题目描述
给你一个无向图(原始图),图中有 n 个节点,编号从 0 到 n - 1 。你决定将图中的每条边 细分 为一条节点链,每条边之间的新节点数各不相同。
图用由边组成的二维数组 edges 表示,其中 edges[i] = [ui, vi, cnti] 表示原始图中节点 ui 和 vi 之间存在一条边,cnti 是将边 细分 后的新节点总数。注意,cnti == 0 表示边不可细分。
要 细分 边 [ui, vi] ,需要将其替换为 (cnti + 1) 条新边,和 cnti 个新节点。新节点为 x1, x2, …, xcnti ,新边为 [ui, x1], [x1, x2], [x2, x3], …, [xcnti+1, xcnti], [xcnti, vi] 。
现在得到一个 新的细分图 ,请你计算从节点 0 出发,可以到达多少个节点?如果节点间距离是 maxMoves 或更少,则视为 可以到达 。
给你原始图和 maxMoves ,返回 新的细分图中从节点 0 出发 可到达的节点数 。示例 1:
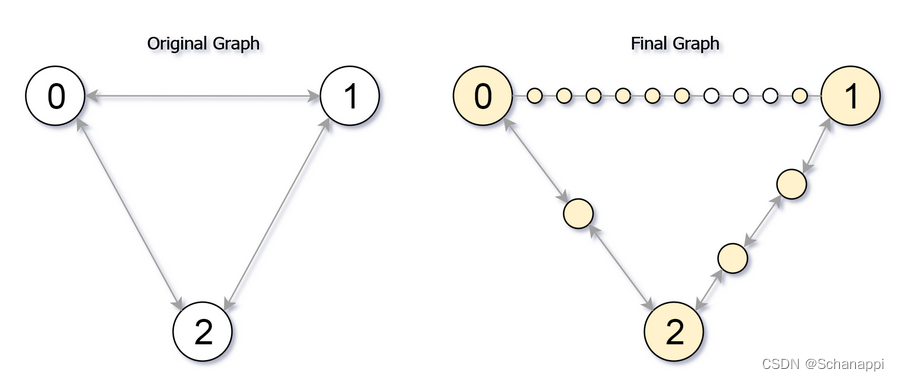
输入:edges = [[0,1,10],[0,2,1],[1,2,2]], maxMoves = 6, n = 3
输出:13
解释:边的细分情况如上图所示。
可以到达的节点已经用黄色标注出来。示例 2:
输入:edges = [[0,1,4],[1,2,6],[0,2,8],[1,3,1]], maxMoves = 10, n = 4
输出:23示例 3:
输入:edges = [[1,2,4],[1,4,5],[1,3,1],[2,3,4],[3,4,5]], maxMoves = 17, n = 5
输出:1
解释:节点 0 与图的其余部分没有连通,所以只有节点 0 可以到达。提示:
0 <= edges.length <= min(n * (n - 1) / 2, 104)
edges[i].length == 3
0 <= ui < vi < n
图中 不存在平行边
0 <= cnti <= 104
0 <= maxMoves <= 109
1 <= n <= 3000
方法一:Dijkstra
class Solution {
public:
int encode(int u, int v, int n){
return u * n + v;
}
int reachableNodes(vector<vector<int>>& edges, int maxMoves, int n) {
// 将输入的edges转换成邻接表adList
vector<vector<pair<int, int>>> adList(n);
for (auto &edge : edges) {
int u = edge[0], v = edge[1], nodes = edge[2];
adList[u].emplace_back(v, nodes);
adList[v].emplace_back(u, nodes);
}
unordered_map<int, int> used;
//unordered_set:无序 set 容器
unordered_set<int> visited;
int res = 0; // 记录可达节点数
// priority_queue 优先级队列,优先级最大的出队
// priority_queue<Type, Container, Functional>
// Functional默认是less 降序,greater 升序队列
// pair的比较,先比较第一个元素,第一个相等比较第二个
// 因此这里的意思是,一个元素为pair<int,int>的升序队列
// 每次取出的都是值最小的键值对
priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> pq;
// pair<step, node>
// 表示节点0到起点0的step = 0
pq.emplace(0, 0); // emplace原地构造一个元素并插入队列
// 当 pq 不为空 且 step <= maxMoves
while(!pq.empty() && pq.top().first <= maxMoves){
auto [step, u] = pq.top();
pq.pop();
// u 已经被访问过
if(visited.count(u)){
continue;
}
// u 没有被访问过
visited.emplace(u);
// 只考虑原始节点是不是可达节点
// 不考虑细分节点是不是可达节点
res ++; // 则u是可达节点
// 遍历u的邻接节点,加入pq队列
for (auto [v, nodes] : adList[u]){
// nodes 是 u 和 v 之间的细分节点
// step 指的是起点0到当前节点的距离
// 如果noded + step + 1 < maxMoves ,说明是可达节点
// !visited.count(v),说明未被访问
// 把节点 0 -> v 这一条路线加入考虑
// 也就是说可以通过这个路线考虑多包含一个节点
if(nodes + step + 1 <= maxMoves && !visited.count(v)){
pq.emplace(nodes + step + 1, v);
// 更新了step = nodes + step + 1
}
// 记录各条边上的细分节点的可达情况
// used key: u -> v 的边
// 比如节点0 到其他节点的边标记为 0*3+1=1, 0*3+2=2
// value: 这条边上的细分节点数
// 也就是说 used存储了u->v 的细分节点数
used[encode(u, v, n)] = min(nodes, maxMoves - step);
}
}
for (auto &edge : edges){
int u = edge[0], v = edge[1], nodes = edge[2];
// 比较 u->v 和 v->u 的可达节点数
// 因为这两条路线只可能计算一次,因此选择最小的
res += min(nodes, used[encode(u, v, n)] + used[encode(v, u, n)]);
}
return res;
}
};
心得
- 看到是难度是 困难 + 图,直接看题解了。
方法:Dijsktra算法
- 当图中只存在原始节点而不存在细分节点时,此题可以用 Dijkstra算法 解决: 将输入的 edges 转换成邻接表 adList,维护一个小顶堆 pq 可以依次计算出图中的起点到各个点最短路径,从而计算出可到达节点。 pq 中的元素为节点以及起点到该节点的路径长度,并以路径长度为比较元素。每次取出未访问过的节点中的路径最短的节点,并访问其邻接点,若路径长度仍小于等于 maxMoves 且未访问过,可将其放入 pq,直到 pq 为空 或 pq 最短路径大于 maxMoves 。
- 但当每条边都加入细分节点后,需要考虑细分节点是否可达。用一个哈希表 used 记录各条边上的细分节点的可达情况,键为二元点对 (u,v),表示从点 u 到点 v 的边,值为这条边上的可达细分节点数。注意在计算细分节点时,考虑单向的情况,分别计算 used[(u,v)] 和 used[(v,u)],并且这两个值不一定相等。计算 used 时,是要在访问路径最短的节点 u 的邻接节点 v 时计算。如果邻接节点的路径长度小于等于 maxMoves ,说明这条边上的细分节点都可达,否则只有一部分可达,并且这部分细分节点是靠近节点 u 的。
- 计算总的可达节点时,需要加上细分节点的部分。但是每条边上的细分节点可能会被计算过两次,即 used[(u,v)] 和 used[(v,u)] ,他们分别是靠近 u 开始计算的和靠近 v 开始计算的,需要去掉这两部分重叠的细分节点。
参考资料
- Dijikstra算法详解
- priority_queue用法详解