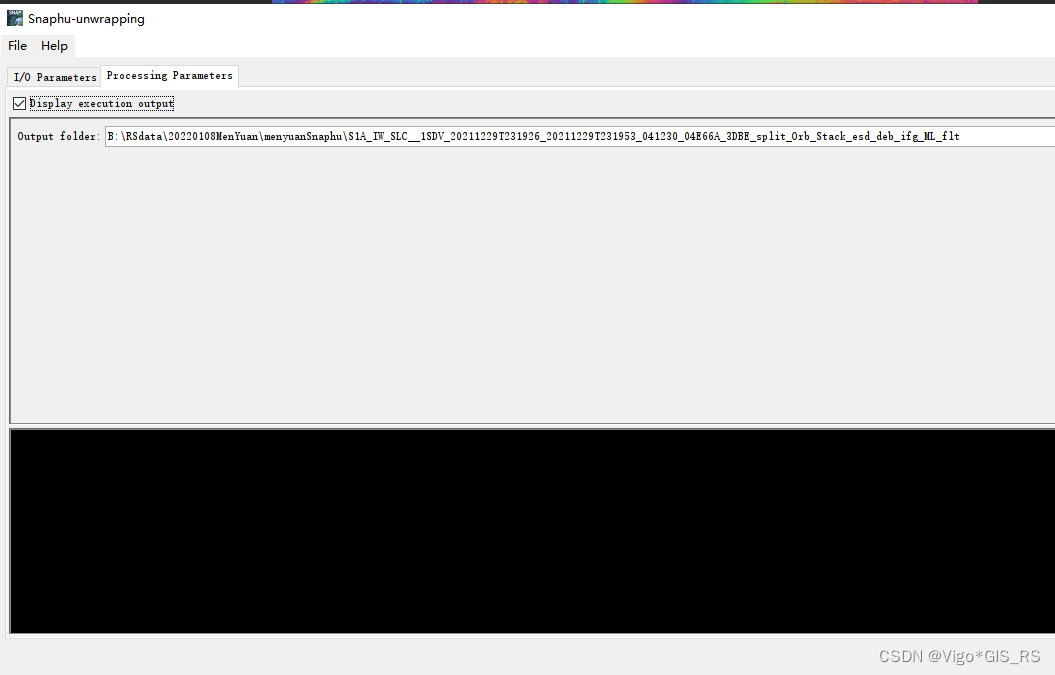
-
这里解缠后导出的路径一定要精确到UnwPhase开头snaphu.hdr结尾的文件所在的文件夹。
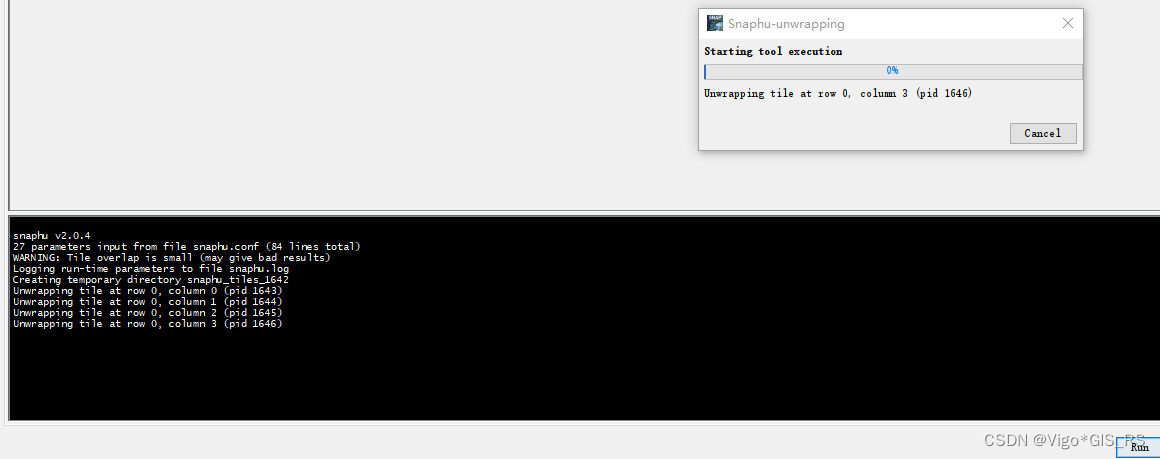
-
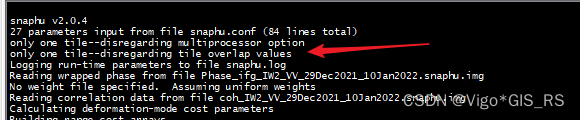
解缠耗时较长,黑色界面会显示解缠进程。
2.11.2 Snaphu-unwrapping 解缠(terminal)
- linux系统
- 在之前snaphu–export的文件夹中打开terminal
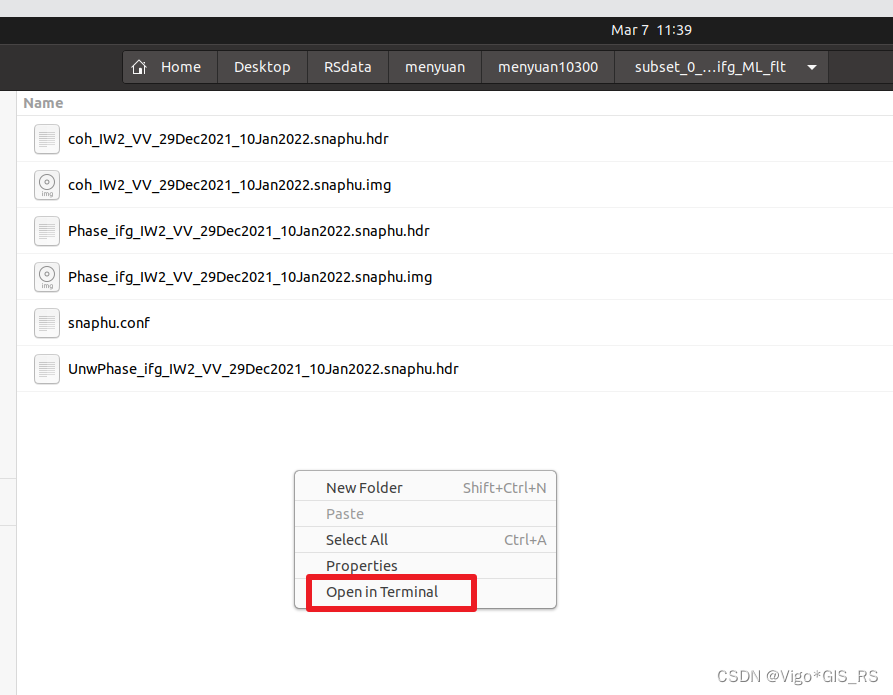
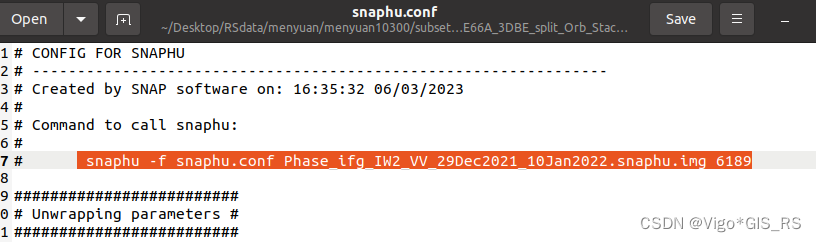
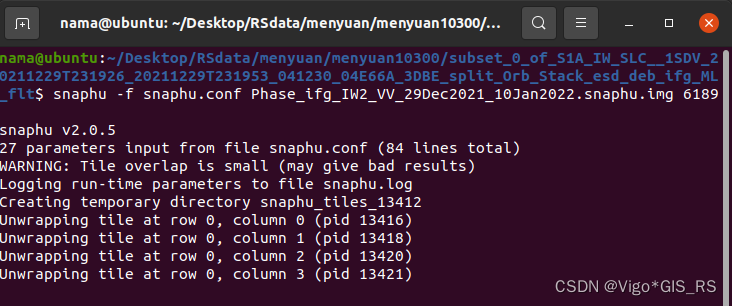
- 打开snaphu.conf文件,复制snaphu -f …… 这一行,在terminal中粘贴并执行。
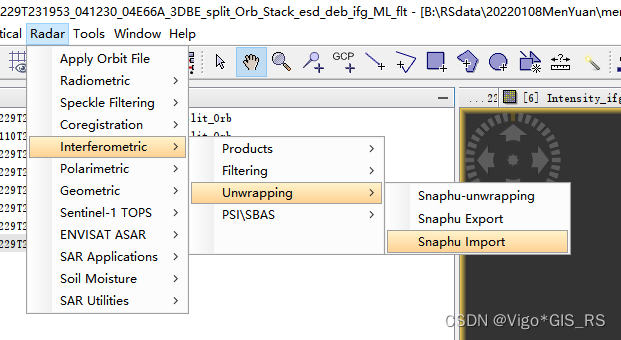
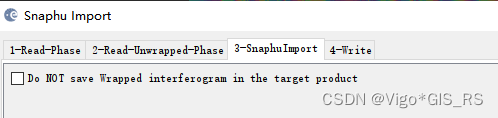
2.11.3 snaphu-Import,导入解缠好的文件
-
工具路径
Radar--Interferometic--Unwrapping--Snaphu Import
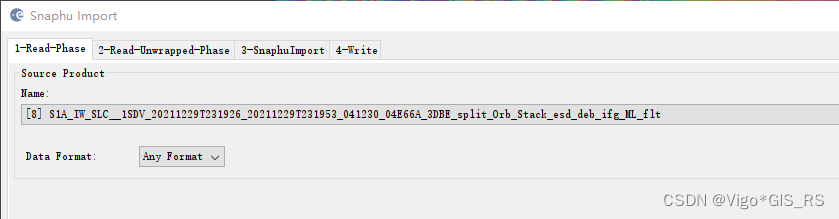
-
1- Read-Pahse选择之前做好的flt文件
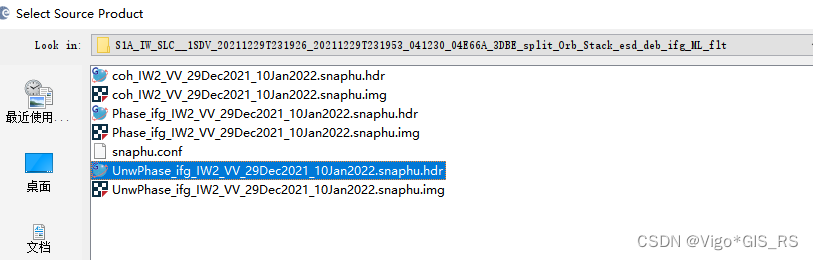
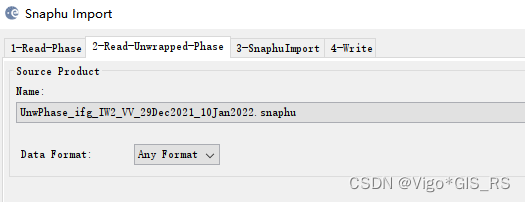
-
2- Read-Unwrapped-Phase选择上一步解缠后的UnwPhase开头snaphu.hdr结尾的文件
-
3-snaphuimport默认
-
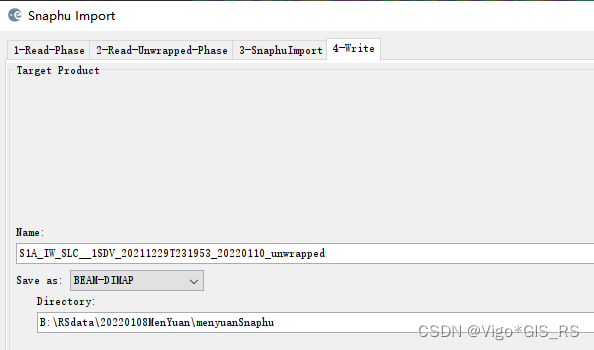
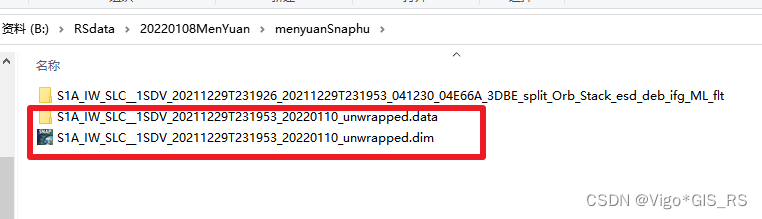
4- Write 选择写入路径,就是转换成snap格式。
-
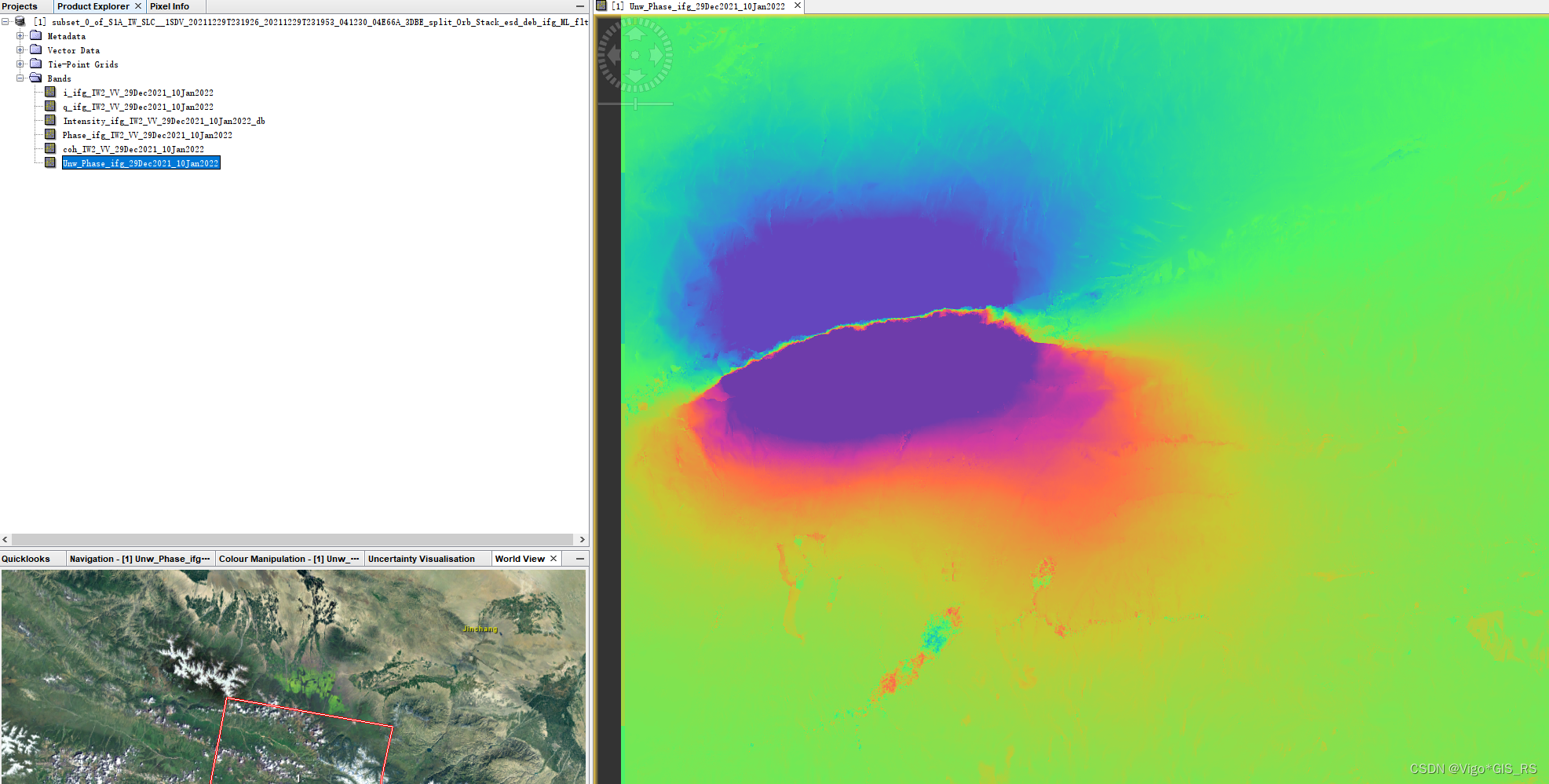
可见,S1A_IW_SLC__1SDV_20211229T231953_20220110_unwrapped.dim就是解缠后的SNAP格式的文件。
- 解缠结果
- 上文提到的第一种分块4*4=16的解缠结果,重叠100,可见解缠结果不太好
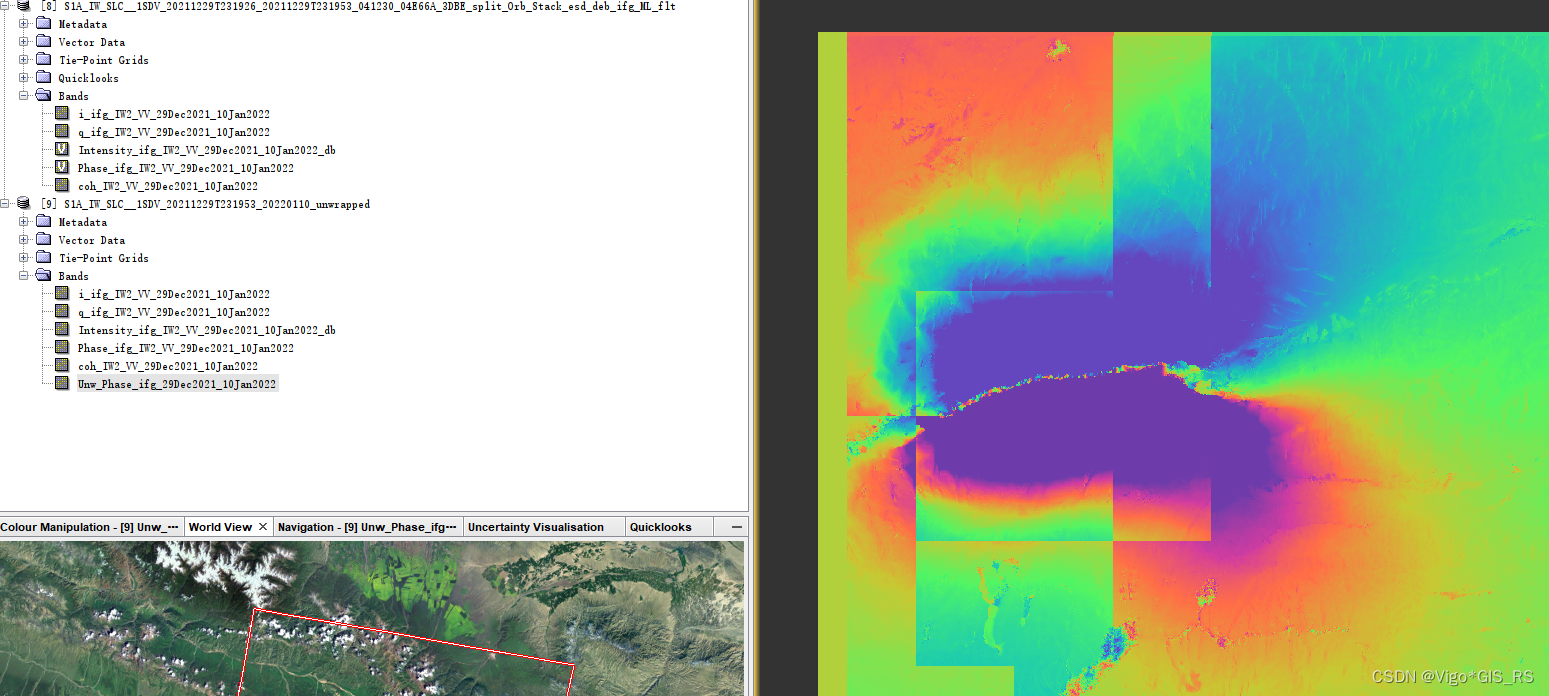
- 上文提到的第二种分块6*6=36的解缠结果,效果较好。但是这种设置是看电脑配置(尤其是内存)和数据量的,所以要多试试,且相同配置,在不同时候也看跑出不同的结果,这也是snaphu有时候的bug。
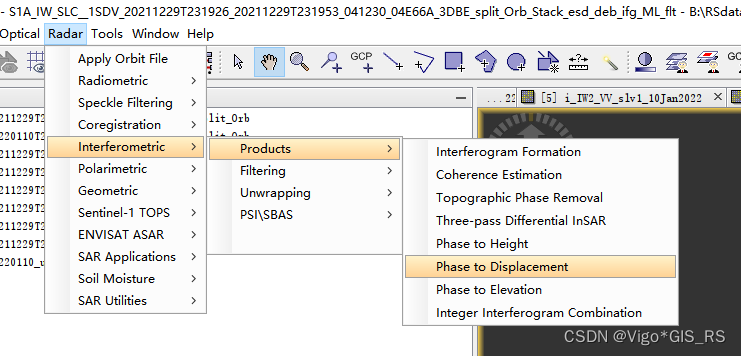
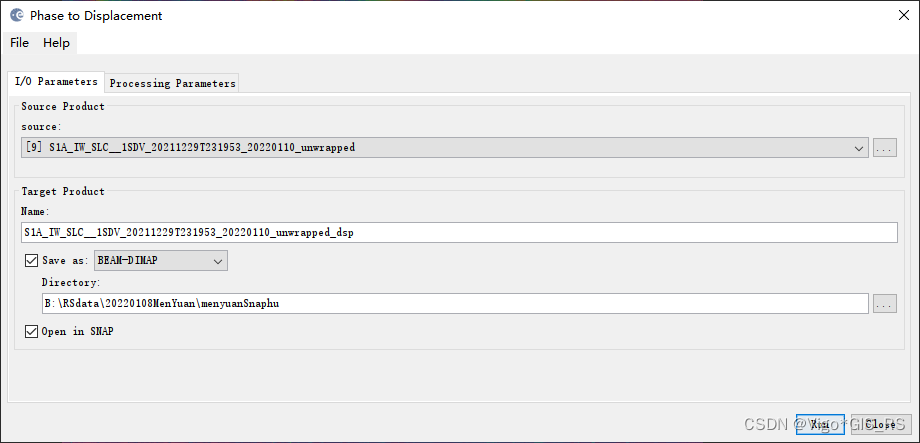
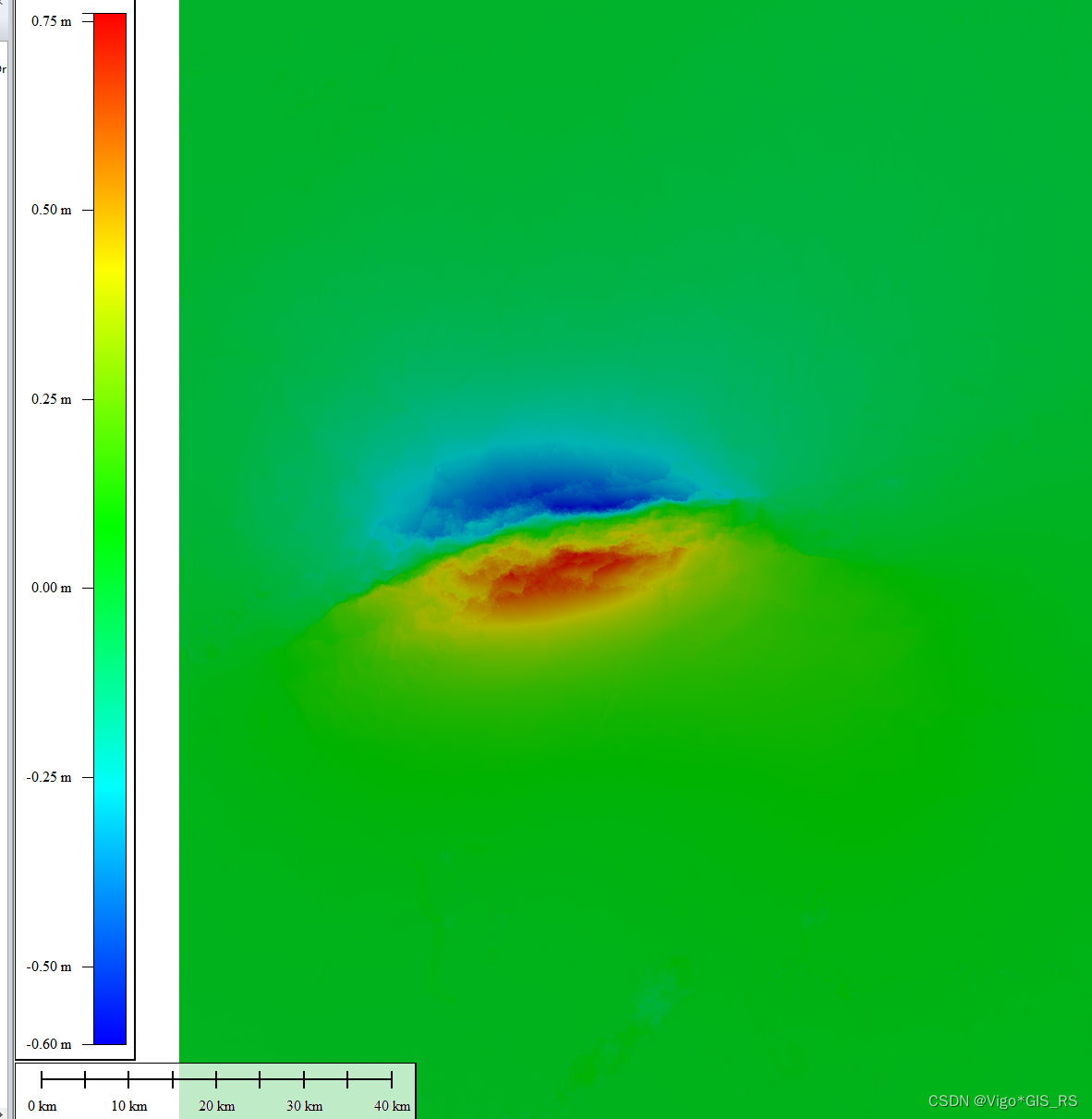
2.11 Phase to Dispalcement相位转形变
- 工具路径
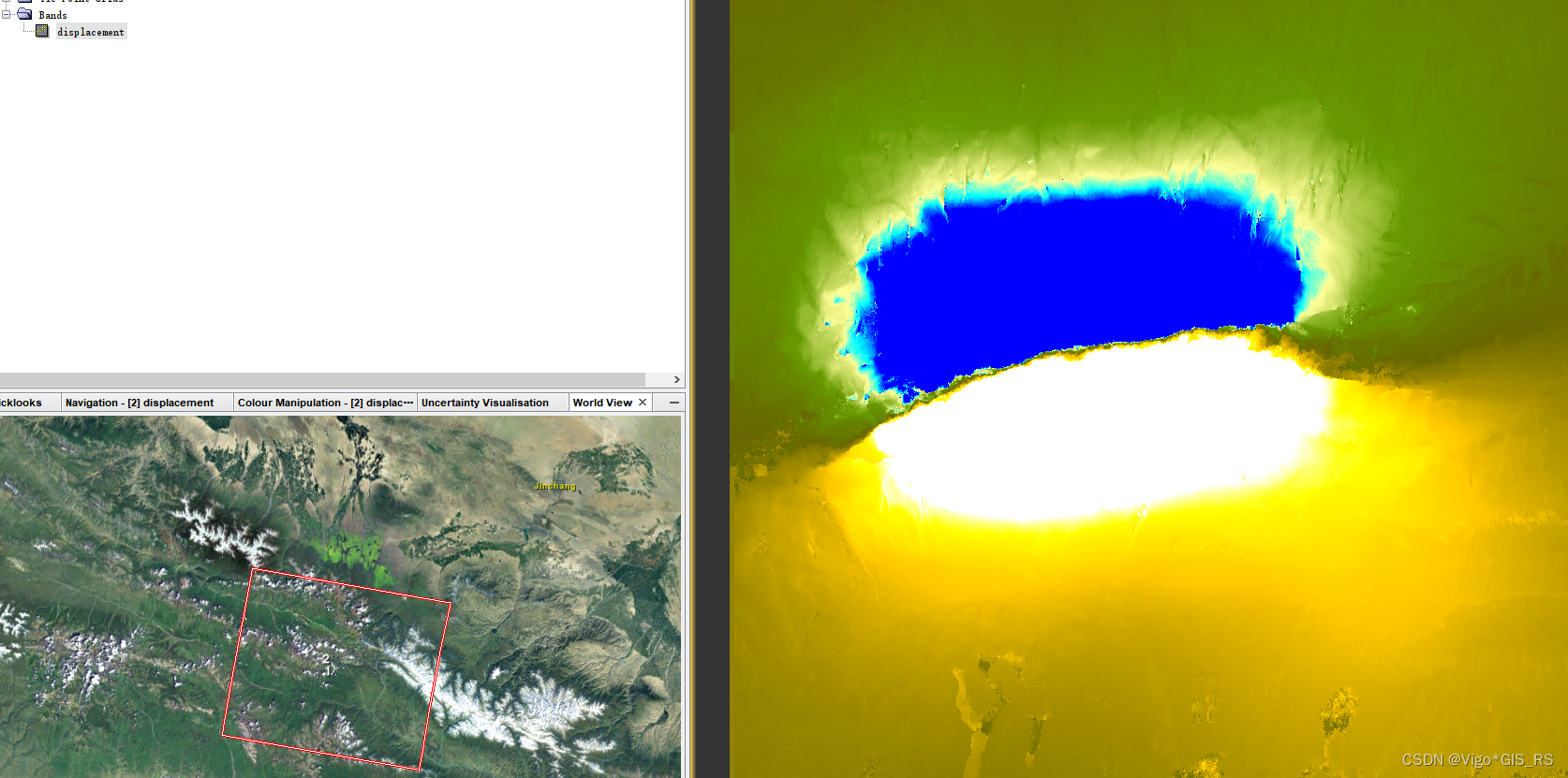
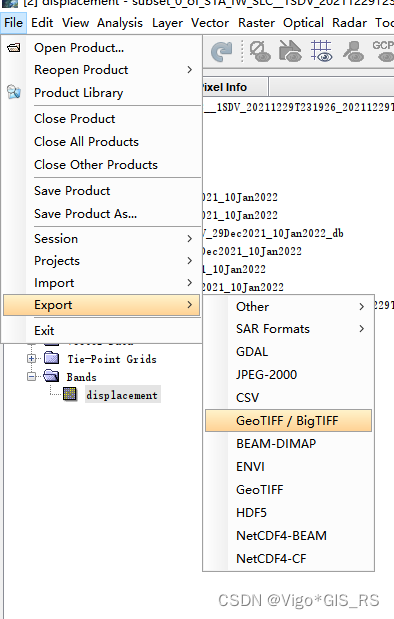
2.12 导出成果为tif
- 点击数据名称(displacement),点击左上角的file–export–GeoTIFF/BigTIFF,选择文件夹,导出即可。
感谢阅读!